潛艇垂直面滑模控制仿真研究
2018-01-18 15:21:18陸斌杰李文魁周崗陳永冰
計算技術與自動化 2017年4期
陸斌杰+李文魁+周崗+陳永冰


摘 要:針對潛艇垂直面運動強非線性、耦合性和參數不確定的特點,分別基于垂直面非線性和線性模型,考慮舵的動態響應,用艏舵控制深度,艉舵控制縱傾角,采用改進型趨近律設計滑模控制器并進行了仿真研究。仿真結果表明,兩類滑模控制器均具有良好的控制性能和較強的魯棒性,且無明顯抖振。
關鍵詞:潛艇;滑模控制;魯棒性
中圖分類號:U666.1 文獻標志碼:A
Research and Simulation of Vertical Plane of Submarine Based on Sliding Control
LU Bin-jie,LI Wen-kui,ZHOU Gang,CHEN Yong-bing
(College of Electrical Engineering,Navy University of Engineering,Wuhan,Hubei 430033,China)
Abstract:Based on the submarine vertical nonlinear model and linear model and considering the rudder dynamic response ,the improved sliding reaching control law was used to design the bow rudder controller and the stern rudder controller in the presence of model of nonlinearity and parameter uncertainty for submarine vertical motion.The bow and stern rudder controller was used to control the depth and the pitch respectively.The simulations were carried and results show that the two control systems have great performance and strong robustness,and have few chattering problem.
Key words:submarine;sliding mode control;robustness
0 引 言
潛艇運動為六自由度空間運動,表現出大慣性、強非線性、各運動平面強耦合的復雜特點,通常難以獲得精確的數學模型,且用于潛艇控制設計的方程系數會由于環境、水深及潛艇狀態等的變化而變化,使系統工作點偏離設計狀態,影響控制效果,使控制器的設計難度大大增加。
國內外眾多學者基于經典控制理論和現代控制理論設計了潛艇控制器。基于伯德圖和根軌跡法設計的控制器對參數攝動和擾動魯棒性較差[1]。針對非線性系統的控制問題,多名學者進行了深入研究[2-3],但控制器結構復雜,難以實現。通過模糊方法設計非線性魯棒補償器,一定程度上可以簡化控制器的復雜度[4]。近年來,滑模控制(SMC,sliding mode control)對滿足匹配條件的任意攝動和外界干擾具有較強魯棒性,且其算法簡單、響應快速、易于過程實現,受到廣泛關注[5-9]。傳統的滑模控制方法采用極點配置法、最優控制等方法設計線性切換函數,利用基于邊界層方法的準滑模控制降低抖振,設計潛艇垂直面準滑模控制器。潛艇垂直面操縱運動為雙輸入雙輸出過程,深度控制通道與縱傾控制通道相互耦合,可通過解耦處理[10],在確保魯棒性的情況下也可忽略耦合[11-12]。不同機動情況下,潛艇水動力差異巨大,對控制模型的設計和控制器的魯棒性提出較高要求。文獻[13]采用線性化模型研究了潛艇大攻角下的滑模控制,起到了較好地控制效果。同時在不增加模型復雜度的情況下也可結合模糊控制等方法設計滑模控制器以降低抖振[14-16]。
基于以上考慮,為了獲得較為簡潔的滑模控制器控制模型且確保控制系統的魯棒性,以便應用于工程實踐,本文在潛艇空間標準運動方程的基礎上進行簡化,得到了垂直面非線性和線性操縱運動模型。分別進行滑模控制器設計,在無參數攝動和部分參數攝動及有無外界干擾情況下進行了對比仿真。仿真結果表明該控制器具有較強的魯棒性和削弱抖振的性能。
1 潛艇設計模型簡化
坐標系、名詞術語、符號規則均采用ITTC和SNAME術語公報的體系[17,18]。固定坐標系(定系)E-ξηζ和運動坐標系(動系)O-xyz如圖1所示。
1.1 垂直面非線性設計模型
1)縱向方程
2)垂向方程
3)縱傾方程
3)運動方程
3 仿 真
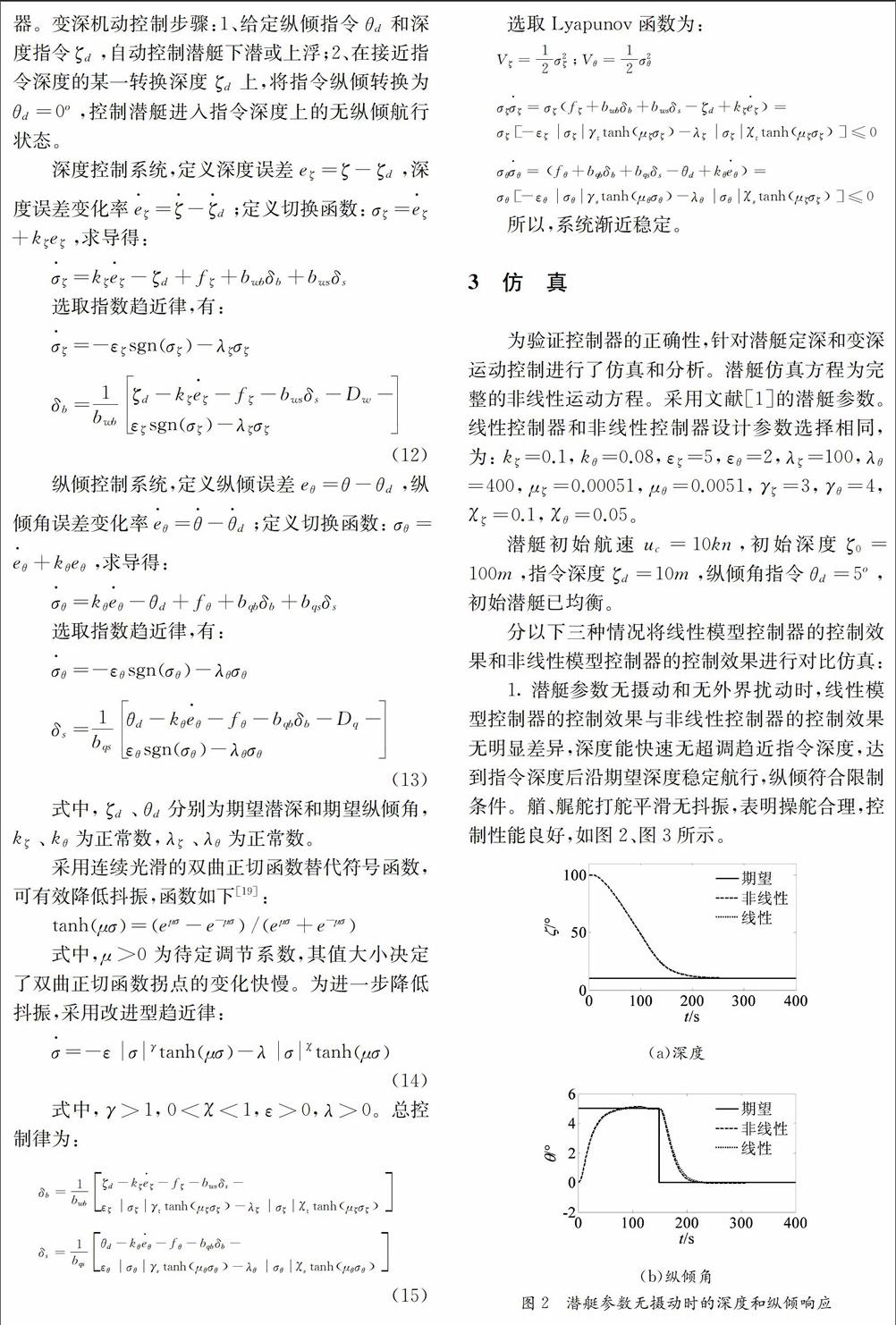
為驗證控制器的正確性,針對潛艇定深和變深運動控制進行了仿真和分析。潛艇仿真方程為完整的非線性運動方程。采用文獻[1]的潛艇參數。線性控制器和非線性控制器設計參數選擇相同,為:kζ=0.1,kθ=0.08,εζ=5,εθ=2,λζ=100,λθ=400,μζ=0.00051,μθ=0.0051,γζ=3,γθ=4,χζ=0.1,χθ=0.05。
潛艇初始航速uc=10kn,初始深度ζ0=100m,指令深度ζd=10m,縱傾角指令θd=5o,初始潛艇已均衡。
分以下三種情況將線性模型控制器的控制效果和非線性模型控制器的控制效果進行對比仿真:
1.潛艇參數無攝動和無外界擾動時,線性模型控制器的控制效果與非線性控制器的控制效果無明顯差異,深度能快速無超調趨近指令深度,達到指令深度后沿期望深度穩定航行,縱傾符合限制條件。艏、艉舵打舵平滑無抖振,表明操舵合理,控制性能良好,如圖2、圖3所示。endprint
3.無參數攝動但有外界擾動,為便于分析,任意選取正弦擾動信號:
dζ=50000sin(0.1πt)、dθ=50000cos(0.2πt)
控制器參數及初始條件不變,控制效果如圖6、圖7所示。經測試,當外界擾動力量級小于106時,系統仍能保持較好的控制性能,深度仍可快速無超調到達穩態,縱傾符合限制條件,舵角出現較小抖振。而當擾動量級大于107,兩類控制器控制下的系統均會出現大幅振蕩,舵角出現大幅高頻打舵現象,無法滿足控制條件。
4 結 論
基于潛艇垂直面非線性和線性模型,忽略艏艉舵之間的耦合,采用艏舵控制深度,艉舵控制縱傾的策略,分別設計滑模控制器。仿真結果表明,線性模型控制器和非線性模型控制器在參數無攝動和有攝動及有無外界干擾情況下控制效果無明顯差異,因此可采用垂直面線性模型設計垂直面滑模控制器,且為了確保系統的穩定性,對控制器參數的整定優化應做進一步研究,從而既降低了控制器復雜度,又有提高了控制器的魯棒性,對工程應用及研究具有重要意義。
參考文獻
[1] BABAOGLU O K.Design an automatic control system for a submarine[R].AD A-203925,1988.
[2] HWANG C N,Design of Robust Controllers for Manipulators[J].J National Cheng-Kung University:Sci Eng and Med Section,1991,26:213-234.
[3] HEALEY A J,LIENARD D.Multivariable Sliding Mode Control for Autonomous Diving and Steering of Unmanned Underwater Vehicles[J].IEEE J.Oceanic Engin.,1993,18(3):327-339.
[4] HWANG Cheng-neng,YANG Joe-ming.Design of fuzzy nonlinear robust compensator and its application on submarines[J].Journal of Marine Science and Technology,2003,11(2):83-95.
[5] SONG F,SMITH S M .A comparison of sliding mode fuzzy controller and fuzzy sliding mode controller[C]// Fuzzy Information Processing Society,2000.N A FIP S .19th International Conference of the North American.2000:480-484 .
[6] NAI O L,CHRISTOPHER E,SARAHK S.On output tracking using dynamic output feedback discrete-time sliding-mode controllers [J].IEEE Transactions on Automatic Control,2007,52(10): 1975-1981.
[7] CORRADINI M L,LEO T,ORLANDO G.Experinental testing of a discrete-time sliding mode controller for trajectory tracking of a wheeled mobile robot in the presence of skidding effects[J].Journal of Robotic Systems,2002,19(4):177-188.
[8] HEALEY A J,LIENARD D.Multivariable sliding mode control for autonomous diving and steering of unmanned underwater vehicles [J].IEEE Journal of Oceanic Engineering,1993,18(3): 327-339.
[9] NAI O L,CHRISTOPHER E,SARAHK S.On output tracking using dynamic output feedback discrete-time sliding-mode controllers [J].IEEE Transactions on Automatic Control,2007,52(10): 1975-1981.
[10] 羅凱,李俊,許漢珍.潛艇近水面運動的解耦控制[J].海洋工程,1999,17(3):27-32.
[11] 牟軍,許漢珍.潛艇操縱運動的變結構控制[J].華中理工大學學報,1997,25(6):33-37.
[12] 夏極,胡大斌.潛艇深度終端滑模控制技術[J].艦船科學技術,2012,34(2):55-62.
[13] 徐超,劉剛,徐國華,等.基于泵控液壓舵機的潛艇深度及縱傾控制[J].中國艦船研究,2017,12(2):116-123.
[14] 潘慧,佘瑩瑩,唐正茂.大攻角時的潛艇操縱控制技術[J].華中科技大學學報,2012,40(5):46-49.
[15] KIM H-S,SHIN Y-K.Expanded adaptive fuzzy sliding mode controller using expert knowledge and fuzzy basis function expansion for UFV depth control[J].Ocean Engineering,2007,34 (8-9):1080-1088.
[16] 戴余良,林俊興,苗海,等.潛艇空間機動的多變量滑模模糊控制[J].武漢理工大學學報:交通科學與工程版,2009,6(33):1040-1043.
[17] 中國造船編輯部.船舶動力學詞典[M].上海:中國造船編輯部,1981.
[18] Nomeneclature for Treating the Motion of a submerged Body Through a Fluid[R].SNAME Technical and Research Bulletin 1-5,1952.
[19] 蘇磊,姚宏,杜軍,等.飛行器自適應反推Terminal滑模軌跡跟蹤控制[J].系統工程與電子技術,2014,36(11):2249-2254.endprint