機器人欠驅動手爪驅動控制器設計
2018-01-23 12:35:13李開霞趙江海花加麗
制造業自動化 2017年12期
李開霞,趙江海,丁 玲,花加麗
(1.中國科學院合肥物質科學研究院先進制造技術研究所,常州 213164;2.江蘇省產業技術研究院機器人與智能裝備技術研究所,常州 213164;3.常州先進制造技術研究所,常州 213164)
0 引言
手爪作為機器人末端執行機構的關鍵組成部分,其相當于人類的手,主要用于對工具或者工件進行握持和操作,承擔著重要的操作執行功能。目前機器人手爪正朝著從簡單到復雜,從笨拙向靈巧的方向發展,欠驅動手爪作為一種欠驅動機構的仿人機器人手爪,人手是其研究對象與靈感來源,屬于多指手研究領域,目前被諸多研究者應用到機器人研究中。
中國科學院合肥物質科學研究院先進制造技術研究所對欠驅動手爪的研究工作已開展了多年,成功研制出了多種類型機器人欠驅動手爪,擁有多項發明專利,為欠驅動機構在機器人手爪中的應用積累了豐富的寶貴經驗,并具有多個機器人成功應用欠驅動手爪的案例[1~3]。欠驅動手爪在欠驅動手指機構的基礎上,研制形狀自適應手爪機構,集成了具有被動柔順和多種抓取功能的欠驅動手指機構,具有半主動柔順指面和主動適應性,進一步增強了手爪對物體形狀的適應能力,提高了手爪在實際應用中的可靠性。此類欠驅動手爪的設計充分吸納了欠驅動機構的優點,具有獨特的機械結構設計,具有驅動元件少、控制簡單、抓取適應性強和出力大等優點。本文以此為研究基礎,以實現欠驅動手爪在機器人系統中的靈活應用為目的而進行驅動控制器設計。
1 欠驅動手爪機械結構
如圖1(a)欠驅動手爪實物樣機所示[4~6],此款欠驅動手爪機構由形狀自適應欠驅動手指、平行四邊形精確捏取機構和手指位置調整機構三個部分組成。欠驅動手爪設計具有3個手指、手指基座外形為圓柱的形狀,整體形狀與人手相近,由手腕、手掌、手指以及各個手指的驅動傳動機構和拇指位置調整機構組成,能很好的實現對物體的抓持和操作,手指安裝到手掌上后,分別具有3個自由度,加上1個拇指機構旋轉自由度,整個手爪共具有10個自由度。拇指旋轉由一個安裝在手掌內的步進電機驅動,通過拇指的旋轉配合其他三個手指實現更多的抓取模式,拇指的旋轉角度范圍為0°~90°。
手指驅動傳動機構如圖1(b)所示[4~6],欠驅動手爪的3個手指機構的驅動傳動機構的驅動電機采用微型力矩電機,可以直接在電機的旋轉軸上配合設計螺紋副,從而將旋轉運動轉化成直線運動控制手指的開合。微型力矩電機帶動其螺桿轉動,螺桿的轉動和導軌對螺母的限制作用又使得螺母沿螺桿移動,通過其正反轉控制螺母的移動方向,通過控制螺母的移動距離從而與螺母連接的手指機構便處于不同的抓取、捏取或松開狀態。
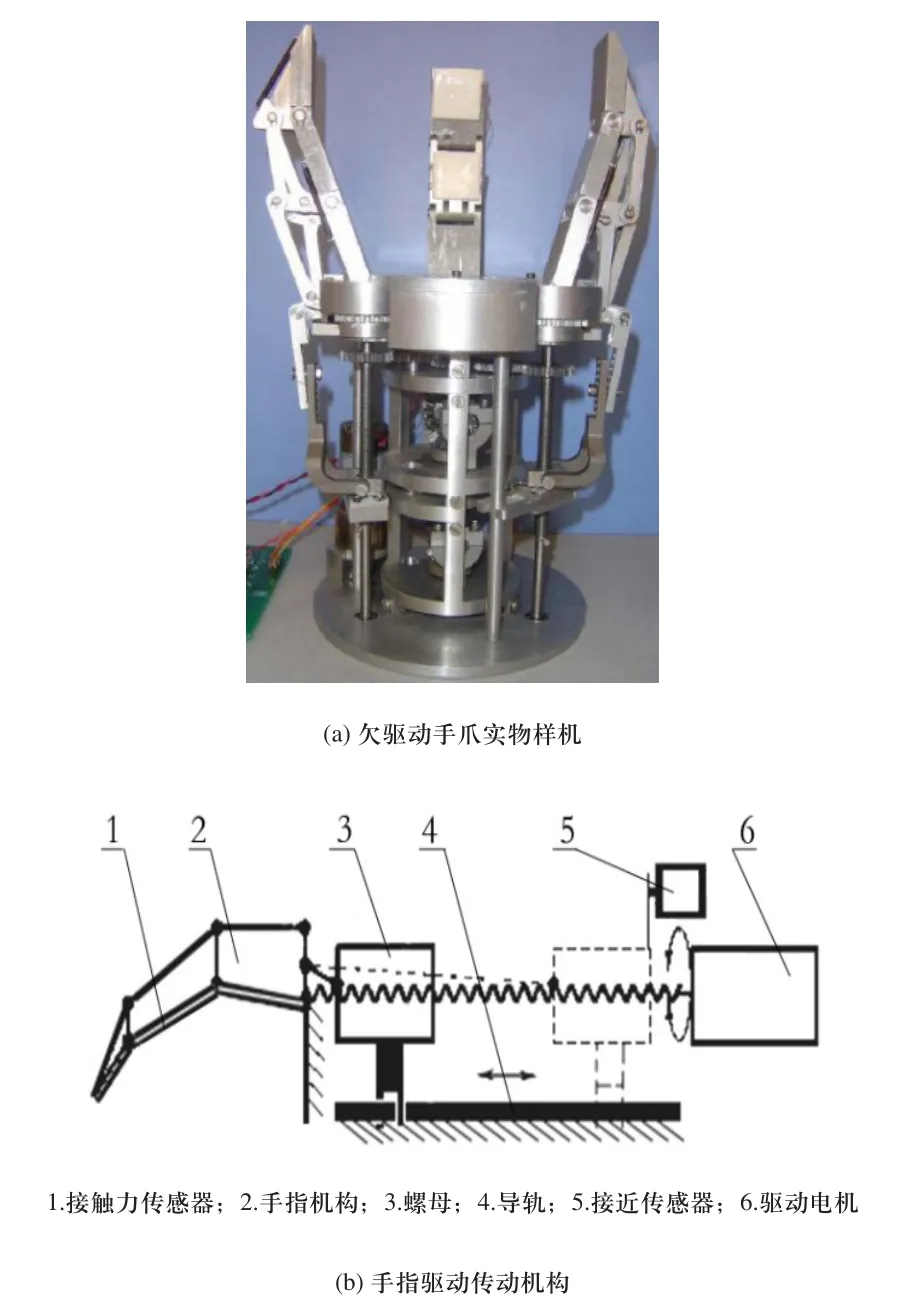
圖1 欠驅動手爪實物樣機與手指驅動傳動結構
欠驅動手爪設計中,3個手指的9個指面均可安裝觸力傳感器,根據實際需求選擇安裝(實驗中只在每個手指末關節安裝了傳感器),用于感知被抓取物體并獲取其相關信息。另外,在各手指的電機螺桿行程的末端極限位置以及旋轉機構極限位置,分別設置有限位開關,用于限制螺母沿螺桿的最大行程和旋轉機構的極限旋轉位置以保護驅動傳動機構。
2 驅動控制設計
2.1 驅動控制需求分析
欠驅動手爪的自適應抓取功能可分為包絡抓取和精確捏取兩大類,精確捏取分為三指平行捏取和三指對心捏取,包絡抓取分為三指平行包絡和三指對心包絡抓取。以上為欠驅動手爪具備的動作能力,但是手爪作為執行機構,是具有被動性的,因此,若想在機器人系統中讓欠驅動手爪完成機器人總控系統指定的任務,那么手爪必須與機器人系統進行集成應用,建立與之的通訊系統,這樣手爪才能實時接受機器人系統總控的命令與指揮,以機器人為領導而做出動作,配合完成任務而實現應用。
綜合考慮欠驅動手爪的機械結構設計與手爪功能設計后得出,欠驅動手爪的驅動、控制、檢測對象總結起來由三個微型直流力矩電機、一個步進電機、9個可選觸力傳感器(設計中檢測接口為3路)、4個限位開關以及與機器人系統的通訊接口組成,需要實現的功能為,機器人控制系統發送命令至驅動控制器,欠驅動手爪接收命令并執行,通過對手指指面觸力的檢測,結合電機電流檢測,限位檢測,實現手指速度與位置控制,從而實現對手指作用力的控制,完成欠驅動手爪的自適應抓取。
2.2 硬件設計
如圖2所示驅動控制器總體由以下幾部分組成:單片機MCU、電機驅動模塊、電流采樣模塊、限位開關模塊、壓力傳感器模塊、CAN總線通訊模塊及電源模塊。其中電機驅動與電流采樣模塊分別包含了三個直流力矩電機及一個步進電機。

圖2 驅動控制器統硬件框圖
根據系統需求對單片機MCU進行選型,綜合考慮各種資源需求,包括速度、存儲、IO、AD、CAN模塊等,最終選擇飛思卡爾工業級單片機MC9S08DZ60,在滿足豐富片上資源的同時,保證系統穩定可靠。電機驅動模塊驅動手爪電機運動,電流采集模塊用于對電機驅動電流進行采集,參與力計算的同時用于限流保護。單片機集成CAN控制器,經CAN驅動后與機器人控制系統的CAN接口組成CAN總線通訊,以此建立兩者之間的通訊系統。
觸力傳感器采用FlexiForce Sensor的MODEL A201(0-25lbs(110N)),信號經過信號調理電路的調制、放大、濾波等處理后送至單片機進行AD采集、計算,數據采集校準及標定參考傳感器的電導曲線進行[7]。
2.3 軟件設計
如圖3驅動控制器總體軟件流程所示,機器人控制系統根據需求提出控制任務,并通過CAN總線進行命令發送,驅動控制器在接收任務后,對欠驅動手爪的四個電機執行驅動命令,驅動手指調節初始姿勢,手指以預定速度運行,通過手爪上的接觸力傳感器獲取抓取過程中的力信息,判斷抓取穩定性,當手爪達到合適位置時,手爪對物體形成包絡抓取或是精確捏取姿勢,然后手指形成對被抓取物體的多點約束或是面約束,根據傳感器反饋的信息形成閉環,根據控制算法判斷是否完成了穩定抓取。
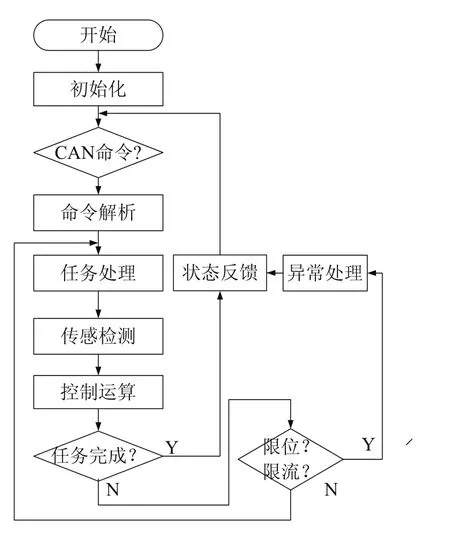
圖3 驅動控制器總體軟件流程
2.4 控制算法設計
接觸力的控制是穩定抓取的關鍵,由于欠驅動手指的特點,輸入和輸出之間具有高度的非線性,各個手指面的接觸力取決于物體對手指約束,抓取過程中可能出現某個接觸力過大或是手指和物體沒有接觸的情況,造成不穩抓取或是損害物體。因此,手爪抓取采用基于傳感器反饋的控制模式,關節指面安裝接觸力傳感器,實時檢測手爪在抓取物體過程中的動態接觸力,判斷手爪與目標物的接觸狀態,監測動態接觸力的變化過程,并根據反饋結果來調整抓取的接觸力大小。
單個手指的接觸力控制采用如圖4所示的模糊神經網絡算法進行力的控制[8,9],其中Fd為期望接觸力,Fn為實際檢測到的觸力,Ke、Kc、Ku分別為輸入誤差e、誤差變化Δe及輸出u對應的比例因子,限流保護用于避免因電流過大而損壞電機及驅動的保護環節。
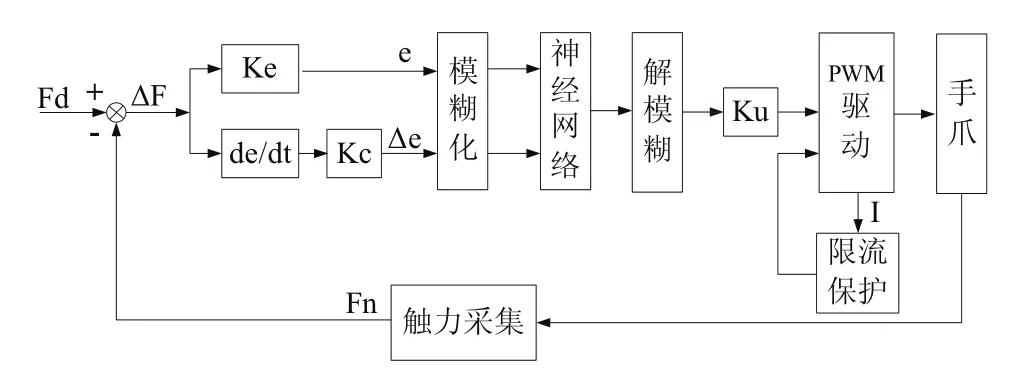
圖4 模糊神經網絡控制框圖
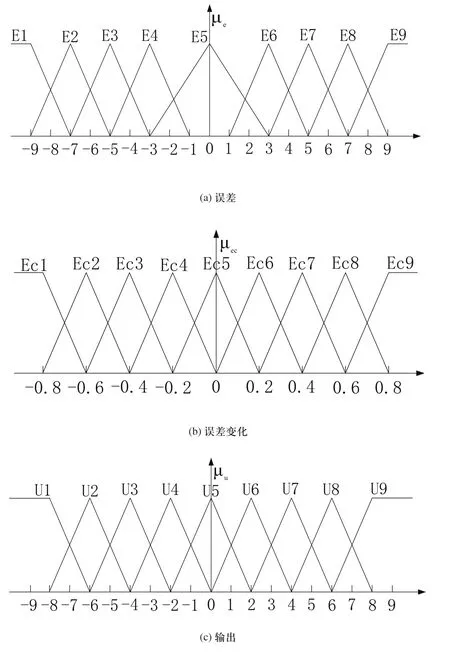
圖5 誤差、誤差變化及輸出隸屬函數
其中輸入誤差e、誤差變化Δe及輸出u分別用模糊集E={E1,E2,…,E9},Ec={Ec1,Ec2,…,Ec9},U={U1,U2,…,U9}表示,E、Ec及U的隸屬函數如圖5所示。采用如表1所示控制規則表,設計原則為:當誤差較大時,控制量的變化應盡量使誤差迅速減小,當誤差較小時,除了要消除誤差,同時需要考慮系統穩定性,防止產生不必要的超調,甚至引起震蕩。
便于在單片機中實現控制算法,采用Larsen模糊推理法結合神經網絡結構實現解模糊方法,如圖6所示。已知e=e0,Δe=Δe0,根據Larsen模糊推理法得到規則式:根據規則式共得出81條規則,分別對應9種輸出選擇,將對應于同一輸出UK的ωij進行取最大處理:例如:運用神經網絡結構進行去模糊化處理得到最終輸出:
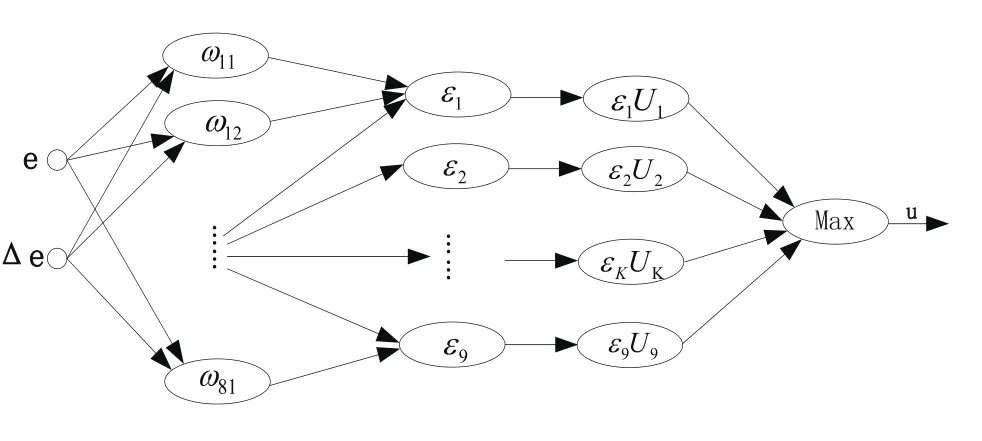
圖6 模糊神經網絡結構示意圖
3 實踐結果
根據欠驅動手爪機械結構設計具體要求,研制出控制驅動器樣機,電路板實物如圖7所示,電路板尺寸為直徑6.5cm,結構緊湊,集成度高,體積小。電路板設計可以根據具體機械結構設計配合做出相應外形尺寸調整,具有一定靈活性與通用性。直流工作電壓范圍為12~24V,最高輸出持續電流3A,峰值電流7A,工作溫度-15℃~+85℃。經反復測試實驗,樣機整體性能指標達到使用要求,能夠實現欠驅動手爪的驅動與控制。
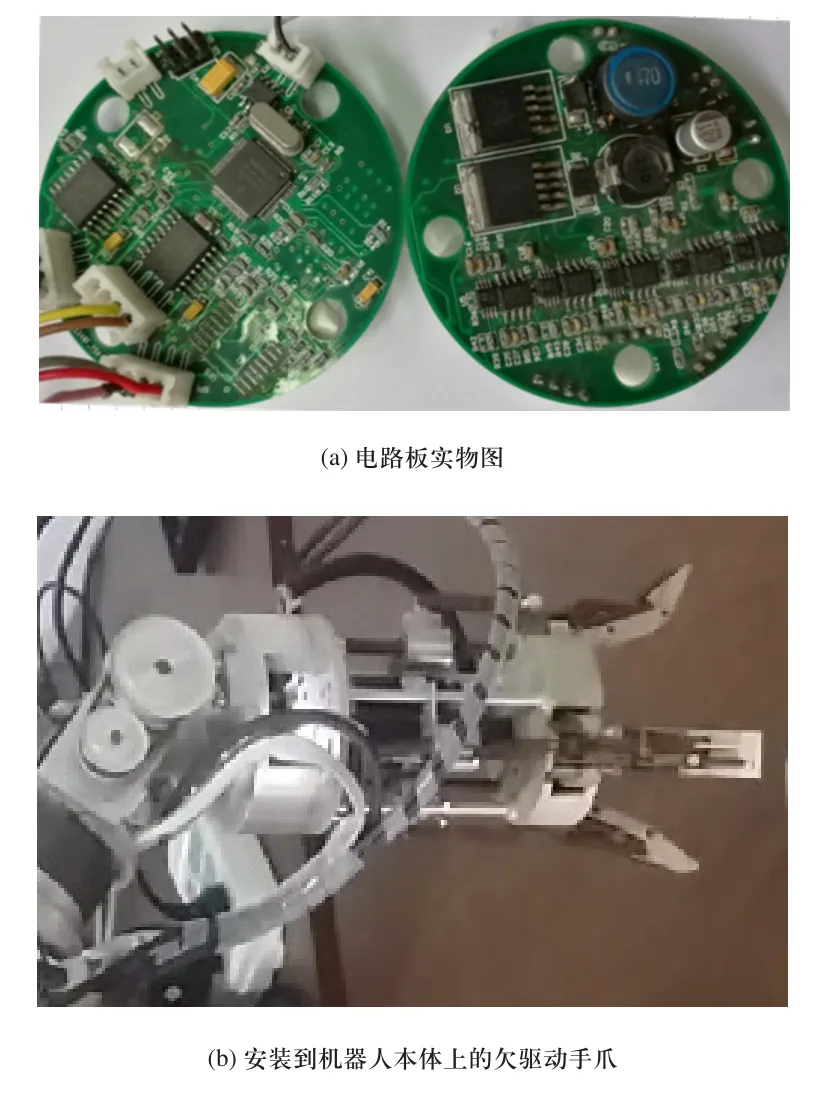
圖7 實物圖
將研制的欠驅動手爪及驅動控制器集成至工業機器人手臂上,構成高可靠性欠驅動多關節手爪抓取實驗平臺,通過大量抓取實驗驗證了驅動控制器設計的正確性和有效性[6,10,11]。
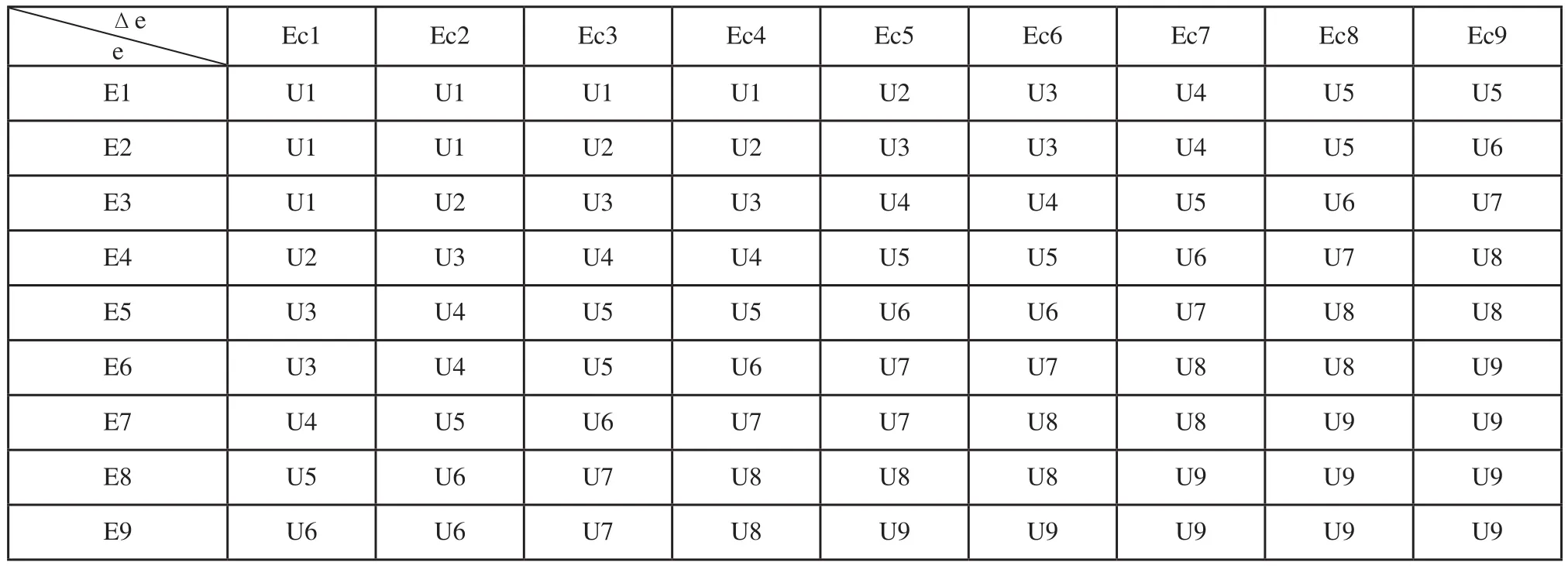
表1 模糊控制規則表
【】【】
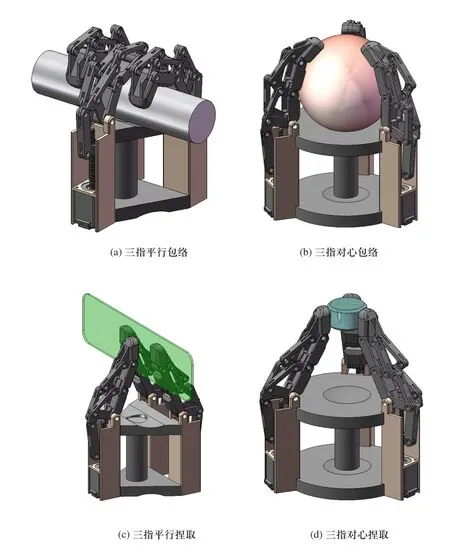
圖8 欠驅動手爪抓取
4 結束語
針對目標欠驅動手爪的機械結構,分析驅動控制需求后,綜合應用多項檢測與控制技術,設計出了結構緊湊,集檢測、驅動、控制及CAN總線傳輸于一體的欠驅動手爪驅動控制器,集成度高,功能完善,通過作用力控制,能夠滿足穩定抓取的功能需求。通過實驗驗證,欠驅動手爪驅動控制器能夠實現目標欠驅動手爪在機器人系統中的應用,為欠驅動手爪的普及應用提供了便利,同時也為欠驅動手爪的模塊化生產打下了基礎。下一步將針對驅動控制器在寬范圍電壓輸入、寬范圍功率輸出及模塊化應用方面做進一步改進與完善。
[1]Minzhou Luo,Tao Mei,Grasp characteristics of an underactuated robot hand[A].In Proceedings of the 2004 IEEE International Conference on Robotics and Automation[C].New Orleans,America, April 26-May 1,2004,pp.2236-2241.
[2]LUO Min-zhou,MEI Tao.Analysis and simulation of enveloping grasp stability of the multi-phalange underactuated robot hand[J].Optics and Precision Engineering.VoI.12,NO.5,Oct.2004:510-517
[3]駱敏舟,梅濤,盧朝洪.多用途欠驅動手爪的自主抓取研究[J].機器人,2005,27(1):20-25,30.
[4]李濤,駱敏舟,張志華,路巍,徐林森.基于欠驅動機構的仿人機器人手爪設計[J].機電一體化,2010,16(1):29-33.
[5]李濤,駱敏舟,時張杰,徐林森.欠驅動仿人機器人手爪的精確捏取與包絡抓取研究[J].機械設計,2009,26(11):42-44.
[6]李濤.基于欠驅動機構的仿人機器人手爪研究[D].合肥:中國科學技術大學,2009.
[7]FlexiForce Sensor User Manual (Rev H). http://www.tekscan.com.
[8]李偉.基于觸覺傳感器的仿人假手抓取控制研究[D].哈爾濱:哈爾濱工業大學,2014.
[9]潘偉.基于嵌入式的機器人多傳感器及信息融合系統研究[D].杭州:杭州電子科技大學,2012.
[10]張波,陳丹惠,陳儉.雙臂機器人多功能欠驅動手爪的研制[J].產業與科技論壇,2017,16(1):69-70.
[11]丁玲,孫鵬,李開霞,趙江海,王容川,葉曉東.一種機械手爪的控制裝置及其控制方法[P].發明專利,申請號:201610413425.4,2016.
