基于ROS的六自由度機械臂避障研究
2018-01-23 12:35:16
制造業自動化 2017年12期
(江西理工大學 機電工程學院,贛州 341000)
0 引言
機器人的運動規劃一直是機器人研究的重點,目前工業上使用的機器人大多數為工人點對點示教實現的,人為來示教即費時又費力。要想機器人能夠生成一條無碰撞的最優軌跡,必須解決機器人避障的難題。
計算機虛擬控制及仿真平臺為機器人運動規劃的研究提供了方便,SolidWorks、Ansys、MATLAB、Adams等是目前使用較為普遍的軟件平臺,這些平臺各有千秋,但對完成復雜環境下的機器人運動不夠方便直接。MATLAB作為一款數學計算軟件,能夠利用其強大的算法來完成仿真實驗,但對3D模型的表現力較差,且很難與外部系統和其他功能需求相結合[1]。SolidWorks等三維建模軟件雖然可以出色的完成機械的建模,但卻不能實現算法的驗證[2]。現階段,大多都使用C、C++、Java等編程語言與Open Inventor或OpenGL想結合編寫圖形仿真系統,但是操作起來比較復雜,其仿真系統也主要是觀察系統的運動過程,數據參數不具有參考性[1]。在跨平臺,分布式處理,代碼復用,多語言支持與硬件抽象等一些共性問題上也支持不夠。而ROS開源操作系統能夠很好的解決這些問題,且能夠直接應用于實際系統[3]。本文基于ROS開源平臺,以ABB公司IRB1410型工業機器人為研究對象進行避障運動規劃的仿真研究。
1 機械臂運動學分析
正運動學問題主要涉及機械臂的各個關節與工具或末端執行器的位置和姿態之間的關系。正運動學的求解過程就是根據機器人已知關節變量,來求解末端執行器的位姿。運用D-H參數法進行串聯機器人正運動學求解,就是通過坐標轉換的思想把末端執行器的位姿在坐標系里表示出來[4]。根據D-H參數法建立的ABBIRB1410機械臂坐標系如圖1所示。
圖中基坐標系為X0Y0Z0組成的坐標系,末端執行處的坐標系為X6Y6Z6組成的坐標系。根據IRB1410機械臂的相關參數可以列出機械臂的D-H參數表,i表示連桿,di表示連桿偏置,ai表示連桿長度,αi表示連桿扭曲,θi表示變量關節角度,如表1所示。
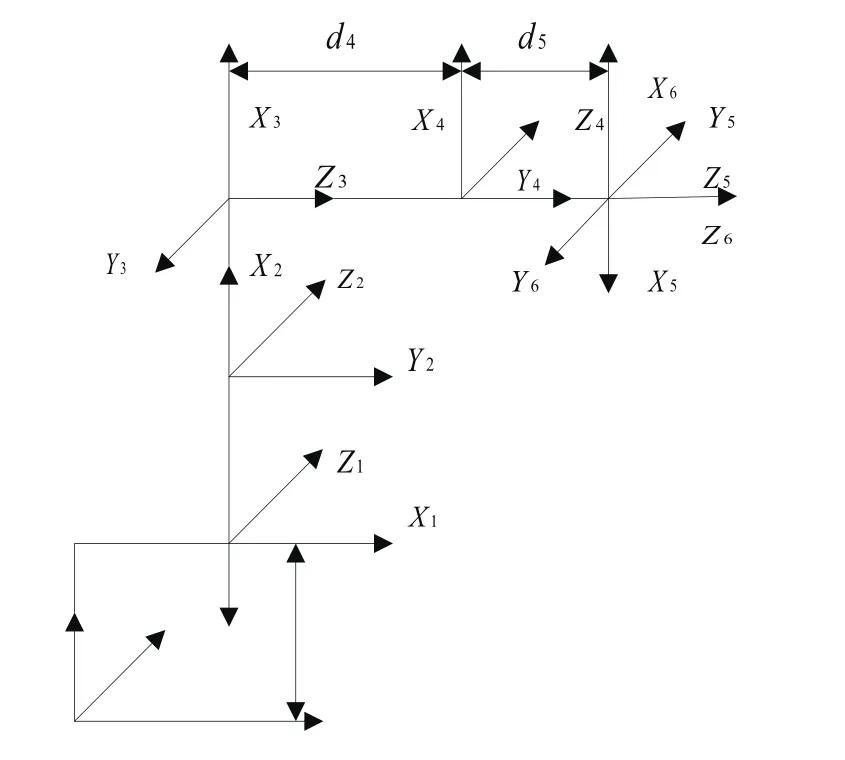
圖1 ABB IRB1410機械臂連桿坐標系
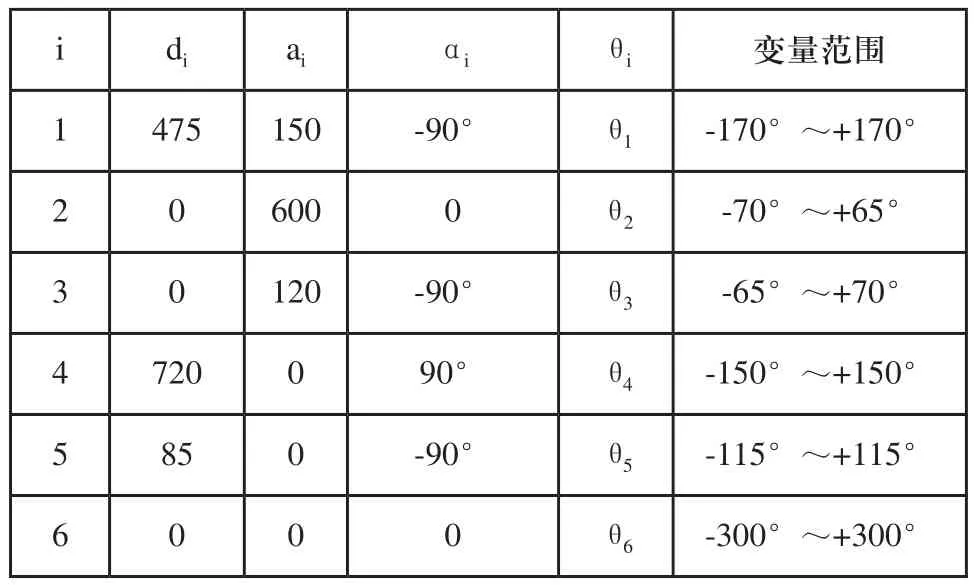
表1 機械臂D-H參數表
對全部連桿規定坐標系后,由兩個旋轉和兩個平移來建立相鄰兩連桿i-1與i之間的相對關系,且可由四個其次變換來描述,可表示為A矩陣:
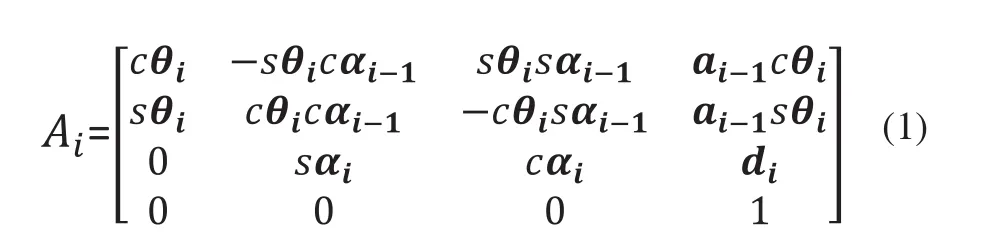
式(1)中cθi=cosθi,sθi=sinθi,cαi=cosαi,sαi=sinαi,進一步得到機器人的運動學方程為:

式(2)中n,o,a表示末端執行器相對于基坐標的姿態;p表示末端執行器相對于基坐標的位置關系。把表1中的參數分別代入式(1)、式(2),便可得到機器人運動學正解[5]。
2 運動規劃功能包配置
2.1 開源機器人操作系統ROS
ROS操作系統是一款開源的機器人后操作系統,為了提高機器人研發領域的代碼復用率,提高開發效率,ROS對機器人硬件進行了封裝,使得不同的機器人和不同的傳感器都能夠在ROS里通過一樣的形式來表示,從而給上層的功能包(運動規劃,三維導航等)提供調用。且ROS可以在不同的計算機,不同的操作系統和不同的機器人上使用,做到真正的跨平臺[6]。
ROS操作系統集成了許多的開源工具與先進的算法,如MoveIt移動機械臂運動規劃模塊,Rviz 3D可視化工具,Player二維仿真平臺,OpenRave運動規劃平臺,OpenCV視覺開源項目,OMPL運動規劃開源項目,Gazebo機器人開源仿真平臺,PCL開源點云處理庫等。且能夠支持多種編程語言,如C++、Python、Octave等,采用模塊化的通訊機制,開發者對各模塊中的代碼能夠單獨編譯。ROS系統免費且開源,這是其快速發展的主要因素之一[6]。
2.2 由SolidWorks制作URDF文件
統一機器人描述格式(Unified Robot Description Format)是一種用于描述機器人結構,關節,自由度等的XML格式文件。URDF文件描述了機器人的各個部件與相關關節的連接關系,確定了從基座到執行末端各個部件的坐標系和坐標原點。制作URDF文件,首先需要通過SolidWorks對機械臂進行三維建模,然后通過SW2urdf插件對機械臂的各個關節和連接進行設置,最后導出URDF文件。
2.3 由MoveIt!配置功能包
MoveIt!是ROS中專門針對移動機械臂操作的功能包,它結合了運動規劃,三維感知,運動學,碰撞檢測,控制和導航等,它為開發先進的機器人提供了一個簡單,實用,開放的平臺。使用MoveIt Setup Assisant可生成MoveIt!配置功能包。具體步驟如圖2所示。
在添加運動鏈的時候,我們需要對求解正運動學與逆運動學的求解工具進行選擇,本文選擇KDL(The Kinematics and Dynamics Library)作為運動學求解工具。KDL是一個運動學與動力學的庫,其優勢在于能夠輕易的解決多自由度單鏈機械結構的正逆運動學問題。配置好相關參數就可以對機械臂進行運動規劃。
3 機械臂避障規劃
3.1 避障規劃算法
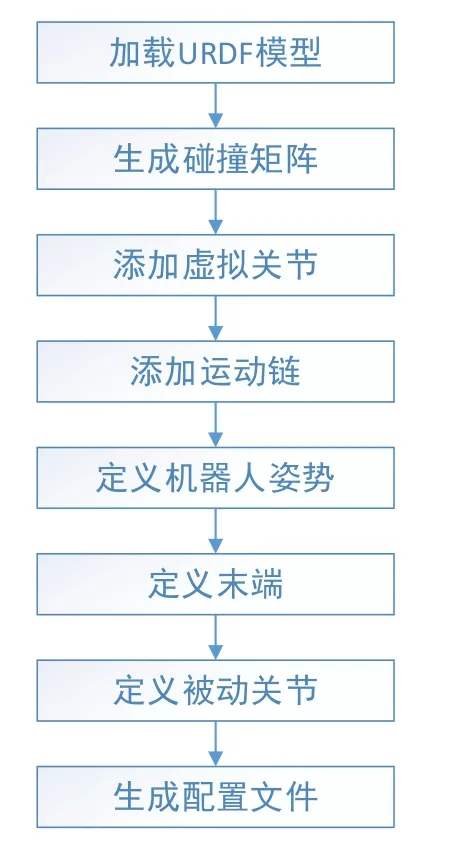
圖2 MoveIt!配置步驟
避障路徑規劃問題就是在具有障礙物的特定環境中,依照相關評價標準(找到最優解或找到有效解),規劃出一條從起始點到目標點的無碰撞路徑。對于找到最優解,大多數算法使用最優規劃,對于快速找到有效解,一般使用采樣規劃。ROS平臺中的OMPL是一個包含了許多運動規劃領域前沿算法的開源運動規劃庫,其中大部分算法基于采樣原理。本文以RRT及其擴展算法作為規劃算法對機械臂進行仿真分析[7]。
RRT算法是一種基于隨機采樣的快速搜索算法,它首先通過采樣得到一個隨機樣本,然后把它存儲在一個樹狀的結構中,通過樹狀結構的分支繼續往未知空間搜索,直到到達目標點為止。RRT算法的運動樹如圖3所示。
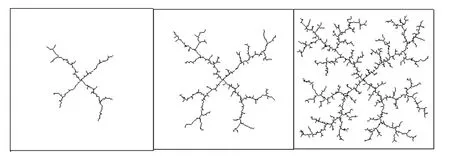
圖3 RRT算法運動樹
RRT迅速的在各個方向擴展,快速的擴展到空白區域的四個角落。給定一個初始狀態qinit,和一個活動區域C,我們可以建立一個樹狀結構G來探索如何在C中活動,并最終到達目的地。假設當前G中共有K個頂點(vertex)。那么RRT可以表示為以下流程:
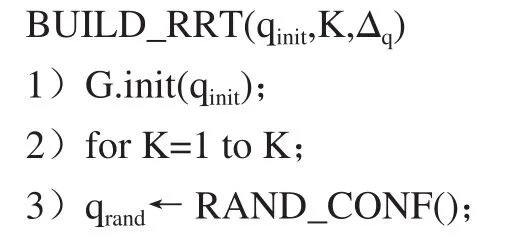
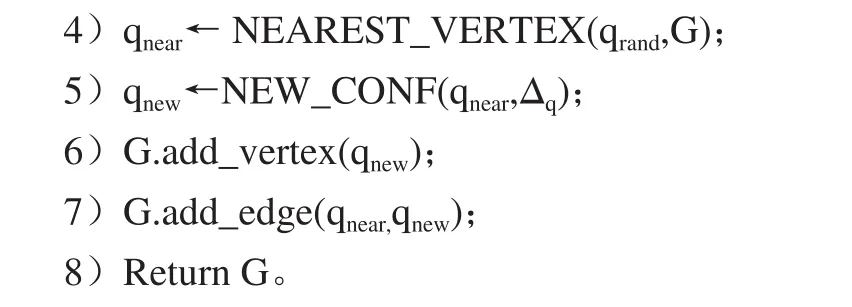
RRT算法的構建過程為:給出起始點qstart,隨機的選取一個新狀態qrand,找出樹G上離隨機點qrand最近的點qnear,最后把qnear沿著qrand的方向移動Δq,得到新的節點qnew,不停地搜索下去,直到達到目標點為止。
3.2 ROS避障規劃實現
在新的終端中啟動前面MoveIt!所配置的功能包中的demo文件,進入Rviz界面,可以自己編輯添加障礙物文件,通過拖動機械臂末端來設置機械臂的起始位置與目標位置,選擇OMPL運動規劃庫中的規劃算法RRT,并發布到當前環境中,點擊Plan規劃按鈕,系統就會生成了一種可能的規劃路徑,并顯示在Rviz窗口中。圖4所示為配置好的仿真環境,深色為設置好的機械臂起始位置,淺色為目標位置。機械臂必須繞過小桌平面上的長方體型障礙物到達目標位置才算完成規劃。當沒有使用RRT規劃算法時,機械臂會直接穿過障礙物到達目標位置。圖5所示為通過RRT算法進行避障規劃形成的路徑,可以非常直觀的看到機械臂成功避開了障礙物。
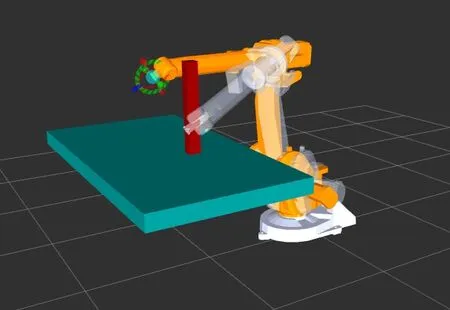
圖4 機械臂起始位置與目標位置
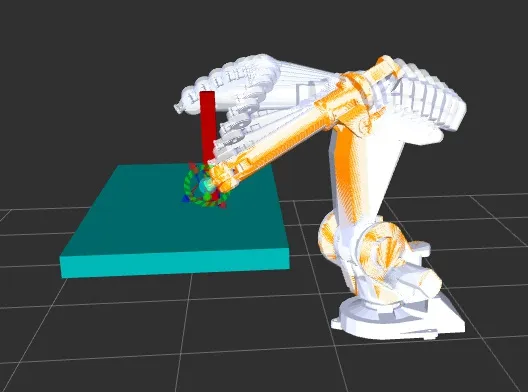
圖5 機械臂避障規劃路徑
【】【】
在終端輸入rqt_plot命令,在地址欄里輸入節點joint_states,能夠得到各個關節運動曲線圖,圖6所示為關節的位置曲線圖,橫坐標為時間變化,縱坐標為關節位置變化,可以較為清楚的看出各個關節位置變化曲線。
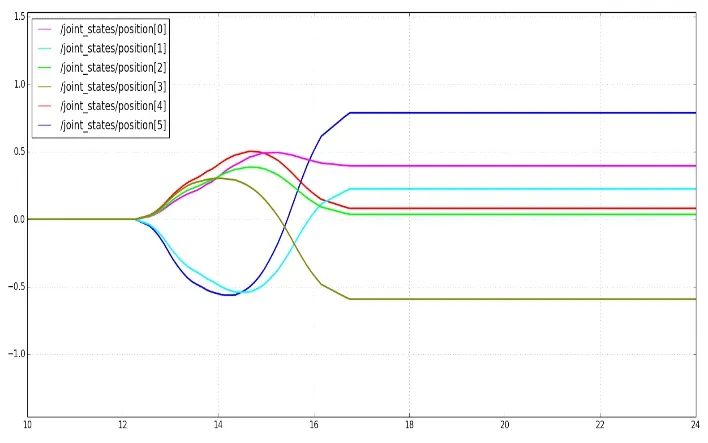
圖6 MoveIt!各關節位置曲線圖
我們也可以通過rosbag record–a命令記錄下機械臂運動過程中相關的參數數據,并利用MATLAB進行二次分析,圖7圖8為MATLAB分析得到的曲線圖。可以看出與rqt_plot所繪制的曲線基本相同。
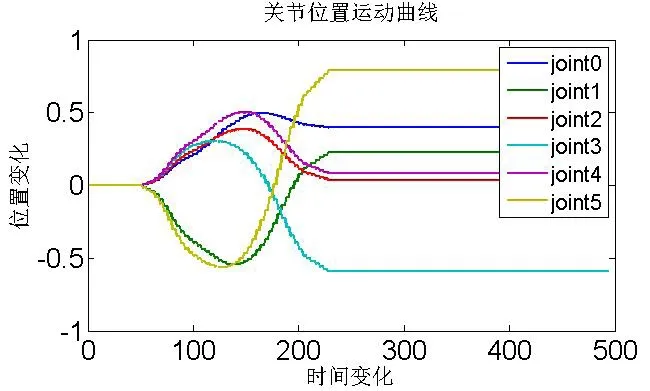
圖7 MATLAB關節位置曲線
4 結束語
本文利用ROS平臺,結合隨機采樣算法對機械臂進行避障路徑規劃,較為形象的展示了機械臂的運動過程,并可以導出相關數據利用MATLAB進行二次分析,相比其他平臺,ROS平臺直觀高效,具有很高的開放性與擴展性,極大的方便了機器人的研究。

圖8 MATLAB各關節位置曲線
[1]祁若龍,周維佳,劉金國,等.VC平臺下機器人虛擬運動控制及3D運動仿真的有效實現方法[J].機器人,2013,35(5):594-599.
[2]陳盛龍,平雪良,曹正萬,等.基于ROS串聯機器人虛擬運動控制及仿真研究[J].組合機床與自動化加工技術,2015(10):108-111.
[3]Bihlmaier A,W?rn H. ROS-Based Cognitive Surgical Robotics[C].Workshop Proceedings of, Intl.Conf. on Intelligent Autonomous Systems.2014:253-255.
[4]馬克W.斯龐.機器人建模和控制[M].機械工業出版社,2016.
[5]韓秀姝,王吉岱,魏軍英,等.碼垛機器人運動學分析[J].機械傳動,2014(9):109-112.
[6]陳金寶.ROS開源機器人控制基礎[M].上海交通大學出版社,2016.
[7]代彥輝,梁艷陽,謝鋼.基于RRT搜索算法的六自由度機械臂避障路徑規劃[J].自動化技術與應用,2012,31(10):31-37.
猜你喜歡
電腦報(2020年35期)2020-09-17 13:25:53
公民與法治(2020年11期)2020-07-25 02:02:06
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
領導決策信息(2018年50期)2018-02-22 06:17:16
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
科技知識動漫(2016年8期)2016-07-29 20:40:09
