四自由度機器人抓取運動目標建模與軌跡規劃
2018-01-23 12:35:16
制造業自動化 2017年12期
關鍵詞:規劃
(西安工程大學 電子信息學院,西安 710048)
0 引言
隨著制造業自動化需求的提高,機器人已被廣泛應用到各行各業,隨之對機器人自主抓取的工作精度和運動平穩度的要求也越來越高[1]。自主抓取系統的核心是抓取規劃器的建立,軌跡規劃是對機器人的運動路徑進行描述,使其運行更平穩[2],其大多數軌跡規劃算法主要是利用拋物線、多項式以及不同曲線相結合[3]。文獻[4]利用Matlab對Dobot機器人進行正逆運動學分析建模和五次多項式插值軌跡規劃仿真,為實際應用研究和開發提供了理論依據。文獻[5]分析比較了在工業機器人軌跡規劃中采用三、五次多項式的運動性能,結果表明,五次多項式的軌跡規劃效果優于三次多項式樣條。文獻[6]采用五次B樣條曲線插值方法進行關節軌跡規劃,仿真結果表明,該方法運動性能顯著優于傳統的三次樣條軌跡規劃。在實際工程應用中,常采用五次多項式對關節軌跡進行規劃,該算法相對較簡單,運算量不大,但該算法關節位移變化大,任意關節點參數的變化都會造成機械臂的振動和沖擊,影響機器人工作的平穩性,使五次多項式的應用受到了局限[7,8]。
本文研究了一種四自由度機器人抓取運動目標的建模與軌跡規劃,并進行運動學分析;采用七次多項式對抓取運動目標過程進行軌跡規劃,使抓取過程順利完成,并利用Matlab中Robotics工具箱對四自由度機械手和抓取過程進行建模仿真,結果表明,四自由度機器人自主抓取規劃滿足要求,能夠對運動目標進行穩定和準確地到抓取,有效地降低了硬件開發成本且有利于運動控制。
1 四自由度機器人的運動學分析
四自由度機器人可看成由一系列剛體通過關節連接而成,這些剛體通常被稱為連桿,連桿共有4個基本屬性參數。其中關節1,2,4是旋轉關節,關節3是垂直升降關節。圖1為四自由度機器人本體結構,根據改進的D-H表示法,建立坐標系的簡化圖,如圖2所示。根據機械臂的結構和連桿坐標系,可得出連桿參數和關節變量[9],如表1所示。
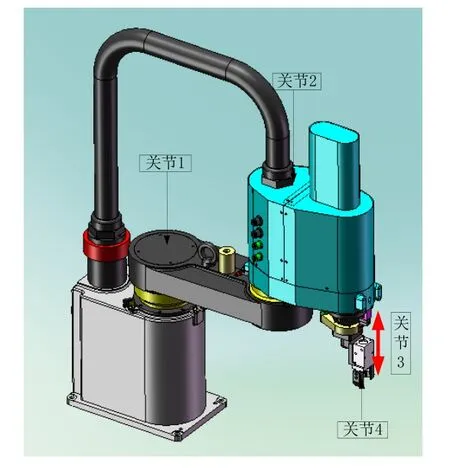
圖1 四自由度機器人本體結構
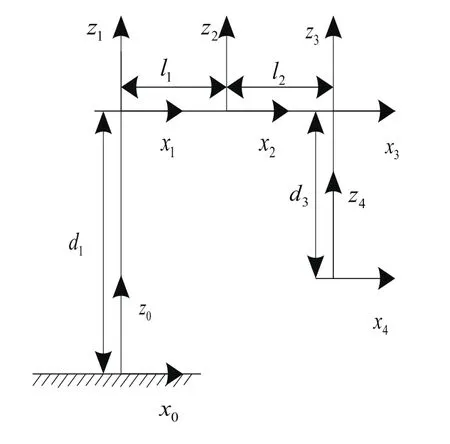
圖2 四自由度機器人的連桿坐標系
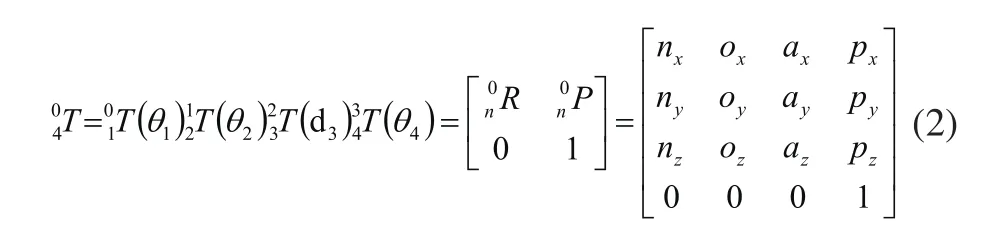
將四自由度機器人各連桿變換矩陣相乘,可得到末端執行器的位姿方程為:
2 運動學建模與仿真
首先,構建四自由度機器人的模型是進行仿真首要完成的任務,采用機器人工具箱構建模型,以表1中的D-H參數為依據來構建四個關節,然后利用工具箱提供的Link和SerialLink函數將各關節有機組合來實現整個機械臂的構建。在Matlab中利用Robotics Toolbox中提供的Link和SerialLink函數對四自由度機械臂進行建模,建立的四自由度機器人模型如圖3所示。
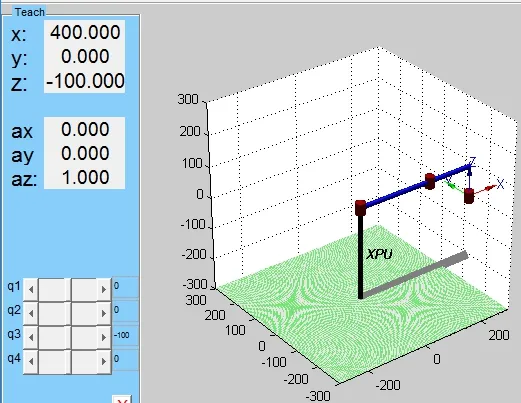
圖3 四自由度機器人三維圖
圖3左側是滑塊控制,右側是機器人是三維模型。x,y,z表示末端執行器的位置,ax,ay,az表示末端執行器的姿態,各關節的初始位置q=[0 0 0 0],q1,q2,q3,q4為四自由度機器人相應的四個關節角度值。通過移動滑塊,可直觀的觀測到機器人不同的位姿。
利用函數fkine計算正運動學解,仿真結果如下:
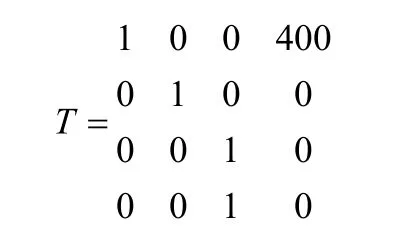
各關節角度都為零,直角坐標R(x,y,z)為(400,0,0)是一致的,驗證了在第1.1節中采用機器人工具箱構建的四自由度機器人模型的正確性。
3 四自由度機器人軌跡規劃
機器人模型構建完成后,通過計算機控制,機器人從初始點運動到目標點進行抓取操作,這個過程需要進行運動學軌跡規劃。為了使抓取更加合理準確,本文采用Matlab中機器人工具箱,在關節空間中對點到點的路徑進行規劃。已知在操作空間中的兩點,用逆運動學將笛卡爾坐標映射到關節空間,再對其進行多項式插值[11]。

表1 四自由度機器人D-H參數表
3.1 七次多項式規劃
一般基于多項式插值的運行曲線比基于線性插值的運動軌跡速度、加速度曲線更為光滑連續沒有突變,即機器人軌跡精度較好[12]。若需機器人各個關節運行平穩,應選多項式插值算法,其中七次多項式插值比三次、五次更平穩,運動性能更優,因而本文采用七次多項式進行關節空間中軌跡規劃,設七次多項式:

各關節在起點和終點的位置、速度、加速度和沖擊的約束條件為:
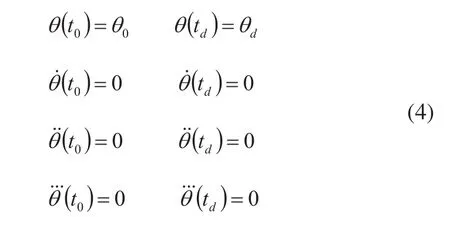
對式(3)求一階、二階、三階導可得:
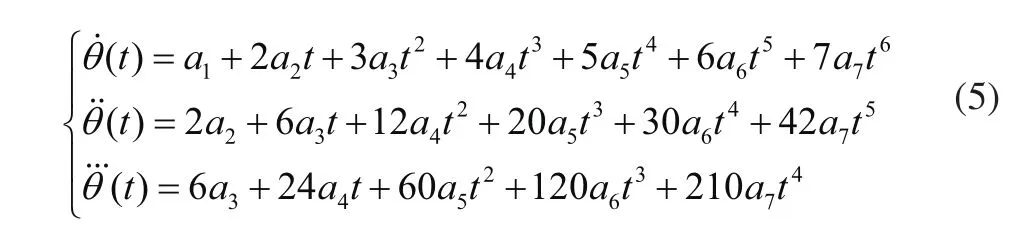
聯立式(3)~式(5),可得:

式(6)是該關節的七次多項式的軌跡函數,它確定了從θ0到θf任意時刻的關節位置。該關節的角速度和加速度均為拋物線,其函數公式如式(7)所示:
3.2 軌跡規劃的任務要求
本文四自由度機器人主要實現的是對運動目標的抓取,動作較為簡單,所以采用PTP軌跡規劃方法。設抓取點為A,首先運動到抬高點B,然后再將B點視為起始點,運動到降落點C,最后將C點視為起始點,繼續運動到放置點D。機器人末端執行器軌跡路徑取決于抓取運動目標的任務要求,即從抓取點A出發到達放置點D,中間經過抬高點、降落點。現設定A(228,50,-337)、B=(228,50,-282)、C=(-65,395,-315)、D=(-65,395,-337)。從A點到B點,以及C點到D點,這兩段運動過程均為機器人做上升或下降的垂直運動,關節1,2,4位姿保持不變,只有關節3的姿態發生變化。B、C點的存在就為使機器人末端運行的路徑光滑且連續并盡量減少對電動機的沖擊,故BC段是本文軌跡規劃的主要部分。抓取軌跡路線如圖4所示。
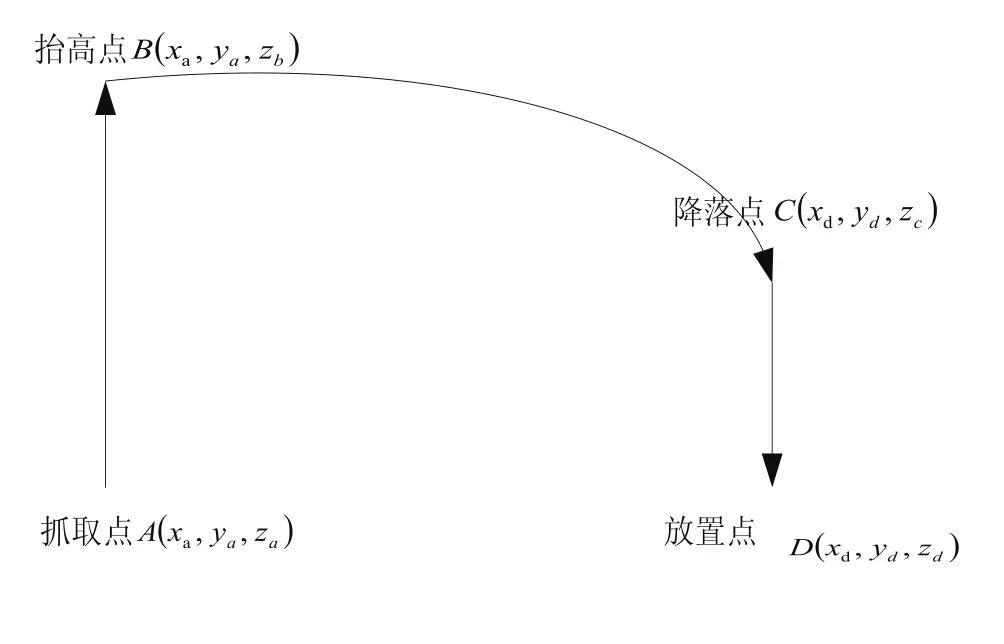
圖4 抓取過程中軌跡路線
根據四點的坐標通過逆運動學求解出各點的各個關節轉角qA,qB,qC,qD,即qA=[0.8433 -1.9898-337.0000 0]、qB=[0.8433 -1.9898 -282.0000 0]、qC=[1.7321 0.0046 -315.0000 0]、qD=[1.7321 0.0046-337.0000 0],然后,根據七次多項式的約束條件,求解出各關節的插值函數,確定機器人預期的軌跡路徑。
4 建模與仿真
在Matlab環境下,利用機器人工具箱建立四自由度機器人結構模型,設定四自由度機械臂的仿真時間是3s,即已知從抓取點A運行到放置點D的空間坐標,利用ikine函數可求出各個關節角,采用七次多項式插值的軌跡規劃算法對從A到D點的抓取過程進行仿真,本文主要對BC段進行軌跡規劃,如圖5所示。
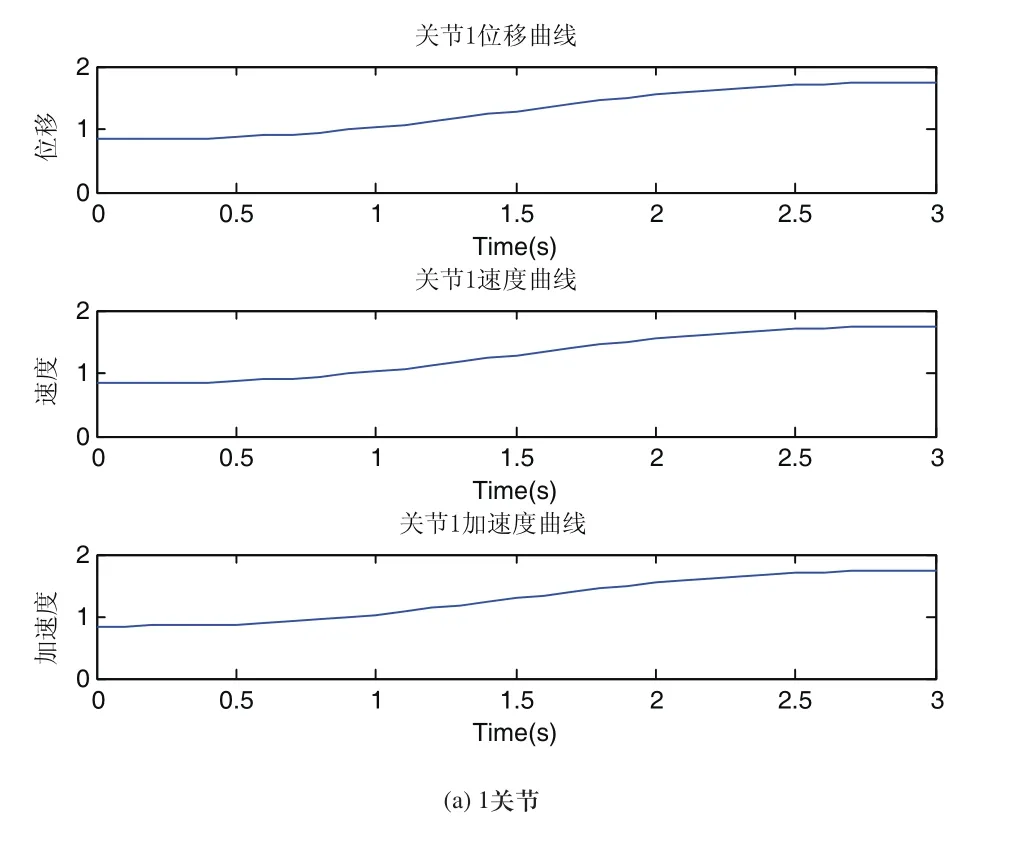
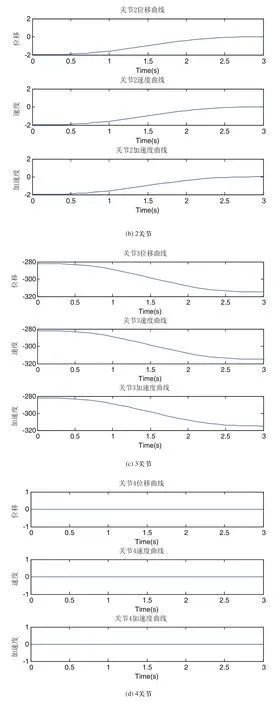
圖5 抓取過程中BC段各關節的變化曲線圖
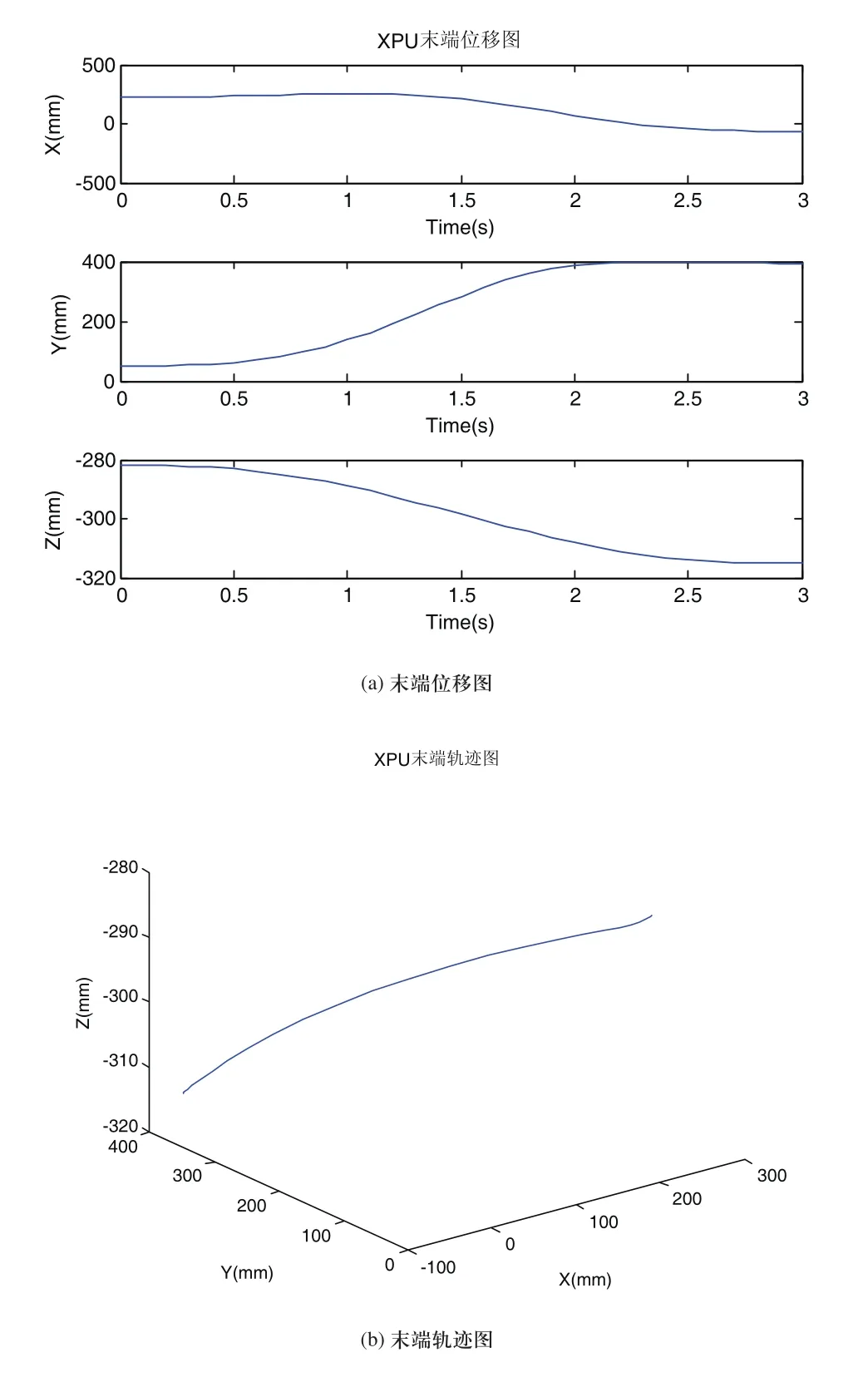
圖6 BC段末端位移圖和軌跡曲線
圖5為各個關節的位移、速度和加速度的變化曲線,運行的速度,加速度均平滑,沒有突變,運行連續且平穩;在軌跡規劃過程中各關節運動狀態正常,各連桿均未出現錯位情況,符合抓取過程中軌跡規劃的要求。圖6為四自由度機械人末端在BC段運動的位移圖和軌跡曲線均變化連續沒有突變,故在對運動目標抓取過程中,實現了機器人平穩的抓取軌跡規劃。
5 結論
為使四自由度機器人的運行更加平穩,提高軌跡規劃精度。本文提出采用七次多項式插值算法對給定的PTP的作業要求進行軌跡規劃,在Matlab平臺下仿真實現機器人軌跡規劃。實驗結果表明,在抓取運動目標過程中,各關節位移、速度及角加速度隨時間變化曲線連續沒有突變,實現了機器人運行平穩且連續,提高了機器人運動性能,是一種穩定可靠的軌跡規劃方法。為以后四自由度機器人的研究和開發提供了理論依據,實驗的后期工作則是將該方法在四自由度機器人平臺上用C++語言編程,實現對機器人各個關節的軌跡規劃。
[1]戰茜,屠大維.移動機器人自主抓取作業[J].計算機應用,2016,36(S1):95-98.
[2]祁若龍,周維佳,王鐵軍.一種基于遺傳算法的空間機械臂避障軌跡規劃方法[J].機器人,2014,36(3):263-270.
[3]Bearee R. Olabi A. Dissociated jerk-limited trajectory applied to time-varying vibration reduction[J].Rob Comput Intergr Manuf,2013,29(2):444-453.
[4]趙智勇,王冬青.Dobot機器人運動學分析及建模仿真[J].青島大學學報(工程技術版),2017,32(1):52-57.
[5]劉子貴.基于關節空間工業機器人軌跡規劃的研究與仿真[J].機械工程與自動化,2017,3:59-61.
[6]李小霞,汪木蘭,劉坤等.基于五次B樣條的機械手關節空間平滑軌跡規劃[J].組合機床與自動化加工技術,2012,8:39-42.
[7]趙智勇,王冬青.Dobot機器人運動學分析及建模仿真[J].青島大學學報(工程技術版),2017,32(1)52-57.
[8]Y.-l. Yang, Y.-d. Wei, J.-q. Lou,et al.Nonlinear dynamic analysis and optimal trajectory planning of a high-speed macro-micro manipulator[J].Journal of Sound and Virbration 2017,45:112-132.
[9]張蕾,韋攀東,李鵬飛,等.采用神經網絡算法的多指機械手織物抓取規劃[J].紡織學報,2017,30(1):132-139.
[10]潘磊,錢煒,張志艷,等.四自由度機械臂運動學分析及Matlab仿真[J].機械科學與技術,2013,32(3):421-425.
[11]Saeed B .Niku .Introduction to Robotics[M].BEIJING:Publishing House of Electronics Industry,2013.
[12]孫瑛,程文韜,李公法,等.關節型機器人軌跡規劃算法及軌跡規劃研究現狀[J].長江大學學報(自然版),2016,13(28):32-38.
猜你喜歡
房地產導刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術與機床(2017年3期)2017-06-23 08:11:34
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
