慣性測量系統火箭橇試驗圖像測速方法
2018-01-29 07:09:17魏宗康
導彈與航天運載技術 2017年6期
魏宗康,江 麒,呂 騰
?
慣性測量系統火箭橇試驗圖像測速方法
魏宗康,江 麒,呂 騰
(北京航天控制儀器研究所,北京,100039)
在慣性測量系統火箭橇試驗中,目前主要采用雷達測量設備、遮光板時空測量裝置測量橇體的運行位置和速度。火箭橇點火時,會產生高速度,強尾焰,大噪聲和劇烈振動等外測條件,雷達測量設備、遮光板時空測量裝置無法準確測量火箭橇運行的速度。為滿足未來軌道延長和火箭橇多級點火越來越迫切的需求,提出火箭橇試驗圖像測速方法,彌補上述兩種方法缺陷并提高速度測量的精度。研究了照片反求,特征點提取,速度噪聲的頻譜分析,橇體運行速度的計算值和平滑值,為慣性測量系統火箭橇試驗提供高精度的位置速度變化模型。
火箭橇試驗;圖像測速;照片反求;頻譜分析
0 引 言
火箭橇試驗是利用特殊設計的平臺,搭載試驗件和測試輔助設備,利用推進系統推動平臺沿與地面固連的高精度機械導向滑軌運行,模擬試驗件在啟動、空氣飛行、功能實現等工作剖面的動力學工況環境,通過測試系統獲取試驗環境參數和試驗件的性能參數,并依此開展試驗件性能驗證、評價及失效模式分析工作的一項綜合性試驗技術。該實驗具有產生大過載、高速度、強振動和沖擊等綜合條件的能力,可以最大程度地模擬導彈真實飛行環境。
目前,主要采用雷達測量設備或遮光板時空測量裝置測量橇體的位置和速度。火箭橇軌道逐漸由3 km向9 km甚至16 km發展,采用多級點火的需求越來越迫切。在慣性測量系統火箭橇試驗中,雷達測速對于低速物體測量精度較低,遮光板時空測量裝置會受到尾焰高光影響,均存在不足。因此迫切需要一種新的方法來準確測得火箭橇運行速度。
1 圖像測速原理和設計
照片的數據是由像素點的二維坐標附加顏色值構成,其中像素點的顏色值由紅色、綠色和藍色不同比值構成[1]。利用此幅照片的數據,通過一組顏色值,即可找到滿足這組顏色值的像素點坐標。
照相機拍攝的照片中,物體實際尺寸存在畸變。利用照片反求技術,計算其畸變的關系,然后矯正照片,使其中每個像素點大小代表的實際空間尺寸相同。照相機連續拍攝照片的時間間隔相同,找到一組照片中橇體上特征點的位置變化,組合這些特征點位置變化得到火箭橇位置變化,通過換算即可得到火箭橇橇體的速度變化。
目前,火箭橇試驗場已經架設高速照相機,但只用于觀察發動機點火瞬時橇體分離是否正常等功能監測用途。利用火箭橇試驗場已經架設的高速照相機拍攝照片,結合上述步驟可以得到橇體速度變化,該方法為慣性測量系統火箭橇試驗提供高精度的位置和速度數據。
2 照片反求及矯正
2.1 反求工程
反求工程也稱逆向工程,它的思想最初來自從油泥模型到產品的實物設計過程,隨后發展成一個以先進產品設備的實物、技術軟件(圖紙、程序、技術文件等)或影像(圖片、照片等)為依據的生成幾何模型的方法,它是20世紀80年代后期出現在先進制造領域里的新技術。目前,比較常用的方法有激光掃描法、坐標測量法等。但它們都有不盡如人意的地方,如使用較為廣泛的三坐標測量儀,它需要一定的工作環境,速度慢、效率低且價格昂貴。隨著計算機及光電技術的發展,光學式非接觸測量方法與光學成像法等越來越受到人們的青睞。另外,相對于傳統的手工測繪工藝,利用照片來進行三維反求更有其明顯的優勢,因為它是通過相機拍下來的照片來反求出實體尺寸,可以大大提高設計效率。因而,這方面的研究越來越受到設計人員關注。從工程技術角度來看,反求工程技術包含實物反求、軟件反求和影像反求等3個方面,其中影像反求設計是根據產品的說明書、圖片、照片及廣告介紹等相關參考資料,開展產品設計的一種現代設計方法,照片反求是影像反求中的一種[4~6]。
2.2 照片坐標系定義及轉換
圖1為原始照片像素點坐標系。是以照片左上角為原點、軸垂直向下的右手坐標系;原始照片中心點坐標系1是以照片中心為原點、1軸水平向右的右手坐標系,其中,0為原始照片中縱向邊長的像素個數,0為原始照片中橫向邊長的像素個數。
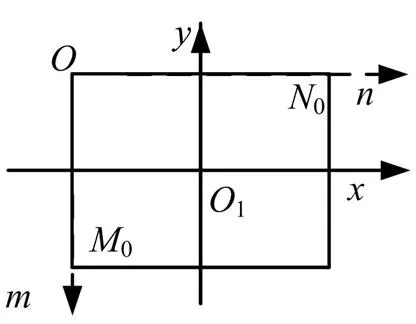
圖1 原始照片坐標系
坐標系和1坐標系的轉換關系為
式中為原始照片中縱向邊長某點的像素個數;為原始照片中橫向邊長的某點像素個數。
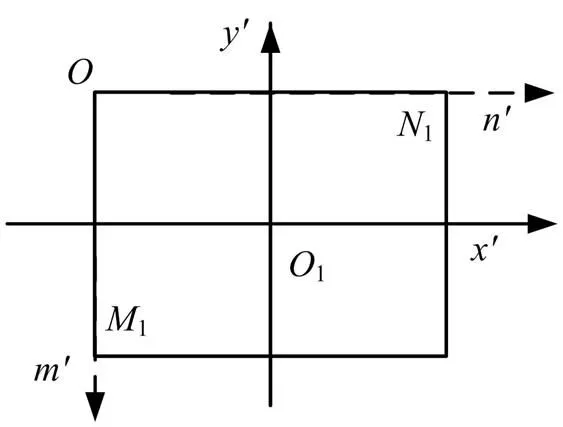
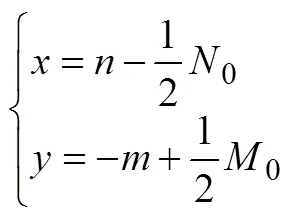
圖2 矯正后照片坐標系
2.3 照片矯正
實物實際尺寸會在照片中發生畸變,通過照片反求得到實物實際尺寸,計算出畸變關系,從而矯正照片。
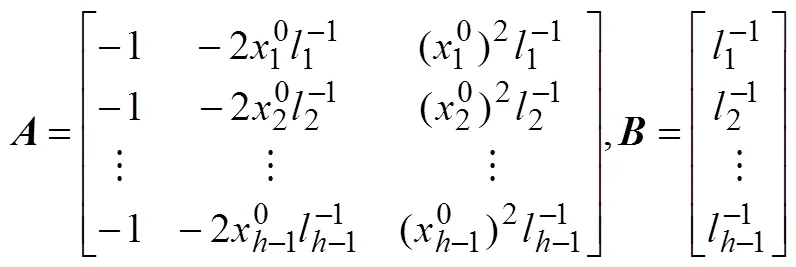
圖3為從左到右依次提取原始照片中扣件在1系的坐標值(pp)(12),其中方框為扣件位置,根據lll用最小二乘法計算系數l和l的值。

圖3 原始照片中扣件位置
計算相鄰兩個扣件的距離和相鄰兩個扣件中心位置坐標(0,q0,q)121;采用最小二乘法計算系數和:
其中,
由上述求得系數、l和l的值,設置1和1,并且矯正原始照片:

3 特征點提取及火箭橇位置變化
在火箭橇運行過程中,尾焰、障礙物、光線等外界因素都會對火箭橇上的特征點顏色值產生影響,因此需要選取合適的特征點才能分析出火箭橇的位置變化。利用上述照片反求和矯正方法,得到矯正后火箭橇照片像素點的單位長度所代表的實際空間距離相等,從而通過觀察矯正后照片火箭橇上特征點的位置變化即可得到火箭橇橇體的位置變化。
3.1 特征點選取
照片實際是由像素點構成,每個像素點有一組二維坐標和顏色值數據。根據像素點顏色值數據,可以在照片數據信息中讀取出像素點位置。
圖4為照片在放大之后得到每個像素點坐標,其中標記為特征點的像素點顏色值與周圍像素點的顏色值差值大。此點的辨識度高并且環境光線對其的影響較小,所以選取此點作為特征點。
圖4 像素點照片
3.2 特征點組合
火箭橇在運行過程中,近似為形狀不變的剛體,所以不同特征點在橇體的坐標關系在每一時刻保持不變。特征點并不能在整個過程保持顏色值不發生顯著變化,最好選取多個特征點組合分析橇體位置變化。圖5為火箭橇點火前示意圖。
圖5 火箭橇點火前示意
如圖5所示,在發動機點火前特征點I和特征點II都可以作為特征點,根據特征點出現時間和障礙物影響,首先使用特征點I,當特征點I被障礙物遮擋時再使用特征點II。圖6為火箭橇點火后示意圖。

圖6 火箭橇點火后示意
如圖6所示,發動機點火后特征點II被尾焰強光完全覆蓋無法識別,這時再一次使用特征點I。
3.3 火箭橇位置變化
根據各個特征點在火箭橇橇體上的坐標關系,不同的特征點位置變化可以組合為火箭橇橇體的位置變化。
從第1幅矯正后的照片開始,等間隔選取幅照片,找到這些照片橇體特征點坐標;同時提取橇體的特征點在此位置的像素值。根據這些等間隔照片確定橇體特征點顏色紅色、綠色、藍色域值范圍以及橇體特征點坐標所在的范圍。
從第1幅矯正后的照片開始,讀取每1幅照片信息,若特征點坐標所在的范圍內,有坐標點滿足橇體特征點紅色、綠色、藍色域值范圍,則確定此坐標點為特征點的位置[2]。
圖7為將不同的特征點位置變化組合得到火箭橇橇體位置變化。
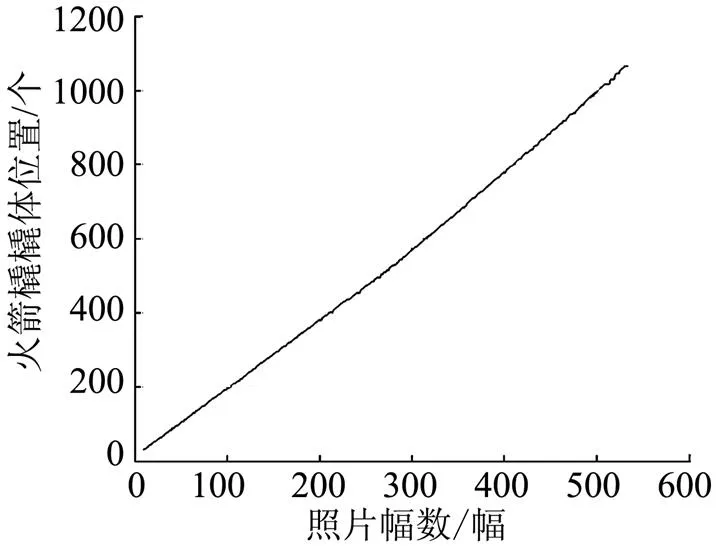
圖7 火箭橇橇體位置變化
4 橇體速度求取和平滑
從第1幅矯正在得到火箭橇橇體位置變化以及上述參數后,求取橇體的瞬時速度[7]:
式中為比例系數;為單個像素點對應的長度;為相機拍攝的頻率;+1和分別表示第+1張照片和第張照片中火箭橇橇體位置的水平方向坐標,1 ≤≤– 1,為照片幅數。
對火箭橇速度噪聲頻譜分析[8],橇體速度噪聲主要頻段為大于10 Hz的高頻段;因此,采用二階低通濾波器對速度進行濾波以消除高頻噪聲[3],如圖8所示。

圖8 火箭橇速度噪聲頻譜分析

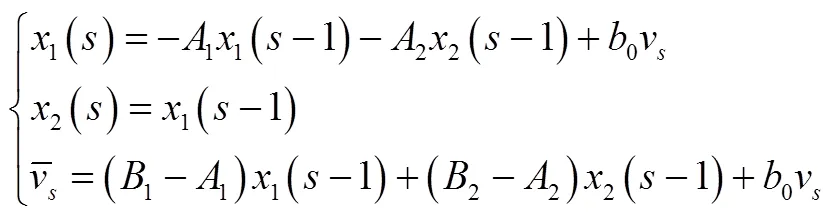
式中0,1,2,1,2為離散化二階低通濾波器的參數[5]。
求取+1時刻s+1,并更新1(-1)和2(-1),重復上述步驟直到=-1時為止,得到速度平滑后的曲線,如圖9所示,可以清晰地看到火箭橇橇體在整個運行過程的速度變化。
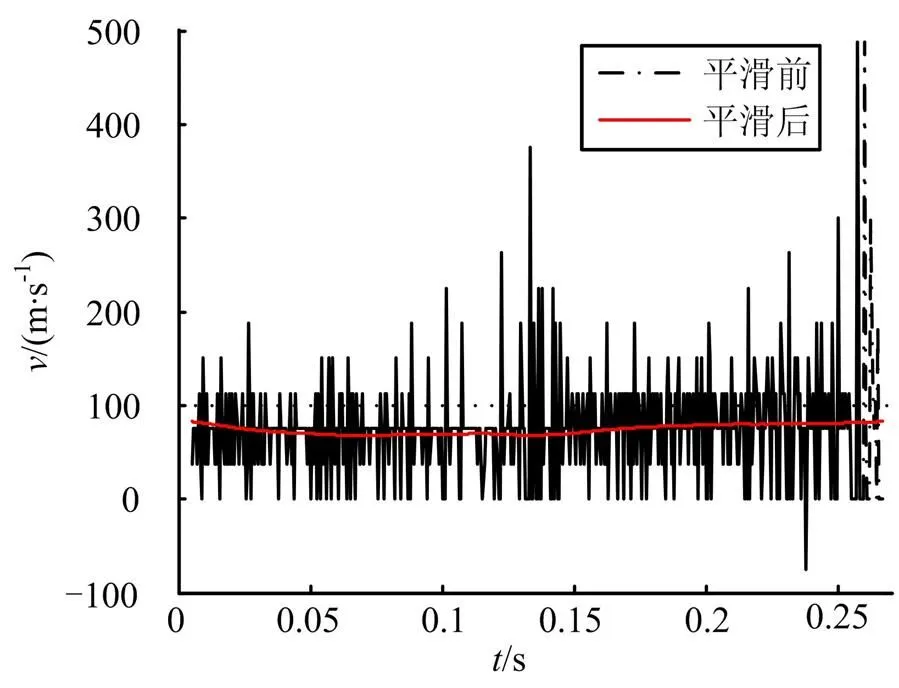
圖9 速度平滑曲線
5 結 論
根據目前火箭橇速度測量的方法以及未來火箭橇發展方向,提出了一種火箭橇試驗圖像測速方法。該方法不受火箭橇速度和尾焰點火高溫高光影響,火箭橇試驗中關鍵時刻的速度測量精度比遮光板時空測量裝置更高,同時成本可控,更加適應于未來延長火箭橇軌道和多級點火的火箭橇試驗。
[1] 張錚, 王艷平, 薛桂香. 數字圖像處理與機器視覺—Visual C++與Matlab實現[M]. 北京: 人民郵電出版社, 2010.
[2] 薛定宇. 控制系統計算機輔助設計—MATLAB語言與應用 (第2版)[M]. 北京: 清華大學出版社, 2006.
[3] 陳東升, 魏宗康. 慣性測量裝置火箭橇試驗模擬導彈飛行過載方法[J]. 導彈與航天運載技術, 2009(4): 10-15.
[4] 聶冬金. 基于照片反求產品原型的研究[D]. 上海: 華東理工大學, 2013.
[5] 夏剛, 魏宗康, 陳東生, 王常虹. 慣性平臺系統火箭橇試驗數據處理方法[J]. 中國慣性技術學報, 2010(2): 5-8.
[6] 栗全慶, 王宏, 張英杰, 趙汝嘉. 實物反求工程的關鍵技術分析[J]. 機械設計, 2000(6): 4-6.
[7] 李國慶. 火箭橇外測系統的研制[D]. 哈爾濱: 哈爾濱工業大學, 2012.
[8] 段宇鵬, 魏宗康, 劉建波, 劉璠. 慣性測量裝置火箭橇試驗外測數據融合方法[J]. 中國慣性技術學報, 2013(1): 25-39.
Velocity Measurement of Photographs on IMU Rocket Sled Testing
Wei Zong-kang, Jiang Qi, Lv Teng
(Beijing Institute of Aerospace Control Devices, Beijing, 100039)
On IMU rocket sled testing, radar and light interrupter are usually used to measure rocket sled testing’s velocity and position. When rocket sled ignites, it produces high velocity, strong tail fire, large noise and vibration.Measurement of radar and light interrupter cannot get accurate velocity of rocket sled. To meet the needs of longer track and multistage ignition, Velocity measurement of photographs can cover the shortage of measurement of radar and light interrupter and improve the precision of rocket sled testing. It includes reversion of photographs, characteristic points extracting, the optimization of characteristic points’ position, frequency spectrum analysisof noises on velocity and velocity calculating and smoothing, it also provides a high precise model of position and velocity on IMU rocket sled testing.
Rocket sled testing; Velocity measurement of photographs; Reversion of photographs; Analysis of frequency spectrum
1004-7182(2017)06-0056-05
10.7654/j.issn.1004-7182.20170613
V448.25+2
A
2016-12-17;
2017-01-19
魏宗康(1973-),男,研究員,主要研究方向為導航、制導與控制
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
當代陜西(2019年10期)2019-06-03 10:12:04
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21