控制性能精確可控的自適應魯棒容錯控制方法研究
2018-02-01 00:46:08,,遠
導航定位與授時 2018年1期
, ,遠
(1. 西北工業大學 航天學院,西安710072;2. 中國科學技術大學 自動化系,合肥 230027)
0 引言
魯棒控制理論通常是以犧牲一定的控制性能為代價換取對干擾及未建模動態的魯棒性,最優控制通常則是以犧牲魯棒性為代價換取控制性能的最優,如何設計一種方法使控制系統能更好地兼顧控制性能和魯棒性是控制領域的一個研究熱點。針對這一問題,本文以容錯控制系統為切入點,將參數空間方法、變結構理論,以及模型參考自適應理論相結合,嘗試給出一種可行的方法,在提高系統對故障診斷誤差魯棒性的同時,又保證具備期望的控制性能。
文中擬將參數空間方法作為內回路,是因為這種魯棒控制方法有一個很好的特點:既可以基于極點配置理論完成適應精確控制性能要求的控制系統設計,又可以基于區域極點配置理論完成適應具有一定魯棒性且控制性能可控的控制系統設計。基于參數空間的容錯控制文獻很多,例如參考文獻[1]針對直接力/氣動力復合控制導彈,采用參數空間方法和變結構控制理論完成了復合控制系統設計。參考文獻[2]基于參數空間法的區域極點配置理論研究了線性離散不確定系統在圓形區域極點約束下的容錯控制問題,類似的還有文獻[3]和文獻[4]。
外回路擬采用變結構+模型參考自適應的方法,主要用來增加控制系統對故障診斷誤差的魯棒性。模型參考自適應的相關文獻很多,例如文獻[5-7]。這類方法的優點是具有較好的魯棒性,但由于完全沒有利用被控對象的模型信息,因此系統性能會受到一定影響。
下面具體介紹如何設計一個內部采用參數空間,外部采用變結構+模型參考自適應方法的自適應魯棒容錯控制系統。
1 自適應魯棒容錯控制系統設計
1.1 基本設計步驟
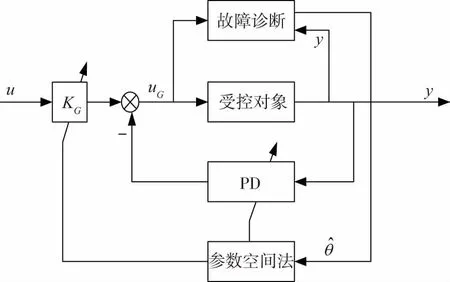
圖1 基于參數空間法的內回路框圖Fig.1 Block diagram of inner loop basedon parameter space method
自適應魯棒容錯控制系統內回路準備采用參數空間容錯方法進行設計,外回路采用變結構+模型參考自適應控制(簡稱為VS-MRAC)進行設計,其框圖分別如圖1和圖2所示。
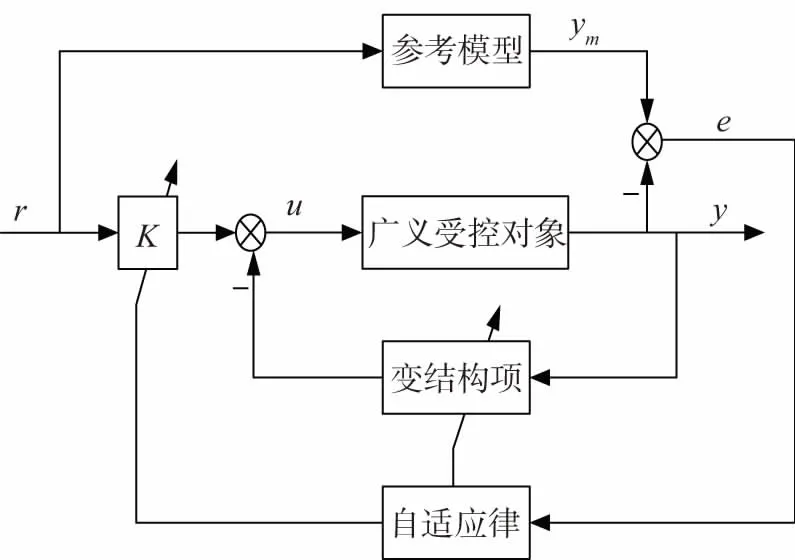
圖2 基于變結構模型參考自適應的外回路框圖Fig.2 Block diagram of outer loop based on variablestructure model reference adaptive
自適應魯棒容錯控制系統基本設計步驟如下:
1)進行故障模式劃分,并建立包括正常模式在內的多模系統;
2)確定不同模式對應的性能指標及在零極點復平面對應的性能區域;
3)基于區域極點配置理論完成圖1對應的內回路設計,給出不同模式對應的控制參數,作為圖1的調參規律;
4)給定圖2所示的參考模型;
5)完成圖2中的控制律形式確定及自適應律的設計。
上面的基本步驟中,步驟1)~3)是圖1對應的參數空間內回路設計,步驟4)~5)是圖2對應的自適應外回路設計。
1.2 參數空間內回路設計與分析
以無人機一側舵面破損故障下的縱向增穩回路設計為例給出具體設計過程,圖3所示為縱向增穩回路框圖。

圖3 無人機縱向增穩回路框圖Fig.3 Block diagram of longitudinal stability loop of UAV
設計步驟如下:
1)建立多模系統
按舵面破損程度,將對象劃分為正常、半損、全損3個模式,對應多模系統表示如下
i=0,1,2
(1)
(2)
2)給出一級品質和二級品質兩種性能區域要求,控制系統應盡量滿足一級品質,最低滿足二級品質。
一級品質為ξ1≤ξ≤1,ω1≤ωn≤ω2。

3)利用網格法將性能區域劃分為若干個點,每個點代表了一組ξ和ωn,利用極點配置理論可以得到每個模式下的參數集合,示意圖如圖4所示。
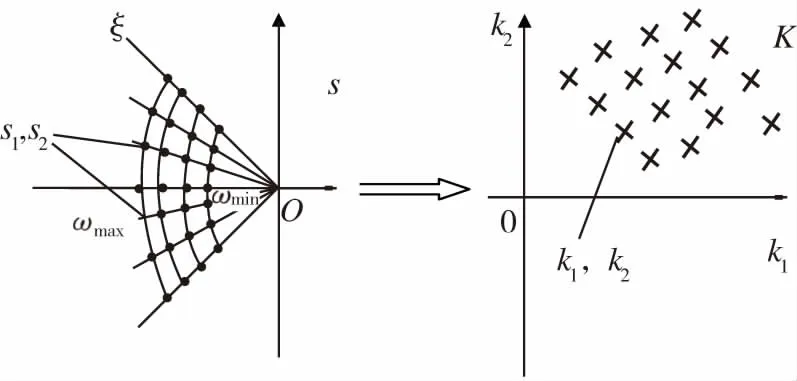
圖4 參數空間示意圖Fig.4 Schematic diagram of parameter space
根據不同模式參數集合的交集情況,選擇合適的控制律。
至此,完成了參數空間內回路的設計。
1.3 自適應控制外回路設計與分析
自適應控制外回路設計步驟如下:
1)選擇參考模型
選擇一級品質中的一組ξ和ωn來確定參考模型的分母,增益則參考正常模式下的閉環增益給出,如下所示
(3)

2)圖2中的控制律設計
廣義受控對象即為圖1所示的閉環控制系統,其傳遞函數如下
(4)

令
(5)
則廣義受控對象可描述為如下的狀態方程

(6)
對式(3)所示的參考模型,令
(7)
則參考模型可描述為如下的狀態方程
(8)
定義誤差向量為
e=x-xm
(9)
對式(9)求導可得誤差系統狀態方程為
(10)
由于可能存在的模型故障,式(10)中的矩陣A和B為不確定參數矩陣,可記為
A=A0+ΔA,B=B0+ΔB
(11)
其中,A0和B0是正常情況的標稱值,由式(4)可知,此時廣義受控對象應該完全逼近式(3)所對應的參考模型,即
A0=Am,B0=Bm
(12)
另外,假設ΔA和ΔB滿足匹配條件
ΔA=B0E,ΔB=B0F
(13)

式(10)給出的誤差系統狀態方程可改寫為
(14)
VS-MRAC的目的是使誤差趨于0,即

(15)
針對誤差系統狀態方程式(14)設計滑模面為
s=Ge
(16)
選擇Lyapunov函數為
(17)

對式(17)求導可得
=eTGTG[Ame-Bmr+Bmu+ΔAx+ΔBu]-
≤eTGTG[Ame-Bmr+Bmu]+
(18)
提出如下控制律
u=ueq+uvs
(19)
式中,ueq=Ke·e+r,e=x-xm


(20)
(21)
至此,完成了自適應控制外回路的設計,也完成了整個復合自適應容錯控制系統的設計。
2 數值仿真
以無人機為例,受控對象相應參數如下:
一級品質為0.7≤ξ≤1,2≤ωn≤2.6。
二級品質為0.3≤ξ≤1,0.4≤ωn≤2.6。
在上面的條件下,可分別得到一級品質下和二級品質下不同故障模式的參數空間如圖5和圖6所示。

圖5 不同故障時一級品質公共控制器參數空間Fig.5 Parameter space of common controller with firstgrade quality for different faults
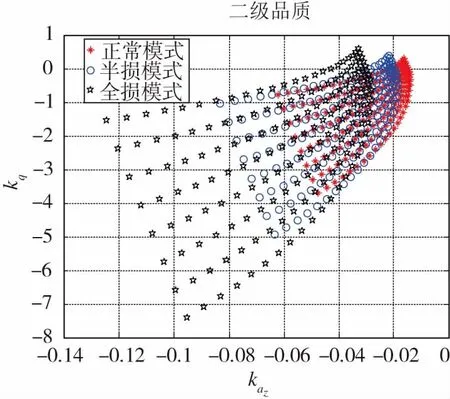
圖6 不同故障時二級品質公共控制器參數空間Fig.6 Parameter space of common controller with secondgrade quality for different faults
分析圖5和圖6可知,不存在使正常、半損和全損三種模式都為一級品質的公共控制器,但是存在一個參數交集,使得正常和半損模型下為一級品質,全損模式為二級品質。此處控制參數選擇如下:
正常及半損故障時,kaz=-0.03,kq=-3。
全損故障時,kaz=-0.06,kq=-3。
此時故障診斷模塊只要能分清正常和全損模式即可。
一級品質中,選擇ξ=0.7和ωn=2.2,與正常模式對應的控制參數一起代入式(3),可得參考模型如下
MRAC中,控制相關的參數如下:
Ke=[4 0],γ1=γ2=0.03,G=[1 0],k=3。
假定無人機處于全損模式,當故障診斷正確時,內回路控制參數為kaz=-0.06,kq=-3,階躍響應如圖7所示,對應自適應控制指令如圖8所示。

圖7 診斷正確時的階躍響應Fig.7 Step response in correct diagnosis
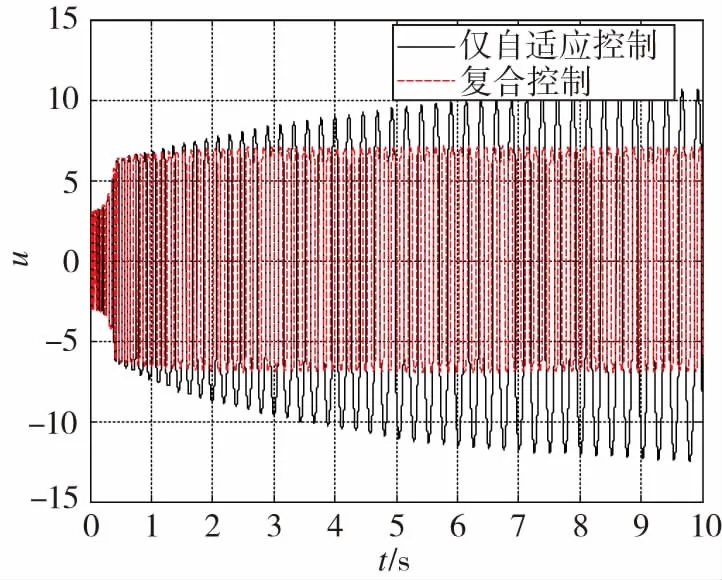
圖8 診斷正確時變結構模型參考自適應控制的控制指令Fig.8 Control command of VS-MRAC in correct diagnosis
從圖7可以看出,故障診斷正確時,單純參數空間法僅能保證性能滿足一級品質,但與參考模型規定的品質仍有差距,復合自適應控制與參考模型輸出基本吻合,單純VS-MRAC性能略差。從圖8可以看出,雖然復合自適應控制與單純VS-MRAC階躍響應基本相同,但從控制指令來看,顯然復合自適應控制從最優的角度來說能量更省。
下面,再考慮診斷存在誤差的情況,無人機仍處于全損模式,故障診斷模塊誤診為半損狀態,此時控制增益選擇kaz=-0.03,kq=-3,階躍響應如圖9所示,對應自適應控制指令如圖10所示。
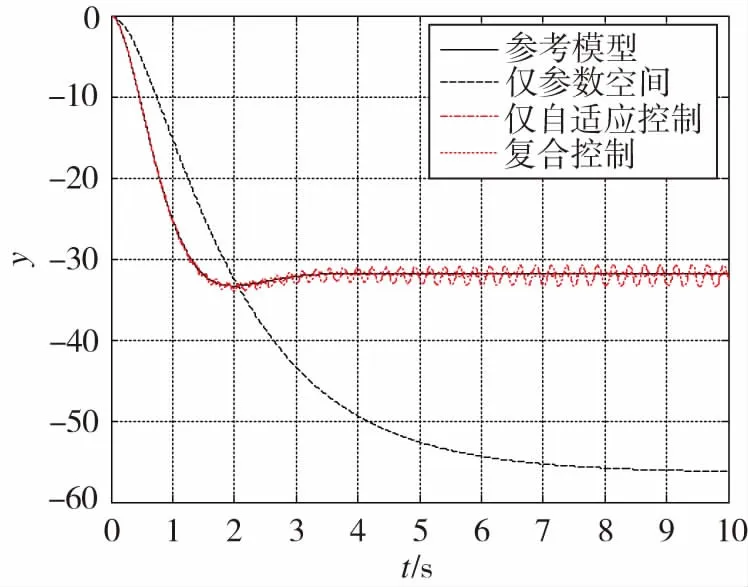
圖9 診斷有誤時的階躍響應Fig.9 Step response with diagnosis error

圖10 診斷有誤時變結構模型參考自適應控制的控制指令Fig.10 Control command of VS-MRAC with diagnosis error
從圖9可以看出,故障診斷有誤差時,復合自適應控制的輸出最接近參考模型輸出,下來是VS-MRAC,單純參數空間方法較差,這與理論是相符的。從圖10可以看出,從能量最省的角度,復合自適應控制要明顯優于單純的VS-MRAC。
3 結論
本文將參數空間方法、變結構理論、以及模型參考自適應理論相結合,給出了一種新的自適應魯棒容錯控制方法,這種方法綜合了參數空間、變結構及模型參考自適應的優點,既能保證對系統控制性能約束的可控性,又能保證對故障診斷誤差的魯棒性,同時控制指令能量遠小于單純變結構控制,是一種最優控制與魯棒控制相結合的嘗試,未來要做的是進一步完善該理論,將其推廣到不同的應用對象。
[1] 朱學平 , 胡曉明, 張曉峰,等. 基于參數空間方法和變結構控制的直接力/氣動力復合控制系統設計[J]. 計算機測量與控制, 2014(1): 288-296.
[2] 張端金, 張洛花, 苗啟. 圓形區域極點配置的Delta算子系統魯棒容錯控制[C]// 第27屆中國控制會議. 昆明, 2008.
[3] 徐峰, 李東海, 薛亞麗,等. 基于區間多項式穩定性理論的PID控制器[J]. 清華大學學報(自然科學版), 2003, 43(12):1642-1645.
[4] 侯玉娟. 不確定連續系統基于區域極點配置的魯棒容錯控制[J]. 渤海大學學報(自然科學版), 2007, 28(3): 245-247.
[5] 吳忠強, 樸春俊. 模型參考自適應控制理論發展綜述[J]. 信息技術, 2000(7):33-35.
[6] 林巖, 毛劍琴. 具有理想跟蹤特性的魯棒變結構模型參考自適應控制[J]. 自動化學報, 1999, 25(2): 191-198.
[7] 熊柯, 夏智勛, 郭振云. 吸氣式高超聲速巡航飛行器飛行攻角的模型參考自適應滑模控制[J]. 航天控制, 2011, 29(2):17-22.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學精密工程(2016年6期)2016-11-07 09:07:19
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
機械與電子(2014年1期)2014-02-28 02:07:31
