三相電壓型PWM整流器的新型雙閉環控制方法
2018-02-08 01:33:14朱志鍵唐衛民
電力工程技術 2018年1期
關鍵詞:控制策略
朱志鍵, 唐衛民
( 國網無錫供電公司, 江蘇 無錫 214000)
0 引言
基于脈沖寬度調制(PWM)技術的三相電壓型整流器能有效減少交流側諧波含量,具有直流側電壓可控、功率因數接近1及能量雙向流動的優點。因此,三相電壓型PWM整流器在工業上得到了越來越廣泛的應用[1]。目前應用廣泛且研究較多的控制策略是dq坐標系下的電壓電流雙閉環控制策略[2]。
傳統雙閉環控制策略的電流環采用前饋解耦控制方法分別控制有功和無功電流, 并用PI控制器作為電流調節器,電壓環用PI控制器直接把直流側電壓和有功電流聯系起來。文獻[3]研究了L、C參數的實用區間和PI參數整定及其對直流側電壓、交流側諧波和功率因數的影響, 提出了一套模范化的設計和整定方式,但整定過程繁瑣,時間成本較大。文獻[4—6]分別介紹了整流器在模塊化多電平換流器(MMC)和電動汽車中的應用。文獻[7-9]基于合成矢量的思想將雙輸入雙輸出模型轉換為單輸入單輸出模型, 使問題得到了簡化。文獻[10]利用將無功電流反饋到有功電流的動態控制中,提升了有功電流的動態響應速度。
因此,參數整定復雜、無抗擾環節以及電壓外環控制粗糙是傳統雙閉環控制器的不足之處。為此,文中研究了基于內模控制的新型雙閉環控制策略。所提的新型控制策略既簡化了控制器參數整定,從新的角度拓展了控制策略, 實現了線性化的間接電壓控制,可同時獲得直流側電壓的快速跟蹤和優良抗擾控制。
1 數學模型
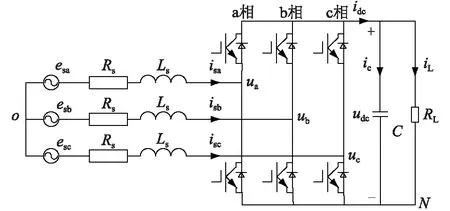
圖1 三相電壓型PWM整流器的拓撲Fig.1 Topology of three-phase VS-PWM rectifier
圖1中,Rs為等效損耗電阻。為便于建模, 定義開關函數sk:
(1)
式中:k=a,b,c,且可知ukN=udcsk。理想對稱時,有:
(2)
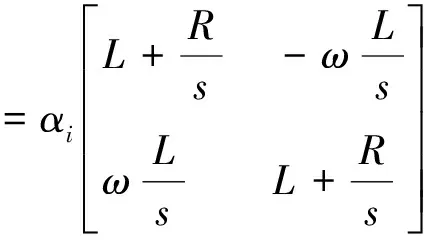
式(2)是對三相VS-PWM模型的精確描述。由此可得dq坐標系下的數學模型為:
(3)
式中:sd和sq是sa,sb,sc的相關函數,可看作dq坐標系中的開關函數。
2 電流環控制
圖2是內模控制(IMC)的經典反饋控制圖[11]。傳統電流環的控制一般采用經典控制理論中的前饋解耦控制[2, 12],其中有功和無功電流的徹底解耦需要精確的整流器模型和參數,而控制器的參數調試過程非常繁瑣且需反復試驗。針對上述問題,文中將內模解耦控制引入到電流環的控制中。
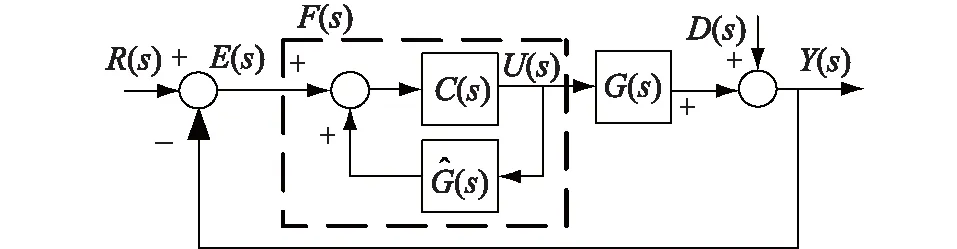
圖2 IMC結構Fig.2 Control block of IMC
Y(s)=G(s)U(s)
(4)
其中:
(5)

(6)
為了增加系統的穩定性和魯棒性, 需要引入低通濾波器[8, 13-14]。因此,低通濾波器L(s)可選為:
(7)
則C(s)為:
(8)
圖2中F(s)為:
(9)
綜上所述,可得電流環的內模解耦控制如圖3所示。
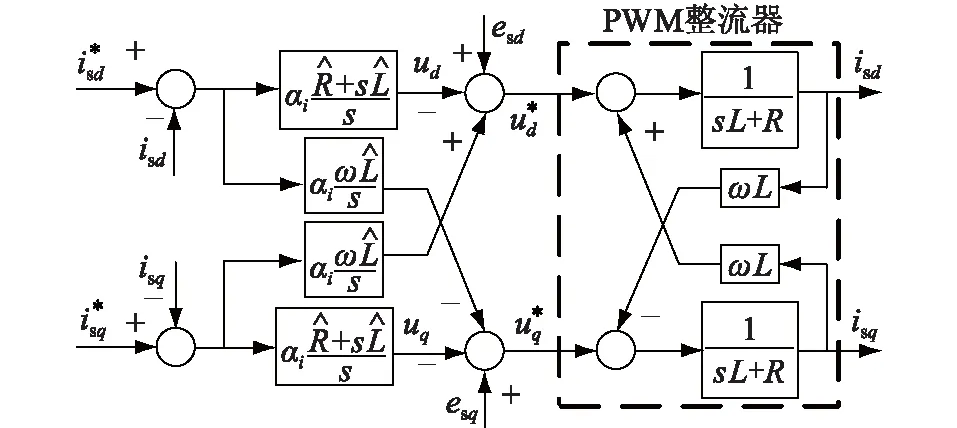
圖3 電流環內模解耦控制Fig.3 Decoupling control block with IMC of current loop
由圖3可知,電流內環的內模解耦控制只需調試αi。鑒于一階系統帶寬與階躍響應上升時間的近似關系為τ=2.2/αi[13]。因此,αi越大,在一定程度上電流環的跟蹤響應也會越快。
由圖2可得傳遞函數為:
(10)
(11)
3 電壓環控制
3.1 二自由度IMC
三相VS-PWM電壓環的控制目標是實現DC電壓的快速跟蹤和優良抗擾控制。同樣地,電壓環的控制器也可采用IMC設計,但卻無法獲得較好的抗擾性。為此,引入文獻[15]中所采用的二自由度IMC來解決此問題,如圖4所示。C1(s)和C2(s)構成了二自由度內模控制器,其中C1(s)控制系統的跟隨特性,C2(s)控制系統的抗擾特性。
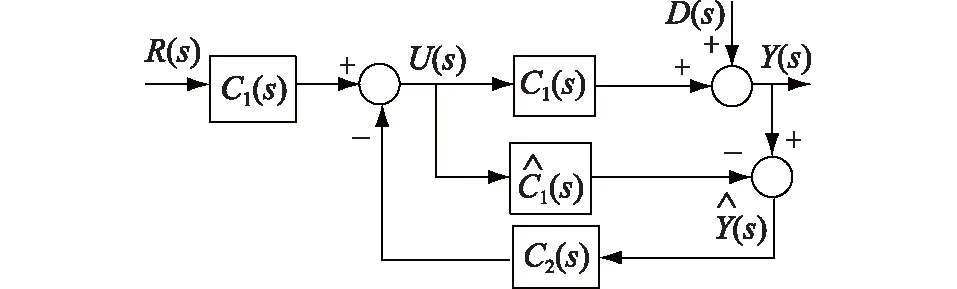
圖4 二自由度IMCFig.4 Two-degrees-of-freedom IMC
圖4為二自由度IMC,由圖4可得:

(12)
(13)

3.2 二自由度線性抗擾控制
由式(3)可知,isdsd和isqsq是兩個典型的非線性變量, 傳統電壓環直接用PI控制器把DC電壓和有功電流聯系起來, 并沒有考慮模型的線性問題。文中在充分考慮線性控制的基礎上提出了基于功率守恒的二自由度內模線性抗擾控制。
忽略等效損耗電阻Rs所引起的損耗,則三相交流側輸出的有功功率Pac和直流側的有功損耗Pdc相平衡, 即Pac=Pdc。為便于控制器的設計,采用dq坐標系下的有功和無功功率表達式。如下所示:
(14)
直流側有功功率為:
(15)
聯立式(14)和式(15), 有
(16)

(17)

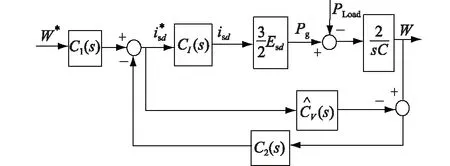
圖5 電壓環二自由度內模抗擾線性控制Fig.5 Disturbance-rejection linear control of voltage loop with two-degrees-of-freedom IMC
電流環系統參數與模型參數完全匹配時,由圖5和式(11)有:
(18)

考慮到內模控制器的可實現性,低通濾波器L1(s)和L2(s)可取為:
(19)
(20)
故內模控制器C1(s)和C2(s)分別為:

(21)
(22)
根據式(13),當模型精確匹配時,有:
(23)
由式(23)可知,系統的跟蹤控制和抗擾性可通過分別調節αV1和αV2來調節,在調節的過程中相互之間并不影響。因此,可根據跟隨性能指標要求確定αV1,再根據抗擾性的要求確定αV2,以使獲得優良的跟隨性和抗擾性。
鑒于三相電壓型PWM整流器常運行于單位功率因數, 即q軸參考電流為0, 則可建立如圖6所示的新型雙閉環控制框圖。

圖6 基于IMC的雙閉環控制Fig.6 Control block of the double closed loop based on IMC
4 仿真與分析
為了驗證所提出的內模控制策略的正確性和可行性, 在MATLAB/SIMULINK下搭建了仿真平臺。仿真所采用參數為:交流側線電壓RMS為380 V;交流側電感L=6 mH;交流側電阻Rs=0.1 Ω;直流側電容C=6000 μF;直流參考電壓為700 V;直流側負載為100 Ω;主電路開關頻率為10 kHz;電流環帶寬為2000 Hz。
穩態仿真結果如圖7所示, 其中(a)圖為A相輸入電壓(10%)和輸入電流波形圖, 圖中輸出電流和輸入電壓幾乎完全同步, 功率因數接近1。(b)圖對應DC側輸出電壓波形, 其超調小, 調節時間短, 并快速穩定于給定值700 V。圖(c)為無功電流波形, 其值在零參考值附近震蕩, 振幅小于1, 表明其平均無功功率為0, 即功率因數為1。

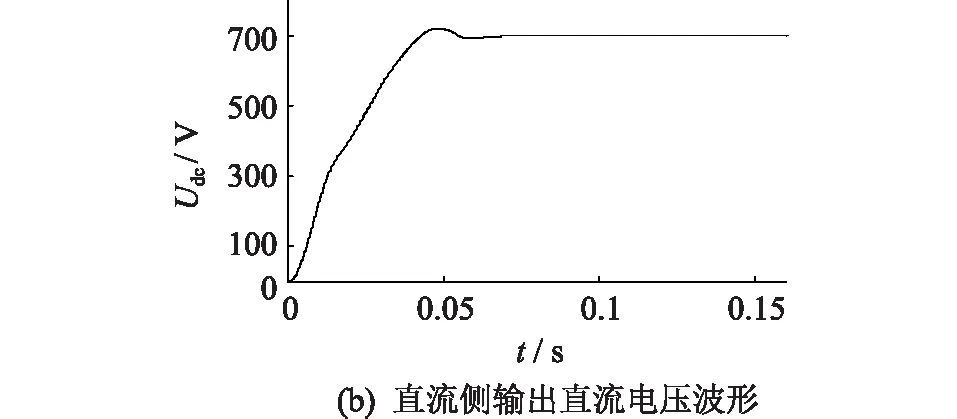
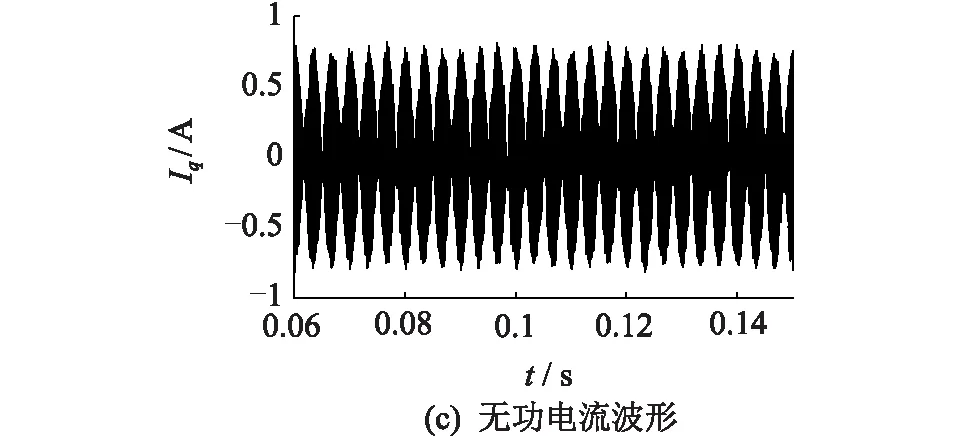
圖7 PWM整流器穩態波形Fig.7 Waveforms of PWM rectifier in steady state
跟蹤控制和抗擾控制的仿真結果如圖8所示。0.2 s時負載由100 Ω變為20 Ω。分析比較圖8中的4種情況, 可知在αV1不變的情況下改變αV2,輸出電壓響應曲線的跟蹤特性不變,而抗擾特性隨αV2的減小而變好;在αV2不變的情況下改變αV1,輸出電壓曲線的抗擾特性不變,而跟蹤特性隨αV1的減小而變好。

圖8 PWM整流器輸出電壓波形Fig.8 The comparison of rapid elimination of disturbance
仿真結果表明,系統的跟隨控制和抗擾控制可通過分別調節αV1和αV2來控制:僅調整αV1的參數值,可調節整流器輸出電壓的跟蹤特性而不影響抗擾特性;同樣的,僅調整αV2的參數值,可調節整流器輸出電壓的抗擾特性而不影響跟蹤特性。另外,對于αV1和αV2,較小的參數值均可獲得更優良的性能。實際情況下αV1和αV2的參數值可依據成本和性能折中選擇。
5 結語
文中在詳細分析內模控制的基礎上, 提出了二自由度內模控制策略。新型雙閉環控制策略既簡化了控制器參數整定且從新的角度拓展了控制策略, 又實現了線性化的間接電壓控制且可同時獲得直流側電壓的快速跟蹤和優良抗擾控制。仿真結果表明:整流器輸出電壓的跟隨控制和抗擾控制可獨立調節,對于文中濾波器表達式下的αV1和αV2,較小的參數值可獲得更優良的性能。
[1] ZHANG X, MI C C, YIN C. Active-charging based power train control in series hybrid electric vehicles for efficiency improvement and battery lifetime extension [J]. Journal of Power Sources, 2014, 245: 292-300.
[2] BLASKO V, KAURA V. A new mathematical model and control of a three-phase AC-DC voltage source converter [J]. Power Electronics, IEEE Transactions on, 1997, 12(1): 116-123.
[3] 汪萬偉, 尹華杰, 管 霖. 雙閉環矢量控制的電壓型PWM整流器參數整定[J]. 電工技術學報, 2010, 25(2): 67-72.
WANG Wanwei, YIN Huajie, GUAN Lin. Parameter setting for double closed-loop vector control of voltage source PWM rectifier [J]. Transactions of China Electrotechnical Society, 2010, 25(2): 67-72.
[4] 王 靚, 任洪強, 陳國宇, 等. 基于 MMC 的三相四線制電能質量補償裝置[J]. 江蘇電機工程.
WANG Liang, REN Hongqiang, CHEN Guoyu, et al. A compensation device of power quality in three-phase four-wire system based on modular multi-level inverter [J]. Electric Power Engineering Technology, 2016, 35(1):57-60.
[5] 薛鐘兵, 彭 程. 新能源發電與電動汽車充換儲站協調運行研究[J]. 江蘇電機工程, 2014 (5): 36-38.
XUE Zhongbing, PENG Cheng. Research on the coordinated operation of new energy power generation and EV charging storage station [J]. Electric Power Engineering Technology, 2014 (5): 36-38.
[6] 許曉慧, 陳麗娟, 張 浩, 等. 規模化電動汽車與電網互動的方案設想[J]. 江蘇電機工程, 2012, 31(2): 53-55.
XU Xiaohui, CHEN Lijuan, ZHANG Hao, et al. Conceptual design of interaction between large-scale electric vehicles and grid[J]. Electric Power Engineering Technology, 2012, 31(2): 53-55.
[7] YIN B, ORUGANTI R, PANDA S K, et al. A simple single input-single-output (SISO) model for a three-phase PWM rectifier [J]. IEEE Transactions on Power Electronics, 2009, 24(3): 620-631.
[8] 陳耀軍, 鐘炎平. 基于合成矢量的電壓型PWM整流器電流控制研究[J]. 中國電機工程學報, 2006, 26(2): 143-148.
CHEN Yaojun, ZHONG Yanping. Study on the current control for voltage-source PWM rectifier using complex vectors [J] . Proceedings of the CSEE, 2006, 26(2): 52-56.
[9] BRIZ F, DEGNER M W, LORENZ R D. Analysis and design of current regulators using complex vectors [J]. IEEE Transactions on Industrial Applications, 2000, 36(3): 817-825.
[10] 鐘炎平, 沈頌華. PWM整流器的一種快速電流控制方法[J]. 中國電機工程學報, 2005, 25(12): 52-56.
ZHONG Yanping, SHEN Songhua. A fast current control scheme for PWM rectifier [J]. Proceedings of the CSEE, 2005, 25(12): 52-56.
[11] 朱志鍵, 王 杰. 三相電壓型PWM整流器的二自由度內模控制[J]. 電網與清潔能源, 2015, 31(11):1-6.
ZHU Zhijian, WANG Jie. Two-degrees-of-freedom internal model control of the three-phase voltage-sourced PWM rectifier [J]. Power System and Clean Energy, 2015, 31(11):1-6.
[12] 張崇巍, 張 興. PWM整流器及其控制[M]. 北京: 機械工業出版社, 2003.
[13] OTTERSTRN R. On control of back-to-back converters and sensorless induction machine drives [M]. Chalmers University of Technology, 2003.
[14] 宋文祥, 尹 赟. 一種基于內模控制的三相電壓型 PWM 整流器控制方法[J]. 電工技術學報, 2012, 27(12): 94-101.
SONG Wenxiang, YIN Yun. A control method of three-phase voltage type PWM rectifier based on internal model control [J].Journal of Electric Technology, 2012, 27(12):94-101.
[15] 周淵深, 朱希榮. 改進型二自由度內模控制及其應用研究[C]∥2009 中國控制與決策會議論文集 (2):2009.
ZHOU Yuanshen, ZHU Xirong. Improved two degree of freedom internal model control and its application [C]∥2009. Papers Collection on Control and Decision Making of China(2):2009.
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36