基于單周控制的四橋臂APF矢量模式研究
2018-02-08 01:33:19譚風雷吳興泉
電力工程技術 2018年1期
譚風雷, 朱 超, 吳興泉
(國網江蘇省電力有限公司檢修分公司,江蘇 南京 211106)
0 引言
電力有源濾波器(active power filter, APF)作為諧波補償裝置,能夠補償電網中的無功和諧波,提高電能質量,減少線路損耗,有利于電能的充分利用。作為諧波補償裝置,如何提高補償效果是APF的關鍵。一般可以從兩個方面提高補償效果:改進控制算法和采用多電平變換器。三電平APF相對傳統兩電平可以增加輸出電壓的電平數,改善輸出電流的波形。目前電網中單相負載較多,從而使得電網出現不平衡現象,因此三相四線制系統的應用成為必然。單周控制[1-5]能在一個周期內消除穩態和瞬態誤差,響應速度較快,抗干擾能力強,魯棒性好,而且可以減少電壓和電流傳感器,降低成本,有較好的研究價值和應用前景。
目前三電平APF單周控制方法研究較少。文獻[6]給出了三電平三相三橋臂單周控制傳統模式,文獻[7]提出了三電平三相四橋臂單周控制傳統模式,它們采用單周控制傳統模式,所有的橋臂時刻工作于高頻開關狀態,使得開關損耗較大。文獻[8]和[9]分別提出了兩種三電平三相三橋臂單周控制矢量模式,并通過仿真和實驗驗證了理論的正確性。文獻[10]提出了三電平三相四橋臂有源電力濾波器矢量模式單周控制策略,本文在充分研究其思想的基礎上,提出了另外兩種基于單周控制的三電平四橋臂APF矢量模式。
首先分析了三電平四橋臂變換器拓撲結構和等效數學模型,然后根據文獻[11]闡述的三電平單周控制矢量模式,電容電壓可以自動實現均衡原理。借助文獻[12]提出的三電平四橋臂APF的絕對開關狀態表,提出了兩種三電平四橋臂單周控制矢量模式,并詳細給出了工作原理和控制目標方程的推導過程。最后在軟件PSIM 9.0中搭建仿真模型,驗證兩種矢量模式的正確性和有效性。
1 三電平四橋臂變換器等效數學模型
圖1是三電平四橋臂變換器的拓撲結構圖,該拓撲由4個三電平橋臂構成,每個橋臂有4個功率開關和6個二極管,形成了3種開關狀態,具體的開關狀態定義如下:
當Sx1和Sx2導通,Sx3和Sx4關斷時,記為Sx=P,對應的占空比為dxp;
當Sx2和Sx3導通,Sx1和Sx4關斷時,記為Sx=O,對應的占空比為dx;
當Sx3和Sx4導通,Sx1和Sx2關斷時,記為Sx=N,對應的占空比為dxn;
其中,x=a,b,c,n。
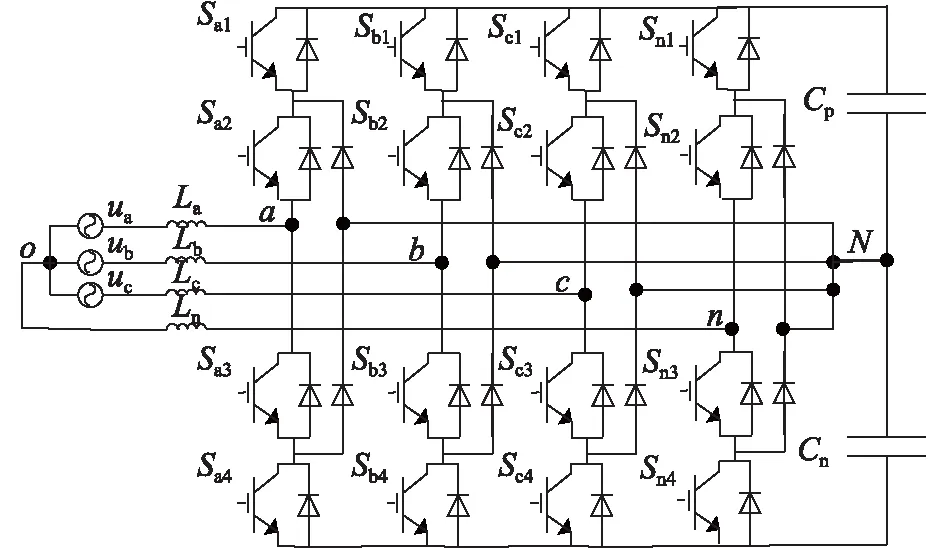
圖1 三電平四橋臂變換器的拓撲結構Fig.1 Topology of three-level four-leg inverter
根據三電平四橋臂的拓撲結構,結合基爾霍夫電壓定律可得:
(1)
考慮到a、b、c三相電壓對稱,同時n相電壓為零,即:
(2)
將表達式(1)中四式相加,并結合表達式(2)可得:
UNo=-0.25(UaN+UbN+UcN+UnN)
(3)
將表達式(3)帶入表達式(1)中可以得到三電平四橋臂變換器的等效數學模型:
(4)
2 三電平四橋臂APF單周控制矢量模式
三電平三相四橋臂APF控制的關鍵是直流側電容電壓的均衡。文獻[10]分析了基于單周控制的三電平APF矢量模式電容電壓可以自動實現平衡,因此三電平三相四橋臂APF單周控制矢量模式無需考慮額外的電容電壓均衡算法。文中設定Up為電容Cp兩端電壓,Un為電容Cn兩端電壓,E為直流側電壓的一半,則Up=Un=E。
三電平三相四橋臂APF單周控制矢量模式[13-15]的難點在于:針對n相電壓為零,但存在P、O和N 3種開關狀態,如何選擇n相的開關狀態是控制的關鍵。文獻[11]提出了三電平三相四橋臂APF絕對開關狀態的選擇方法,借助該方法可以根據a、b、c的開關狀態選擇n相的開關狀態,表1給出了三電平三相四橋臂APF絕對開關狀態。

表1 三電平四橋臂APF絕對開關狀態Tab. 1 Absolute switch status ofthree-level four-leg APF
文獻[12]借助文獻[10]三電平APF單周控制矢量模式電容電壓可以自動實現平衡和文獻[11]三電平三相四橋臂APF絕對開關狀態,提出了三電平三相四橋臂APF矢量模式單周控制策略,通過仿真和實驗驗證了理論的正確性。本文借助文獻[12]的思想,提出了另外兩種基于單周控制的三電平四橋臂APF矢量模式。
2.1 矢量模式一
基于單周控制的三電平四橋臂APF矢量模式采用30°劃分區間[12],即將一個工頻周期劃分為12個30°區間,如圖2所示。

圖2 三相電壓區間劃分Fig.2 Three-phase voltage interval division
當a相電壓位于0°~30°時,b相電壓絕對值最大,且為負值,文中設定b相橋臂的開關狀態Sb=N,即占空比dbn=1。分析表1可知,當b相橋臂的開關狀態Sb=N時,只剩下8種絕對開關狀態,如表2所示,此時n相橋臂工作于Sn=O或N兩種狀態。同時由于c相電壓大于a相電壓,文中設定c相橋臂工作于Sc=P或O,即占空比dcn=0,設定a相橋臂工作于Sa=O或N,即占空比dap=0。

表2 Sb=N時對應的絕對開關狀態Tab. 2 Absolute switch status when Sa=N
假設APF工作于連續導電模式,則可以得到:
(5)
將表達式(5)代入表達式(4)可得:
(6)
同理可以得到30°~60°區間,120°~180°區間,240°~300°區間的控制目標方程。
當a相電壓位于60°~90°時,a相電壓值最大,文中設定a相橋臂的開關狀態Sa=P,此時占空比dap=1。分析表1可知,當a相橋臂的開關狀態Sa=P時,也只剩下8種絕對開關狀態,如表3所示,此時n相橋臂工作于Sn=P或O兩種狀態。由于c相電壓大于b相電壓,文中設定c相橋臂工作于Sc=P或O,即占空比dcn=0,設定b相橋臂工作于Sb=O或N,即占空比dbp=0。

表3 Sa=P時對應的絕對開關狀態Tab. 3 Absolute switch status when Sa=P
根據圖1可以得到輸出電壓與占空比的關系:
(7)
將表達式(7)代入表達式(4)可得:
(8)
同理可以得到90°~120°區間,180°~240°區間,300°~360°區間的控制目標方程。
根據表達式(6)和(8)可知,整個系統的控制目標方程可以統一成表達式(6)的形式,對其求逆矩陣,整理可得簡化后的控制目標方程:
(9)
APF的作用是補償電網中無功和諧波成分[16-18],使得電網電壓與電網電流同相位,因此APF和非線性負載可以等效為一個純電阻,則:
(10)
式中:Rs為等效的電阻負載。
將式(10)代入式(9)可得系統的控制目標方程:
(11)
其中,表達式(11)的相關參數如表4所示。

表4 矢量模式一控制目標方程的相關參數Tab. 4 Relevant parameters of the controltarget equation for the first vector mode
2.2 矢量模式二
矢量模式二與矢量模式一推導過程相同,只是橋臂的工作狀態不同。當a相電壓位于0°~30°時,a、b和n橋臂的工作狀態保持不變,與矢量模式一相同,c相橋臂工作狀態從Sc=P或O變為Sc=P或N,推導過程保持不變。當a相電壓位于60°~90°時,a、c和n橋臂的工作狀態保持不變,b相橋臂工作狀態從Sb=O或N變為Sb=P或N,推導過程一致。其他區間橋臂工作狀態的定義和推導過程類似于矢量模式一,這里不再重復敘述。最后,可以得到矢量模式二的控制目標方程:
(12)
其中,表達式(12)的相關參數如表5所示。
3 仿真分析
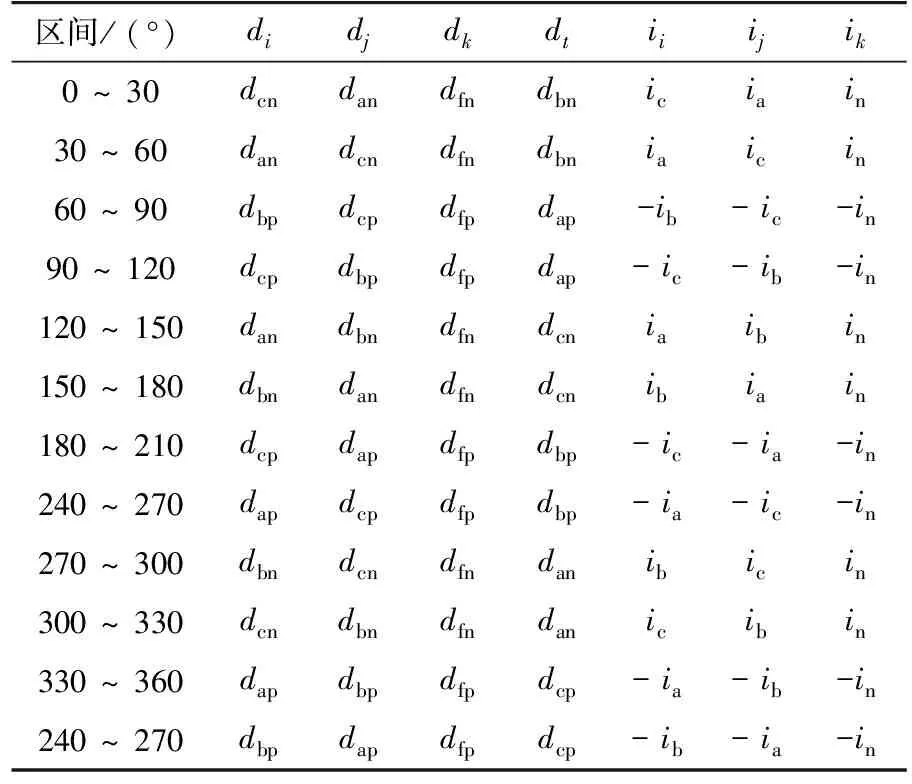
表5 矢量模式二控制目標方程的相關參數Tab. 5 Relevant parameters of the controltarget equation for the second vector mode
為了驗證所提出的兩種基于單周控制的三電平四橋臂矢量模式的正確性,在PSIM 9.0中搭建仿真模型,對其進行仿真研究。為了對比分析,文中給出了文獻[12]所提出的三電平三相四橋臂矢量模式單周控制策略仿真結果,并將該矢量模式稱為矢量模式三。仿真中非線性負載為三相不控整流橋,a、n相接阻感性負載R2L2,仿真參數如表6所示。

表6 模型的仿真參數Tab. 6 Circuit parameters
圖3是APF補償前仿真波形,圖4、5和6是模式一、二和三補償后電源電流ia,ib,ic和in波形。

圖3 補償前仿真結果Fig.3 Simulation results before compensation

圖4 矢量模式一仿真結果Fig.4 Simulation results of the first vector mode

圖5 矢量模式二仿真結果Fig.5 Simulation results of the second vector mode

圖6 矢量模式三仿真結果Fig.6 Simulation results of the third vector mode
補償后電流高度正弦化,畸變率顯著降低,特別是零線電流明顯減少,其中矢量模式二補償效果最好,補償后三相電源電流波形畸變率最小,零線電流波動最小,幅值不到3 A。根據以上的仿真結果表明:所提出的基于單周控制的三電平四橋臂APF矢量模式的正確性和有效性。
4 結語
提出的兩種三電平四橋臂APF單周控制矢量模式可以自動實現直流側電容電壓的均衡控制。兩種模式可以有效減少電壓和電流傳感器的數量,降低成本,同時補償電網諧波效果較好,能夠有效降低 APF的開關損耗。 其中單周控制矢量模式二補償效果最好,補償后三相電源電流波形畸變小,同時零線電流波動小,具有良好的推廣、應用前景。
[1] QIAO Chongming, JIN Taotao, SMEDLEY M K. One cycle control of three phase active power filter with vector operation[J]. IEEE Transactions on Industrial Electronics, 2004, 51(2): 455-463.
[2] QIAO Chongming, SMEDLEY M K. Three-phase bipolar mode active power filters[J]. IEEE Transactions on Industry Applications, 2002, 38 (1): 149 -158.
[3] 孫 蓉, 袁曉東, 周宇浩, 等. 有源濾波器電流預測滯環控制[J]. 江蘇電機工程, 2015, 34(5): 54-58.
SUN Rong, YUAN Xiaodong, ZHOU Yuhao, et al. Based on current predict of active power filter hysteresis control [J]. Jiangsu Electrical Engineering, 2015, 34(5): 54-58.
[4] 韓學棟, 王海華. 基于遺傳算法的有源電力濾波器直流母線電壓控制[J]. 江蘇電機工程, 2014, 33(1): 14-17.
HAN Xuedong, WANG Haihua. DC bus voltage control for active power filter based on genetic algorithm [J]. Jiangsu Electrical Engineering, 2014, 33(1): 14-17.
[5] 譚風雷, 苗振林. 基于重復控制優化的單周控制電流反饋模式[J]. 電器與能效管理技術, 2014(13): 54-58.
TAN Fenglei, MIAO Zhenlin. Current feedback mode of one-cycle control based on repetitive control [J]. Electrical & Energy Management Technology, 2014(13): 54-58.
[6] 周 林, 周 莉. 基于單周控制的三電平三相三線制APF[J]. 高電壓技術, 2005, 31(11): 35-38.
ZHOU Lin, ZHOU Li. Three-level three-phase three-wire active power filter with one-cycle control [J]. High Voltage Engineering, 2005, 31(11): 35-38.
[7] 萬蘊杰, 周 林, 汪立文, 等. 單周控制三電平三相四橋臂APF研究[J]. 高電壓技術, 2007, 33(10): 197-202.
WAN Yunjie, ZHOU Lin, WANG Liwen. Study on one-cycle control three-level three-phase four-leg active power filter[J].High Voltage Engineering, 2007, 33(10): 197-202.
[8] 陳 兵, 謝運祥, 宋靜嫻. 矢量模式單周控制三相三線制三電平有源電力濾波器[J]. 電力自動化設備, 2008, 28(6): 6-10.
CHEN Bing, XIE Yunxiang, SONG Jingxian. Three-phase three-wire three-level APF based on vector mode one-cycle control[J]. Electric Power Automation Equipment, 2008, 28(6): 6-10.
[9] 陳 兵, 謝運祥, 宋靜嫻. 30°~390°矢量模式單周控制三相三線制三電平APF[J]. 電力系統自動化, 2007, 31(21): 76-80.
CHEN Bing, XIE Yunxiang, SONG Jingxian. Three-phase three-wire three-level APF based on vector mode one-cycle control during 30°~390°[J]. Automation of Electric Power Systems, 2007, 31(21): 76-80.
[10] 陳 兵, 謝運祥. 新型三電平三相四橋臂APF矢量模式單周控制策略[J]. 電力自動化設備, 2010, 30(7): 74-79.
CHEN Bing, XIE Yunxiang. Vector mode one-cycle control strategy of three-level three-phase four-leg APF[J]. Electric Power Automation Equipment, 2010, 30(7): 74-79.
[11] QIAO Chongming, SMEDLEY M K. General three phase PFC controller for rectifiers with a series-connected dual-boost topology[J]. IEEE Transactions on Industry Applications, 2002, 38 (1): 137-148.
[12] 樂 健, 姜齊榮, 韓英鐸. 一種新型的四橋臂三電平并聯有源電力濾波器的空間矢量控制策略[J]. 中國電機工程學報, 2006, 26(14): 59-65.
LE Jian, JIANG Qirong, HAN Yingduo. A novel space vector control of four-leg three-level shunt active power filter[J]. Proceedings of the CSEE, 2006, 26(14): 59-65.
[13] 譚風雷, 苗振林. 棄用中矢量三電平SVPWM矢量控制系統研究[J]. 微特電機, 2014, 42(12): 74-77.
TAN Fenglei, MIAO Zhenlin. Vector control system based on three-level SVPWM with medium vectors being eliminated [J]. Small & Special Electrical Machines, 2014, 42(12): 74-77.
[14] 梁營玉,劉建政,許杏桃,等. 基于電源電流和負載電流檢測的前饋加反饋的三相四線制 APF 控制策略[J]. 電力自動化設備, 2015, 35(1): 94-100.
LIANG Yingyu, LIU Jianzheng, XU Xingtao, et al. Feed forward feedback control strategy based on detection of power current and load current for three-phase four-wire APF[J]. Electric Power Automation Equipment, 2015, 35(1): 94-100.
[15] 張 曉, 孫傳達, 劉 娟, 等. 三相四線制有源電力濾波器開路故障診斷[J]. 電網技術, 2016, 40(2): 571-578.
ZHANG Xiao, SUN Chuanda, LIU Juan, et al. Open-circuit fault diagnosis in three-phase four-wire active power filters[J]. Power System Technology, 2016, 40(2): 571-578.
[16] 譚風雷. 三電平兩橋臂有源電力濾波器單周控制策略[J]. 電器與能效管理技術, 2014(12): 53-57.
TAN Fenglei.One-cycle control strategy of three-level two-leg active power filter [J]. Electrical & Energy Management Technology, 2014(12): 53-57.
[17] 錢長遠, 汪良坤, 趙 燕, 等. 有源濾波器在6脈中頻爐諧波治理中的應用[J]. 江蘇電機工程, 2013, 32(5): 19-22.
QIAN Changyuan, WANG Liangkun, ZHAO Yan, et al. The application of APF in harmonic control of the 6-pulse IF furnace [J]. Jiangsu Electrical Engineering, 2013, 32(5): 19-22.
[18] 韓學棟,王海華. 基于遺傳算法的有源電力濾波器直流母線電壓控制[J]. 江蘇電機工程,2014,33(1):14-17.
HAN Xuedong, WANG Haihua. APF DC bus voltage control based on genetic algorithm[J]. Jiangsu Electrical Engineering,2014,33(1):14-17.