氣動軟體機器人執行器的控制與研究
2018-02-18 10:31:06呂澤良黃超雷陳正泉
裝備制造技術 2018年11期
呂澤良,黃超雷,陳正泉
(長安大學工程機械學院,陜西 西安710064)
0 引言
機器人的使用已經成為工業生產和生活中不可或缺的產品,傳統意義上的機器人主要是以剛性結構為主,但是其剛性結構材料導致它無法適應復雜環境的變化,這也使得它自身存在一些體型龐大,安全性低等缺點。
基于軟體機器人的優越性,國內外研制出多種類型的軟體機器人。Tufts大學Barry A.Trimmer實驗室研制的仿毛蟲軟體機器人,其結構是基于3D打印機,采用SMA作為制動器的機器人[1]。美國MIT的RUS課題組運用FEA作為魚尾,研制出一款軟體機器魚,將能源-驅動-控制一體化,可以實現該機器人在水中的自由游動[2]。而在國內也有一些軟體機器人研究成果,例如,浙江大學研究團隊所研制的基于SMA驅動的放生蚯蚓[3],還有哈爾濱工業大學制作的自主導向機器人,同樣是利用SMA作為驅動器[4]。
目前軟體機器人的驅動控制多采用常見的氣動控制,相比其他驅動方式,氣動驅動更加穩定,也相比容易控制。本文設計一種氣動控制軟體機器人,通過設計給執行器空腔的充放氣時間來實現執行器的周期性變化,研究了在不同氣壓下,該執行器的變形程度。
1 氣動軟體機器人執行器結構設計
氣動軟體機器人執行器是使用Ecoflex00-30硅橡膠復合材料作為原始材料,按照體積比混合1A:1B,注入基于3D打印技術制作的模型中,靜置一段時間之后固化的模塊化膠體,結構如圖1所示,軟體機器人模塊執行器截面圖如圖2所示。
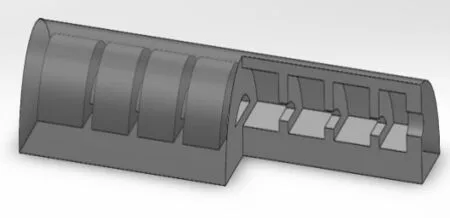
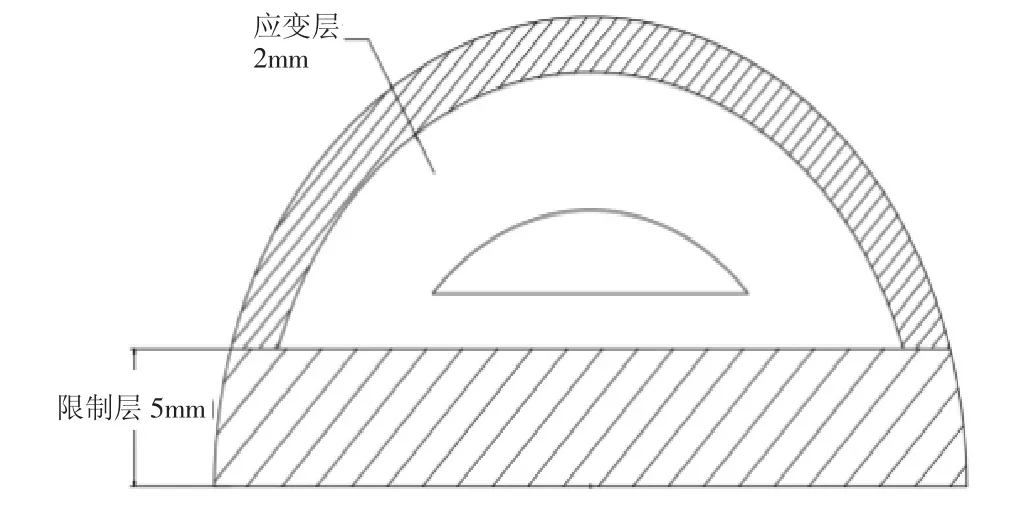
圖2 軟體機器人模塊執行器截面圖
如圖2所示,整個軟體機器人執行器內部有一個空腔,這個空腔貫穿整個執行器內部,上端為2 mm半圓形薄壁,屬于應變層,底部為5 mm厚的限制層,截面處留有直徑為5 mm的氣孔,與實驗設備的氣管相連接。通過給空腔中充放氣可以實現該軟體組織的彎曲動作,彎曲角度可以達到90°.
2 軟體機器人執行器的建模分析
在Solidworks繪圖軟件建立所設計執行器模型,并保存為.x_t文件,用于在ABAQUS軟件中進行有限元分析,模擬仿真其動作。執行器的制備材料是Ecoflex00-30橡膠材料,屬于超彈性材料,因此選用Ogden模型進行建模型分析,在ABAQUS中設置E-coflex00-30材料特性參數[5]。并且按照分析步驟依次設置,其中設定負載時,從1 kPa開始,間隔1 kPa逐漸增大,通過分析運算,觀察模型在隨著壓強的不斷增大,執行器彎曲狀況并不理想,其徑向變形比較明顯,如圖3所示。為了限制軸向膨脹使其彎曲效果更加理想,故該執行器空腔中內壁上設計成帶有內脊的空腔,更好的限制徑向變形。優化之后的的彎曲效果明顯比之前的要好,執行器在3 kPa的壓強之下的彎曲狀況如圖4所示。

圖3 不同氣壓下模塊執行器變形
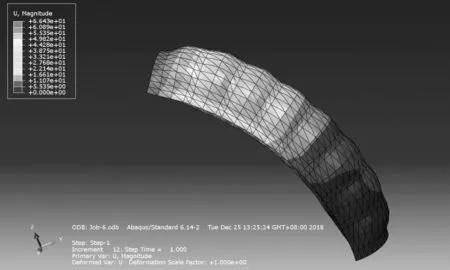
圖4 3kPa下模塊執行器變形
3 氣動控制系統的搭建
氣動軟體機器人的驅動控制采用閉環控制系統,通過上位機控制界面的控制命令發送到控制電路板上,然后控制電路板輸出PWM信號來實現該機器人的彎曲運動,其中通過氣壓傳感器的檢測到的氣壓值輸送回電路板中,根據編寫好的程序完成相應的運動動作,達到其設計目的,控制系統原理圖如圖5.
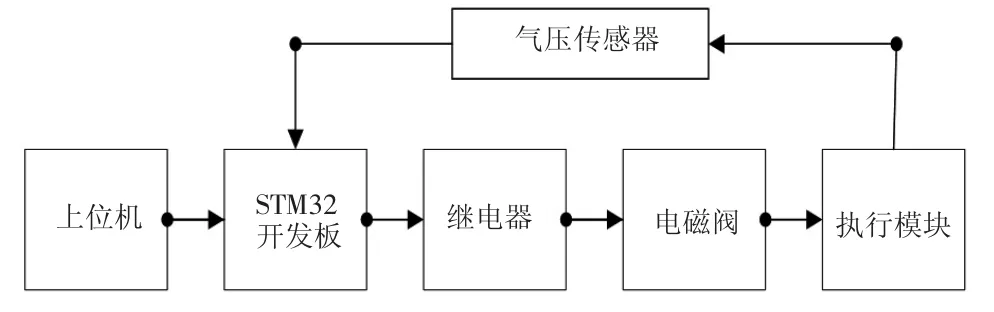
圖5 控制系統原理圖
為了實現對軟體機器人模塊執行器的控制,系統硬件部分主要有:上位機、STM32單片機、空壓機、繼電器、二位三通電磁閥、二位二通電磁閥、氣壓傳感器。空壓機是OUTSANDING充氣無油靜音氣泵,繼電器采用Risym 8路繼電器,電磁閥則采用常見的規格的直動式電磁閥,其中二位三通電磁閥的型號是3V1-06電磁閥,二位二通電磁閥的型號是2V025-06,氣壓傳感器是用的CFSensor的XGZP6847010KPG氣體壓力變動器模塊。控制流程如圖6所示。
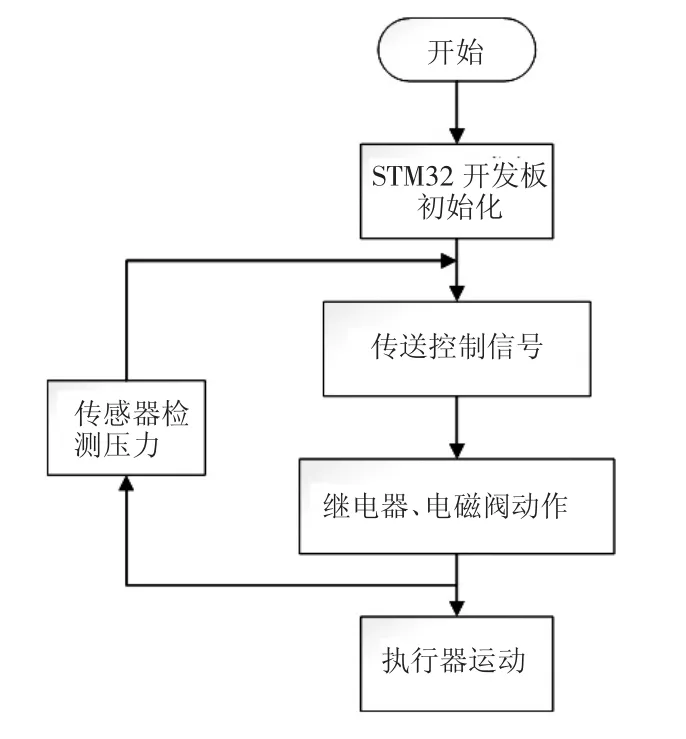
圖6 STM32開發板控制流程圖
為了實現對軟體機器人執行器的控制,STM32開發板接受上位機的控制命令和接收氣壓傳感器返回的數據,實現對繼電器和電磁閥的控制,從而實現對軟體機器人執行器的運動的控制,氣動單路控制原理圖如圖7所示。本文采用低電平觸發模式的繼電器,電磁閥則是用常見規格的直動式電磁閥來實現對氣體的控制。通過設計氣動控制平臺來實現對軟體機器人執行器的控制,在氣動控制平臺的基礎上,通過控制執行器空腔充氣、氣壓保持、放氣的時間,可以實現該執行器的彎曲動作。開始時氣壓為零,給執行器中充氣,當氣壓達到5 kPa時,停止充氣,氣體保持,執行器偏轉角度最大,氣壓大小通過傳感器檢測傳回控制板進行控制,測定不同氣壓之下的偏轉角度。

圖7 氣動單路控制原理圖
實現執行器的控制所需的軟件設計主要有上位機與操作者的人機交互操作界面設計、上位機控制系統設計和STM32開發板對氣動控制平臺的控制系統程序設計。人機交互操作界面主要是實現人與上位機的直接性的操作控制,上位機控制系統設計通過USART串口通信給開發板傳輸控制信號,開發板對氣動控制平臺的控制是利用芯片中編譯好的程序以及上位機發送的信號,控制繼電器和電磁閥的動作,最終實現對軟體機器人模塊執行器的運動方式的控制。
基于Labview來設計界面,實現STM32控制板的與PC機的指令傳達,從而控制繼電器模塊的通斷,實現對電磁閥的控制,從而實現軟體執行器中氣體的充放過程。軟體執行器控制界面如圖8所示。
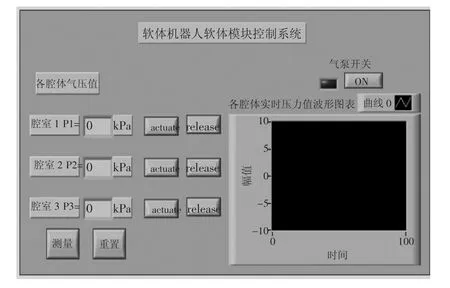
圖8 軟體執行器控制界面
4 實驗結果
按以上設計,搭建的實驗控制臺如圖9所示。
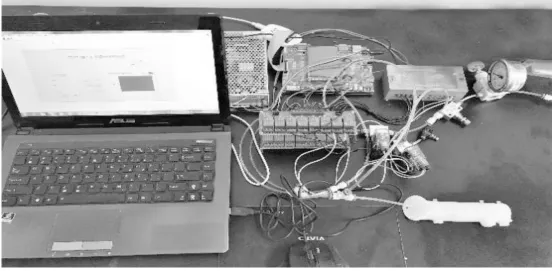
圖9 實驗控制臺
軟體執行器的彎曲角度大小與所沖入空腔的壓強有正相關的關系,隨著壓強的不斷增大,執行器的彎曲角度也不斷增大。如圖10所示,將軟體執行器垂直固定在角度板上。通入氣體,軟體執行器彎曲角度為其自由端在彎曲平面內轉過的角度,即軟體執行器充氣之后與未充氣執行器其軸線所成的夾角α.
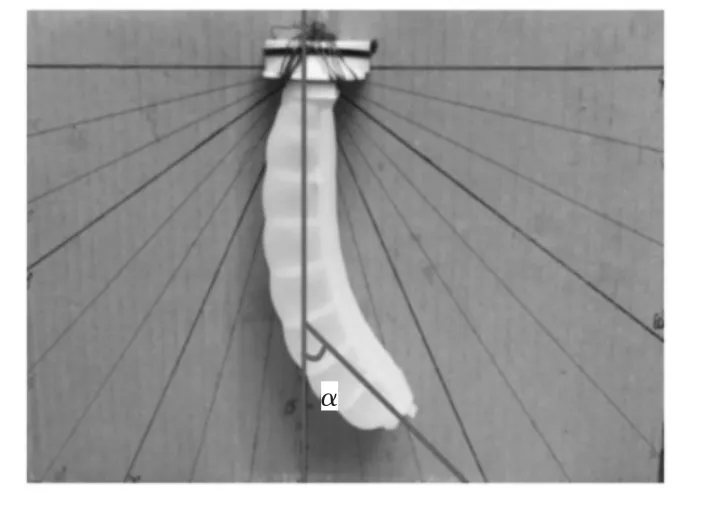
圖10 執行器彎曲角度示意圖
借助空氣壓縮機提供壓力,控制節流閥的開關大小,輸入氣壓從小逐漸增大,當往軟體執行器中通入壓力氣體的時候,軟體執行器產生彎曲運動,記錄彎曲角度和壓強的關系。其彎曲角度和壓強的關系為圖11所示,當執行器中的壓強越大,其彎曲角度也更大,彎曲速率也更大,也就是說軟體執行器對越高的壓強更加敏感,在氣壓達到4 kPa的時候,軟體執行器膨脹到幾乎極限,繼續增壓,軟體執行器可能輝損壞,因此該4 kPa是目前執行器所能承受的最大壓強,實驗證明該執行器可以實現多角度的彎曲變形。
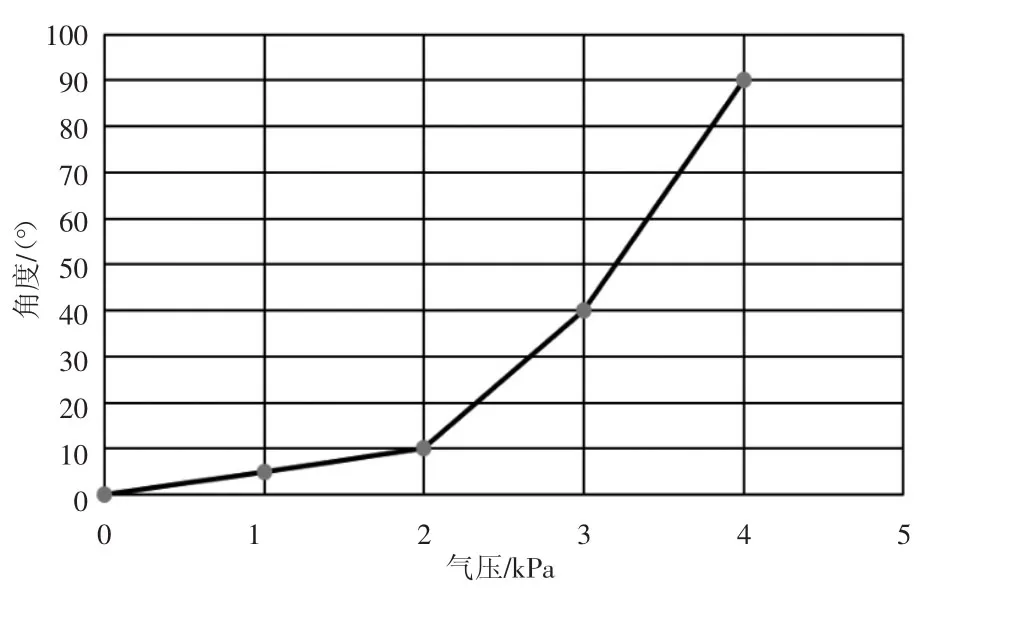
圖11 執行器彎曲角度和壓強的關系
5 結束語
本文研制了一種氣壓驅動的單腔室軟體執行器,其上方是變形層,下方是限制層,兩者設計厚度不一,實現彎曲變形。首先通過有限元分析軟件模擬了執行器的變形狀況,對執行器進行了優化處理,接著搭建氣動控制平臺,給執行器空腔中充入不同壓強的氣體實現其不同角度的彎曲,實驗表明可以實現預期效果,證明執行器的彎曲可行性。本人是對軟體機器人的基礎探索,但目前該技術還是起步階段,尚未形成成熟的理論和工藝流程,在數學建模,力學分析,制造加工,電子控制等方面還有更加廣闊的應用前景。