基于雙足機(jī)器人步態(tài)規(guī)劃與運(yùn)動學(xué)仿真
2018-02-26 07:53:50韓金伯
電子技術(shù)與軟件工程 2018年15期
關(guān)鍵詞:人工智能
韓金伯
摘要
隨著科學(xué)技術(shù)在人工智能領(lǐng)域的不斷發(fā)展,對雙足機(jī)器人的研究逐漸深入,由于數(shù)學(xué)描述方面的難度較大,對機(jī)器人運(yùn)動分析中存在較大困難,因此本文構(gòu)建了機(jī)器人運(yùn)動學(xué)模型,使其能夠在ZMP判據(jù)基礎(chǔ)上,對機(jī)器人的前向運(yùn)動步態(tài)進(jìn)行規(guī)劃,并且通過對三次樣條差值法的應(yīng)用,展示機(jī)器人關(guān)節(jié)的運(yùn)動軌跡.基于此,本文首先構(gòu)建了雙足機(jī)器人的運(yùn)動學(xué)模型,然后對機(jī)器人的步態(tài)規(guī)劃進(jìn)行分析,最后對其仿真運(yùn)動加以闡述。
【關(guān)鍵詞】人工智能 雙足機(jī)器人 步態(tài)規(guī)劃運(yùn)動學(xué)仿真
與以往輪式、履帶式機(jī)器人相比來看,雙足機(jī)器人在越障方面的能力較強(qiáng),移動盲區(qū)相比較小,并且具有重量輕、體積小、靈活性強(qiáng)等特征,與人類步行特征相類似,對復(fù)雜環(huán)境的適應(yīng)性較強(qiáng)。在實際應(yīng)用過程中,雙足機(jī)器人可適用于放射性、危險性較強(qiáng),高強(qiáng)度、長時間的單調(diào)作業(yè)當(dāng)中。步態(tài)規(guī)劃有利于提升幾人的穩(wěn)定行走能力,因此對此方面進(jìn)行研究具有十分重要的現(xiàn)實意義。
1 雙足機(jī)器人運(yùn)動學(xué)模型構(gòu)建
通過對國內(nèi)外雙足機(jī)器人自由度的分析,與人體中關(guān)節(jié)自由度相結(jié)合后,設(shè)計了10個自由度機(jī)構(gòu),分別為兩個髖關(guān)節(jié)、兩個踝關(guān)節(jié)、一個膝關(guān)節(jié)。在踝關(guān)節(jié)與髖關(guān)節(jié)的兩個自由度中,一個是負(fù)責(zé)前向運(yùn)動,另一個負(fù)責(zé)側(cè)向運(yùn)動;而膝關(guān)節(jié)中的一個自由度只是負(fù)責(zé)前向運(yùn)動。
在本文所設(shè)計的雙足機(jī)器人中,10個自由度均為可轉(zhuǎn)動關(guān)節(jié),利用D-H法構(gòu)建齊次坐標(biāo)系,將機(jī)器人的各個關(guān)節(jié)都分別以坐標(biāo)系的方式表現(xiàn)出來,其中,機(jī)器人右腳中心的坐標(biāo)系O0-X0Y0Z0為參考坐標(biāo)系,軀干中心坐標(biāo)系為O6-X6HY6Z6,左腳中心的坐標(biāo)系為O12-X12Y12Z12,后兩者為虛擬坐標(biāo)系,為計算結(jié)果提供輔助和參考。
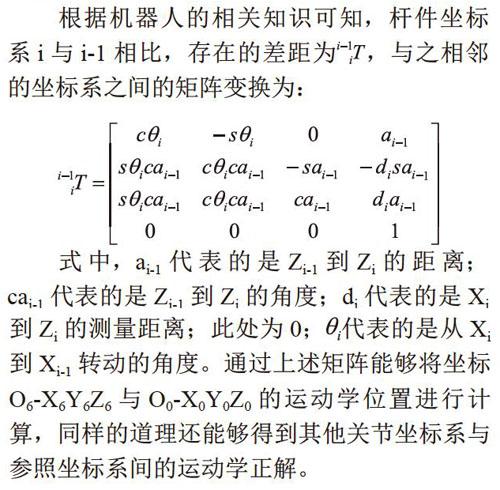
根據(jù)機(jī)器人的相關(guān)知識可知,桿件坐標(biāo)系i與i-1相比,存在的差距為ii-1T,與之相鄰的坐標(biāo)系之間的矩陣變換為:
式中,ai-1代表的是Zi-1到Zi的距離;cai-1代表的是Zi-1到Zi的角度;di代表的是Xi到Zi的測量距離;此處為0;θi代表的是從Xi到Xi-1轉(zhuǎn)動的角度。通過上述矩陣能夠?qū)⒆鴺?biāo)O6-X6Y6Z6與O0-X0Y0Z0的運(yùn)動學(xué)位置進(jìn)行計算,同樣的道理還能夠得到其他關(guān)節(jié)坐標(biāo)系與參照坐標(biāo)系間的運(yùn)動學(xué)正解。
2 步態(tài)規(guī)劃
在機(jī)器人步行運(yùn)動的過程中,身體的各個部位在空間和時序上存在較強(qiáng)的協(xié)調(diào)性,這便是步態(tài)。對步態(tài)進(jìn)行規(guī)劃屬于機(jī)器人研究中十分關(guān)鍵的內(nèi)容,能夠?qū)C(jī)器人行走的穩(wěn)定性起到直接影響。通常情況下,采用ZMP判據(jù)的方式,共計分為兩步,首先按照兩足步行機(jī)器人的運(yùn)動要求,對部分關(guān)節(jié)的運(yùn)動情況進(jìn)行規(guī)劃,其次按照雙足機(jī)器人動態(tài)平衡關(guān)系,對剩余關(guān)節(jié)的運(yùn)動進(jìn)行明確,以此來通過系統(tǒng)實現(xiàn)動態(tài)協(xié)調(diào)運(yùn)動。
通過具體的實驗研究結(jié)果表明,雙足機(jī)器人在運(yùn)動中,前向關(guān)節(jié)與側(cè)向關(guān)節(jié)的耦合較小,甚至可以忽略不計,對前向與側(cè)向運(yùn)動進(jìn)行分別建模。本文主要研究機(jī)器人運(yùn)動中前向步態(tài)規(guī)劃問題。當(dāng)機(jī)器人在向前方行走時,主要需要利用到四個側(cè)向關(guān)節(jié)以及六個前向關(guān)節(jié)來實現(xiàn),側(cè)向關(guān)節(jié)能夠轉(zhuǎn)移機(jī)構(gòu)中心,前向關(guān)節(jié)能夠促使機(jī)器向前行走。具體的行走運(yùn)動流程為右腿支撐、左腳抬起、右腿放下、重心左移、右腿抬起、放下等,具體分為8個階段。
在對機(jī)器人雙腿關(guān)機(jī)進(jìn)行定義時,θ1代表的是右腿;θ2代表的是左腿,θ3代表的是右腿從下到上的偏轉(zhuǎn)角度;θ4代表的左腿從上到下的偏轉(zhuǎn)角度。在前向運(yùn)動中,由θ2、θ3、θ4運(yùn)動實現(xiàn)。在求解之前,假設(shè)側(cè)向關(guān)節(jié)不發(fā)生變化,也就是四個側(cè)向關(guān)節(jié)的偏轉(zhuǎn)角度值均為0,則在求解運(yùn)動方程時,便能夠繪制出一個關(guān)節(jié)隨著時間變化而發(fā)生改變的曲線圖,進(jìn)而獲得運(yùn)動學(xué)軌跡。
在對人類正常平面行走步態(tài)進(jìn)行分析后,與雙足機(jī)器人步行規(guī)律特征相結(jié)合,按照行走過程的條件明確髖關(guān)節(jié)與踝關(guān)節(jié)運(yùn)動受力的關(guān)鍵點(diǎn)。通過三次樣條插值方式,對關(guān)鍵點(diǎn)進(jìn)行插值處理,并且與五次多項式進(jìn)行擬合之后,獲得兩個關(guān)節(jié)的平滑軌跡,進(jìn)而獲得其他關(guān)節(jié)的軌跡。
3 運(yùn)動仿真
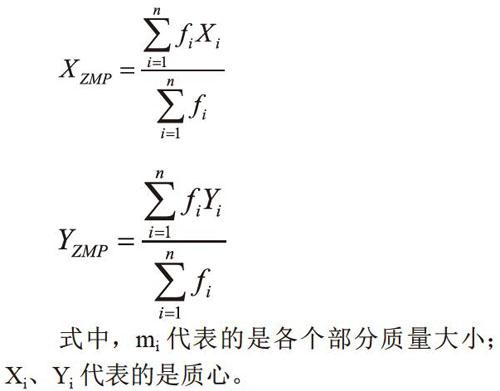
雙足機(jī)器人雖然有諸多優(yōu)勢,但是也存在諸多技術(shù)難關(guān),存在多變量、強(qiáng)耦合、高階等特性,這些特性導(dǎo)致機(jī)器人的運(yùn)動仿真難度增加,規(guī)劃運(yùn)動與實際運(yùn)動二者存在一定的差距。因此,在對雙足機(jī)器人運(yùn)動模擬中,首先將ZMP概念引入其中,將其當(dāng)做動態(tài)行走穩(wěn)定性分析的評判標(biāo)準(zhǔn)。所謂的ZMP主要是指在機(jī)器人步行運(yùn)動時,所支撐受力的關(guān)鍵點(diǎn)中,圍繞著這一點(diǎn)上的合力力矩為0,同時也可以看做是機(jī)器人在地面反力的影響下,將力量垂直分量后對該點(diǎn)產(chǎn)生的合力矩數(shù)值為0。在步態(tài)規(guī)劃的過程中,利用ZMP依據(jù)作為判定的標(biāo)準(zhǔn),對機(jī)器人的ZMP地面投影進(jìn)行規(guī)劃,使其能夠始終處于穩(wěn)定的支撐區(qū)域當(dāng)中,ZMP的計算公式為:
式中,mi代表的是各個部分質(zhì)量大小;Xi、Yi代表的是質(zhì)心。
借助Matlab軟件中的工具箱,構(gòu)建機(jī)器人二維仿真模型,將步態(tài)規(guī)劃中選中的關(guān)節(jié)數(shù)據(jù)輸入其中,對其進(jìn)行運(yùn)動學(xué)的仿真分析,進(jìn)而得出機(jī)器人單腿支撐向前行走過程中,在平面中各個關(guān)節(jié)位置、角度、加速度的變化情況,并且繪制出速度變化的曲線圖,對曲線圖進(jìn)行分析之后,判斷步態(tài)是否合理。在Simulink軟件中構(gòu)建雙足機(jī)器人的二維仿真模型,從仿真結(jié)果能夠看出所設(shè)計的步態(tài)規(guī)劃結(jié)果較為合理,雙足機(jī)器人能夠滿足預(yù)期的運(yùn)動標(biāo)準(zhǔn),步態(tài)具有較強(qiáng)的科學(xué)性與合理性。
4 結(jié)束語
綜上所述,通過對國內(nèi)外雙足機(jī)器人自由度的分析,與人體中關(guān)節(jié)自由度相結(jié)合后,設(shè)計了10個自由度機(jī)構(gòu),利用D-H法構(gòu)建齊次坐標(biāo)系,將機(jī)器人的各個關(guān)節(jié)都分別以坐標(biāo)系的方式表現(xiàn)出來。在人類行走姿態(tài)的基礎(chǔ)上,對重點(diǎn)姿態(tài)點(diǎn)進(jìn)行分析,并且運(yùn)動三次樣條插值方式,對髖關(guān)節(jié)與踝關(guān)節(jié)的平滑軌跡進(jìn)行計算,與運(yùn)動學(xué)知識相結(jié)合后,繪制出膝關(guān)節(jié)的軌跡。
參考文獻(xiàn)
[1]楊先娜.基于動力學(xué)建模的雙足機(jī)器人步態(tài)規(guī)劃研究[D].北京科技大學(xué),2015.
[2]李曉慧.雙足機(jī)器人步態(tài)規(guī)劃及動態(tài)穩(wěn)定性研究[D].東北大學(xué),2016.
猜你喜歡
西安航空學(xué)院學(xué)報(2022年2期)2022-07-04 07:45:42
汽車零部件(2020年3期)2020-03-27 05:30:20
表面工程與再制造(2019年1期)2019-05-11 08:52:04
商界(2019年12期)2019-01-03 06:59:05
家庭影院技術(shù)(2018年9期)2018-11-02 05:31:34
IT經(jīng)理世界(2018年20期)2018-10-24 02:38:24
通信電源技術(shù)(2018年3期)2018-06-26 06:33:30
軍營文化天地(2018年1期)2018-02-10 05:19:25
小康(2017年16期)2017-06-07 09:00:59
學(xué)與玩(2017年12期)2017-02-16 06:51:12
