圓盤式磁流變液制動器的設(shè)計(jì)與磁場仿真
2018-03-01 08:39:18張玉魯李兆松
汽車工程學(xué)報 2018年1期
關(guān)鍵詞:有限元設(shè)計(jì)
張玉魯,李兆松,梁 彬
(山東科技大學(xué) 機(jī)械電子工程學(xué)院,山東,青島 266590)
常見的汽車制動器有摩擦式和非摩擦式兩種,目前汽車上用的絕大多數(shù)為摩擦式制動器。摩擦式制動器按結(jié)構(gòu)形式來分主要有鼓式制動器和盤式制動器。盤式制動器在制動過程中,產(chǎn)生大量的熱經(jīng)過制動盤散到空氣中,導(dǎo)致盤體產(chǎn)生熱應(yīng)力和熱膨脹,進(jìn)而制動失效引發(fā)交通事故。隨著智能化的快速發(fā)展,汽車制動系統(tǒng)在功能改善的同時,其結(jié)構(gòu)和管路的布置更加復(fù)雜,流體泄露的可能性增大。在這種情況下,MRF制動器應(yīng)運(yùn)而生。目前,國內(nèi)外對MRF 制動器的研究僅限于理論,而本文提出了多盤式MRF制動器的結(jié)構(gòu)設(shè)計(jì)和磁路設(shè)計(jì)方法,并且對所設(shè)計(jì)的制動器進(jìn)行仿真和試驗(yàn)驗(yàn)證。
1 MRF制動器參數(shù)設(shè)計(jì)
1.1 盤式MRF制動器的制動力矩模型
圓盤式MRF制動器的結(jié)構(gòu)原理如圖1所示,它主要由制動盤、轉(zhuǎn)軸、外殼、勵磁線圈四部分構(gòu)成。制動器中的有效MRF所具有的工作區(qū)域形狀是分別以R1和R2為半徑的圓環(huán)。
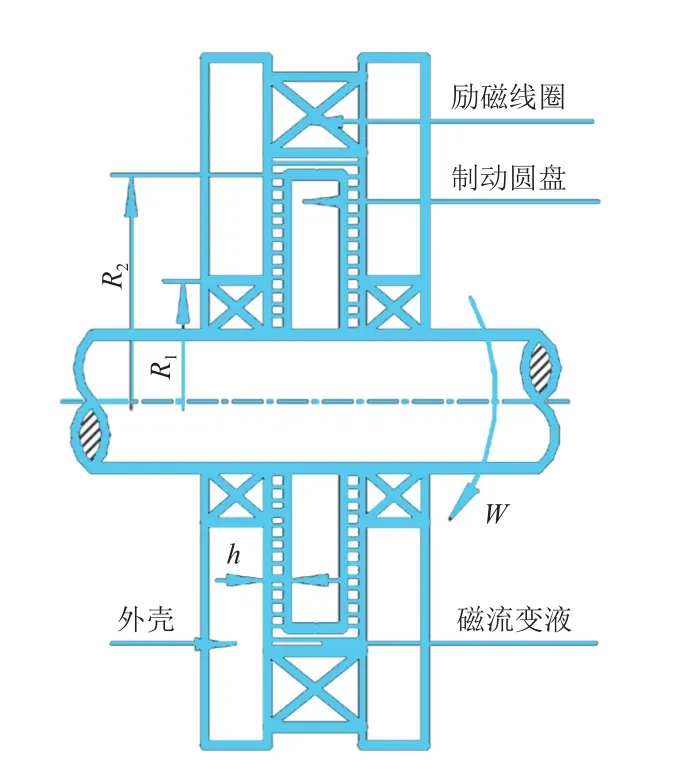
圖1 圓盤式MRF制動器結(jié)構(gòu)原理
如圖2所示,設(shè)制動器制動時轉(zhuǎn)軸以角轉(zhuǎn)速ω繞z軸旋轉(zhuǎn),制動器的工作面為R1和R2的圓環(huán)面,現(xiàn)以R1和R2的圓環(huán)為例進(jìn)行計(jì)算,取工作半徑為r處的微環(huán),其徑向?qū)挾葹閐r。
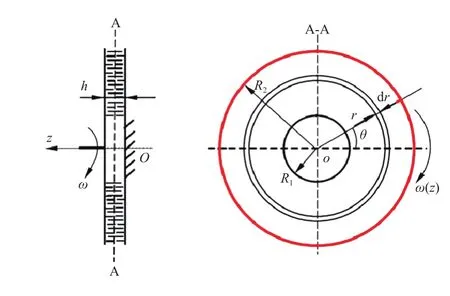
圖2 圓盤式制動器力矩分析計(jì)算簡圖
制動器在R1和R2圓環(huán)面的單面制動力矩為:
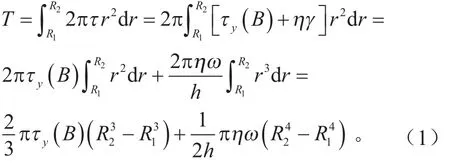
式中:B為磁場強(qiáng)度;r為所選點(diǎn)的旋轉(zhuǎn)半徑;η為動力粘度;ω為轉(zhuǎn)軸的角速度;h為工作間隙。
由于圓盤式MRF制動器有兩個工作面,因此,其總制動力矩為:

1.2 制動盤及殼體尺寸參數(shù)的確定
選取規(guī)格為165/60 R14的輪胎,根據(jù)裝配要求,制動器外殼與輪輞之間的間隙值應(yīng)不小于3 mm。根據(jù)設(shè)計(jì)經(jīng)驗(yàn),制動盤厚度值取10 mm,固定盤厚度值取12 mm;顧及加工、裝配等問題,工作間隙值取1.5 mm;根據(jù)安裝位置軸徑的尺寸確定制動盤內(nèi)半徑R=25 mm,工作區(qū)域最小半徑R1=25 mm;制動盤外半徑值R2由制動力矩公式計(jì)算。由于所設(shè)計(jì)的MRF制動器為雙盤式結(jié)構(gòu),依據(jù)圓盤式MRF制動器的制動力矩計(jì)算公式(2)可得出本文所設(shè)計(jì)的MRF制動器制動力矩計(jì)算公式(3)。

忽略粘性阻力矩部分,可得:

1.3 勵磁線圈的設(shè)計(jì)
MRF制動器的磁阻計(jì)算簡圖如圖3所示。其中,固定盤厚度為L1,制動盤厚度為L2,殼體厚度為L3,工作間隙的寬度為h,線圈寬度為b,外殼總厚度為L;工作區(qū)域的最小半徑為R1,最大半徑為制動盤的外半徑R2,隔磁固定環(huán)的安裝半徑為R3,固定盤的半徑為R4,殼體內(nèi)半徑為R5,殼體外半徑為R6。
圖3 MRF制動器磁阻計(jì)算簡圖
根據(jù)圖3所示,得到各段磁路的磁阻計(jì)算式如下:
式中:μm為流變液的磁導(dǎo)率;μ0為空氣磁導(dǎo)率。磁路的總磁阻為:

本文設(shè)計(jì)的MRF制動器所填充的MRF型號選用Lord公司MRF-132DG。依據(jù)Lord公司給出的技術(shù)數(shù)據(jù),磁感應(yīng)強(qiáng)度值約為0.75 T,屈服應(yīng)力τy(B)約為43 kPa,初步將此點(diǎn)取為工作點(diǎn)。將已知數(shù)值代入式(4)可得R2的最小值為126.26 mm,圓整取為R2=130 mm。根據(jù)已知參數(shù)值求出磁路的各段磁阻值,由式(5)可以得出磁路的總磁阻。
選擇勵磁線圈時應(yīng)盡量選擇電阻小的線圈,選擇公稱直徑d=0.63 mm的漆包線制作勵磁線圈,其可承載的最大工作電流為3 A。由此可得,所需的線圈匝數(shù)為966.4匝,取N=970匝。
由于線圈纏繞后導(dǎo)線之間存在間隙,因此取線槽的截面積必須大于970匝線圈的截面積的和。MRF制動器中的磁路為短時反復(fù)工作制,當(dāng)勵磁線圈通入3 A的最大電流時,該區(qū)域的電流密度為6.38 A/mm2,符合國家標(biāo)準(zhǔn)的要求。
1.4 整體參數(shù)的確定
MRF制動器的外殼厚度對制動器的性能有很大影響,該值太小時外殼會發(fā)生磁飽和現(xiàn)象,使制動器輸出力矩的最大值減小;太大時又會使制動器的體積和重量增大,容易超出空間限制且不利于安裝。因此,利用已知的參數(shù)建立MRF制動器的有限元模型,此時的殼體厚度L3為變量,以輸入電流密度的形式對勵磁線圈進(jìn)行加載,得到取不同殼體厚度時的工作間隙磁感應(yīng)強(qiáng)度,如圖4所示。
用Matlab數(shù)據(jù)進(jìn)行二次擬合,擬合曲線如圖4所示。由圖可知,當(dāng)外殼厚度L3小于11 mm時,工作間隙中的磁感應(yīng)強(qiáng)度隨著L3的變大而快速增長,此時外殼處于磁飽和狀態(tài);當(dāng)外殼厚度等于11 mm時,磁感應(yīng)強(qiáng)度的增速開始變得特別緩慢,此時殼體部分處于磁飽和的臨界點(diǎn);當(dāng)殼厚度大于11 mm時,工作間隙磁感應(yīng)強(qiáng)度幾乎不再隨著外殼厚度的增加而增長,所以外殼厚度值為L3=11 mm。
2 MRF制動器磁場有限元分析
2.1 磁場分析方法
本文所設(shè)計(jì)的MRF制動器屬于三維裝置,但是如果建立三維有限元模型,耗費(fèi)時間太長,不利于計(jì)算。由于MRF制動器具有結(jié)構(gòu)上的對稱性,并且通入的電流為直流電,所以可以建立二維模型,然后采用二維靜態(tài)磁場分析法進(jìn)行分析,同樣可以滿足設(shè)計(jì)要求。
2.2 MRF制動器磁場仿真分析
2.2.1 MRF制動器的有限元模型
對MRF制動器的1/2截面建立有限元模型。在建模過程中忽略裝配間隙、密封圈、螺釘?shù)刃〉某叽缃Y(jié)構(gòu),選擇二維靜態(tài)磁場分析法求解計(jì)算。定義相關(guān)材料單元類型是四邊形單元,為了減少有限元分析的計(jì)算時間,建模時忽略了模型周邊空氣中的漏磁情況。定義所需材料的屬性時,主要是材料的相對磁導(dǎo)率。建立好有限元模型后,將材料按照結(jié)構(gòu)賦予所建有限元模型的各個部分,然后設(shè)置按材料屬性顯示面的編號,最終的顯示結(jié)果如圖5所示。
圖5 MRF制動器有限元模型
2.2.2 加載荷和邊界條件并求解
由于分析時忽略漏磁的影響,所以需要將磁力線平行作為邊界條件。選擇勵磁線圈上的所有單元,以電流密度的形式對所選取的單元加載荷,MRF制動器施加的載荷是磁場電流密度,最后選中所建模型的外圍節(jié)點(diǎn)施加磁力線平行條件進(jìn)行求解。

圖6 MRF制動器的網(wǎng)格劃分模型
2.2.3 磁場仿真結(jié)果分析
當(dāng)勵磁電流為3 A時,MRF制動器磁力線分布和磁通密度矢量分別如圖7和圖8所示。由圖可知,勵磁線圈磁力線非均勻分布在制動盤上,并且離線圈越近磁力線越密集,走向基本和磁路設(shè)計(jì)一致,說明制動器的磁路設(shè)計(jì)和材料選用是合理的。
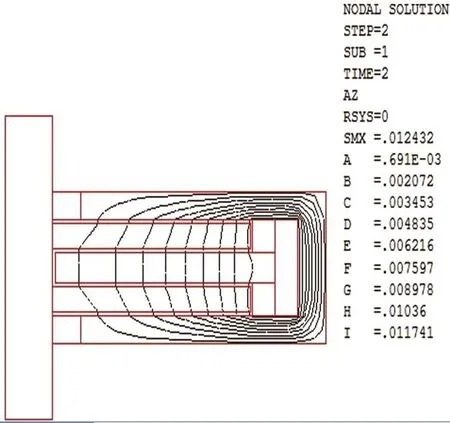
圖7 MRF制動器磁力線分布圖
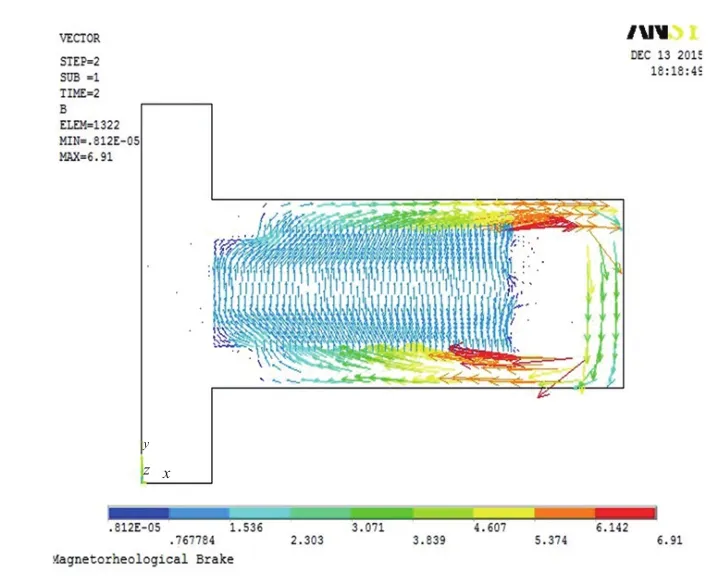
圖8 磁通密度矢量圖
由圖9可知,工作區(qū)域的磁通密度值隨勵磁電流值的增長而增長,在最大勵磁電流為3A時,MRF磁通密度的最大值仍低于飽和點(diǎn)的值。
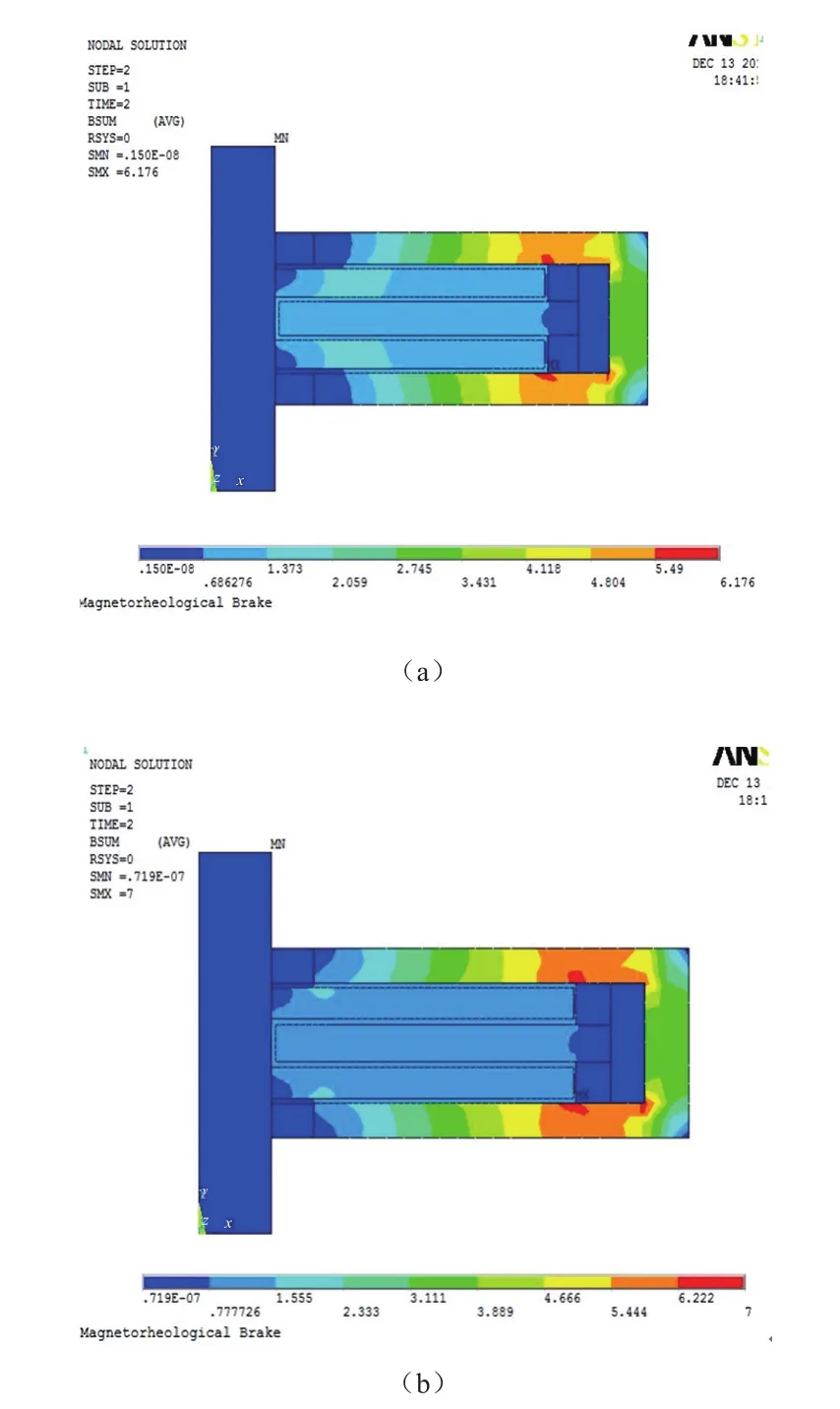
圖9 MRF制動器磁通密度分布圖
在相同電流密度載荷條件下,工作間隙值分別為0.5 mm、1.0 mm、1.5 mm、2.0 mm時的制動器磁通密度分布如圖10所示。
由圖可知,工作間隙值越大,工作區(qū)域的磁通密度就越小,制動力矩也相應(yīng)變小。但從磁通密度值的變化趨勢中可以看出,當(dāng)工作間隙增大到一定值時,工作間隙值的繼續(xù)增長對其磁通密度的影響將會變得很微弱,即這種影響僅在一定范圍內(nèi)有效。
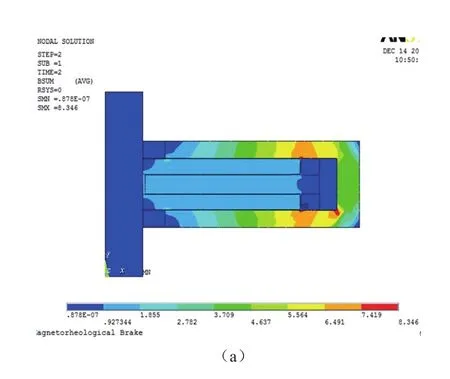
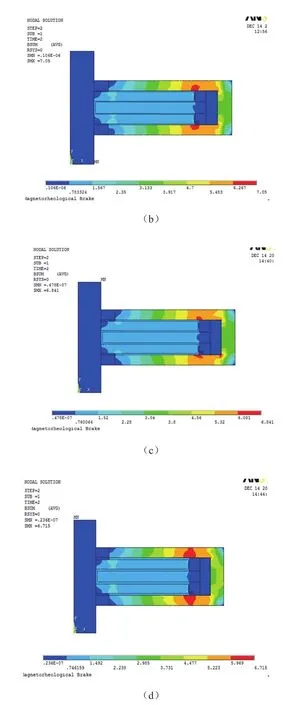
圖10 制動器磁通密度分布
3 試驗(yàn)
磁場仿真結(jié)果證明本文的設(shè)計(jì)方案能滿足制動器磁路設(shè)計(jì)的要求。加工制造MRF制動器的試驗(yàn)樣機(jī),驗(yàn)證磁場仿真的可靠性。
本試驗(yàn)旨在測試MRF制動器的輸入電流與輸出力矩。通過調(diào)節(jié)直流穩(wěn)壓電源得到制動器的輸入電流分別為0 A、0.4 A、0.8 A、1.2 A、1. 6 A、2.0 A、2.2 A、2.4 A、2.6 A、2.8 A、3.0 A,并分別記錄各個輸入電流值下的輸出力矩。為了與理論計(jì)算值相對比,還在表1中列出了理論輸出力矩。

表1 輸入電流與輸出力矩的關(guān)系

圖11 磁流變制動器實(shí)物樣機(jī)
4 試驗(yàn)結(jié)論分析
(1)隨著輸入電流增大,MRF制動器的輸出力矩增大。當(dāng)電流在0.4~2.0 A的范圍時,輸入電流與輸出力矩幾乎呈線性關(guān)系。
(2)當(dāng)電流為0 A時,MRF表現(xiàn)出牛頓流體的性質(zhì),此時輸出力矩只是很小的粘性力矩,其理論計(jì)算值僅為0.8 Nm。
(3)理論輸出力矩和實(shí)際輸出力矩有誤差。因?yàn)樵谥苿悠鲗?shí)際制作中存在結(jié)合間隙減弱的情況,存在摩擦和漏磁以及試驗(yàn)臺搭建過程中的誤差等,所以達(dá)不到仿真時的強(qiáng)度,從而導(dǎo)致實(shí)際輸出值比理論值偏小。
(4)當(dāng)電流為3 A時,MRF制動器的實(shí)際輸出力矩為237.2 Nm,而普通汽車緊急制動所需的最大制動力矩為200 Nm,普通制動所需的制動力矩小于200 Nm,所以MRF制動器輸出力矩完全滿足微型汽車的200 Nm的需要。
5 結(jié)論
提出一種多盤式MRF制動器,對其進(jìn)行了結(jié)構(gòu)和磁路設(shè)計(jì),并且對磁路設(shè)計(jì)進(jìn)行了磁場仿真。仿真結(jié)果表明,MRF制動器工作區(qū)域的磁通密度值伴隨勵磁電流值的增長而增長,在最大勵磁電流為3 A時,MRF磁通密度的最大值仍低于飽和點(diǎn)的值。MRF制動器在相同電流密度載荷條件下,觀察工作間隙值分別為0.5 mm、1.0 mm、1.5 mm、2.0 mm時的制動器磁通密度分布,能夠看出工作間隙值越大工作區(qū)域的磁通密度就越小,制動力矩也相應(yīng)變小。但是從磁通密度值的變化趨勢中可以看出,當(dāng)工作間隙增大到一定值時,工作間隙值的繼續(xù)增長對其磁通密度的影響將會變得很微弱,即這種影響僅在一定范圍內(nèi)有效,所以,該MRF制動器的結(jié)構(gòu)和磁路設(shè)計(jì)是合理的。為了驗(yàn)證仿真結(jié)果的可靠性,對該制動器的實(shí)際輸出力矩進(jìn)行了試驗(yàn)驗(yàn)證。試驗(yàn)結(jié)果表明,當(dāng)電流為3 A時,MRF制動器的實(shí)際輸出力矩為237.2 Nm,而普通汽車緊急制動所需的最大制動力矩為200 Nm,普通制動所需的制動力矩小于200 Nm,所以,MRF制動器輸出力矩完全滿足微型汽車200 Nm的需要。本設(shè)計(jì)方案能滿足汽車制動器的實(shí)際需求,為MRF制動器應(yīng)用到汽車制動中提供了新思路。
參考文獻(xiàn)(References):
[1] 李志華,喻軍,曾寧,等. 圓盤式磁流變制動器仿真優(yōu)化設(shè)計(jì) [J]. 農(nóng)業(yè)機(jī)械學(xué)報,2015,46(10):364-369.LI Zhihua,YU Jun,ZENG Ning,et al. Simulation and Optimization Design of Disc-type Magnetorheological Brake [J]. Transactions of the Chinese Society for Agricultural Machinery,2015,46(10):364-369. (in Chinese)
[2]華文林. 磁流變液制動器的設(shè)計(jì)與研究 [D]. 武漢:武漢理工大學(xué),2002.HUA Wenlin. Design and Research of Magnetorheological Fluid Brake [D]. Wuhan:Wuhan University of Technology,2002.(in Chinese)
[3]劉成. 磁流變液制動器的分析與設(shè)計(jì) [D]. 重慶:重慶理工大學(xué),2010.LIU Cheng. Analysis and Design of MRF Brake [D].Chongqing:Chongqing University of Technology,2010.(in Chinese)
[4]張賀. 磁流變制動器的結(jié)構(gòu)設(shè)計(jì)與性能研究 [D]. 長春:長春工業(yè)大學(xué),2016.ZHANG He. Structure Design and Performance Research of Magnetorheological Brake [D]. Changchun:Changchun University of Technology,2016. (in Chinese)
[5]鄭開魁. 磁流變液制動器的研究及其應(yīng)用 [J]. 機(jī)電技術(shù),2014(4):153-156.ZHENG Kaikui. Research and Application of Magnetorheological Fluid Brake [J]. Electromechanical Technology,2014(4):153-156. (in Chinese)
[6]田朝陽,張江濤,郭志軍,等. 圓盤式磁流變液制動器理論設(shè)計(jì)與仿真分析 [J]. 拖拉機(jī)與農(nóng)用運(yùn)輸車,2014(3):19-21.TIAN Zhaoyang,ZHANG Jiangtao,GUO Zhijun,et al.Theoretical Design and Simulation Analysis of Disc MRF Brake [J]. Trator and Farm Transporter,2014(3):19-21.(in Chinese)
猜你喜歡
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
上海節(jié)能(2020年3期)2020-04-13 13:16:16
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:00
天津醫(yī)科大學(xué)學(xué)報(2019年6期)2019-08-13 07:04:32
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
機(jī)械工程師(2015年10期)2015-02-02 01:14:03
機(jī)電產(chǎn)品開發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24