橋梁施工掛籃智能化控制系統研究
2018-03-01 11:57:51吳明威劉冬冬周雷李耀宗
中國港灣建設 2018年1期
吳明威,劉冬冬,周雷,李耀宗
(中交二航局第五工程分公司,湖北 武漢 430000)
0 引言
雖然掛籃施工工藝已經十分成熟,然而掛籃設備自身自動化程度低,掛籃的提升、下放、行走等動作仍然需要大量的工人來配合,沒有實現集中監控,總體來說有以下缺點:
1)掛籃施工現場需要大量工人配合,掛籃動作的位移、支撐點反力完全依靠肉眼判斷,安全性無法保障。
2)沒有精密的傳感技術配合,掛籃施工質量穩定性無法控制。
3)人工逐點操作耗時長,浪費大量的施工時間。
以加快淘汰落后工藝技術和設備,推廣應用自動化、數字化、網絡化、智能化等先進制造系統、智能制造設備及大型成套技術裝備為目標,勢必要對傳統掛籃控制系統進行革新。
1 前支點掛籃自動化控制系統概況
掛籃自動化控制系統是一套集機械、電氣、液壓以及自動化技術于一體的特種施工控制系統。本系統提高了傳統掛籃施工過程中大型掛籃各執行機構的動作效率,并添加了遠程操作、監控等功能。相對于傳統的掛籃機構動作方式,其具有自動化程度高、遠程操作及監控方便、掛籃機構動作效率高等優點。
1.1 組成
1套掛籃自動化控制系統主要由以下幾個部分組成,如圖1所示[1-2]。
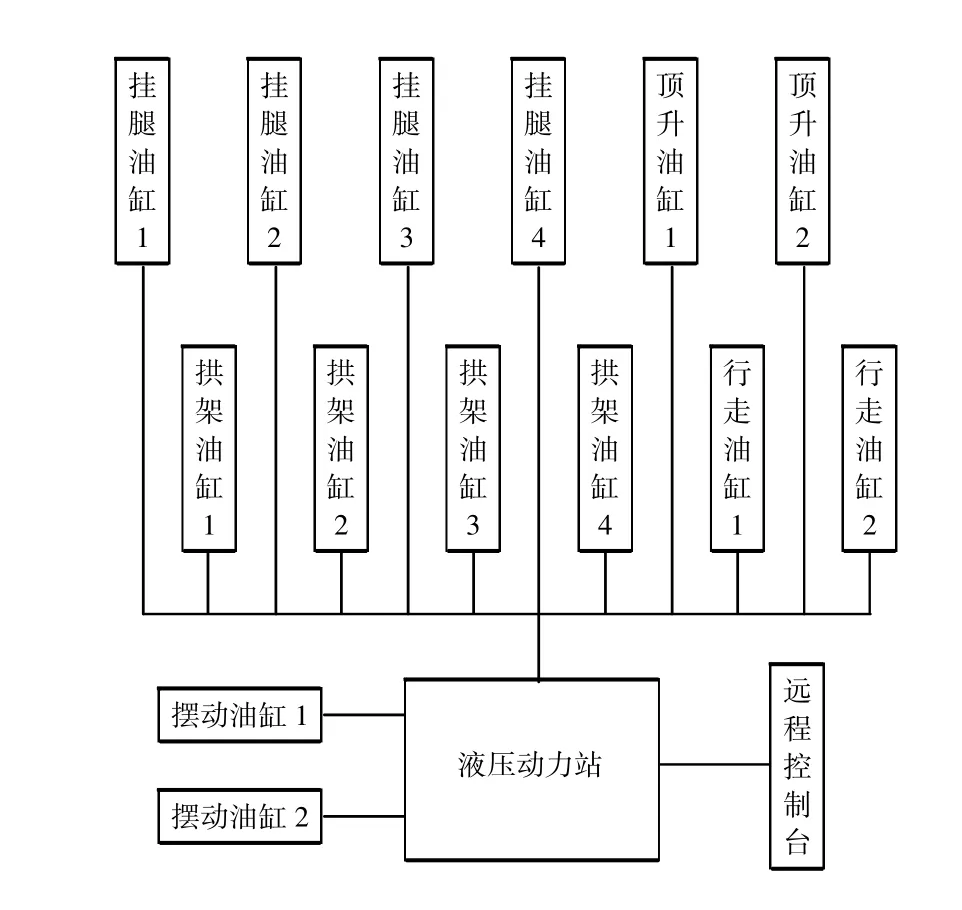
圖1 掛籃自動化液壓控制系統組成Fig.1 Automatic hydraulic control system of hanging basket
掛腿油缸4臺、頂升油缸2臺、拱架油缸4臺、掛籃行走油缸2臺、擺動油缸2臺;液壓泵站1臺;控制系統1套。
1.2 工作原理
液壓動力站通過驅動液壓油缸實現掛籃的同步提升和下放、拱架提升和下放、掛籃行走及反滾輪翻轉動作。掛籃的上升和下降動作由4個150 t掛腿油缸和2個150 t頂升油缸協同完成;拱架的提升和下放動作由4個10 t的雙級油缸協同完成;掛籃的行走動作由2個50 t行走油缸完成;掛籃反滾輪的翻轉動作由2個擺動油缸完成。
2 液壓系統
液壓泵站是整個系統中十分關鍵的組成部分,它為系統執行元件運行提供了可靠的動力,以此驅動液壓缸各種動作。此液壓泵站是專為掛籃自動化控制系統設計的液壓系統,每臺掛籃的動作執行由1個液壓泵站提供動力,一共14個液壓油缸動作。
每臺泵站主要包括:控制柜、電機、高壓柱塞泵、比例閥、平衡閥、液壓鎖、油箱等,液壓泵站到頂推設備通過膠管連接,膠管兩端采用快插接頭的形式,安裝與拆卸十分方便。
本液壓系統為恒壓力系統,液壓原理圖見圖2。
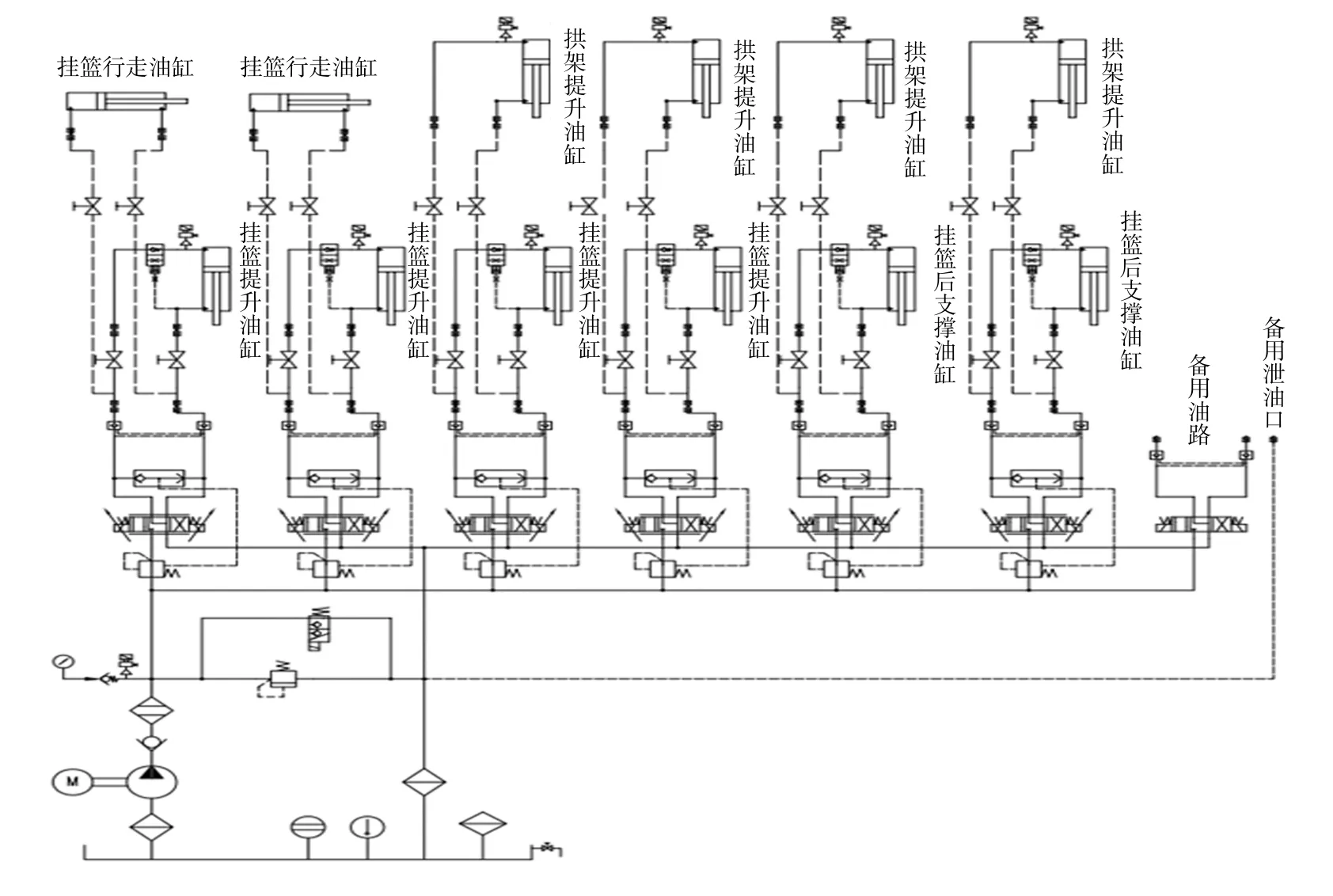
圖2 液壓原理圖Fig.2 Hydraulic principle diagram
采用節流調速的形式,回路由柱塞泵、電磁溢流閥、以及多臺比例換向閥組成,能夠無級調節每個油缸執行動作的運行速度;系統的液壓泵采用定量柱塞泵,其性能穩定,可靠性高,能夠適應系統由于節流調速而長時間處于高負荷運轉的狀態。在重力方向工作的液壓油缸上安裝有平衡閥、液壓鎖,能夠有效防止系統超載、帶負載墜落等危險情況發生。控制油缸速度的每個電磁比例閥均裝有壓力補償器,可以實現與負載無關的速度精準調節。
3 控制系統
3.1 控制系統概述
掛籃自動化控制系統為典型的主從分布式控制系統,采用PLC+工控機的組合[3]。主控與各個分控之間通過通訊線連接,主要接收來自各個泵站分控傳遞回來的信息并顯示到上位機,以及發送操作人員指令;分控與泵站集成在一起,負責所對應設備液壓泵與閥的控制信號的發送,以及各個執行液壓缸狀態傳感器信號的收集;兩者配合,以閉環控制的方式實現掛籃升降、拱架升降、掛籃行走的精確同步。
掛籃自動化控制系統主要包括主控臺、泵站分控柜、執行油缸傳感器接線盒、傳感器、信號電纜、電源電纜、通訊電纜等。
控制系統具有以下特點:
1)分布式控制方式,實現設備遠程操控,充分保證人員安全。
2)硬件上,采用屏蔽、隔離等抗干擾措施,對電源系統的過電流保護,系統具有較強的可靠性能力。
3)用多路傳感器檢測技術,以采集系統的實時數據,并有效反饋,使系統處于全監控狀態,安全穩定的運行。
4)PLC和工控機組合控制方式,點對點傳輸,在工控機上監視,減少冗余件,提高系統可靠性,減少故障率。
5)緊急情況下能實現一鍵(急停)斷開所有輸出點,確保安全。
6)采用PID控制比例閥技術,實現無級調速。
3.2 控制系統各部件
1)主控臺
主控臺是整個系統的控制中樞,所有分控的位置信號、壓力信號、反饋信號等均傳遞到主控,在主控PLC中按照一定的算法程序進行判斷處理,并將計算得到的指令返回給分控,以此實現各個動作的同步。同時系統的操作主要在主控臺進行,按照功能主控臺可以分為監控區和操作區。監控區為1臺21寸的電腦液晶顯示屏,顯示各個設備的狀態信息,如:位移、壓力、動作方向等,同時顯示屏上還設置了一些虛擬按鈕與數字輸入框,可以實現設備的選擇、比例閥開口值設置等,監控界面見下圖3;操作區為操作按鈕。
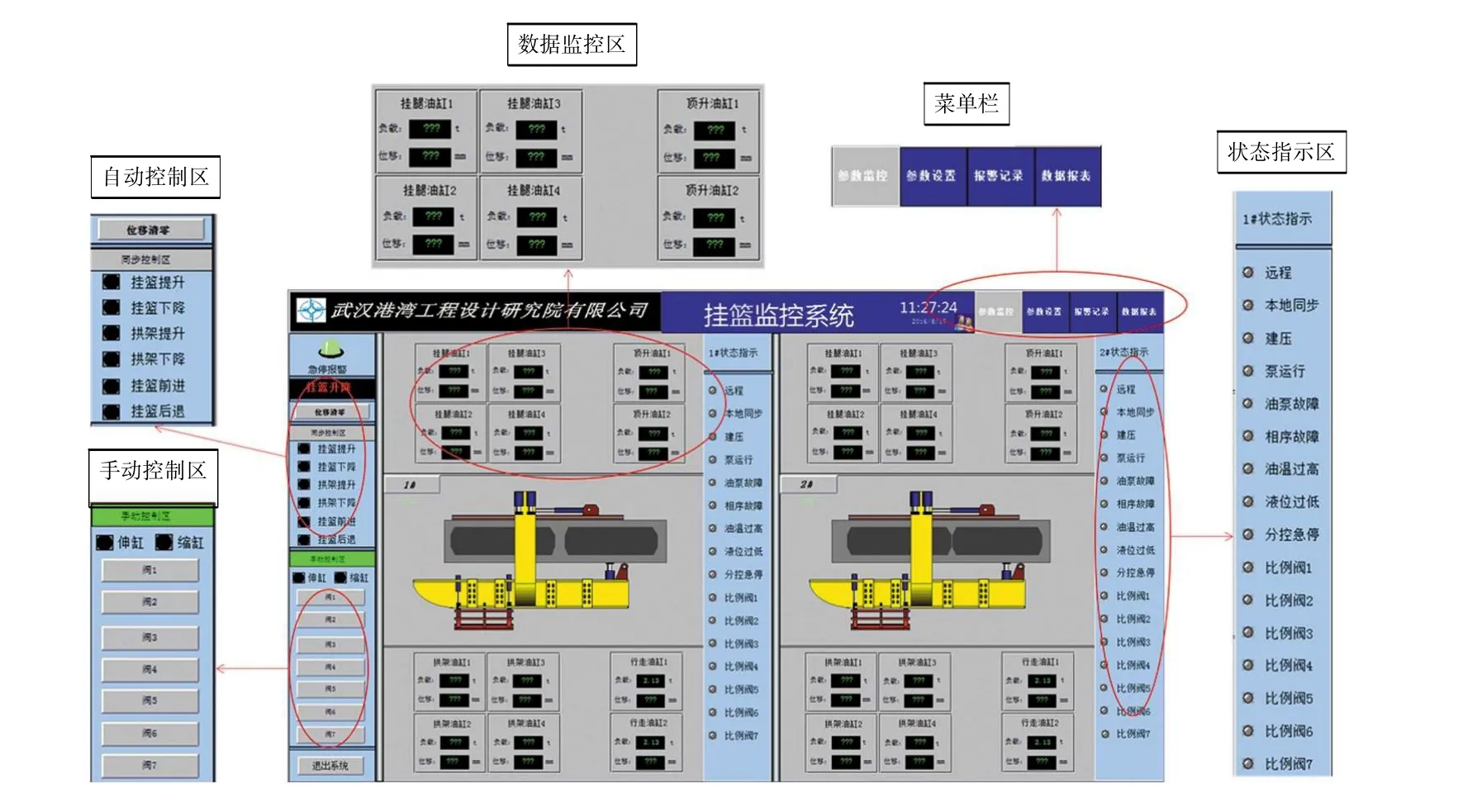
圖3 主控臺監控界面Fig.3 Console monitor interface
2)泵站分控柜
分控PLC主要實現泵站電機的啟動、液壓閥控制信號的發送、以及各個傳感器信號的采集并與主控PLC通訊等作用,另外分控可以獨立于主控之外控制其所對應的設備動作,其控制的電機功率11 kW,直接啟動。
3)傳感器
設備傳感器接線盒主要用于傳感器接線匯集作用,從而可以方便油缸與泵站之間通過1根控制電纜連接,接線盒接頭均為防水接頭,接線盒用螺釘固定于油缸法蘭盤上。
位移傳感器用于測量掛籃設備3個動作上的位移,掛籃升降、拱架升降、掛籃行走,量程分別為2 000 mm、2 500 mm、1 500 mm,精度為0.3%FS,24 V DC輸入,4~20 mA輸出。
壓力傳感器用于測量支撐頂工作狀態下的實時壓力值,量程40 MPa,精度為0.5%FS,24 V DC輸入,4~20 mA輸出。
3.3 系統連接
整套系統接線圖如圖4所示,主要有通訊線和控制線,通訊線為紫色兩芯屏蔽線;控制線為黑色四芯屏蔽線,控制線連接油缸接線盒到泵站,通訊線則將2臺掛籃依次串聯起來由1臺主控控制。
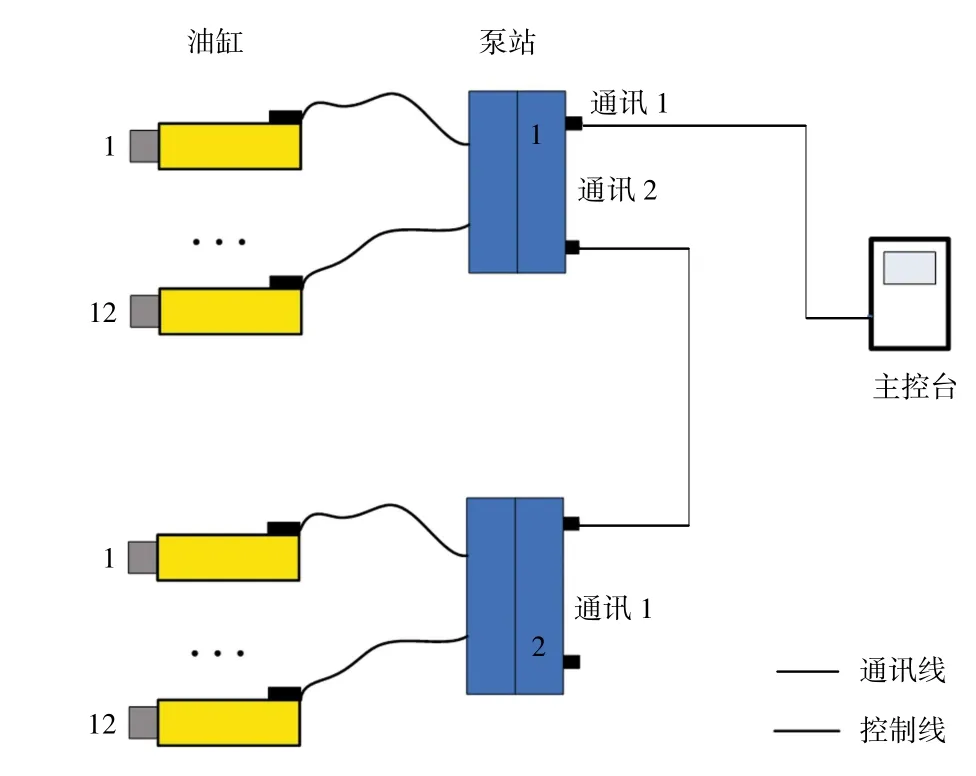
圖4 系統連接示意圖Fig.4 Schematic diagram of system connection
4 操作流程
設備安裝到位,電源線、通訊線、與控制線連接好以后,設備即可以開始運行,具體操作流程與步驟如下:
1)檢查工作
待系統連接檢查準確無誤,所有準備工作就緒后,給各分控泵站通上電源(注意相序),合上箱內的所有空開,進行設備檢查:先將分控柜操作面板上旋鈕打到“手動”、油缸“保持”狀態,按下“啟動電機”按鈕,電機正常運行,待電機空轉5 min以后,按下“建壓”按鈕,然后分別依次選擇1~6閥,根據手動截止閥的標牌選擇不同的油缸進行伸缸/縮缸動作,確認無誤后按下“停止建壓”按鈕、“停泵”按鈕,然后將“自動/手動”旋鈕打到“自動”,每個分控都需要這樣操作1次。
2)主控開機
給主控臺接上電源(220 V),合上內部空氣開關,將主控臺面板上的電源開關旋鈕撥向右邊,電源指示燈亮,此時系統電源接通,面板上的“手動/自動”旋鈕可以根據需要撥動:自動狀態下選中的設備將自動保持速度一致,同步動作;手動狀態下設備將不同步,一般帶負載同步動作時選擇同步,空載時不同步。
3)系統登陸
電源開啟后可啟動電腦,雙擊桌面上的圖標,進入程序界面,選擇要運行的程序“烏江大橋掛籃自動化控制系統”,左鍵單擊“運行”,即可進入監控程序界面。
4)監控界面介紹
監控畫面可以劃分為4個區:按鈕區、監視區、標題區以及菜單欄。
標題區顯示了公司名稱、系統名稱、和日期時間。
按鈕區為操作控制區,從上到下分為系統指示、同步控制、手動控制。
5)主控操作
進入監控界面后,點擊“參數設置”,此界面主要是對各臺比例閥參數、以及反饋比例系數進行設置,可以調節設備運行的速度,比例閥參數的輸入范圍為15 000~32 000,默認情況設置為25 000,“比例系數”為多點同步運行時的反饋系數,輸入范圍為0~2 500,參數值需要在實際運行時調試確定,默認值2 000。
6)掛籃同步頂升/下降操作
進行掛籃同步頂升/下降操作前,應首先硬件上切換各個油缸對應的球閥,4個掛腿油缸,以及2個頂升油缸球閥應處于打開狀態,其它油缸對應球閥應處于閉合狀態
然后進行功能選擇,將主控臺“行走/升降/拱架”3檔旋鈕開關旋至“升降”檔,表明此時將進行的是掛籃頂升與下放操作,然后進行“啟泵”——“建壓”操作。
7)拱架同步提升/下降操作
進行拱架同步提升/下降操作前,應首先硬件上切換各個油缸對應的球閥,4個拱架提升油缸球閥應處于打開狀態,其它油缸對應球閥應處于閉合狀態。
然后進行功能選擇,將主控臺“行走/升降/拱架”3檔旋鈕開關旋至“拱架”檔,表明此時將進行的是掛籃頂升與下放操作,然后進行“啟泵”——“建壓”操作。
8)掛籃行走操作
進行拱架行走操作前,應首先硬件上切換各個油缸對應的球閥,2個行走油缸球閥應處于打開狀態,其它油缸對應球閥應處于閉合狀態。
然后進行功能選擇,將主控臺“行走/升降/拱架”3檔旋鈕開關旋至“行走”檔,表明此時將進行的是掛籃行走操作,然后進行“啟泵”——“建壓”操作。
5 應用效果
5.1 操作效率
對比公司施工的不同時期的類似項目,鄂黃長江大橋、赤石大橋[4]、淮安大橋[5]、榮烏黃河大橋[6]均采用傳統的單點操作進行掛籃提升下放行走,單個循環(掛籃下放、行走、提升錨固調整標高)所需時間均在20 h左右,自動化控制系統在烏江大橋應用后單個循環時間縮短至10 h,節約了工期。
5.2 同步性
傳統操作方法多點之間同步性較差,手動量取每個千斤頂行程,手動調控多點之間進程,無科學的壓力位移控制調節系統。烏江特大橋采用液壓自動化系統,實現了掛籃操作實施控制,利用反饋控制閉環系統,將同步精度控制在3 mm內,掛籃操作同步性、協調性實現了質的飛躍。
5.3 減少勞動力
完全釋放了勞動力,只用1個主控制柜操作人員就可實現主邊跨掛籃同時精準動作。無論是時間效益、人工成本都得到極大節約。完全顛覆傳統掛籃操作方式,可以說是前支點掛籃操作領域革命性的改進。
6 結語
掛籃自動化控制系統在烏江大橋前支點掛籃施工中得到研發應用,提高了效率,降低了勞動力,目前此類控制系統已應用在橋梁頂推、前支點掛籃中,通過適當的改造該系統也可適用于各種形式的掛籃液壓系統中,對助推橋梁施工裝備的自動化、智能化、網絡化、集約化起到了促進作用。
[1]中交武漢港灣工程設計研究院有限公司.烏江大橋掛籃自動化控制系統操作及維護說明手冊[Z].2016.CCCC Wuhan Harbour Engineering Design&Research Co.,Ltd.Wujiang Bridge hanging basket automatic control system operation and maintenancemanual[Z].2016.
[2]中交二航局烏江大橋項目部.烏江大橋上部結構施工方案[R].2016.Wujiang Bridge Project Department of CCCC Second Harbour Engineering Co.,Ltd.Construction scheme of superstructure of Wujiang Bridge[R].2016.
[3] 李先允.自動控制系統[M].北京:高等教育出版社,2003.LI Xian-yun.Automatic control system[M].Beijing:Higher Education Press,2003.
[4]中交二航局赤石大橋項目部.赤石大橋上部結構施工方案[R].2013.Chishi Bridge Project Department of CCCCSecond Harbour Engineering Co.,Ltd.Construction scheme of superstructure of Chishi Bridge[R].2013.
[5]中交二航局淮安大橋項目部.淮安大橋上部結構施工方案[R].2003.Huaian Bridge Project Department of CCCCSecond Harbour Engineering Co.,Ltd.Construction scheme of superstructure of Huaian Bridge[R].2003.
[6]中交二航局榮烏大橋項目部.榮烏大橋上部結構施工方案[R].2013.Rongwu Bridge Project Department of CCCC Second Harbour Engineering Co.,Ltd.Construction scheme of superstructure of Rongwu Bridge[R].2013.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
家庭影院技術(2017年9期)2017-09-26 03:41:45
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文周刊·小學一年級版(2016年28期)2017-06-03 00:28:49