GNSS RTK接收機(jī)檢定的國際標(biāo)準(zhǔn)ISO 17123-8及其實(shí)驗(yàn)結(jié)果分析
2018-03-06 12:28:42陳海林
導(dǎo)航定位學(xué)報(bào) 2018年1期
陳海林
(中海石油技術(shù)檢測(cè)有限公司,天津 300452)
0 引言
全球衛(wèi)星導(dǎo)航系統(tǒng)(global navigation satellite system,GNSS)技術(shù)在各個(gè)行業(yè)獲得了廣泛的應(yīng)用,成為野外導(dǎo)航定位的有力工具。傳統(tǒng)的靜態(tài)測(cè)量需要較長(zhǎng)的測(cè)量時(shí)間,除特別需要進(jìn)行高精度測(cè)量外,一般都采用實(shí)時(shí)動(dòng)態(tài)載波相位差分(real time kinematic,RTK)的方法來獲取待定點(diǎn)的3維坐標(biāo)。RTK的實(shí)質(zhì)就是把基準(zhǔn)站觀測(cè)到的載波相位觀測(cè)值和基準(zhǔn)站的位置信息以一定的格式通過數(shù)據(jù)傳輸設(shè)備實(shí)時(shí)地傳送給流動(dòng)站,在流動(dòng)站組成差分方程,實(shí)時(shí)地給出用戶所在位置的厘米級(jí)3維坐標(biāo)信息和精度指標(biāo)[3]。基準(zhǔn)站(亦稱為參考站)的作用是為流動(dòng)站提供提供改正信息,用以消除或降低多路徑效應(yīng)、電離層影響、對(duì)流層影響等對(duì)測(cè)量結(jié)果的影響,基準(zhǔn)站可以是與流動(dòng)站相距幾千米的另外一臺(tái)GNSS接收機(jī)(該臺(tái)GNSS接收機(jī)可以架設(shè)在已知點(diǎn)上,也可以架設(shè)在未知點(diǎn)上);也可以是來自連續(xù)運(yùn)行參考站(continuously operating reference stations,CORS)的虛擬參考站[4-5],這種方法也稱為網(wǎng)絡(luò)RTK。
為了檢定RTK的測(cè)量精度,國家測(cè)繪地理信息局曾于2009年發(fā)布了全球?qū)Ш叫l(wèi)星系統(tǒng)(GNSS)測(cè)量型接收機(jī)RTK檢定規(guī)程CH/T 8018—2009[6],該規(guī)程已經(jīng)應(yīng)用到了我國的GNSS RTK接收機(jī)的檢定中,也為廣大測(cè)繪工作者所熟知。但CH/T 8018—2009僅僅是國內(nèi)標(biāo)準(zhǔn),與國際標(biāo)準(zhǔn)化組織(International Organization for Standardization,ISO)發(fā)布的國際標(biāo)準(zhǔn)ISO 17123-8[7]相去甚遠(yuǎn)。采用國際標(biāo)準(zhǔn)、消除技術(shù)壁壘,是國際社會(huì)的通行準(zhǔn)則。本文就有關(guān)GNSS RTK接收機(jī)檢定的國際標(biāo)準(zhǔn)ISO 17123-8作一介紹,供廣大從業(yè)者參考。
1 國際標(biāo)準(zhǔn)ISO 17123-8檢定方法
國際標(biāo)準(zhǔn)ISO 17123-8采用圖1所示的場(chǎng)地來檢定GNSS RTK接收機(jī)。如果是網(wǎng)絡(luò)RTK,則不需要基站。兩個(gè)流動(dòng)站之間的距離a為2~20 m;流動(dòng)站之間水平距離及高差用除RTK方法之外的其他方法測(cè)定,其精密度優(yōu)于3 mm,這些值稱為參考值,參考值用來考察檢核用流動(dòng)站坐標(biāo)計(jì)算出的流動(dòng)站之間的距離和高差之間是否存在異常值,參考值并不參與統(tǒng)計(jì)檢驗(yàn);流動(dòng)站與基準(zhǔn)站之間的距離b與執(zhí)行的任務(wù)相匹配;流動(dòng)站及基準(zhǔn)站上天線的對(duì)中精度為1 mm;天線高的測(cè)量精度為1 mm。
國際標(biāo)準(zhǔn)ISO 17123-8檢定過程的觀測(cè)數(shù)據(jù)由不同序列構(gòu)成,每個(gè)序列包含5組觀測(cè)數(shù)據(jù),每組觀測(cè)數(shù)據(jù)包含流動(dòng)站1及流動(dòng)站2的連續(xù)觀測(cè)數(shù)據(jù)。相鄰觀測(cè)數(shù)據(jù)組之間的時(shí)間間隔為5 min,這樣一個(gè)序列的5組觀測(cè)數(shù)據(jù)需要25 min。由于多路徑效應(yīng)影響的變化周期為20 min,因此這5組觀測(cè)應(yīng)該均勻分布在這25 min之內(nèi)。為了克服衛(wèi)星星座結(jié)構(gòu)變化、電離層及對(duì)流層對(duì)檢定結(jié)果的影響,相鄰序列的起始時(shí)間至少需要相隔90 min。這樣獲得的檢定結(jié)果才能夠反映各種誤差對(duì)RTK測(cè)量結(jié)果的影響。
國際標(biāo)準(zhǔn)ISO 17123-8有2種不同的野外檢定過程即簡(jiǎn)化檢定及完整檢定。簡(jiǎn)化檢定只包含一個(gè)序列,只進(jìn)行異常值探測(cè),不進(jìn)行統(tǒng)計(jì)檢驗(yàn)。完整檢定包含3個(gè)序列,可以進(jìn)行標(biāo)準(zhǔn)差計(jì)算及統(tǒng)計(jì)檢驗(yàn)。
1.1 簡(jiǎn)化檢定
如前所述,簡(jiǎn)化檢定只需要一個(gè)序列,5組觀測(cè)。表1表明了簡(jiǎn)化檢定采集數(shù)據(jù)的順序。

表1 一個(gè)序列的測(cè)量順序
數(shù)據(jù)采集后,計(jì)算第i(這里i=1)個(gè)序列中的第j組(這里j=5)數(shù)據(jù)所獲取的2個(gè)流動(dòng)站之間的水平距離、高差及與參考值之間的平差為
i=1;j=1,…,5。
(1)
式中:xi,j,k、yi,j,k及hi,j,k分別為流動(dòng)站的3維坐標(biāo)x、y、h;i為序列號(hào);j為組號(hào);k為流動(dòng)站號(hào);Di,j、Δhi,j分別為計(jì)算出流動(dòng)站之間的水平距離和高差與參考值的差值;D*、h*分別為流動(dòng)站之間水平距離及高差的參考值;εDi,j、εhi,j分別為水平距離及高差的偏差。由此計(jì)算出
(2)
式中:sxy、sh為完整檢定獲得水平距離及高差標(biāo)準(zhǔn)差;當(dāng)然sxy、sh也可以是由儀器生產(chǎn)廠家標(biāo)出的技術(shù)指標(biāo)。
如果由式(1)計(jì)算出的結(jié)果不滿足式(2)中的任意一項(xiàng),則有足夠的理由懷疑這次檢定結(jié)果是不可靠的,需要重新進(jìn)行檢定。
1.2 完整檢定
完整檢定包含3個(gè)序列,即完整檢定由3個(gè)簡(jiǎn)化檢定組成;相鄰的簡(jiǎn)化檢定起始時(shí)間至少需要相隔90 min。
在進(jìn)行數(shù)據(jù)處理之前,需要對(duì)著3個(gè)簡(jiǎn)單檢定獲取的數(shù)據(jù)分別進(jìn)行處理,處理方法與前述一致,確保每一個(gè)簡(jiǎn)單檢定的數(shù)據(jù)中都不包含粗差。處理步驟如下:
(3)
(k=1,2)
依據(jù)觀測(cè)值及式(3)可以計(jì)算出殘差r為
(4)
(i=1,2;j=1,…,5;k=1,2)。
計(jì)算殘差平方和為
(5)
流動(dòng)站坐標(biāo)的自由度vx、vy及vh是相等,其計(jì)算公式為
vx=vy=vh=(i·j-1)·p=
(3×5-1)×2=28
(6)
最后可以求出流動(dòng)站坐標(biāo)單次測(cè)量的實(shí)驗(yàn)標(biāo)準(zhǔn)差sx、sy及sh為
(7)
由式(7)可以求得GNSS RTK平面位置(x,y)的實(shí)驗(yàn)標(biāo)準(zhǔn)差sxy為
(8)
依據(jù)式(7)同樣可以計(jì)算出流動(dòng)站平面位置的標(biāo)準(zhǔn)不確定度uISO-GNSS?RTK-xy及高差的標(biāo)準(zhǔn)不確定度uISO-GNSS?RTK-h為:
uISO-GNSS?RTK-xy=sxy;
(9)
uISO-GNSS?RTK-h=sh。
(10)
為了說明在相應(yīng)自由度下獲得的sxy及sh的性質(zhì)后,需要回答以下問題:
1)平面位置的單次實(shí)驗(yàn)標(biāo)準(zhǔn)差sxy是否小于或等于制造商給出值σxy或小于其他方法給定的值σxy?
2)高差的單次實(shí)驗(yàn)標(biāo)準(zhǔn)差sh是否小于或等于制造商給出值σh或小于其他方法給定的值σh?
①同一臺(tái)儀器在不同的時(shí)間進(jìn)行的2次測(cè)量;
②不同儀器進(jìn)行的2次測(cè)量。
在置信水平為1-α=0.95、自由度為vx+vy=56的條件下,可以構(gòu)成表2所示的假設(shè)檢驗(yàn)。

表2 測(cè)量結(jié)果的統(tǒng)計(jì)檢驗(yàn)
對(duì)表1做如下說明:
1)問題1中的零假設(shè)為獲得的平面位置(x,y)的實(shí)驗(yàn)標(biāo)準(zhǔn)差sxy是否等于平面位置的理論精度(或者預(yù)先給出的值)σxy?只有滿足下列條件,才能夠接受零假設(shè):

(11)
(12)
(13)
(14)
如果不滿足式(14),則拒絕零假設(shè)。
2)問題1中的零假設(shè)為獲得的高差h的實(shí)驗(yàn)標(biāo)準(zhǔn)差sh是否等于高差的理論精度(或者預(yù)先給出的值)σh?只有滿足下列條件,才能夠接受零假設(shè):
(15)
(16)

(17)
(18)
如果不滿足式(18),則拒絕零假設(shè)。
(19)
(20)
F0.975(56,56)=1.70;
(21)
(22)
如果不滿足式(22),則拒絕零假設(shè)。

(23)
(24)
F0.975(28,28)=2.13;
(25)
(26)
如果不滿足式(26),則拒絕零假設(shè)。
對(duì)測(cè)量結(jié)果進(jìn)行不確定度評(píng)定是衡量測(cè)量質(zhì)量的重要方法。表3給出了不確定度的來源。
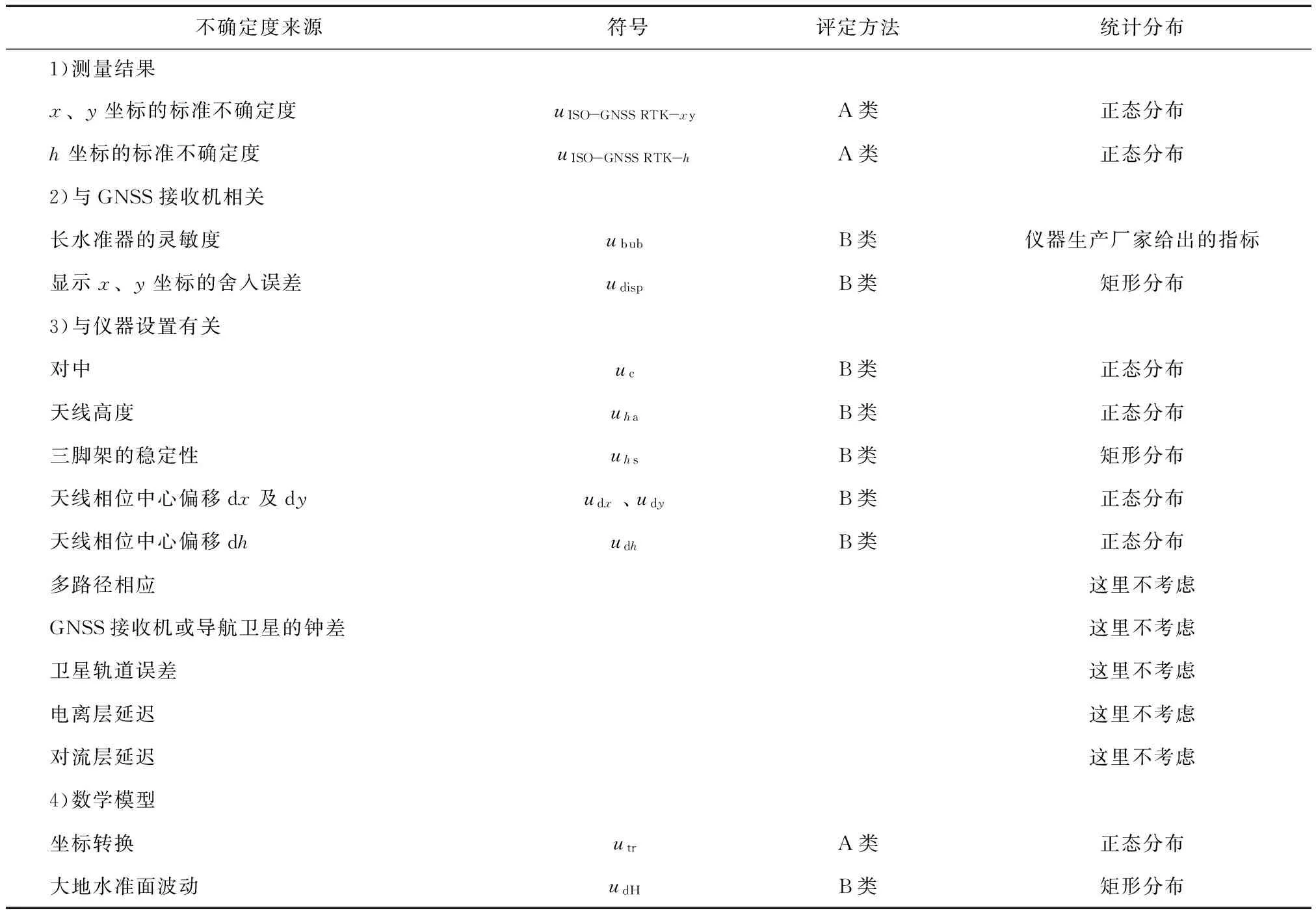
表3 GNSS(RTK)測(cè)量的誤差源及測(cè)量不確定度評(píng)定
從表3可以獲得平面位置坐標(biāo)的合成測(cè)量不確定度為
(27)
式中ha為天線高。
從表3可以獲得垂直坐標(biāo)的合成測(cè)量不確定度為
(28)
取包含因子k=2,則可得擴(kuò)展不確定度為:
Uxy=2·uxy;
(29)
Uh=2·uh。
(30)
2 實(shí)驗(yàn)檢定及結(jié)果分析
實(shí)驗(yàn)檢定用的設(shè)備為海星達(dá)H32,其標(biāo)稱的RTK 定位精度:平面為±(10 mm+1×10-6×D);高程為±(20 mm+1×10-6×D)。采用按照?qǐng)D1所示的設(shè)定流動(dòng)站及基準(zhǔn)站:2個(gè)流動(dòng)站之間的距離為15 m,高差相等;基準(zhǔn)站至流動(dòng)站之間的距離為100 m。流動(dòng)站之間的距離及高差采用標(biāo)稱測(cè)距精度為±(1 mm+1.5×10-6×D)、測(cè)角精度為±1″的TC-1201全站儀進(jìn)行測(cè)量,其結(jié)果為水平距離參考值D*= 14.99847 m,高差參考值h*=3.33 mm。
2.1 簡(jiǎn)化檢定
完全按照ISO 17123-8的要求獲取實(shí)驗(yàn)數(shù)據(jù),見表4。
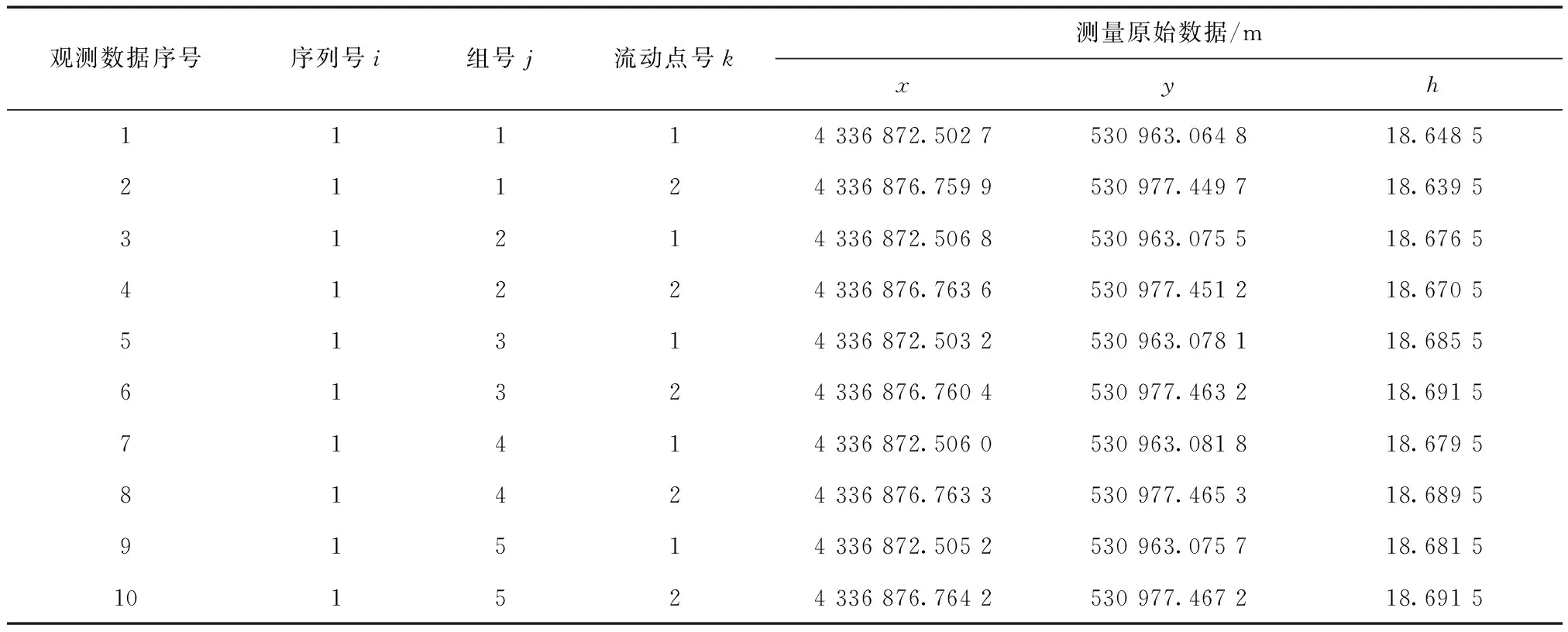
表4 簡(jiǎn)化檢定測(cè)量數(shù)據(jù)測(cè)量的誤差源及測(cè)量不確定度評(píng)定
按照式(1)及表2的數(shù)據(jù),可以獲得表3的計(jì)算結(jié)果。
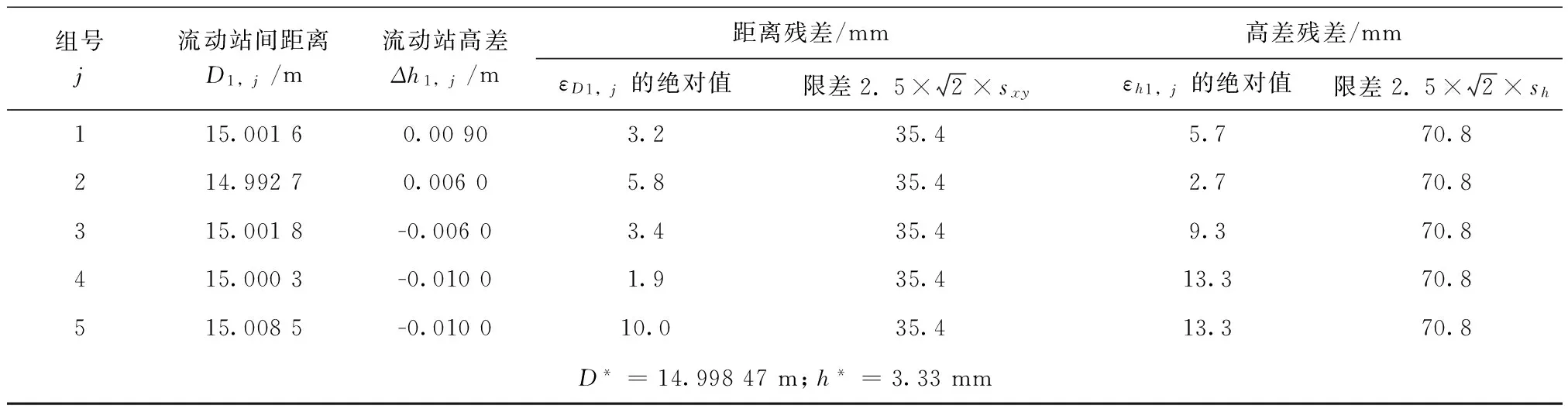
表5 簡(jiǎn)化檢定的計(jì)算結(jié)果
由表3可以看出,海星達(dá)H32的檢定結(jié)果滿足了國際標(biāo)準(zhǔn)ISO 17123-8的要求,與計(jì)量檢定結(jié)果一致。
2.2 完整檢定
完全按照ISO 17123-8的要求獲取了3個(gè)系列實(shí)驗(yàn)數(shù)據(jù),為了節(jié)省篇幅,這里僅僅列出按照式(7)及式(8)計(jì)算出的平面位置的實(shí)驗(yàn)標(biāo)準(zhǔn)差為sxy=7.5 mm;高差的實(shí)驗(yàn)標(biāo)準(zhǔn)差為sxy=16.1 mm。按照儀器生產(chǎn)廠家給出的技術(shù)指標(biāo),有σxy=10 mm;有σh=20 mm,則表明都接受零假設(shè),這套GNSS RTK的測(cè)量精度達(dá)到了儀器的出廠指標(biāo)。
由于測(cè)量不確定度還沒有在測(cè)繪行業(yè)廣泛應(yīng)用,限于篇幅,本文也不對(duì)檢定結(jié)果進(jìn)行測(cè)量不確定度評(píng)定。
3 結(jié)束語
GNSS RTK技術(shù)已經(jīng)成為一種常規(guī)測(cè)量手段,在測(cè)繪生產(chǎn)實(shí)踐中使用頻繁。按照CH/T 8018-2009 全球?qū)Ш叫l(wèi)星系統(tǒng)(GNSS)測(cè)量型接收機(jī)RTK檢定規(guī)程[6]的規(guī)定,其檢定周期為1年,這表明在這1年的有效期內(nèi),該套GNSS RTK的測(cè)量結(jié)果都應(yīng)該能夠滿足精度要求。但實(shí)際情況并非如此,各種因素的影響將導(dǎo)致GNSS RTK測(cè)量結(jié)果的精度降低,需要經(jīng)常重新對(duì)儀器進(jìn)行檢核。如果時(shí)常將儀器經(jīng)常送到儀器檢定中心進(jìn)行檢定,不僅費(fèi)時(shí)費(fèi)力,而且還會(huì)耽擱測(cè)繪任務(wù)的工期。因此,在儀器檢定的有效期內(nèi),建議作業(yè)單位自己按照ISO 17123-8所提出的檢定方法,對(duì)GNSS RTK進(jìn)行檢核,以確認(rèn)儀器處于良好工作狀態(tài)。
[1] 劉春保.2016國外導(dǎo)航衛(wèi)星發(fā)展回顧[J].國際太空,2017(2):34-42.
[2] 中國衛(wèi)星導(dǎo)航系統(tǒng)管理辦公室.北斗衛(wèi)星導(dǎo)航系統(tǒng)簡(jiǎn)介[EB/OL].[2017-05-28].http://www.beidou.gov.cn/xtjs.html.
[3] 張振軍,謝中華,馮傳勇.RTK 測(cè)量精度評(píng)定方法研究[J].測(cè)繪通報(bào),2007(1):26-28.
[4] 付兆祥,雷小鵬,唐紅濤.基于CORS系統(tǒng)的網(wǎng)絡(luò)RTK在圖根控制測(cè)量中的應(yīng)用[J].北京測(cè)繪,2016(5):117-120.
[5] 曹鴿,王玉柱.GPS、RTK、網(wǎng)絡(luò)RTK技術(shù)在工程測(cè)量中的應(yīng)用[J].北京測(cè)繪,2012(5):83-85.
[6] 國家測(cè)繪局.全球?qū)Ш叫l(wèi)星系統(tǒng)(GNSS)測(cè)量型接收機(jī)RTK檢定規(guī)程:CH/T 8018—2009[S]. 北京:測(cè)繪出版社,2009.
[7] International Organization for Standardization(ISO).Optics and optical instruments - Field procedures for testing geodetic and surveying instruments - Part 8:GNSS field measurement systems in real-time kinematic (RTK):ISO 17123-8[S]. 2nd ed.Switzerland:ISO,2015.
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
浙江國土資源(2019年10期)2019-10-31 03:17:00
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
建材發(fā)展導(dǎo)向(2019年10期)2019-08-24 06:25:28
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
