磁致伸縮位移傳感器的設計與實現
2018-03-07 01:33:53李學勝魏韶輝孫穎奇盧欣春
水電與抽水蓄能 2018年1期
李學勝,魏韶輝,孫穎奇,盧欣春
[南瑞集團(國網電力科學研究院)有限公司,江蘇省南京市 210003]
0 引言
位移測量是目前最基本的監測量,已經滲入到各行各業。通過位移監測可以為工程安全預警、水庫水壩液位預警、污水處理等提供可靠的依據,進而減少經濟損失、人員傷亡和不必要的資源浪費。隨著我國位移監測技術的發展,各行各業對位移傳感器的測量要求越來越高,不僅要求其測量精度高、使用壽命長、穩定性好,而且要求其測量范圍大,環境適應性強。目前,常用的位移傳感器有電阻式、電容式、電感式、光柵式、超聲波、雷達式等[1]。
本文設計的位移傳感器是基于磁致伸縮效應的磁致伸縮位移傳感器,可以實現非接觸、絕對式測量,具有測量精度高、量程大等特點,由于磁鐵和傳感器可以實現無接觸測量,因此傳感器可應用于易燃、易爆、易揮發、有腐蝕等惡劣的環境下,此外,傳感器能承受高溫高壓和高振蕩的環境。因此,目前已被廣泛應用于冶金、化工、環保、制藥等民用領域以及艦船、飛機、導彈等軍事領域[2-3]。
1 傳感器的工作原理
磁致伸縮位移傳感器是在法拉第電磁感應定律、鐵磁體磁致伸縮效應、超聲波傳輸原理等基礎上,配合現代電子技術和半導體工藝研制的高精度位移測量裝置,其工作原理如圖1所示。當傳感器工作時,脈沖發生器將一個問詢脈沖加載到波導絲上,該脈沖會以電磁波速沿波導絲向前傳播,由電磁場理論可得,在問詢脈沖的影響下,波導絲周圍會產生一個垂直于波導絲的環向磁場。當環向磁場與活動磁鐵產生的軸向磁場相遇時,就會互相疊加產生螺旋形磁場,由磁致伸縮效應可得,該螺旋形磁場使波導絲在活動磁鐵當前位置處產生瞬時扭轉形變,形成扭轉應變脈沖,應變脈沖是一種機械波,沿著波導絲向兩端傳播,當扭轉波傳播到波導絲末端時,被阻尼器吸收,防止波的反射干擾信號檢測。當扭轉波傳播到波導絲頂端時,檢測線圈能感應到由扭轉波所引起的波導絲磁場強度的變化,于是在線圈兩端就有感應電壓輸出。根據脈沖發射與電壓信號輸出的時間差計算活動磁鐵的位置,從而得到待測物體的位移量。
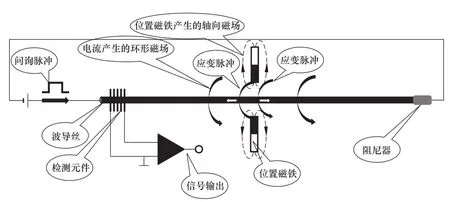
圖1 傳感器工作原理圖Fig.1 Sensor working principle diagram
2 傳感器結構設計
傳感器結構如圖2所示,主要包括密封堵頭、擋圈、位置磁鐵、波導絲保護管、測量電路密封殼體、密封電纜接頭等,儀器內部設有波導絲、波導絲屏蔽層、消回波裝置、波導絲直線度調節裝置、測量線圈、測量電路板等。
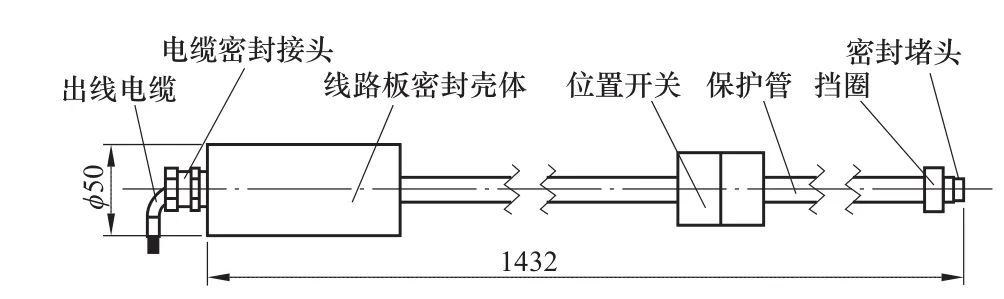
圖2 傳感器結構圖Fig.2 Sensor structure diagram
根據傳感器測量原理可知,應變脈沖是由問詢脈沖產生的磁場與位置磁鐵產生的磁場相互疊加致使波導絲發生變形而產生,然后通過檢測此脈沖,從而得到位置磁鐵的位置。目前市場上銷售的該類傳感器大多采用圓環或半圓環形狀的永久性磁體作為位置磁鐵,其磁場沿波導絲方向,再加上磁鐵的厚度,相當于磁場有一定的長度。所以,當位置磁鐵沿波導絲從左向右移動與從右向左移動,位置磁鐵產生的磁場與問詢脈沖產生的磁場疊加產生應變脈沖的位置出現偏差,從而導致傳感器的回差增大。為了減小儀器的回差,將位置磁鐵設計為沿圓周均勻分部的多個磁鋼,且磁鋼的磁場方向垂直與波導絲。
為了保證波導絲在其保護管中的直線度,提高傳感器的測量精度,該傳感器設置有波導絲拉緊裝置,安裝時通過調節該裝置,可以保證波導絲的直線度,提高儀器的測量精度。
機械波在波導絲中的傳播速度不僅與波導絲的密度、應力、材質等物理量有關,而且與環境溫度也密切相關。為了減少溫度對傳感器測量精度及長期穩定性的影響,儀器設置有校準裝置,通過測量位置磁鐵與校準裝置之間的距離差來測定位置磁鐵的相對位移,可以提高儀器的性能。
另外,為了減少回波對測量的影響,在波導絲兩端均設置有消回波的材料。
3 測量電路設計
磁致伸縮位移傳感器測量電路硬件原理如圖3所示。可以看出,測量電路主要由MCU模塊、問詢脈沖加載模塊、回波信號檢測模塊、TDC模塊等構成。MCU模塊用于協調各芯片工作,產生相應的激勵信號,將測量結果通過串口發送。問詢脈沖加載模塊包含了一個高階的電荷泵儲能電路以及一個放電控制場效應管。高階電荷泵用于在充電電容Ccharge兩端產生高達36V以上的激勵電壓,放電控制場效應管受MCU控制,導通后的瞬間將充電電容上儲存的電量經由波導絲泄放,以產生所需要的高幅值問詢電流脈沖。回波信號檢測模塊包含了一個電壓放大倍數約幾千倍的窄帶放大電路以及由高速比較器和施密特觸發器構成的比較整形電路。回波脈沖檢測模塊用于將同軸線圈接收到的回波信號提取出來,并整形成時間測量所需要的陡峭邊沿信號。TDC模塊主要包含了時間數字轉換芯片GP22以及其外圍電路。GP22擁有45ps的時間測量分辨率,可大幅度提高傳感器的位移檢測分辨率[4]。
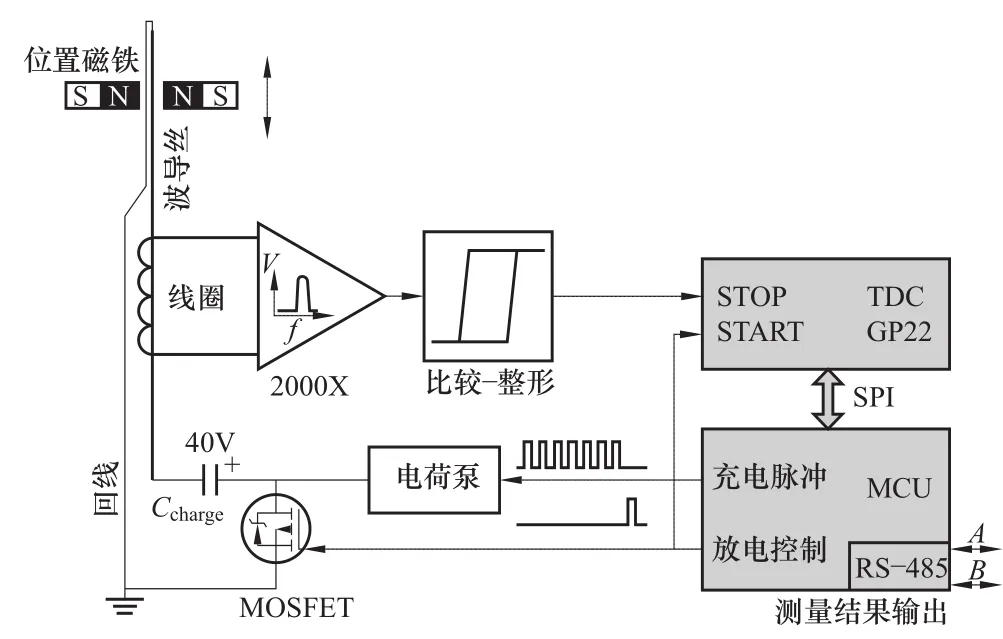
圖3 磁致伸縮位移傳感器測量電路原理圖Fig.3 Schematic of magnetostrictive displacement sensor
4 軟件設計
磁致伸縮位移傳感器測量程序流程如圖4所示。測量電路上電后,MCU首先通過SPI總線完成對TDC芯片GP22的初始化設置。完成初始化后,MCU通過數字I/O向電荷泵電路輸出充電脈沖(Charge Pulse),在幾萬個充電周期后,充電電容Ccharge兩端的電壓約可達到36V以上。完成充電過程后,MCU給出脈寬的放電脈沖信號(Discharge Pulse),放電脈沖信號亦用作GP22時間測量的開始信號進入START端。放電控制場效應管在接收到放電脈沖信號后對地導通,將充電電容上儲存的電量加載到波導絲上,產生瞬間問詢電流脈沖。問詢電流脈沖在波導絲上產生環向磁場,沿波導絲以電磁波波速向前傳播,與位置磁鐵的軸向磁場相互作用,在波導絲中產生應變脈沖,應變脈沖以機械波速在波導絲中傳播,傳播至同軸線圈處時產生感應電壓。感應電壓通過儀表放大器進行放大,再由雙運放構成的帶通濾波器進行放大,放大后的回波信號峰值為1.5~3V。放大后的回波信號再經過高速比較器與施密特觸發器以整形成陡峭的脈沖信號作為時間測量終止信號。時間測量終止信號進入時間測量芯片進行測量。為了消除問詢電流脈沖在線圈處產生的干擾,MCU設定延時后再接收回波脈沖信號。在獲取時間測量結果后,MCU將時間測量結果乘以標定系數作為位移測量結果,通過串行通信接口,經由RS485芯片MAX3741向外發送。為了消除液面抖動對測值的影響,軟件中加入了濾波算法。
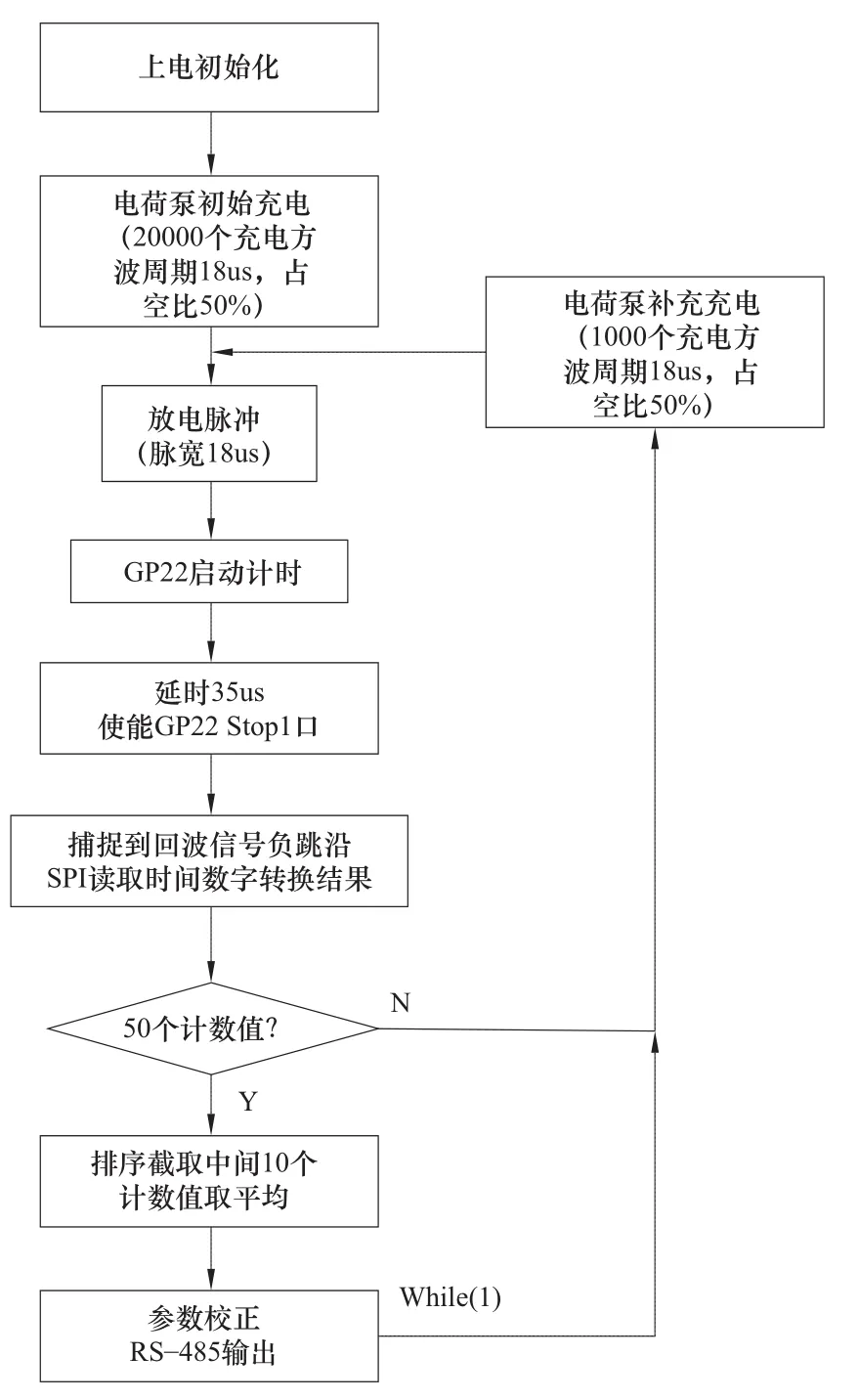
圖4 測量程序流程圖Fig.4 Flowchart of measurement program
5 技術指標
(1)測量范圍:0~1000mm;
(2)示值誤差:≤±0.1%FS;
(3)重復性:≤±0.02%FS;
(4)回差:≤ 0.02%FS;
(5)環境溫度:-25℃~+55℃
6 試驗
6.1 性能試驗
對自行設計的兩臺儀器進行了性能測試,依次將儀器安裝在標定架上,位置磁鐵固定在移動平臺上,通過移動移動平臺使位置磁鐵隨之運動,每100mm一個擋位,每只儀器進行3個正返程測量,記錄數據如表1~表4所示。
從表1、表2的數據可知:試驗數據分別對示值誤差、重復性誤差和回差進行了考核,其性能指標如表5所示。

表1 1號儀器測試數據Tab.1 Test data of the fist instrument
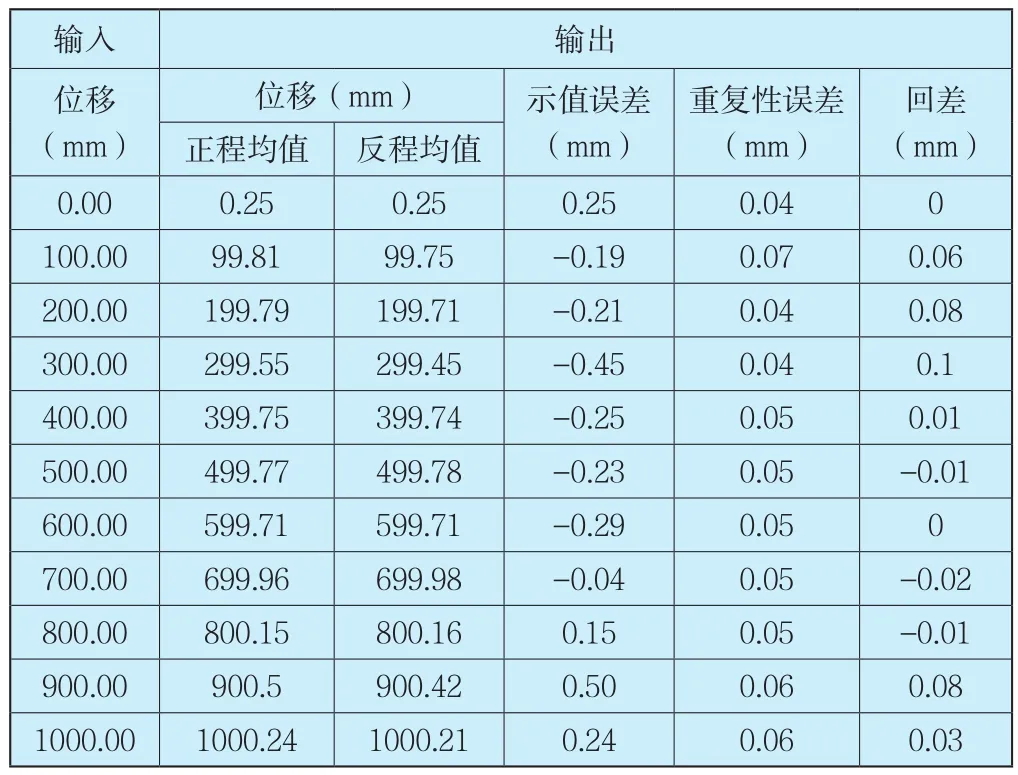
表2 1號儀器數據分析Tab.2 Data analysis of the fist instrument

表3 2號儀器測試數據Tab.3 Test data of the second instrument
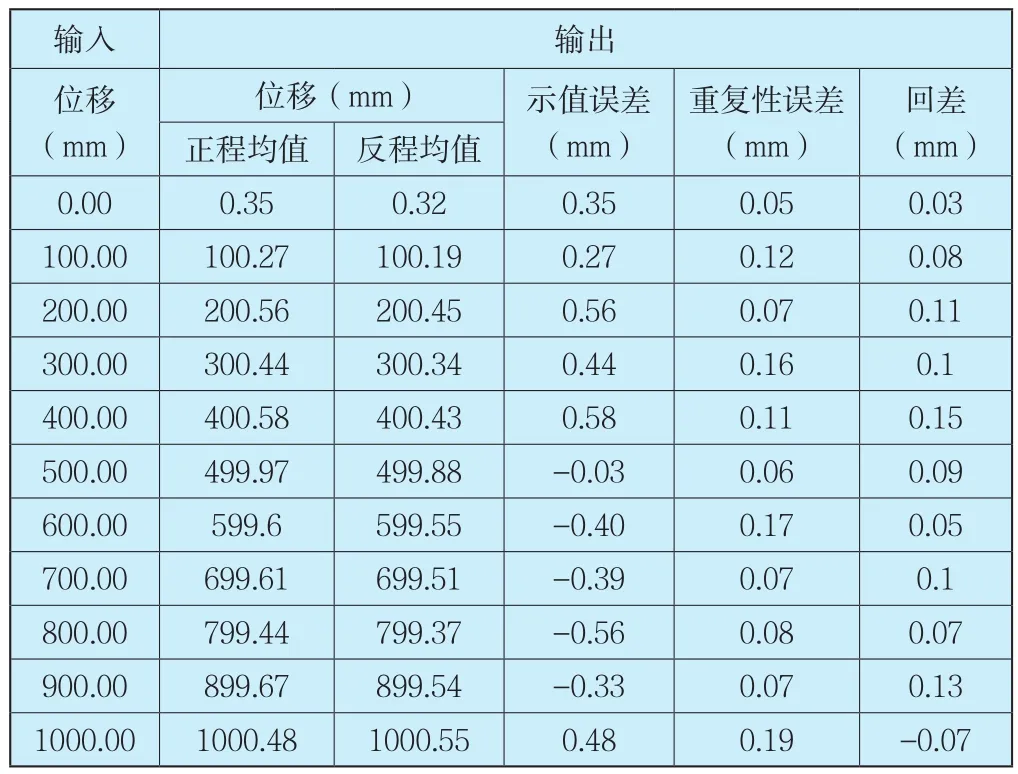
表4 2號儀器數據分析Tab.4 Data analysis of the second instrument
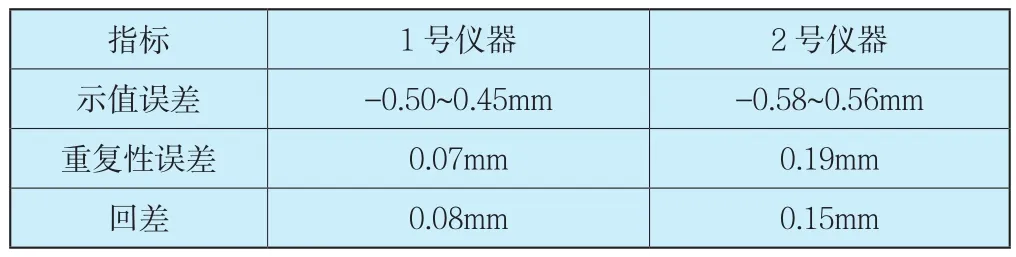
表5 1、2號儀器性能指標總結Tab.5 Summary of performance indicators for the two instrument
由試驗數據可知,在測量范圍內,儀器的示值誤差、重復性誤差、回差均在儀器設計要求范圍之內。
6.2 穩定性試驗
試驗條件,在大氣條件下,夜晚溫度較低為5℃左右,白天房間開有空調,溫度較高為25℃左右,溫度變化范圍為20℃左右。
將儀器與位置磁鐵同時固定在一試驗平臺上,保證兩者之間不出現相對移動,通過RS485通信線與電腦連接,接通電源,1號儀器拷機時間為2015/03/17~2015/3/26,歷時9天,2號儀器拷機時間為2015/03/18~2015/3/26,歷時8天,測量頻率均為1h/次,試驗數據如圖5、圖6所示。
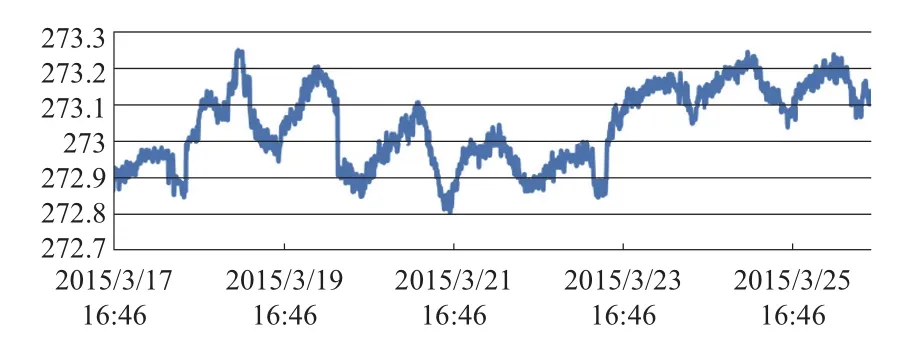
圖5 1號樣機穩定性試驗數據曲線圖Fig.5 Diagram of stability test data of the first instrument
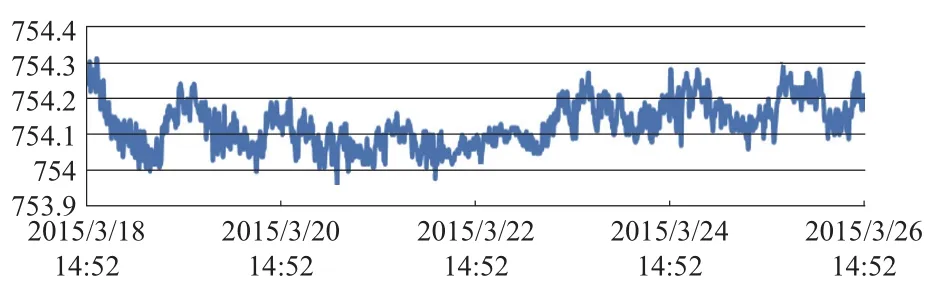
圖6 2號樣機穩定性試驗數據曲線圖Fig.6 Diagram of stability test data of the second instrument
從圖5、圖6的試驗數據可知,通過對儀器進行長時間試驗測試,即使在溫度變化20℃左右的環境下,1號樣機變化了0.45mm,2號樣機變化了0.35mm,且兩臺樣機均成周期性變化,由此可得儀器穩定性良好。
7 結束語
本文基于磁致伸縮原理設計實現了位移傳感器,該位移傳感器采用時間數字轉換芯片進行回波信號的時間測量,顯著提高了傳感器測量分辨率。此外,傳感器還通過特殊的結構設計,提高了測量性能。實驗結果表明,本文設計的磁致伸縮位移傳感器具有測量精度高、穩定性好、回差小等優點,可滿足水利水電行業位移測量需求。
[1]吳蕊.磁致伸縮位移傳感器[D].南京:南京理工大學,2011.
WU Rui. Magnetostrictive Displacement Sensor[D]. Nanjing University of Science and Technology,2011.
[2]李春楠,盧云,蘭中文,楊邦朝.磁致伸縮位移傳感器的研究進展[J].實驗科學與技術,2008,1(6):10-12.
LI Chunnan,LU Yun,LAN Zhongwen,YANG Bangchao.Research progress of magnetostrictive displacement sensor[J].Experimental science and technology,2008,1(6):10-12.
[3]孫君文,李懷洲,潘日敏,楊永才.磁致伸縮位移傳感器的研制[J]. 儀表技術與傳感器,2006,6:1-5.
SUN Junwen,LI Haizhou,PAN Rimin,YANG Yongcai,.Development of magnetostrictive displacement sensor [J].Instrument technology and sensor,2006,6:1-5.
[4]徐國華,宋書鋒,呂瑜.基于PIC單片機和TDC芯片的智能化磁致伸縮位移傳感器[J].儀表技術與傳感器,2004,5:34-36.
XU Guohua,SONG Shufeng,LV Yu. Intelligent magnetostrictive displacement sensor based on PIC MCU and TDC chip[J].Instrument technology and sensor,2004,5:34-36.
李學勝(1979—),男,工程師,主要研究方向:安全監測儀器的設計研發。E-mail:lixuesheng@sgepri.sgcc.com.cn
猜你喜歡
當代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21