磁流變Stewart隔振平臺(tái)H∞半主動(dòng)控制研究
2018-03-09 01:02:14潘忠文廉永正曾耀祥陳照波
宇航總體技術(shù) 2018年1期
王 檑,潘忠文,廉永正,曾耀祥,陳照波
(1. 北京宇航系統(tǒng)工程研究所,北京 100076;2. 哈爾濱工業(yè)大學(xué)機(jī)電工程學(xué)院,哈爾濱 150001)
0 引言
在衛(wèi)星的整個(gè)壽命周期內(nèi),發(fā)射過程中衛(wèi)星經(jīng)受的振動(dòng)環(huán)境最為惡劣,這期間衛(wèi)星要經(jīng)受各種不同形態(tài)的準(zhǔn)靜態(tài)載荷及時(shí)變動(dòng)載荷的作用。惡劣的振動(dòng)環(huán)境往往是衛(wèi)星發(fā)射失敗的主要原因。在不改變衛(wèi)星結(jié)構(gòu)的前提下,在錐殼適配器與衛(wèi)星之間加入Stewart六桿隔振平臺(tái),以減小衛(wèi)星發(fā)射過程中所承受的振動(dòng)環(huán)境和動(dòng)載荷,能有效降低對(duì)衛(wèi)星及其設(shè)備的動(dòng)態(tài)性能的要求。
隔振平臺(tái)采用磁流變阻尼器作為半主動(dòng)控制器件,由于磁流變阻尼器所需能量少,具有較大的阻尼力調(diào)節(jié)范圍,目前已經(jīng)在航空、船舶、機(jī)械和土木工程等領(lǐng)域取得了一定的應(yīng)用[1-4]。同時(shí),國(guó)內(nèi)外對(duì)基于磁流變阻尼器的整星隔振平臺(tái)做了相關(guān)研究工作[5-7]。仿真與試驗(yàn)結(jié)果表明,半主動(dòng)隔振平臺(tái)可以取得較好的低頻隔振效果。對(duì)磁流變阻尼器系統(tǒng)控制一般采用雙層控制策略,即分為外層控制和內(nèi)層控制:外層控制根據(jù)系統(tǒng)模型的特征得到期望阻尼力,使系統(tǒng)控制效果滿足要求,外層控制器不需要考慮執(zhí)行機(jī)構(gòu)的執(zhí)行能力,即按照主動(dòng)控制的方式進(jìn)行計(jì)算,外層控制算法主要包括天棚控制算法、最優(yōu)控制、自適應(yīng)控制、智能控制等[8-9];內(nèi)層控制算法的作用是使磁流變阻尼器的輸出阻尼力快速跟蹤期望阻尼力,但是由于磁流變阻尼器能夠提供的阻尼力方向與激勵(lì)性質(zhì)相關(guān),并不完全依賴輸入電流,因而實(shí)際阻尼力并不能完全跟蹤期望阻尼力,內(nèi)層控制算法主要有開關(guān)控制、神經(jīng)網(wǎng)絡(luò)控制、模糊控制等[10-11]。針對(duì)我國(guó)運(yùn)載火箭星箭界面振動(dòng)環(huán)境在特定頻段振動(dòng)量級(jí)較大的特點(diǎn),本文采用H∞控制方法[12-14],并設(shè)計(jì)新型半主動(dòng)控制策略,對(duì)特定頻段振動(dòng)進(jìn)行重點(diǎn)衰減,設(shè)計(jì)控制算法,建立整星隔振平臺(tái)模型,并通過仿真驗(yàn)證了該方法的有效性。
1 整星隔振平臺(tái)動(dòng)力學(xué)模型
采用Stewart平臺(tái)設(shè)計(jì)整星隔振平臺(tái),如圖1(a)所示,隔振平臺(tái)的上、下平臺(tái)分別與負(fù)載和基礎(chǔ)相連。為了保證平臺(tái)結(jié)構(gòu)的對(duì)稱以及便于裝配時(shí)的精確調(diào)整,將上、下平臺(tái)板設(shè)計(jì)為圓環(huán)形。支腿的上、下球鉸通過球鉸座與上下平臺(tái)相連。支腿結(jié)構(gòu)如圖1(b)所示,支腿集成了磁流變阻尼器和彈簧,起到彈性支撐和阻尼作用。同時(shí)為滿足實(shí)時(shí)控制的需要,支腿上安裝了位移傳感器和拉壓力傳感器。磁流變阻尼器置于彈簧內(nèi),與彈簧并聯(lián)。彈簧選用圓截面螺旋彈簧,置于上、下?lián)醢逯g,上擋板通過軸套與上球鉸相連,下?lián)醢迮c螺桿相連,旋轉(zhuǎn)螺桿可以調(diào)節(jié)整根支腿的長(zhǎng)度。位移傳感器通過夾具與上軸套固連。拉壓力傳感器與磁流變阻尼器通過軸套串接。位移傳感器實(shí)測(cè)磁流變阻尼器的位移量,拉壓力傳感器實(shí)測(cè)磁流變阻尼器的拉壓力。
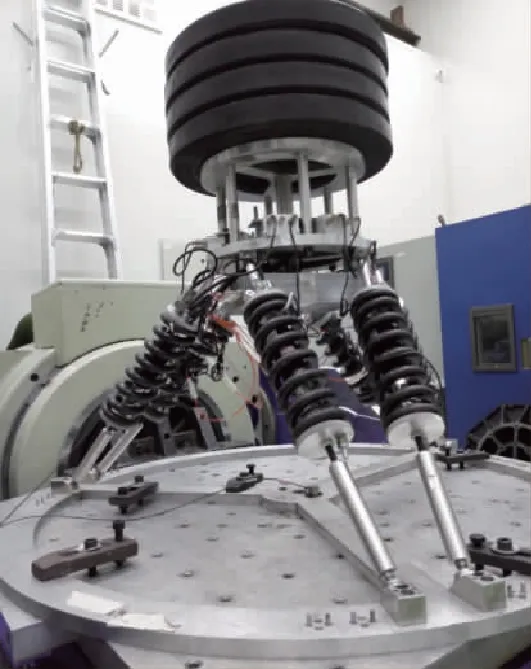
(a) 平臺(tái)結(jié)構(gòu)

(b) 支腿結(jié)構(gòu)圖1 整星隔振平臺(tái)Fig.1 Whole-spacecraft vibration isolation platform
磁流變阻尼器選用lord公司的rd-8040-1型阻尼器,為單出桿剪切閥式,出桿行程55mm,最大輸入電流2A。阻尼器結(jié)構(gòu)如圖2所示,磁流變阻尼器的工作原理為:通過控制輸入電流,勵(lì)磁線圈產(chǎn)生磁場(chǎng),磁流變液在不同磁場(chǎng)環(huán)境下具有不同的表觀黏度,當(dāng)活塞桿與缸體之間相對(duì)運(yùn)動(dòng)時(shí),磁流變液在兩個(gè)腔體間流動(dòng),產(chǎn)生阻礙相對(duì)運(yùn)動(dòng)的阻尼力。

圖2 阻尼器結(jié)構(gòu)Fig.2 Damper structure
對(duì)整星隔振平臺(tái)建立動(dòng)力學(xué)模型,如圖3(a)所示,將星箭連接界面(上平臺(tái))和基礎(chǔ)簡(jiǎn)化為剛體,即具有平動(dòng)和轉(zhuǎn)動(dòng)共6個(gè)自由度。定義B和P分別為基礎(chǔ)固連坐標(biāo)系和上平臺(tái)固連坐標(biāo)系,P系原點(diǎn)選取為上平臺(tái)質(zhì)心位置xp,B系原點(diǎn)選取為下平臺(tái)中心xB,U為慣性坐標(biāo)系。為方便矢量運(yùn)算轉(zhuǎn)為矩陣計(jì)算,選取U、B和P3個(gè)坐標(biāo)系的坐標(biāo)軸方向相同,支腿兩端的編號(hào)與坐標(biāo)軸方向如圖3(b)所示。對(duì)于位置、速度和加速度向量,其左上角的符號(hào)表示參考坐標(biāo)系,對(duì)于未標(biāo)明范圍的物理量和坐標(biāo)系下標(biāo)i,其范圍為1~6,對(duì)應(yīng)6根支桿。

(a) 簡(jiǎn)化平臺(tái)
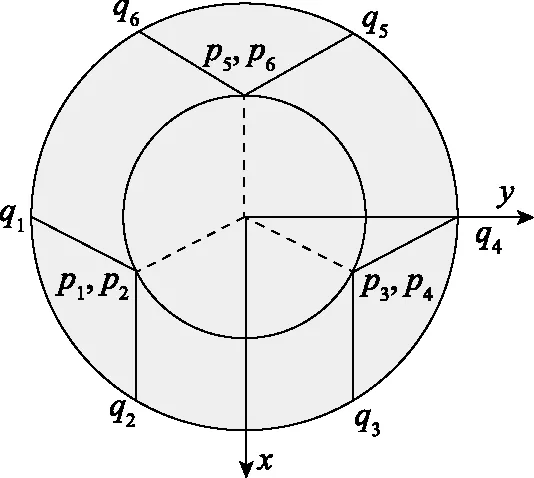
(b)坐標(biāo)系定義圖3 平臺(tái)空間構(gòu)型Fig.3 Spatial configuration of platform
支腿兩端采用球鉸與上平臺(tái)和基礎(chǔ)相連,將支腿簡(jiǎn)化為上部質(zhì)量和下部質(zhì)量,以及連接上下部質(zhì)量的彈簧和磁流變阻尼器,考慮上下兩部分轉(zhuǎn)動(dòng)慣量,定義支桿固連坐標(biāo)系Zi(i=1~6) ,原點(diǎn)位于qi,xi軸沿支桿方向指向pi,xi、yi、zi構(gòu)成右手系,支腿各部分符號(hào)定義如圖4所示。

圖4 支腿動(dòng)力學(xué)模型簡(jiǎn)化圖Fig.4 Simplified outrigger dynamic model
劉麗坤等[15]提出了多桿被動(dòng)減振平臺(tái)的建模方法,在此基礎(chǔ)上,增加磁流變阻尼力,對(duì)相關(guān)環(huán)節(jié)進(jìn)行改進(jìn)和修正,建立平臺(tái)動(dòng)力學(xué)模型。本文對(duì)相關(guān)推導(dǎo)進(jìn)行簡(jiǎn)化和省略,詳細(xì)推導(dǎo)過程參考文獻(xiàn)[15]。
1.1 平臺(tái)運(yùn)動(dòng)學(xué)方程
支桿矢量wi的角速度和角加速度為:
(UωP×Ppi)-ui×(UωB×Bqi)]/li
(1)
(2)

支桿上部分質(zhì)量在慣性空間的加速度aui為:

ui·UvB-Bqi×ui·UωB)ui+c2
(3)
1.2 平臺(tái)動(dòng)力學(xué)方程
上平臺(tái)的牛頓-歐拉方程為:
(4)
(5)
式中,F(xiàn)si為上平臺(tái)對(duì)支桿作用力,fe、Me為衛(wèi)星對(duì)上平臺(tái)的力和力矩,mp、Ip為上平臺(tái)的質(zhì)量和轉(zhuǎn)動(dòng)慣量,ap、εp為上平臺(tái)加速度和角加速度。
根據(jù)小幅振動(dòng)分析,假定平臺(tái)構(gòu)型近似不變,2階小量可以忽略不計(jì),同時(shí)支桿長(zhǎng)度變化量可以表示為平動(dòng)和轉(zhuǎn)動(dòng)引起的變化量之和:
li-lri=ui·(UxP-UxP0)+Ppi×ui·θP-ui·(UxB-UxB0)-Bqi×ui·θB
(6)
式中,lri為支桿靜長(zhǎng)度,UxP0和UxB0為UxP和UxB的初始位置,θP和θB為上平臺(tái)和基礎(chǔ)繞P系和B系的卡爾丹角,在小幅振動(dòng)時(shí),有下列近似關(guān)系:
(7)

因?yàn)閁、P、B和Hi坐標(biāo)系三軸方向均相同,整理可以得到矩陣形式的平臺(tái)線性化動(dòng)力學(xué)方程為:
(8)



式中:




A5i=kidiag(ui)E3(ui′)
A7i=-kidiag(ui)E3[(ui)′]
2 主動(dòng)控制算法


圖5 H∞控制系統(tǒng)框圖Fig.5 H∞ control system

(9)
狀態(tài)空間實(shí)現(xiàn)為:

(10)
記為:

G=
系統(tǒng)傳遞函數(shù)與狀態(tài)矩陣的關(guān)系為:
Gij=Ci(sI-A)-1Bj+Diji,j=1,2
(11)
從干擾輸入w到輸出z的傳遞函數(shù)Tzw為:
Tzw(s)=G11+G12K(I-G22K)-1G21=Fl(G,K)
(12)
通過求解兩個(gè)Riccati方程可以得到控制器K(s),使閉環(huán)控制系統(tǒng)穩(wěn)定,并且使得:
(13)
控制器K(s)的狀態(tài)空間表達(dá)為:
(14)
記為:

K=
3 半主動(dòng)控制算法

(15)
為設(shè)計(jì)半主動(dòng)控制算法,需建立阻尼器力學(xué)模型,來表征阻尼器力學(xué)特性。常用數(shù)學(xué)模型有參數(shù)化模型和非參數(shù)化模型,參數(shù)化模型采用不同形式的數(shù)學(xué)函數(shù)或微分方程表征阻尼力-位移、力-速度滯回特性,非參數(shù)模型一般為神經(jīng)網(wǎng)絡(luò)模型。參數(shù)化模型中比較常用的有sigmoid模型[16]和雙曲正切模型[17],分別采用sigmoid函數(shù)和雙曲正切函數(shù)進(jìn)行曲線擬合。半主動(dòng)控制算法中較為經(jīng)典的為spencer提出的開關(guān)控制[18],當(dāng)期望阻尼力和實(shí)際阻尼力方向相同且實(shí)際阻尼力小于期望阻尼力時(shí),輸出最大電流,其他情況輸出電流為0,如圖6所示。由于開關(guān)控制電流在0和最大值之間切換,造成控制力跳變,會(huì)對(duì)控制對(duì)象產(chǎn)生一定沖擊作用。為減少控制力大幅度變化,改進(jìn)開關(guān)控制算法,當(dāng)實(shí)際阻尼力和期望阻尼力同方向時(shí),采用過去N個(gè)采樣時(shí)刻期望阻尼力的最大值和當(dāng)前時(shí)刻阻尼力的加權(quán)平均與阻尼器能提供最大阻尼力之比作為控制電流,當(dāng)反向時(shí),控制輸入電流為零,如圖7所示,表達(dá)式為:
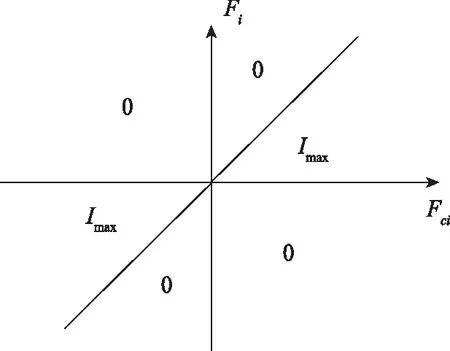
圖6 開關(guān)控制算法Fig.6 On-off control algorithm
(16)

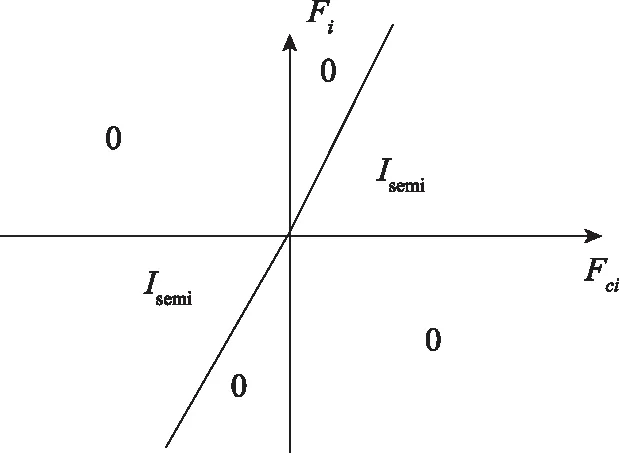
圖7 改進(jìn)半主動(dòng)控制算法Fig.7 Improved semi-active control algorithm
4 仿真分析
合理選擇平臺(tái)參數(shù),滿足縱向和橫向剛度要求,平臺(tái)高度為0.485m,上下平臺(tái)半徑分別為0.432m和0.834m,支腿長(zhǎng)度為0.7m,支腿上下兩部分質(zhì)量均為2kg,彈簧剛度為5×106N/m。將衛(wèi)星簡(jiǎn)化為剛體,質(zhì)量為1200kg,在P系中轉(zhuǎn)動(dòng)慣量為Ixx=Iyy=3700kg·m2,Izz=500kg·m2,Ixy=Iyz=Izx=0。由于我國(guó)CZ-2C系列、CZ-3C等型號(hào)星箭界面低頻振動(dòng)環(huán)境問題較為突出,如CZ-2C系列火箭40Hz振動(dòng)放大現(xiàn)象,故以縱向振動(dòng)40Hz為例,對(duì)平臺(tái)上下端面?zhèn)鬟f率在特定頻段進(jìn)行重點(diǎn)衰減,選擇加權(quán)函數(shù)為:


wp和wu幅頻曲線如圖8和圖9所示。wp在40Hz處存在峰值,以增大z中40Hz頻率范圍內(nèi)的比重;wu在40Hz處存在最小值,以較少對(duì)控制量u中40Hz分量的約束,增強(qiáng)控制量u在該頻率段內(nèi)的控制作用。
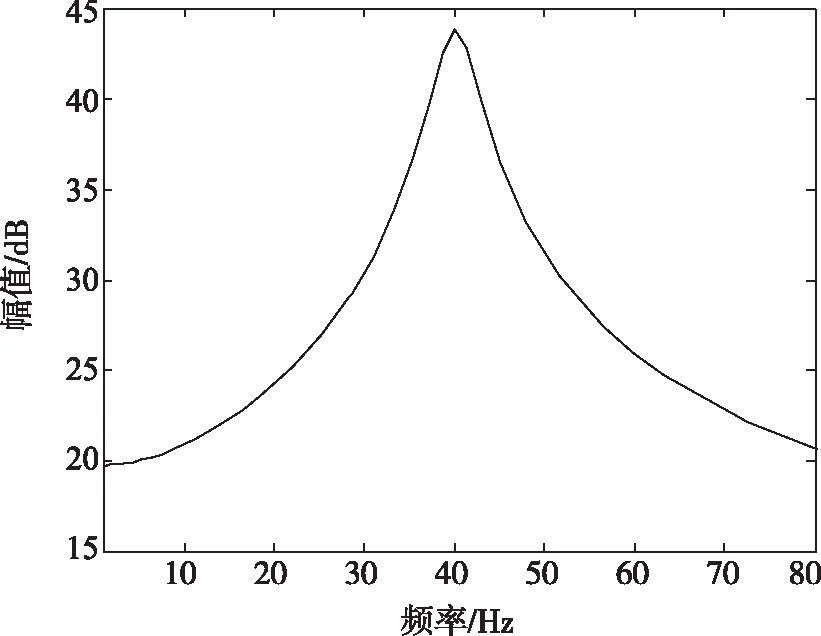
圖8 wp幅頻曲線Fig.8 wp amplitude frequency curve
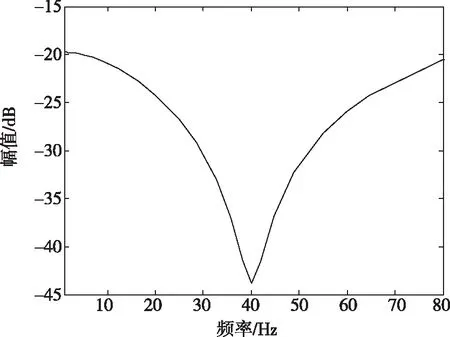
圖9 wu幅頻曲線Fig.9 wu amplitude frequency curve
計(jì)算得到控制器K為6自由度狀態(tài)空間方程,輸入為XP,輸出為Fc,其縱向位移-輸出力幅頻與相頻曲線如圖10所示。
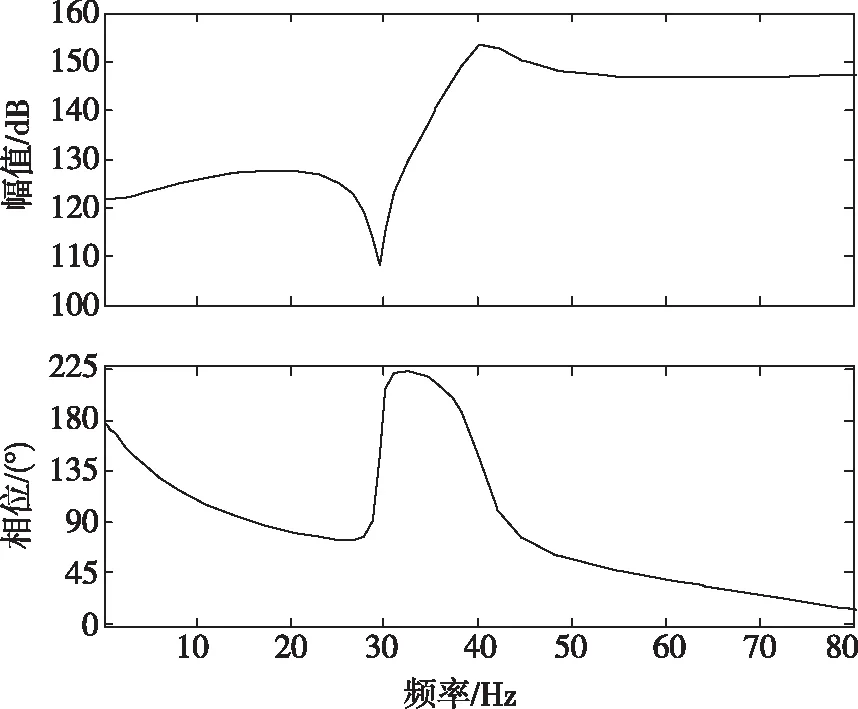
圖10 控制器幅頻與相頻曲線Fig.10 Controller amplitude and phase frenquency curve

(17)

以下平臺(tái)縱向振動(dòng)位移xbz為輸入,上平臺(tái)縱向振動(dòng)位移xpz為輸出,考察縱向位移傳遞率在不同控制作用下的變化情況。縱向傳遞率T(s)為:
(18)
主動(dòng)控制縱向振動(dòng)傳遞率如圖11所示,可以看出,采用H∞主動(dòng)控制,相對(duì)被動(dòng)阻尼和天棚阻尼控制算法,可以使傳遞率在40Hz和共振峰處均具有很大幅度的衰減,但在0~10Hz處振動(dòng)有少量放大。在H∞主動(dòng)控制基礎(chǔ)上,增加理想半主動(dòng)約束,縱向傳遞率在40Hz處的衰減作用減小,但仍然具有較好的衰減效果,同時(shí)在0~10Hz處無放大現(xiàn)象。

圖11 主動(dòng)控制與理想半主動(dòng)控制縱向傳遞率Fig.11 Active control and ideal semi-activecontrol longitudinal transmissibility

圖12 半主動(dòng)控制算法縱向傳遞率Fig.12 Semi-active control longitudinal transmissibility

圖13 半主動(dòng)算法控制電流Fig.13 Semi-active control current

圖14 半主動(dòng)控制阻尼力Fig.14 Semi-active control force
分別采用開關(guān)控制和改進(jìn)半主動(dòng)控制算法,對(duì)期望阻尼力進(jìn)行跟蹤,縱向傳遞率如圖12所示,可以看出,與理想半主動(dòng)約束相比,采用半主動(dòng)控制算法后,低頻(0~55Hz)控制效果變差,共振峰與40Hz處傳遞率均增大,相對(duì)天棚控制在40Hz處依然具有較小的傳遞率;但在較高頻段(55Hz~80Hz),傳遞率小幅降低,與天棚控制相當(dāng)。改進(jìn)半主動(dòng)控制與開關(guān)控制輸出電流和阻尼力如圖13和圖14所示,采用改進(jìn)半主動(dòng)控制后,電流變化范圍減小同時(shí)不會(huì)出現(xiàn)電流突變的情況,因而阻尼力沒有大幅度跳變。同時(shí)從縱向傳遞率可以看出,改進(jìn)半主動(dòng)控減小了在0~5Hz傳遞率的波動(dòng),同時(shí)共振峰和40Hz處減振效果均有明顯改善。
5 結(jié)論
采用牛頓-歐拉法建立磁流變整星減振平臺(tái)動(dòng)力學(xué)模型,并設(shè)計(jì)H∞主動(dòng)控制算法,通過選擇合適的加權(quán)函數(shù),降低星箭界面特定頻段振動(dòng),能夠獲得較好的控制效果。改進(jìn)開關(guān)半主動(dòng)控制算法,提出的改進(jìn)半主動(dòng)控制算法可以減小阻尼力大幅度跳變,改善阻尼力跟蹤效果。上述方法可以有效改善星箭界面力學(xué)環(huán)境,具有重要的理論與工程意義。
[1] 王唯,夏品奇.采用磁流變阻尼器的直升機(jī)“地面共振”分析[J]. 南京航空航天大學(xué)學(xué)報(bào),2003,35(3):264-267.
[2] 周云,吳志遠(yuǎn),梁興文. 磁流變阻尼器對(duì)高層建筑風(fēng)振的半主動(dòng)控制[J]. 地震工程與工程振動(dòng),2001,21(4):159-162.
[3] 王锎,何立東, 邢健,等. 磁流變阻尼器控制雙跨轉(zhuǎn)子軸系振動(dòng)研究[J]. 振動(dòng)與沖擊, 2015,34(2):150-153.
[4] 夏兆旺,袁秋玲,茅凱杰,等. 船舶輔機(jī)單層半主動(dòng)非線性隔振系統(tǒng)振動(dòng)特性分析[J]. 船舶力學(xué), 2017, 21(1):69-75.
[5] 涂奉臣. 基于磁流變阻尼器的整星半主動(dòng)隔振技術(shù)研究[D]. 哈爾濱: 哈爾濱工業(yè)大學(xué),2010.
[6] Jean P, Ohayon R, Bihan D L. Semi-active control using magneto-rheological dampers for payload launch vibration isolation[C].SPIE Symposium on Smart Structures and Materials. 2006, 6169: 61690H.
[7] 程明, 陳照波, 楊樹濤, 等. 應(yīng)用磁流變技術(shù)的星箭界面半主動(dòng)隔振研究[J]. 振動(dòng)工程學(xué)報(bào), 2017, 30(1): 86-92.
[8] 李忠獻(xiàn),徐龍河. 新型磁流變阻尼器及半主動(dòng)控制理論設(shè)計(jì)[M].北京:科學(xué)出版社,2012: 134-203.
[9] 吳忠強(qiáng),鄺鈺. 汽車磁流變半主動(dòng)懸架反步自適應(yīng)控制研究[J]. 機(jī)械設(shè)計(jì), 2010, 27(4): 25-28.
[10] Spencer Jr B F, Dyke S J, Sain M K, et al. Phenomenological model for magnetorheological dampers[J].Journal of Engineering Mechanics, 1997, 123(3): 230-238.
[11] 廖英英,劉永強(qiáng) , 劉金喜. 磁流變阻尼器的神經(jīng)網(wǎng)絡(luò)建模及在半主動(dòng)控制中的應(yīng)用[J]. 北京交通大學(xué)學(xué)報(bào),2011,35(6): 67-71.
[12] 張志勇,劉鑫,黃彩霞,等.具有參數(shù)不確定性的車輛座椅懸架H∞輸出反饋半主動(dòng)控制[J]. 振動(dòng)與沖擊, 2013, 32(14):93-97
[13] 吳敏, 何勇, 佘錦華.魯棒控制理論[M]. 北京:高等教育出版社, 2010.
[14] Chida Y, Ishihara Y, Okina T, et al. Identification and frequency shaping control of a vibration isolation system[J]. Control Engineering Practice, 2008, 16(6): 711-723.
[15] 劉麗坤,鄭鋼鐵,黃文虎. 整星被動(dòng)多桿隔振平臺(tái)研究[J]. 應(yīng)用力學(xué)學(xué)報(bào), 2005, 22(3): 329-334.
[16] 李秀領(lǐng),李宏男. 磁流變阻尼器的雙sigmoid模型及試驗(yàn)驗(yàn)證[J]. 振動(dòng)工程學(xué)報(bào),2006, 19(2):168-172.
[17] Kwok N M, Ha Q P, Nguyen T H, et al. A novel hysteretic model for magnetorheological fluid dampers and parameter identification using particle swarm optimization[J]. Sensors and Actuators A: Physical, 2006, 132(2): 441-451.
[18] Spencer Jr B F, Dyke S J, Sain M K, et al. Phenomenological model for magnetorheological dampers[J]. Journal of Engineering Mechanics, 1997, 123(3): 230-238.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:36:28
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
中國(guó)公路(2017年18期)2018-01-23 03:00:38
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03