汽車AEB電子系統開發
2018-03-20 01:44:00孫建興
汽車實用技術 2018年5期
關鍵詞:系統
孫建興
(北京汽車股份有限公司,北京 101300)
引言
由于AEB電子系統極大減少了交通事故率,因此在車輛中得到越來越多的應用,在國際上歐美地區已將AEB配置寫入法規。
AEB電子系統要有良好的可靠性、安全性和舒適性,同時要避免AEB系統的誤觸發和報警帶來的困擾。
由于各公司開發的AEB的控制策略和邏輯各不相同,從保障行人和車輛的安全考慮,需要對AEB電子系統性能進行規定。
1 AEB電子系統介紹
AEB電子系統包括毫米波雷達、視覺系統、處理器,通過汽車CAN網絡與ESP和EMS系統進行通訊。其工作過程包括制動準備、報警、制動輔助。
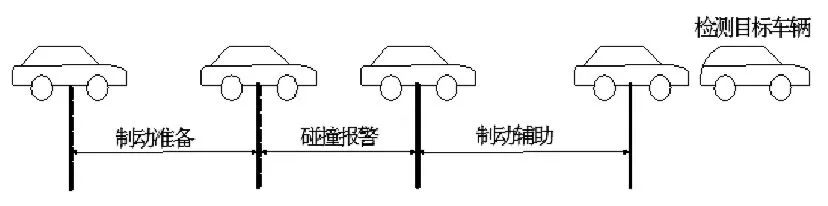
圖1 AEB工作過程示意圖
毫米波雷達主要用于探測前方障礙物距離、速度等參數,不受天氣等環境因素干擾。
視覺系統包括攝像頭和處理器。可用于障礙物圖像識別和分類,也具備探測距離功能。攝像頭受天氣及光線影響較大。
處理器把雷達和攝像頭檢測到的數據進行融合計算分析,根據與前方行人或車輛的碰撞時間和距離,做出控制決策。
2 AEB電子系統控制邏輯
AEB通過視覺系統采集豐富的路況、車況信息,建立圖像數據庫。車輛在行駛過程中,攝像頭采集路況信息,提取圖形,再通過數據庫的比對,進行障礙物的識別。同時,毫米波雷達也對障礙物進行探測。AEB控制邏輯如下圖所示:
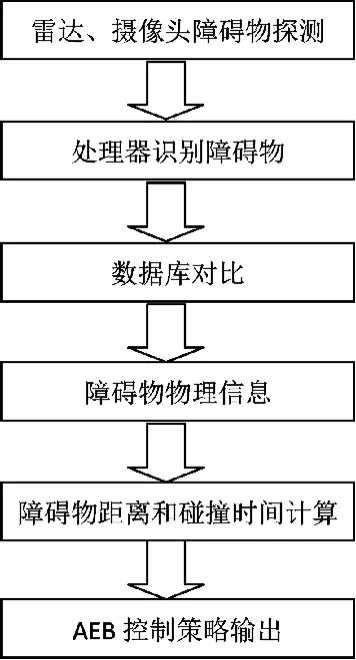
圖2 AEB控制邏輯
中國的路況特別復雜,行人、機動車、非機動車混行的情況較多,由于圖像數據庫的限制,AEB系統仍然不可避免做出誤判或錯誤決策。為解決此問題,有很多企業已經開始研究采用AI深度學習的技術來解決障礙物的識別問題。
3 AEB性能開發
AEB電子系統對前方150m范圍內障礙物進行跟蹤。系統設計盡量減少碰撞預警信號,避免在駕駛員不認為會與前方車輛發生碰撞的情況下自動制動。
3.1 障礙物識別
視覺系統需要建立一個障礙物圖形庫,根據探測的物體外形與圖形庫對比,確定障礙物類型后,再根據系統計算若在碰撞時間內則進行報警或制動。
某車型開發的AEB,在行駛過程中出現頻繁報警,或出現有障礙物未進行主動制動,用戶體驗欠佳。經分析,系統計算模型需優化。
3.1.1 優化前計算模型
原計算模型對前方全部障礙物進行識別,采用冒泡排序法,確定跟蹤目標。當相鄰車道車輛制動時,本車AEB發生報警,非預期報警,需排除。
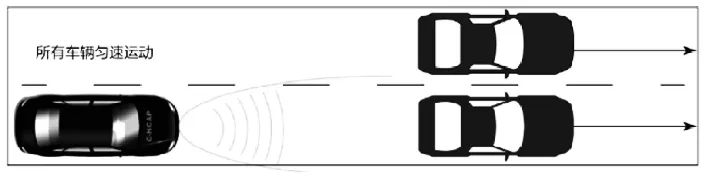
圖3 相鄰車道制動試驗
3.1.2 優化后計算模型
原計算模型不變,增加前方直行距離和側向距離限制條件。本車道外側 0.3m區域內障礙物僅進行跟蹤識別,不進行報警。排除側方車輛干擾。如圖4所示。
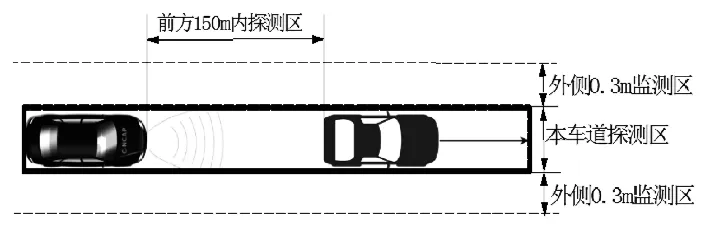
圖4 相鄰車道制動試驗
3.2 AEB功能測試
3.2.1 AEB性能要求
AEB應根據中國駕駛員特性進行算法開發,解決駕駛員感受和緊急制動之間的矛盾。
車輛駕駛者對危險的判斷和TTC(碰撞時間)直接相關,當TTC 3.0s以上時,駕駛者不會感覺到風險存在。在TTC 1.6s以下時,駕駛者會覺得很危險。
安全距離是判定同一車道上本車與前車是否存在碰撞危險的距離值,它包括提示報警距離和主動制動距離。
提示報警距離應保證駕駛員有較充足的反應時間,并能進行正確的操作,在這個階段AEB系統只會報警,不會介入駕駛員操作。
主動制動距離通過計算,可以使汽車解除制動后與前車仍保持1m的距離而不至于與前車碰撞,也可以將碰撞損傷降至最小距離后,系統將跳過駕駛員操作,直接制動車輛。
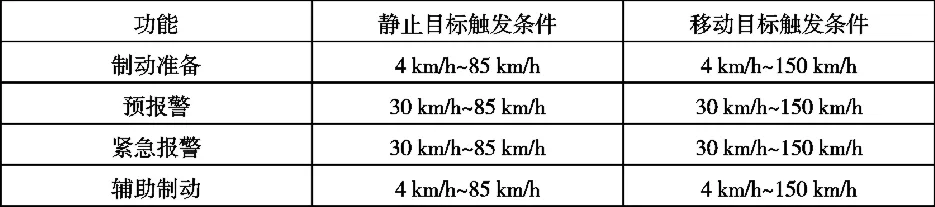
表1 AEB觸發條件
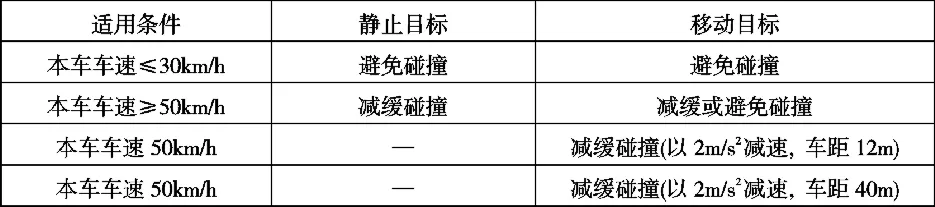
表2 障礙物為車輛的性能要求

表3 障礙物為行人的性能要求
3.2.2 AEB功能測試
(1)AEB車輛追尾測試
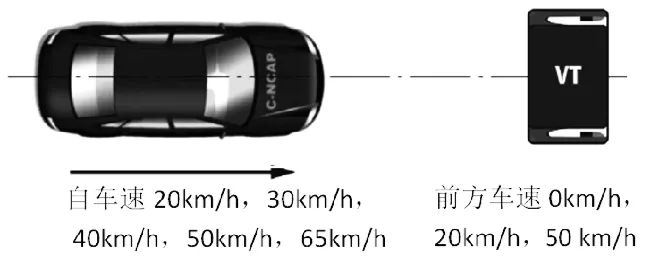
圖5 追尾測試實驗
某車型AEB進行了追尾試驗測試,當前方車速為0km/h時,自車速≤40km/h時,可完全避免碰撞,自車速>40km/h時,減緩碰撞;當前方車速為 20km/h時,自車速≤65km/h時,可完全避免碰撞,自車速>65km/h時,減緩碰撞;當前方車速為以4 m/s2減速時,自車速50km/h時,與前方車距12m時,減緩碰撞,與前方車距40m時,可完全避免碰撞。經測試,碰撞試驗滿足表2規定的性能要求。
(2)AEB誤作用試驗
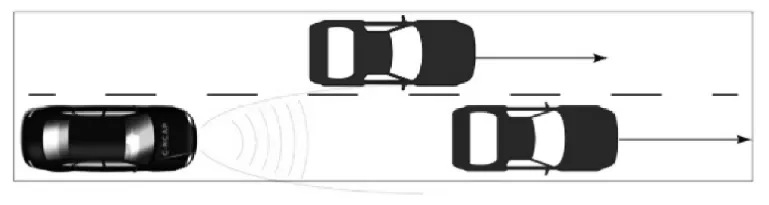
圖6 AEB誤作用試驗
某車型AEB誤作用試驗,當相鄰車道車輛以3 m/s2減速時,AEB系統不觸發,滿足要求。
(3)行人AEB測試

圖7 AEB遠端行人試驗
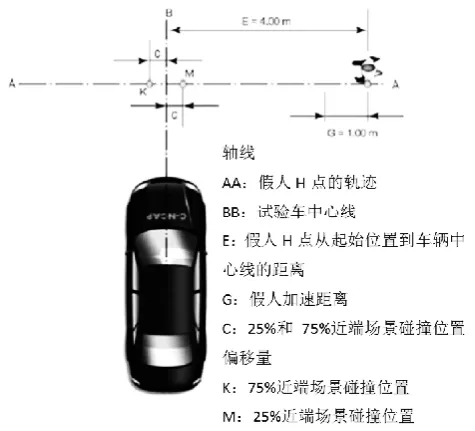
圖8 AEB近端行人試驗
某車型行人AEB測試,從遠端橫穿-25%時,車速30km/h時,避免碰撞,車速 40km/h時減緩碰撞;從遠端橫穿-50%時,車速30km/h時,避免碰撞,車速40km/h時減緩碰撞;從近端橫穿-25%時,車速30km/h時,避免碰撞,車速40km/h時減緩碰撞;從近端橫穿-50%時,車速 30km/h時,避免碰撞,車速40km/h時減緩碰撞。經測試AEB行人碰撞滿足要求。
(4)道路測試
某車型新開發 AEB場內測試合格后,在城市道路進行1000公里測試,和高速公路1000公里測試。通過實際道路測試,進一步檢驗了AEB系統障礙物識別和計算模型。經實際道路測試,某車型新開發AEB無誤報問題,AEB報警和主動剎車介入及時。
3.2.3 測試數據分析
在進行節3.2.2所述測試項目時,需通過測試設備,采集本車速度、本車加速度、ttc時間、兩車相對距離、前車速度,等參數進行分析,以評判AEB的性能。
以本車車速30km/h,前車靜止的工況為例,得到以下分析數據:
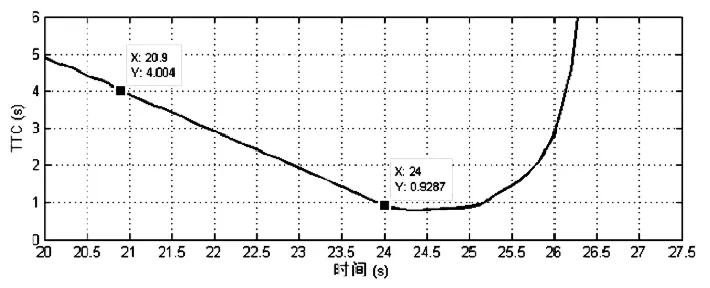
圖9 TTC與時間關系曲線
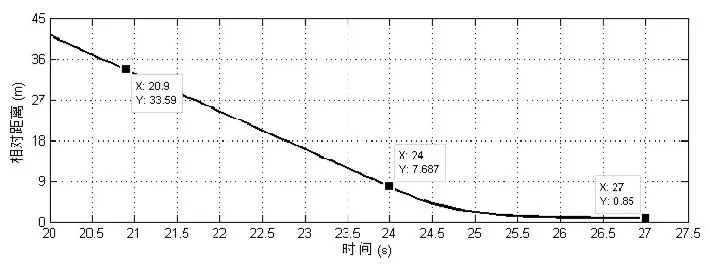
圖10 相對距離與時間關系曲線
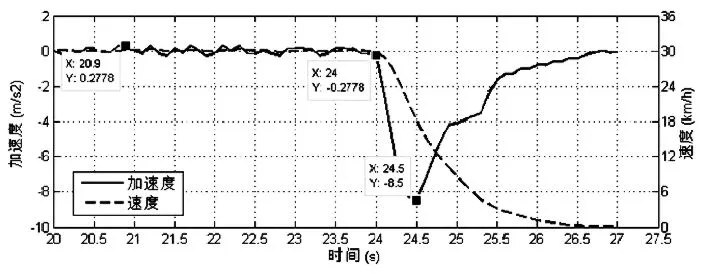
圖11 加速度、速度與時間關系曲線
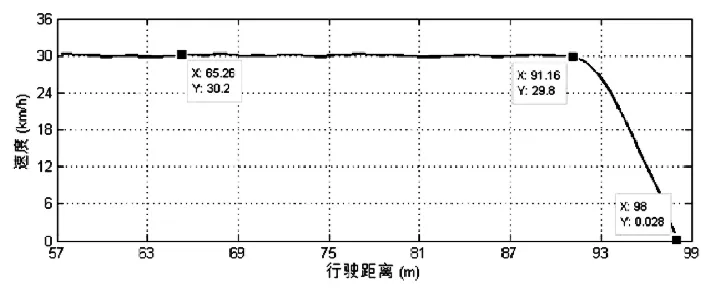
圖12 速度與行駛距離關系曲線
由曲線圖參數可得出以下結論:

表4 CCRs 30試驗結論
由上述結論可知,某車型新開發AEB的該項測試符合要求。
4 結束語
AEB電子系統極大的提高了安全性,已日漸成為車輛的主流配置。未來隨著 AI技術的進步,和毫處理器的技術進步,AEB系統必將進一步提升安全性,減輕建立圖形數據庫的工作量,但是會增加深度學習的計算工作量,對處理器的計算能力要求更高。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
