紅花絲采收機扶禾器升降裝置設計及仿真分析
2018-03-28 00:49:07古樂樂曹衛彬孫胃嶺劉姣娣田東洋
農機化研究 2018年3期
古樂樂,曹衛彬,孫胃嶺,劉姣娣,田東洋,麻 平
(1.石河子大學 機械電氣工程學院,新疆 石河子 832000;2.新疆兵團農業機械推廣站,烏魯木齊 830000)
0 引言
紅花屬雙子葉植物綱、菊科一年生草本植物,是一種集油料、天然色素、飼料、染料和藥材為一體的經濟作物。紅花產生兩大經濟產物種子與紅花花絲,種子收獲已經實現機械化。紅花開花時,紅花花果成傘形分布,花絲主要由人工采摘,采摘周期短、勞動強度大,每年大量鮮花無人采摘。紅花花絲采摘已成為制約紅花經濟發展的決定因素。
目前,國外研制的氣吸式紅花采收機主要針對干紅花,而干花絲內部有效成分大大降低,因此這種機型不適合中國紅花產業的發展[1]。國內研制紅花采收機主要為背負式人工采收,過重的機械裝置,增加采收體力消耗,反而加重紅花絲采收難度。
根據紅花的物料特性,結合國內外相似花類機械化采收思路,提出了一種自走機械式紅花絲收獲機。紅花絲采收的特殊性需要特色的高地隙式拖拉機。紅花花絲采收期,花絲高度受紅花品種、土壤及環境影響較大。這種新型自走機械式紅花絲收獲機,采收部件效率與扶禾器工作效率成正比,扶禾器的工作效率受到扶禾器與紅花植株的相對位置影響,需要一種使扶禾器與紅花植株相對固定的仿形裝置。
1 整機工作原理及機構設計
1.1 工作原理
機械式紅花絲采收機整機采取高地隙拖拉機驅動,通過液壓裝置將動力傳輸給收割裝置;扶禾裝置通過相對紅花花頭轉動與拖拉機相對紅花花頭移動,合成紅花花頭相對梳拔式紅花絲采摘頭的復合運動,原理如圖1所示。轉向裝置通過控制前輪控制方向,扶禾裝置與梳拔式紅花絲采摘頭位于拖拉機機架下方固定架上,通過液壓裝置調節固定架的位置。
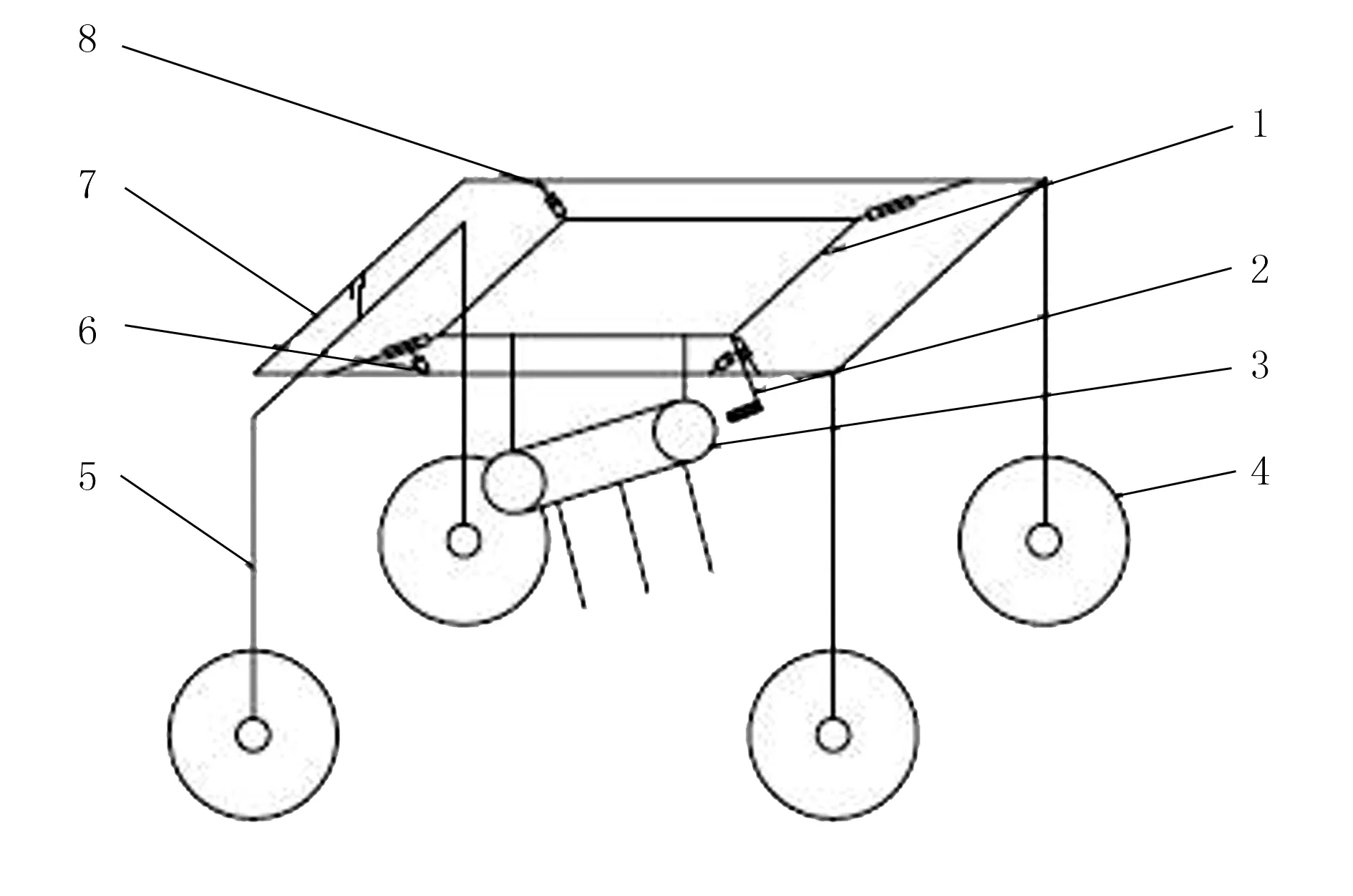
1.固定架 2.梳拔式紅花絲采摘頭 3.扶禾器 4.后輪 5.前輪 6.輔助液壓缸 7.底盤 8.液壓缸 圖1 機械式紅花絲采收機原理圖
1.2 仿形機構
仿形機構由底盤、液壓缸及固定架組成,如圖2所示。底盤為高地隙拖拉機底盤,液壓缸通過鉸鏈分別連接底盤上A、E、F、J4個位置和固定架上C、D、G、H4個位置,通過液壓缸調節固定架上下位置且固定架與底盤保持平行。輔助液壓缸過鉸鏈分別連接底盤上M、N兩個位置和液壓缸上B、I兩個位置。通過輔助液壓缸調節固定架左右位置且固定架與底盤保持平行。
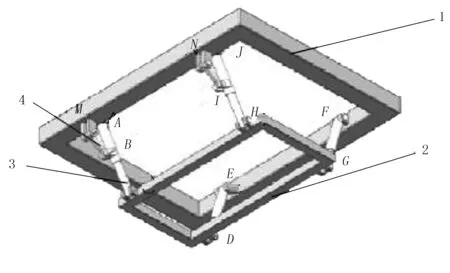
1.底盤 2.固定架 3.液壓缸 4.輔助液壓缸 圖2 仿形機構
2 仿形機構的受力分析
為探究整個裝置的受力與仿形機構施加的作用力之間的關系,現對其受力分析,找出各參數變化的影響[2]。
2.1 縱向仿形時受力分析
紅花花絲高低受到品種、氣候、土壤及其他多種因素影響,工作臺需要上下移動,主要靠4個液壓缸完成運動。當4個液壓缸運動時,驅動固定架上下運動,即扶禾器與梳拔式紅花絲采摘頭同時向下運動。通過液壓缸的調節實現采收不同高度的紅花花絲。對固定架進行受力分析,如圖3所示為仿形機構中固定架受力情況。
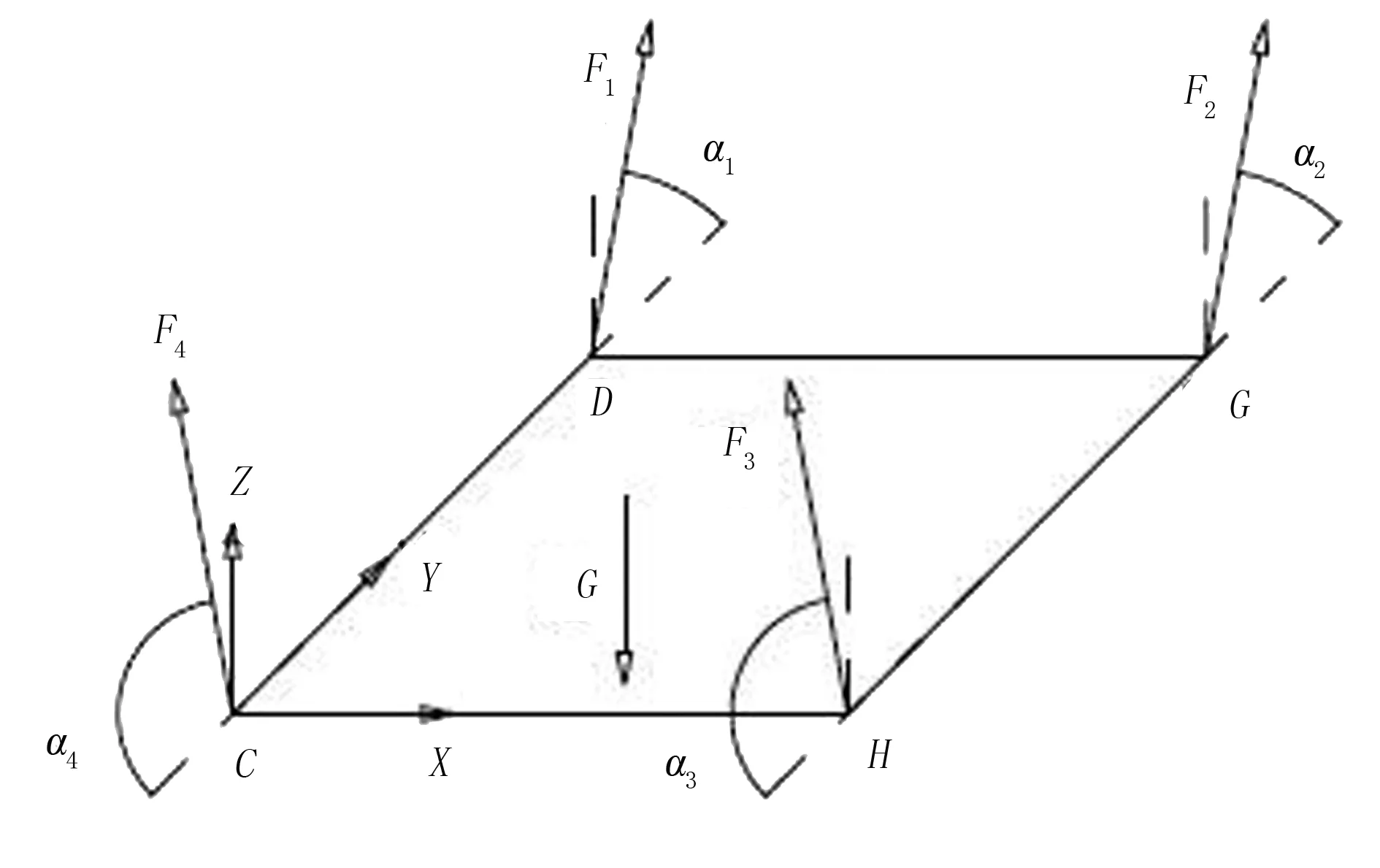
圖3 固定架受力簡圖
由在YZ平面上穩定工作的受力平衡條件可得
(1)
(2)
令固定架CH與DG兩邊長為a,另兩邊長為b,固定架及其所固定機構重心在固定架的中心,由力矩平衡可得:
在xoy平面上F1、F2、F3、F4相對重心力矩為
(3)
由機構的結構圖知,F1=F2,F3=F4,α1=α2,α3=α4,則
(4)
(5)
其中,α1、α2、α3、α4分別為DE、FG、JH、AC液壓缸在運動過程中與Y軸的夾角;F1、F2、F3、F4分別為DE、FG、JH、AC液壓缸在運動過程中對固定架作用的力;G為整個采摘裝置對固定架施加的重力及固定架自身的重力。
由式(4)得:液壓缸所要施加的力F,主要與α、G有關。對于F1與F2,當α1逐漸增大時,F1與F2隨之增大,反之變小;當α3逐漸增大時,F1與F2隨之減小,反之增大;當G逐漸增大時,F1與F2隨之增大,反之變小。由式(5)得:液壓缸所要施加的力F,主要與α、G有關。對于F3與F4,當α3逐漸增大時,F3與F4隨之增大,反之變小;當α1逐漸增大時,F3與F4隨之減小,反之增大;當G逐漸增大時,F3與F4隨之增大,反之變小。
2.2 橫向仿形時受力分析
紅花花絲呈傘狀分布,扶禾器工作效率與紅花植株與扶禾器相對位置有關,工作臺需要左右移動,主要靠輔助液壓缸完成左右移動。對液壓缸AC進行受力分析如圖4所示。
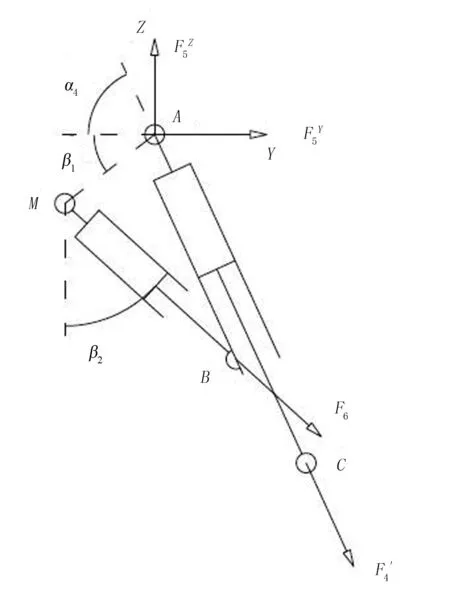
圖4 液壓缸受力簡圖
(6)
(7)
其中,β2為AC液壓缸在底盤固定點與MB液壓缸在底盤固定點與Y軸的夾角。
3 固定架位置與液壓缸長度的分析
由于紅花有些種植在坡地,采收機行走時四輪與地面有簡單的仿形作用,所以機械式紅花絲采收機正式工作時需要與機架地盤保持平行。水平與縱向移動式,完全由液壓缸驅動,液壓缸伸長量需要嚴格的函數關系才能保持固定架與底盤的相對平行。兩套液壓缸完全相同,分析一套液壓缸結構簡圖。如圖5所示,LAE、LCD、LAB、LAM及角β2為固定,其他長度與度數為變化值。
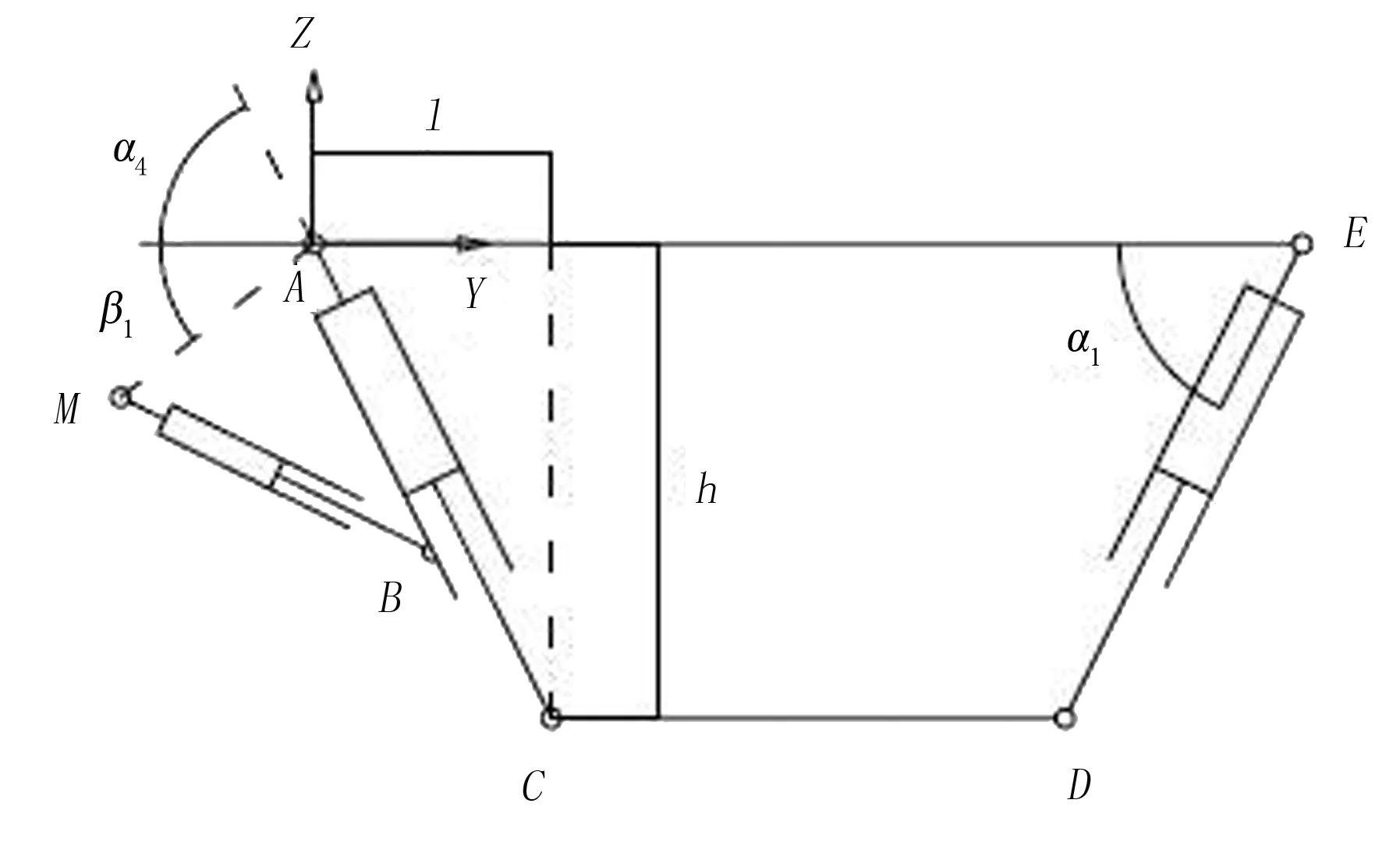
圖5 液壓缸位置簡圖
由圖5知
(8)
(9)
(10)
(11)
在橫向運動時,高度h保持不變。
分別對式(8)、式(9)、式(11)求導得
(12)
(13)
(14)
當l勻速變化時,LAC、LBM、LED的變化率與自身的長度有關,且LAC、LBM與LED的變化率方向相反。由式(12)與式(13)得
(15)
由式(15)知:若想固定架與底盤保持相對平行,LAC與LED的變化率要有嚴格的比例關系。
4 仿形機構中主要尺寸及參數確定
為了使機構達到設計要求的運動范圍即固定架的運動范圍,確定各個液壓缸的長度、機架及固定架寬度及輔助液壓缸在機架上的固定點與液壓缸在機架上β2與的LAB大小。
由紅花采摘時紅花植株的高度與寬度確定固定架縱向移動距離500mm,橫向移動距離400mm。方便固定架的組裝與固定架與機架中間放置其他輔助裝置h至少要500mm。由紅花種植方式得,固定架寬度LCD為1 000mm。
由F1與α1、α4的關系知,當α1最大α4最小時,F1最大,若α1=90°時,F1時無窮大。需要根據則經驗確定α1max=75°,由F4與α1、α4的關系知,當α1最小α4最大時,F1最大,若α4=90°時,F4時無窮大。需要根據則經驗確定α4max=85°,取LAE=1 670mm。則LAC和LED的變化范圍602~1 009mm。取LAC和LED變化范圍600~1 050mm。
由LBM與LAB、LAM、β2的方程式知,LBM隨LAB、LAM的長度增加而增加,隨β2增加而減小。LAB與β2的大小受到機架地盤的限制,取LAM=99mm、β2=45°。有液壓缸形狀及工作特性限制,LBM盡可能增大,則LAB盡可能取最大值。由LAC的變化范圍,選取LAB=475mm,則LBM的變化范圍422~466mm,取LBM的變化范圍400~500mm。
5 基于ADAMS的運動模擬分析
為了驗證該機構的仿形效果,應用ADAMS軟件對該機構進行運動模擬[6]。對液壓缸與輔助液壓缸施加一個移動驅動,固定架施加一個15 000N重力,底盤與地面固定。對機構進行簡化,建立其在ADAMS仿真環境下的模型,運行仿真得到左連接架的運動軌跡。圖6為固定架相對于地面的縱向運動軌跡圖,其位移量即為縱向的總仿形量;圖7為固定架相對于地面的橫向運動軌跡圖,其位移量即為橫向的總仿形量。

圖6 縱向運動軌跡圖
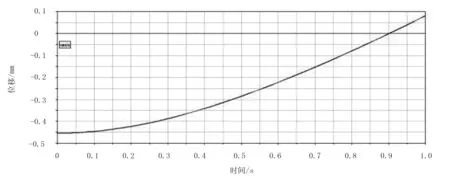
圖7 橫向運動軌跡圖
圖6為固定架縱向移動圖,反映固定架離地面的高度隨時間的變化,其變化范圍在0~580mm之間,而紅花花絲生長位置變化范圍在500mm之內,能滿足收割要求。圖7為固定架橫向移動圖,反映固定架離地面的水平位置隨時間的變化,其變化范圍在0~410mm之間,而紅花種植分布需要固定架變化范圍在400mm之內,能滿足紅花收割要求。
6 結論
1)對仿形機構進行受力分析,液壓所受到力的大小主要受到 液壓缸在運動過程中與Y軸的夾角α、固定架負重G的影響。
2)對各部件進行參數設計,確定LAM=99mm、β2=45°,輔助液壓缸長度LBM的變化范圍400~500mm,取LAC和LED變化范圍600~1 050mm。
3)用優化后的數據,運用仿真分析軟件ADAMS軟件對仿形機構進行運動分析,縱向總仿形量達到580mm,橫向總仿形量達到縱向總仿形量達到410mm,表明該仿形機構能滿足紅花收割高度要求。
[1] 葛云,張立新,韓丹丹,等.紅花絲機械采收的現狀及發展趨勢[J].農機化研究,2014,36(11):265-268.
[2] 田東洋,劉姣娣,李衛敏.薰衣草收割機切割高度可調節機構的設計及運動仿真[J].農機化研究,2017,39(5):159-162,166.
[3] 趙淑紅,蔣恩臣,閆以勛,等.小麥播種機開溝器雙向平行四桿仿形機構的設計及運動仿真[J].農業工程學報,2013(14):26-32.
[4] 何磊,劉向新,周亞立,等.垂直升降式單體仿形棉花打頂機[J].農業機械學報,2013(S2):62-67.
[5] 劉平義,李海濤,張紹英,等.全地形仿形行走車仿形行走理論及試驗(英文)[J].農業工程學報,2012(S2):134-139.
[6] 趙建亮,尚書旗,趙忠海,等.花生播種機仿形機構的運動仿真分析—基于UG[J].農機化研究,2012,34(10):33-36.
[7] 馬永財,張偉,李玉清,等.播種機單體兩種仿形機構的研究[J].農機化研究,2011,33(8):101-103,106.
[6] 白曉虎,張祖立.基于ADAMS的播種機仿形機構運動仿真[J].農機化研究,2009,31(3):40-42.
