基于Adams的棉田殘茬廢膜收集打捆機分析
2018-03-28 00:49:07張愛民廖培旺劉玉京
農機化研究 2018年3期
關鍵詞:分析
張愛民,廖培旺,李 偉,劉玉京
(濱州市農業機械化科學研究所,山東 濱州 256600)
0 引言
黃河三角洲棉區是中國重要的棉花種植區之一,地膜覆蓋種植技術因能夠大幅提高農作物的單產而被廣泛應用[1]。2015年,山東棉區種植面積已達51.6萬hm2,占全國植棉面積的13.6%[2],2003-2012年,10年內棉田累計投入地膜25萬t以上 ,20年以上棉田的土壤地膜殘留量為18.84~53.53 kg/hm2。而黃河三角洲地區是山東省的棉花主產區,其種植面積超出全省的1/3[3]。殘膜積累在土壤中,不僅會嚴重影響棉花產量,還會影響農機具的田間作業質量[4-5]。因此,必須采取措施將殘留在地里的殘膜回收。目前,回收殘膜的方法主要有人工和機械兩種。由于人工回收存在勞動強度大、效率低等問題,因此目前我國普遍使用機械回收的方式回收殘膜。
目前,中國已經研制了多種殘膜回收機具,根據回收時間的不同可分為3類:苗期殘膜回收機械、秋后殘膜回收機械和播前殘膜回收機械[6]。由于棉花采摘后,當年的地膜不僅在地表殘留比較完整而且強度也比較高,因此秋后是殘膜回收的最佳時機[7-10]。用于秋后殘膜回收的機械有很多種。由新疆農業科學院農業機械化農業機械化研究所研制的1SM-1.8(2.0)型牽引式棉田殘膜回收機將回收的殘膜收集到殘膜收集箱內,后期處理和運輸不方便[11]。由新疆農業大學機械交通學院研制的釘刺式殘膜回收機不能夠把埋在地里的根茬一起回收[12]。
針對上述問題,本文提出了一種能將殘膜和根茬一起回收并打捆的棉田殘茬廢膜收集打捆機。該機主要用于秋后殘膜的回收,并能將廢膜(當年的新膜和往年的大部分舊膜)和埋在地下的根茬一起回收并打捆。
1 結構和工作原理
1.1 結構
由濱州市農業機械化科學研究所研發的棉田殘茬廢膜收集打捆機主要由限深地輪、懸掛機架、變速箱及傳動機構、殘茬廢膜清理齒輥、挑膜齒、刷膜輪、松土鏟、導流板、圓捆機及護罩等組成,如圖1所示。
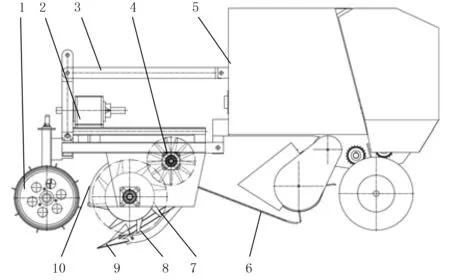
1.限深地輪 2.變速箱及傳動機構 3.懸掛機架 4.刷膜輪 5.圓捆機 6.導流板 7.殘茬廢膜清理齒輥 8.挑膜齒 9.松土鏟 10.護罩 圖1 棉田殘茬廢膜收集打捆機結構示意圖Fig.1 Schematic diagram of structure of cotton stubble collecting waste film bundling machine
1.2 工作原理
棉花殘茬廢膜收集打捆機采用三點懸掛方式與拖拉機連接。工作時,動力經拖拉機輸出軸傳遞給變速箱,經變速箱變速后分別由側輸出軸傳遞給殘茬廢膜清理齒輥和刷膜輥,由后輸出軸傳遞給圓捆機;限深地輪上的帶刃齒板在滾動過程中將地膜埋邊切斷,松土鏟入土10cm,通過正對行膜邊覆土位置,將邊膜與外側覆土有效分離,同時殘留在土壤里的殘茬與土壤分離;殘茬廢膜清理齒輥在轉動的過程中將廢膜和殘茬同時挑起,被殘茬廢膜清理齒輥帶動沿順時針方向移動,移動過程中土壤分離下落;殘茬和殘膜移動至刷膜輪位置被刷膜輪刷到導流板上,最后殘茬和殘膜沿導流板進入圓捆打捆機進行打捆。
2 理論分析
2.1 殘茬廢膜清理齒輥和刷膜輪的轉速比分析
在機具工作過程中,殘茬廢膜清理齒輥上的挑膜齒板入土20mm,在機具以一定速度前進的同時,殘茬廢膜清理齒輥和刷膜輪的轉向如圖2所示。由圖2可知:要想讓挑起的殘茬和廢膜每次都能從殘茬廢膜清理齒輥上的挑膜齒板上刷下,殘茬廢膜清理齒輥上的挑膜齒板和刷膜輪上的齒必須在A處“嚙合”。因此,為了使兩者能夠始終在A處“嚙合”,必須保證殘茬廢膜清理齒輥和刷膜輪具有一定的轉速比。

1.殘茬廢膜清理齒輥 2.刷膜輪 圖2 挑膜和刷膜示意圖Fig.2 Schematic diagram of picking the film
由圓周旋轉的線速度公式V=πrn/30(r為旋轉圓周的半徑,n為旋轉圓周的轉速),可分別得到殘茬廢膜清理齒輥上的挑膜齒板和刷膜輪上的齒的線速度,再由弧長公式L=2πr/z(z為齒數),可分別得到殘茬廢膜清理齒輥上相鄰兩個挑膜齒板和刷膜輪上相鄰兩個齒的長度,最后由公式T=L/V,可分別得到殘茬廢膜清理齒輥上相鄰兩個挑膜齒板和刷膜輪上相鄰兩個齒到達A處的時間。
因始終在A處“嚙合”,所以殘茬廢膜清理齒輥上的相鄰兩個挑膜齒板和刷膜輪上相鄰兩個齒到達A處的時間T相等。最終,推出殘茬廢膜清理齒輥和刷膜輪的轉速關系為
(1)
式中n1—殘茬廢膜清理齒輥的轉速(r/min);
z1—殘茬廢膜清理齒輥的齒數;
n2—刷膜輪的轉速(r/min);
z2—刷膜輪的齒數。
2.2 殘茬廢膜清理齒輥齒尖的運動軌跡分析
殘茬廢膜清理齒輥的結構圖如圖3所示。

圖3 殘茬廢膜清理齒輥的結構圖Fig.3 Structure diagram of waste-film-cleaning-tooth-roller
因該殘膜回收機是由拖拉機牽引前進,因此殘茬廢膜清理齒輥自身在做勻速圓周運動的同時,還隨拖拉機向前行走。因此,殘茬廢膜清理齒輥齒頂點C處的運動方程為
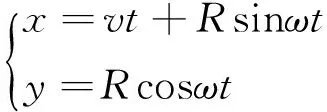
(2)
式中v—拖拉機前進速度;
t—機具運動時間;
ω—殘茬廢膜清理齒輥的角速度;
R—殘茬廢膜清理齒輥齒頂點C到輥子中心的距離。
殘茬廢膜清理齒輥齒頂點C處的運動軌跡L1如圖4所示。
3 基于Adams的運動學和動力學分析
分析可得,在殘膜回收機具中挑膜部件和脫膜部件是最關鍵的部件[13]。因此,本章節主要利用Adams虛擬樣機技術對殘茬廢膜清理齒輥和刷膜輪進行運動學分析。又因為在殘膜回收機具中挑膜部件是主要的受力部件,因此利用Adams虛擬樣機技術對殘茬廢膜清理齒輥進行動力學分析。

圖4 殘茬廢膜清理齒輥齒的運動軌跡Fig.4 Trajectory of tooth of waste-film-cleaning-tooth-roller
對挑膜和刷膜部件利用SolidWorks建模[14],然后導入Adams中,定義約束和驅動,得到如圖5所示的Adams分析模型。
3.1 運動學分析
3.1.1 殘茬廢膜清理齒輥和刷膜輪齒數分析
選取殘茬廢膜清理齒輥的一個齒和在刷膜輪上與這個“嚙合”的一個齒,并分別在這兩個齒的外部建立
標記點POINT_M點和POINT_N點作為研究對象。由理論分析可知,殘茬廢膜清理齒輥和刷膜輪的轉速應與相應的齒數成反比。

圖5 Adams分析模型Fig.5 Adams analysis model
設刷膜輪的齒數為13個,殘茬廢膜清理齒輥的齒數為8個,因此選取殘茬廢膜清理齒輥和刷膜輪的角速度分別為1 300°/s和800°/s。分別得出POINT_M點和POINT_N點隨時間變化的位置圖,如圖6所示。
設刷膜輪的齒數為8個,殘茬廢膜清理齒輥的齒數為13個,因此選取殘茬廢膜清理齒輥和刷膜輪的角速度分別為800°/s和1 300°/s。分別得出POINT_M點和POINT_N點隨時間變化的位置圖,如圖7所示。
分析圖6和仿真過程可知:當殘茬廢膜清理齒輥的轉速比刷膜輪的轉速大時,刷膜輪齒到達起始位置要滯后殘茬廢膜清理齒輥齒到達起始位置,這樣容易導致還沒到達“嚙合”點A處(見圖2)時,殘茬廢膜清理齒輥齒上的殘膜就在B處被掛在刷膜輪齒的上端(見圖8),最終導致脫膜困難。

圖8 挑膜和刷膜示意圖Fig.8 Schematic diagram of picking the film and brushing film
分析圖7和仿真過程可知:當殘茬廢膜清理齒輥的轉速比刷膜輪的轉速小時,刷膜輪齒到達起始位置要超前殘茬廢膜清理齒輥齒到達起始位置,這樣能夠使殘茬廢膜清理齒輥齒上的殘膜在“嚙合”點A(見圖2)處被刷膜輪刷下。
綜上所述,因為殘茬廢膜清理齒輥和刷膜輪的轉速應與相應的齒數成反比,又因為殘茬廢膜清理齒輥的轉速必須比刷膜輪的轉速小時殘膜才能被順利的刷下來,因此殘茬廢膜清理齒輥的齒數應該大于刷膜輪的齒數,即z1>z2。
3.1.2 殘茬廢膜清理齒輥的運動軌跡驗證
通過Adams分析模型,驗證理論分析的殘茬廢膜清理齒輥齒的運動軌跡是否正確。同樣,在Adams分析模型中標記如圖4所示的C點,通過仿真分析,得到C點的運動軌跡如圖9所示。

圖9 殘茬廢膜清理齒輥齒的運動軌跡Fig.9 Trajectoryof tooth of waste film cleaning tooth roller
通過觀察圖4和圖9可知:理論分析的殘茬廢膜清理齒輥齒的軌跡與Adams分析模型的仿真結果是一致的,因此可得出殘茬廢膜清理齒輥齒的運動軌跡是正確的。
3.2 動力學分析
棉田殘茬廢膜收集打捆機的動力選擇約翰迪爾的N850拖拉機,該拖拉機的行進速度為3~27.9km/h。通過Adams分別分析拖拉機行進速度和殘茬廢膜清理齒輥的轉速對殘茬廢膜清理齒輥齒與地面的碰撞力的影響。
3.2.1 拖拉機行進速度對碰撞力的影響
保持殘茬廢膜清理齒輥的轉速不變,利用函數step建立拖拉機行進速度函數為[15]
833+step(time,0.1,0,0.101,1000)+step(time,0.2,0,0.201,1000)+step(time,0.3,0,0.301,1000)+step(time,0.4,0,0.401,1000)+step(time,0.5,0,0.501,1000)+step(time,0.6,0,0.601,1000)+step(time,0.7,0,0.701,917)
選擇仿真時間為0.72s,仿真結果如圖10所示。在圖10中,實線代表拖拉機的行進速度,虛線代表殘茬廢膜清理齒輥齒所受的碰撞力。
分析圖10和仿真過程可知:在殘茬廢膜清理齒輥齒入土時受到的碰撞力大,入土之后拖拉機的行進速度對碰撞力的影響很小,因此在考慮碰撞力時可忽略拖拉機行進速度對其的影響。
3.2.2 廢膜清理齒輥的轉速對碰撞力的影響
保持拖拉機行進速度不變,利用函數step建立殘茬廢膜清理齒輥的轉速函數為
800+step(time,0.1,0,0.101,1000)+step(time,0.2,0,0.201,1000)+step(time,0.3,0,0.301,1000)+step(time,0.4,0,0.401,1000)+step(time,0.5,0,0.501,1000)+step(time,0.6,0,0.601,1000)+step(time,0.7,0,0.701,1000)
選擇仿真時間為0.72s,仿真結果如圖11所示。圖11中,實線代表殘茬廢膜清理齒輥的轉速,虛線代表殘茬廢膜清理齒輥齒所受的碰撞力。

圖10 行進速度對碰撞力的影響Fig.10 Affect advance speed speed of collision force

圖11 轉速對碰撞力的影響Fig.11 Affect the speed of collision force
分析圖11和仿真過程可知:殘茬廢膜清理齒輥的轉速對碰撞力的影響要比拖拉機行進速度的影響大很多,且這個影響是折線式的影響。
綜上所述,在研究殘茬廢膜清理齒輥齒的碰撞力時,主要考慮因素因為殘茬廢膜清理齒輥的轉速,可忽略拖拉機行進速度的影響。
4 結論
1)該棉田殘茬廢膜收集打捆機一次性完成殘茬、廢膜清理、輸送和打捆,打捆后便于收集和運輸,能夠有效防止堆放于田間地頭的殘膜被大風吹散造成二次污染。
2)該機具殘茬廢膜清理齒輥和刷膜輪的轉速與齒數成反比關系。
3)該機具殘茬廢膜清理齒輥的齒數必須大于刷膜輪的齒數。
4)分析得到了該機具的殘茬廢膜清理齒輥齒的運動軌跡。
5)影響殘茬廢膜清理齒輥齒與地面的碰撞力主要因素是殘茬廢膜清理齒輥的轉速,拖拉機行進速度對其影響很小。
[1] 張東興.殘膜回收機的設計[J].中國農業大學學報,1999,4(6) :41-43.
[2] 毛樹春,李付廣.當代全球棉花產業[M].北京:中國農業出版社,2016:545-549.
[3] 李麗霞,王智華.黃河三角洲地區棉田地膜殘留特征研究[J].山東農業科學,2016,48(6 ):84-87.
[4] 侯書林,胡三媛,孔建銘,等.國內殘膜回收機研究的現狀[J].農業工程學報,2002,18(3):186-190.
[5] 沙吾列,居馬漢.有關殘膜回收技術的分析探討[J].農村牧區機械化,2012(3):23.
[6] 李明洋,馬少輝.我國殘膜回收機研究現狀及建議[J].農機化研究,2014,36(6):242-244.
[7] 曹肆林,王序儉,沈從舉,等.殘膜回收機械化技術的專利技術研究[J].中國農機化,2009(4):48-50.
[8] 于云海,陳學庚,溫浩軍.秸稈粉碎與殘膜集條聯合作業機的研制與試驗[J].農業工程學報,2016,38(24 ):1-6.
[9] 張學軍,吳成武,王旭東,等. 殘膜分離篩機構的運動仿真與分析[J]. 農業工程學報,2007,23(7):113-116.
[10] 李斌,王吉奎,胡凱,等. 殘膜回收機順向脫膜機理分析與試驗[J]. 農業工程學報,2012,28(21):23-28.
[11] 劉旋峰,張麗,郭兆峰,等. 1SM-1.8(2.0)型牽引式棉田殘膜回收機[J]. 新疆農機化,2015(3):13-16.
[12] 靳偉,張學軍,李超新.釘刺式殘膜回收機的設計及試驗研究[J]. 中國農機化學報,2014,35(4):55-57.
[13] 周新星,胡志超,嚴偉,等.國內殘膜回收機脫膜裝置的研究現狀[J].農機化研究,2016,38(11):263-267.
[14] 王敏,王宏,等.SolidWorks2012機械設計完全自學手冊[M].北京:機械工業出版社,2013:56-87.
[15] 郭衛東,李守忠,馬璐.ADAMS 2013應用實例精解教程[M].北京:機械工業出版社,2015:88-94.
猜你喜歡
現代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
當代經濟研究(2016年5期)2016-12-01 03:12:05
現代農業(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學學報(社會科學版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06
