履帶式小型甘薯秧蔓處理機的設計
2018-03-28 00:49:25蔡玉虎呂釗欽
農機化研究 2018年3期
關鍵詞:作業
蔡玉虎,呂釗欽
(山東農業大學 機械與電子工程學院,山東 泰安 271018)
0 引言
甘薯是重要的糧食、飼料、工業原料及新型的能源用料,是世界糧食生產的底線作物和極具競爭力的優勢能源作物,也是優質的抗癌保健食品,是欠發達地區的主要經濟收入之一,生產意義重大[2-4]。
我國是世界甘薯生產大國,目前我國甘薯的種植面積和總產量均居世界首位。根據FAO統計資料,2013年我國甘薯收獲面積356萬hm2,甘薯總產量7 763萬t,分別約占世界總產量43%和75%[1]。我國雖然是甘薯生產大國,但其機械化生產技術卻十分落后,作業機具的專用化、高效化、系列化程度還較低,區域發展不平衡,嚴重制約了產業的發展。
甘薯是勞動密集型土下作物,其生產環節主要包括:育苗、起壟、剪苗、移栽、灌溉、中耕、施藥及收獲等環節。收獲包括:割蔓、挖掘、撿拾、清選及收集等。在國內,割蔓環節主要采用人工割蔓,勞動強度大、成本高、效率低,嚴重影響了農民種植積極性,因此研發適用的甘薯秧蔓處理機具有非常重要的意義。履帶式底盤機械設備具有接地面積大、接地比壓小、附著性能好、爬坡能力強、轉彎半徑小及跨溝越埂能力強等優點,多數用于復雜地形機械設備。履帶式行走裝置廣泛用于工程機械和農業機械等野外作業設備[5]。
由于田間土壤比較松軟,為減少機械設備的接地比壓,減少機械設備對土壤壓實產生的不良影響和提高機械設備的通過性,采用橡膠履帶式底盤作為行走機構。
對丘陵地區地塊較小的土地,大型的機械無法工作,故研究小型的甘薯機械也是當前農業機械發展的趨勢。小型機械機動靈活,便于安裝拆卸,價格相對便宜,可減少生產成本。經過相關理論研究,本文設計研制出一種履帶式小型甘薯秧蔓處理機。
1 總體結構與工作原理
1.1 作業要求
履帶式小型甘薯秧蔓處理機作業對象為地塊較小的土地,在收貨甘薯之前,進行收割秧蔓,收割作業模式為單壟作業。在山東農業大學實驗基地進行田間實地測量的甘薯壟形為:兩壟溝間中心距為1 000mm,壟頂寬度250mm,壟底寬度500mm,壟高200mm。甘薯壟的模式,如圖1所示。

圖1 甘薯壟示意圖Fig.1 Schematic diagram of sweet potato ridge pattern
1.2 總體結構
履帶式小型甘薯秧蔓處理機主要由動力及傳動系統、工作臺支架、履帶式底盤、切割機構、立式滾筒撥禾機構、輸送機構及集秧裝置等主要部分組成,如圖2所示。

1.挑秧桿 2.藤蔓粉碎刀 3.變速箱 4.絞龍 5.工作臺支架 6.簡易駕駛室 7.操縱臺 8.發動機罩 9.柴油機 10.輸送帶帶輪 11.集秧箱 12.履帶行走機構 13.輸送帶箱體 14.帶輪 15.立式滾筒撥禾機構 16.根部圓盤切刀 圖2 整體結構圖和局部剖視圖Fig.2 The overall structure drawing and partial section view
縱向藤蔓粉碎刀安裝在整機的前方,主要由刀軸和粉碎刀片組成,采用甩刀式,刀片采用直刀片。其作用主要為切斷挑秧桿挑起的秧蔓,使秧蔓變短并且與相鄰兩壟生長的秧蔓分離,實現模塊化切割,可使立式滾筒撥禾機構(喂入機構)和輸送機構能夠更加高效、快捷地將甘薯秧蔓收集到集秧箱。
一對立式滾筒撥禾機構(喂入機構)豎直安裝在工作臺支架上,該機構由立式滾筒、盤形凸輪機構及行星齒輪機構組成,其轉速相同、方向向內且相反。運用行星齒輪機構,體積小、質量輕、承載能力強、傳動平穩,能夠符合在尺寸空間較小的情況下實現結構緊湊和平穩傳動。盤形溝槽凸輪安裝在行星齒輪機構的下方,分3層安裝,凸輪機構的從動桿件作為撥禾齒,可解決秧蔓纏繞撥禾齒的問題。
輸送機構主要由橡膠傳送帶、傳送帶軸、液壓油缸及傳送帶箱體組成。橡膠傳送帶表面有間距均勻分布的擋板,防止傳送的秧蔓滑落。被粉碎過的秧蔓經絞龍輸送到傳動帶上,秧蔓在傳送帶的末端滑落至集秧箱。
橡膠履帶式行走機構采用由“四輪一帶(驅動輪、負重輪、支撐輪、導向輪和橡膠履帶)”組成,根據作業要求合理地設計出其基本參數,適合甘薯種植田的運行。
1.3 工作原理
作業時,在液壓油缸的作用下將前部的收割工作臺放下,位于工作臺支架下部的根部圓盤切刀將甘薯秧蔓根部切斷,縱向藤蔓粉碎刀將秧蔓粉碎成合適的長度,并將收割壟范圍內的秧蔓與左右相鄰壟內的秧蔓切割分離,從而實現模塊化切割。在機器前進速度作用下,被粉碎的秧蔓喂入立式滾筒撥禾機構,通過撥禾機構將秧蔓傳給絞龍,并由輸送機構運輸到集秧箱。主要技術參數指標如下:
外形尺寸(長×寬×高)/mm: 3 575×1 570×1 660
作業幅度/mm:1 000
作業行數:單壟單行
工作速度/km·h-1:3
配套動力/kW:2.205(17.5馬力水冷式柴油機)
生產率/hm2·h-1:0.3~0.4
除凈率/%:﹥90
留茬高度/mm:﹤75
傷薯率/%:﹤0.8
2 關鍵部件的設計
2.1 藤蔓粉碎刀
藤蔓粉碎刀采用甩刀式,甩刀片是該裝置的核心部件,且容易磨損。刀片的形狀和尺寸不僅對刀軸的設計和甩刀片的排列有較大的影響,而且對粉碎秧蔓的效果有較大的影響[6-7]。
刀片按照形狀分裂主要有直刀、T型刀、Y型刀、錘爪、L型刀及其改進型刀。根據本機設計要求,采用直刀片,雙面開刃。為使刀片具有較高的耐磨性和抗沖擊韌性,甩刀材料選用6mm厚65Mn鋼片,其結構圖如圖3所示。

圖3 刀片結構圖Fig.3 Blade structure diagram
甩刀片的數量要合理,數量過多增大啟動扭矩和功率的消耗,數量過少莖秧不能完全切割,起不到粉碎的效果,理論上甩刀的數量為
N=C·L
(1)
式中N—甩刀總片數(片);
C—甩刀的密度(片/mm);
L—甩刀在刀軸上的分布長度(mm)。
對于甩刀的密度C,直刀一般取0.04~0.07;本機的甩刀的作業幅寬為900mm,甩刀片的數量取36片。為減小甩刀的振動,增加機具的平衡性能,甩刀的排列方式選取對稱排列分布,刀片在刀軸軸向上等間距分布,在刀軸圓周方向上等角分布(3排刀具,每排刀具之間的夾角為120°)。藤蔓粉碎刀具的總體結構圖,如圖4所示。
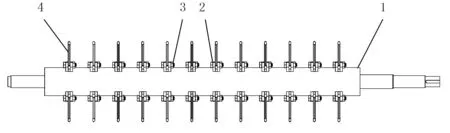
1.刀軸 2.螺栓 3.螺母 4.刀片 圖4 藤蔓粉碎刀結構圖Fig.4 The structure diagram of seedling crushing knife
甩刀的絕對運動是由機器前進運動和刀具的旋轉兩種運動的合成,對刀片尖端任意一點運動分析,如圖5所示。以刀軸的旋轉中心O為原點,經過時間t時刀片尖端任意一點的運動方程為
(2)
對式(2)中時間t進行求導得到的速度方程為
(3)
式中x—刀片尖端水平方向位移(m);
y—刀片尖端豎直方向位移(m);
v1—機具前進的速度(m·s-1);
R—刀片尖端的回轉半徑(m);
ω—刀片的角速度(rad/s)。
根據運動方程和速度方程對藤蔓粉碎刀運用Adams進行運動學仿真得到刀片尖端的軌跡線,其軌跡線,如圖6所示。
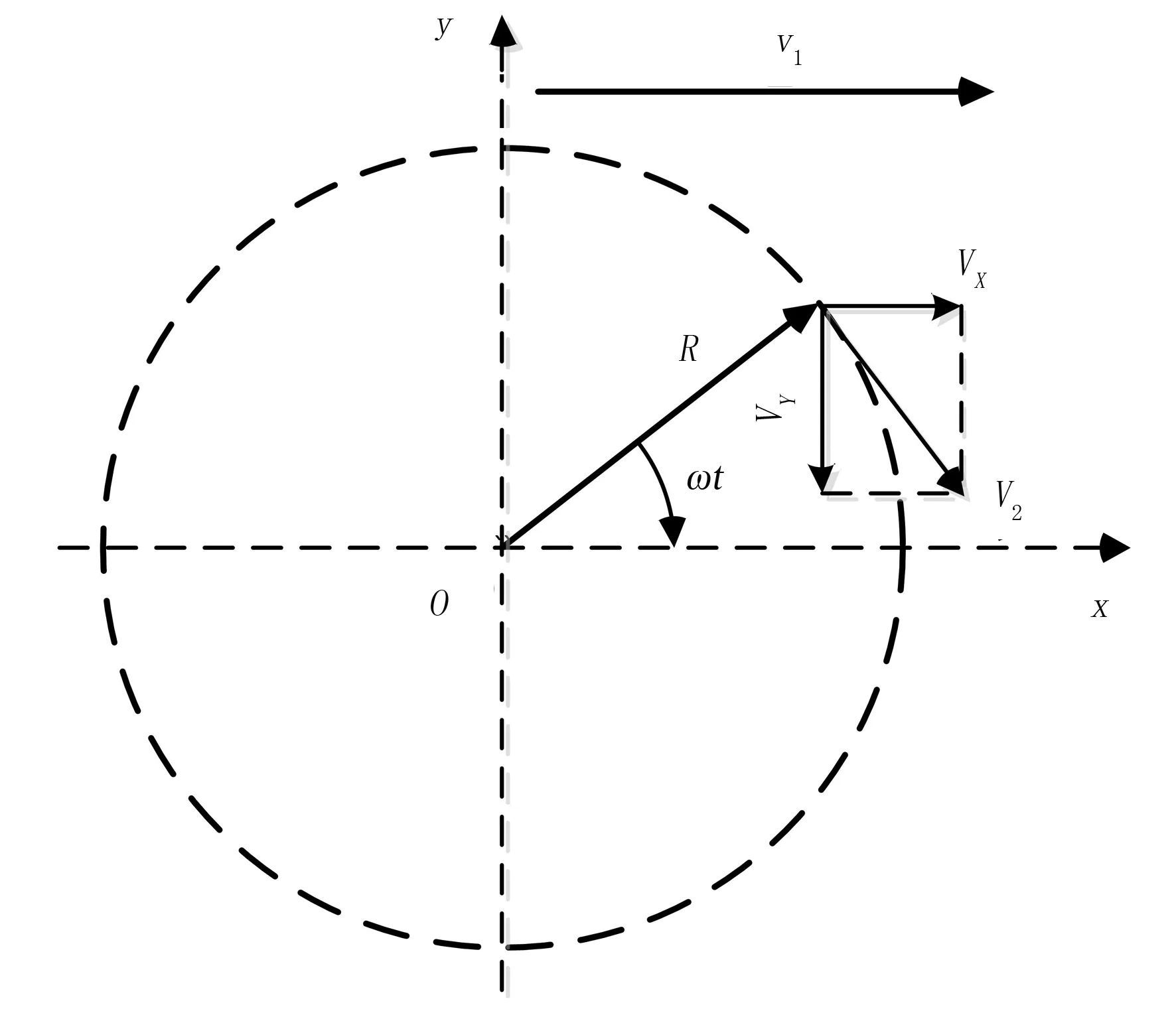
圖5 刀片尖端運動分析圖Fig.5 Motion analysis diagram of the tip of the blade

圖6 刀片尖端軌跡線Fig.6 The trajectory of the tip of blade
在仿真中設置機具前進速度為0.833m/s,粉碎刀的轉速為1 200r/min,刀片尖端的軌跡線為余擺線,刀具的進距(相鄰旋轉周期的中心距)為85mm,小于甘薯株距(200mm),保證了該刀具不會出現漏切的情況。
2.2 立式滾筒撥禾機構
為了避免喂入甘薯秧蔓時堵塞撥禾齒,查閱相關文獻資料,并參考青貯飼料收獲機的撥禾形式,設計了立式滾筒撥禾機構,解決了秧蔓纏繞撥禾齒的問題。其工作原理,如圖7所示。
該機構由立式滾筒、行星齒輪機構(傳動作用即帶動立式滾筒轉動)及平面盤形溝槽凸輪機構(在滾筒內分3層布置)組成。其中,3層凸輪機構中的凸輪固定于立式滾筒之中,立式滾筒的轉動帶動凸輪從動桿件(撥禾齒)沿凸輪溝槽運動同時從動桿件在立式 滾筒里做伸縮運動。
立式滾筒撥禾機構結構圖,如圖8所示。
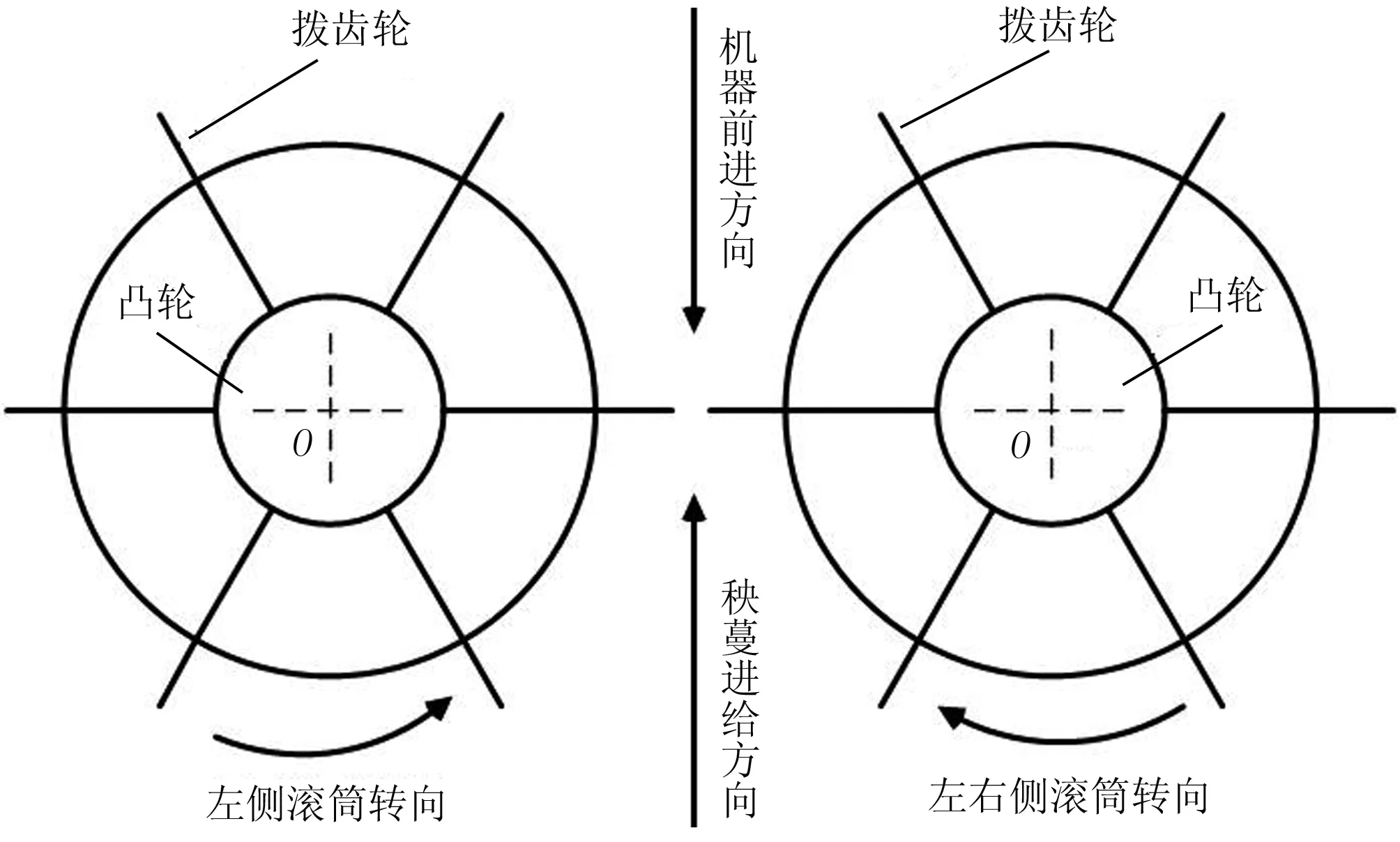
圖7 工作原理圖Fig.7 The working principle diagram

1.齒圈 2.凸輪 3.撥禾齒 4.太陽輪 5.行星輪 6.立式滾筒 7.傳動軸 8.行星齒輪支架 9.滾筒底座 圖8 立式滾筒撥禾機構結構圖Fig.8 Structure diagram of vertical roller pulling mechanism
凸輪機構是該機構的核心部件,根據本機的工作要求,選取從動件的運動規律為5次多項式,適用于高速、輕載。該凸輪機構的設計參數,如表1所示。
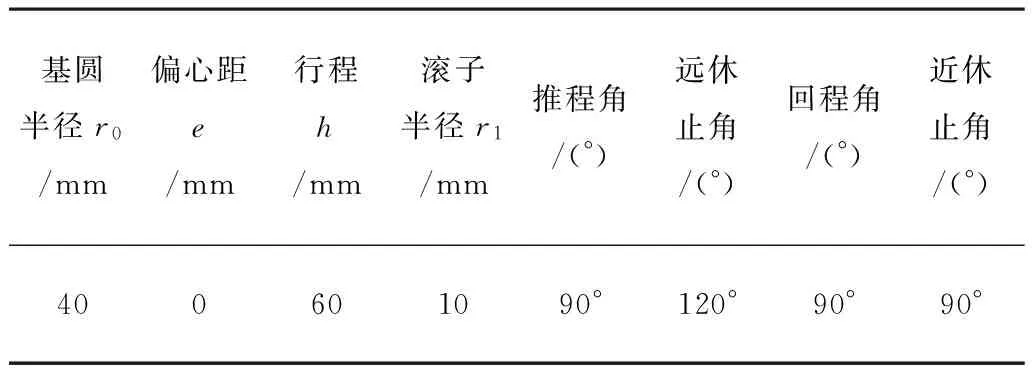
表1 凸輪機構基本參數Table 1 Basic parameters of cam mechanism
運用Adams對該機構進行仿真(設置的轉速為1 200r/min,機器的前進速度為0.833m/s),得到從動桿件(撥禾齒)的質心的位移、速度、加速度曲線,如圖9所示。根據曲線圖,可以得到該機構在啟動瞬間振動較強,運行期間有輕微振動,整體結構滿足需求。
2.3 挑秧桿
挑秧桿將貼在地面上的甘薯藤蔓挑離地面,是實現藤蔓處理效果的基礎。本設計由上板(等腰梯形)、底板、彈簧、固定桿及銷軸組成,底板安裝位置與地面平行,上板和下板呈22°(可調),整體結構如圖10所示。

圖9 立式滾筒撥禾機構仿真曲線圖Fig.9 Simulation curve of vertical roller pulling mechanism

1.上板 2.固定桿 3.底板 4.彈簧 圖10 整體結構圖Fig.10 The overall structure diagram
3 田間試驗
3.1 試驗基本條件
田間性能試驗在山東農業大學南校區甘薯試驗田進行。試驗土壤為壤土,土壤含水率為15%,粘度適中;試驗地平整,壟型規范,覆土嚴實,能夠滿足試驗要求。試驗甘薯品種為寧紫2號,在其收獲期第14天進行,莖稈含水率為81.5%,平均藤蔓莖稈直徑為6.2mm。
3.2 試驗結果
在整機行進速度為3km/h的情況下,進行單壟單行處理作業試驗,主要對留茬高度、除凈率、生產率、傷薯率4個技術指標進行測試。測試結果如表2所示。

表2 整機性能測試結果Table 2 Test results of the whole machine
3.3 結果分析
從履帶式小型甘薯秧蔓處理機試驗性能結果可以看出:平均留茬高度為72.4mm,根據以往經驗留茬高度應不低于70mm為宜,所以該機滿足農藝要求;除凈率為92.3%,滿足技術指標;生產率滿足對甘薯收貨效率的要求;傷薯率為6.9%,能夠保證甘薯的收貨質量,保護了農民的利益。
4 結論
1)理論分析與試驗表明:研制的履帶式小型甘薯秧蔓處理機能順利完成甘薯秧蔓的處理作業,各項作業指標滿足設計要求,滿足秧蔓處理的農藝要求,為甘薯秧蔓處理作業提供了一種新機型。
2)設計了挑秧裝置、粉碎裝置、秧蔓喂入裝置;對粉碎刀片尖端的軌跡進行了分析,能夠保證粉碎刀片不漏切藤蔓,保證良好的效果;首次采用立式滾筒撥禾機構,實現了對秧蔓的無堵塞喂入,解決了秧蔓纏繞的撥禾齒的問題。
3)試驗過程中發現:立式滾筒撥禾機構有輕微的振動,尤其是在啟動時振動強烈。這一問題需要進一步對該機構進行優化設計,以保證機器的壽命。
[1] 馬標,胡良龍,許良元,等.國內甘薯種植及生產機械[J].中國農機化學報,2013,34(1):42-46.
[2] 馬大夫,邱軍.國家甘薯區試考察與產業發展建議[J].雜糧作物,2004,24(5):306-308.
[3] 劉慶昌.甘薯在我國糧食和能源安全中的重要作用[J].科技導報,2004(9):21-22.
[4] 馬大夫.世界甘薯生產現狀和發展預測[J].世界農業,2001(1):17-19.
[5] 徐錫晨.履帶式小型甘蔗收割機底盤和鋼架設計與分析[D].南寧:廣西大學,2006:17-21.
[6] 何玉靜,楊釗星,孫衛平.甘薯秧莖切碎還田機的設計與實驗[J].河南農業大學學報,2009,43(6):639-641.
[7] 涂建平,徐雪紅,夏中義,等.棉桿粉碎還田機刀具優化排列的研究[J].農機化研究,2003(2):102-104.
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
