往復撥桿式食葵盤收獲臺的設計與試驗
2018-03-28 00:49:29韓長杰朱興亮張學軍
農機化研究 2018年3期
關鍵詞:設計
韓長杰,劉 宇,朱興亮,張學軍
(新疆農業大學 機械交通學院,烏魯木齊 830052)
0 引言
食用葵花(以下簡稱食葵)是新疆重要的經濟作物之一[1]。近年來,隨著新疆農業產業結構的調整,區內食葵種植面積穩步增長。2015年,新疆食葵種植面積達14.7萬hm2,產量達46.33萬t,食葵已成為新疆農民增收的重要經濟作物[2]。
食葵采收是食葵生產過程中的關鍵作業環節。食葵分段采收過程是先將籽盤割下,然后插在莖稈上端晾曬約4~7天,取下籽盤喂入葵花收獲機完成食葵收獲。目前,國內食葵盤收獲臺處于基礎研究階段,未應用于實際生產過程,而國外主要對油葵聯合收獲進行研究,未見食葵盤分段采收技術的報道。現有的食葵收獲機中缺少專用的取盤收獲臺,取盤作業完全依靠人工,存在作業環境惡劣、勞動強度大等問題,已成為制約食葵采收的重要因素[3-4]。隨著勞動力成本逐漸增高,食葵取盤作業機械化已成為食葵產業發展的必然趨勢。
本文擬對現有食葵種植模式和采收方法進行分析,模擬人工取盤工序,設計了一種能夠滿足新疆現有種植模式且籽粒損失低的食葵盤收獲臺。因此,對主要工作部件進行理論分析,試制樣機并進行試驗,為食葵收獲機的研制奠定基礎[4]。
1 食葵盤收獲臺結構與工作原理
為確定機構設計原理與型式,對現有人工取盤動作進行分析可知:人工向上提取食葵盤時,食葵盤與莖稈基本垂直,既能減少人工取盤的阻力,又可減少食葵落粒損失。因此,機械取盤時應平托食葵盤并向上抽取完成取盤工作。基于此,本文設計了一種往復撥桿式食葵收獲臺,如圖1所示。收獲臺主要由撥桿、分禾器、引流板、脫盤缺口、鎖止銷、出料口和螺旋輸送器等部件組成。

1.撥桿 2.分禾器 3.引流板 4.脫盤缺口 5.鎖止銷 6.出料口 7.螺旋輸送器 圖1 食葵盤收獲臺結構圖Fig.1 Structure of edible sunflower harvester bench
收獲臺工作時,置于拖拉機前方,食葵盤隨著食葵桿進入兩對稱布置的分禾器之間,并導入至脫盤缺口處。此時,在往復撥桿推動下,將食葵桿撥入其中一側缺口,由鎖止銷鎖定,防止食葵桿退回;隨著拖拉機向前移動,食葵桿從脫盤缺口中逐漸退出,食葵盤被取下;當下一株食葵桿沿著分禾器導入后,由撥桿將其撥入至另一缺口,而第3株食葵桿由撥桿撥入第1株食葵盤所在缺口時,會將第1株食葵盤推離缺口,被引流板導入到螺旋輸送器中,由螺旋輸送器輸送至出料口實現食葵盤的采收。
2 關鍵部件的設計與分析
2.1 往復式撥桿機構的設計與分析
為確保食葵能夠喂入至脫盤缺口的預定位置,并避免前后食葵間擠壓造成籽粒脫落,需將食葵逐個分配至兩側脫盤缺口處,故設計往復式撥桿進行撥送和分流。
往復式撥桿機構主要由導輪、撥桿、液壓馬達、機架、連桿、偏心盤、搖桿、帶座軸承、連接軸、擺桿和2級連桿等部件組成,如圖2所示。其中,偏心盤、連桿和搖桿組成曲柄搖桿機構,擺桿、2級連桿和撥桿組成擺桿滑塊機構,搖桿、連接軸和擺桿固結連接曲柄搖桿機構和擺桿滑塊機構。

1.導輪 2.撥桿 3.液壓馬達 4.機架 5.偏心盤 6.連桿 7.搖桿 8.帶座軸承 9.連接軸 10.擺桿 11.2級連桿 圖2 往復式撥桿驅動機構圖Fig.2 Reciprocating level driving mechanism
工作時,液壓馬達輸出旋轉運動,經偏心盤、連桿和搖桿組成的曲柄搖桿機構轉變成往復擺動,繼而通過連接軸輸出至擺桿、2級連桿和撥桿組成的擺桿滑塊機構,將擺動轉變成撥桿的往復直線運動,實現食葵莖稈的撥動。
為便于對往復式撥桿機構進行分析,建立其運動學分析簡圖,如圖3所示。其中,偏心盤、連桿、搖桿、擺桿、2級連桿和撥桿分別簡化為a、b、c、l、FG。
通過前期對食葵種植模式及割盤后食葵株高的調研,結合收獲臺尺寸參數及多桿機構條件,擬定各機構參數為:a=50mm,b=205mm,c=135mm,d=216mm,h=127mm。對于由桿件a、b、c、d組成的曲柄搖桿機構,γmin出現在主動曲柄與機架共線處(即圖2中OB1或OB2)[5],分析可知
γ=∠B1C1D1=
(1)
帶入數據可得:γ1=70°,γ2=180°-γ1=110°,可知γmin=70°。機構運動過程中,傳動角γ是影響機構傳力性能的重要因素,一般應保證γmin≥40°~50°,即機構不發生自鎖,因此本機構可滿足使用條件。
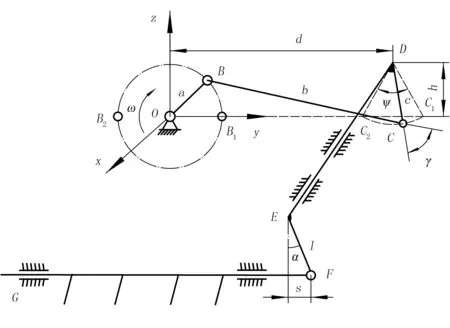
圖3 往復式撥桿驅動機構Fig.3 Reciprocating level driving mechanism
由曲柄搖桿機構特性可知,圖2中△C1DC2應為等腰三角形,設計時確保O、C1、C2在同一水平線上,因此有ψ=π-2∠B1C1D=40°。為確保撥桿滿足工作擺幅要求且不與收獲臺發生碰撞,結合傳動角范圍要求,初定α=38°,則撥桿行程H為
H=Klsinα
(2)
式中l—擺桿長度;
α—擺桿偏角;
K—考慮尺寸誤差和間隙對行程影響的修正系數,K取1.02~1.1。
將數據代入式(2)可求得H=135mm。由于食葵種植行距大于400mm,為避免撥桿工作時與相鄰行的食葵桿產生碰撞,撥桿行程H應小于種植行距的一半,本設計可滿足要求。
2.2 鎖止銷機構的設計與分析
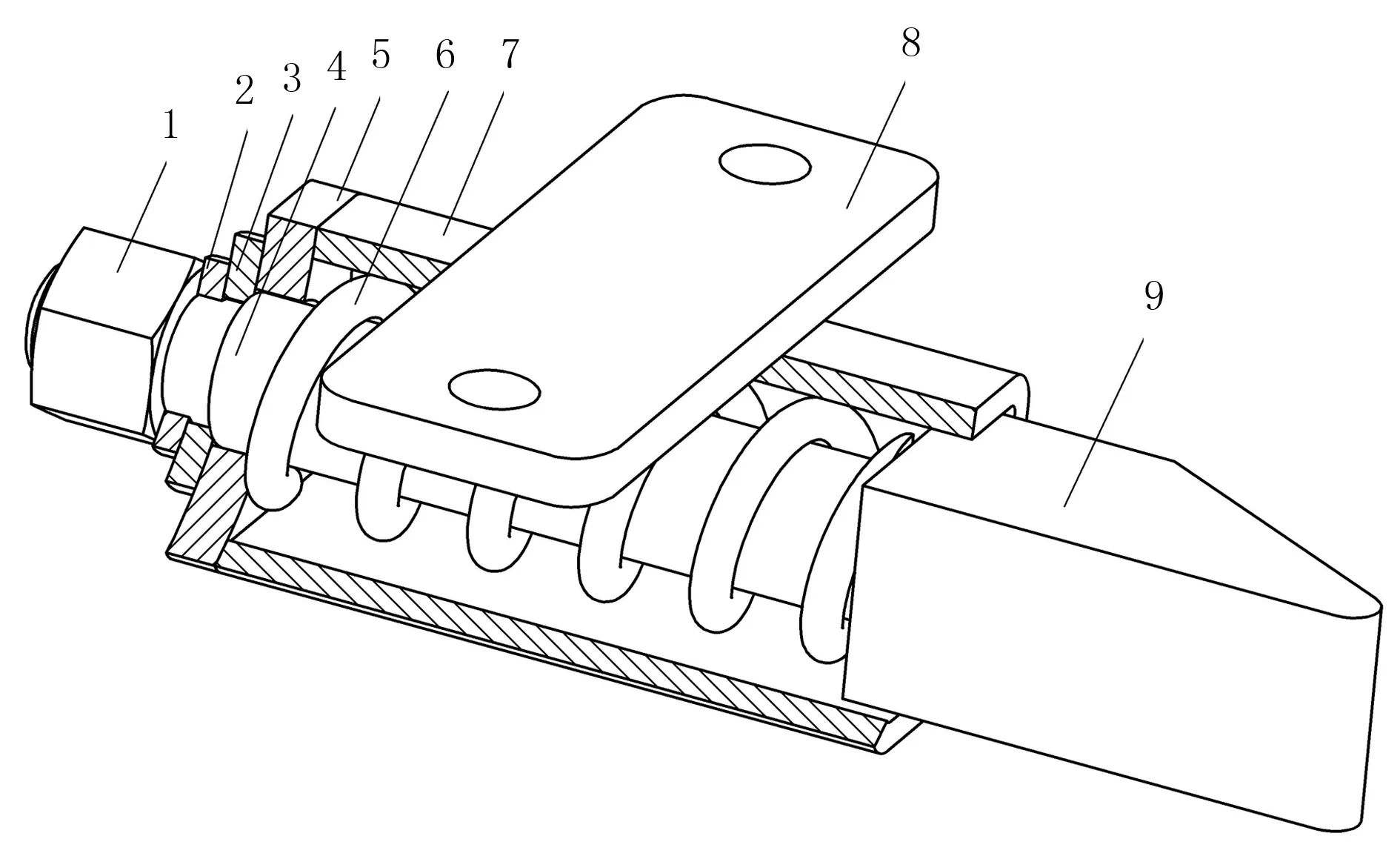
食葵莖稈經撥桿撥入指定位置后,隨機器前行時易脫出,因此設計了鎖止銷用于確保食葵莖稈始終處于預定位置。鎖止銷主要由螺母、彈簧墊片、平墊片、銷軸、擋板、彈簧、套管、安裝版和鎖舌組成,如圖4所示。
鎖止銷工作時隨機器前行,鎖舌觸斜面碰食葵莖稈,鎖舌受力壓縮彈簧直至食葵莖稈完全通過后,彈簧恢復原狀,鎖舌伸出,鎖舌直面鎖定食葵莖稈,避免脫出。
(a) 鎖止銷初始狀態
(b) 鎖止銷工作狀態 1.螺母 2.彈簧墊片 3.平墊片 4.銷軸 5.擋板 6.彈簧 7.套管 8.安裝版 9.鎖舌 圖4 鎖止銷結構及工作過程圖Fig.4 Structure and work process diagram of lock pin
2.3 螺旋輸送器參數確定
螺旋輸送器在農業機械上應用廣泛,本設計中食葵盤螺旋輸送器主要參照谷物螺旋輸送器參數進行計算。螺旋輸送器的主要參數有內徑、外徑、螺距和轉速等[6]。食葵盤螺旋輸送器主要由軸頭、撥料桿、葉片、芯軸和軸承構成,如圖5所示。其中,4個撥料桿螺旋均布于出料口處對應芯軸上。葉片用于將物料輸送至撥料桿,并由撥料桿撥入出料口,完成輸送作業。為減輕整機質量,螺旋輸送器芯軸采用圓管制成。

1.軸頭 2.撥料桿 3.葉片 4.芯軸 5.軸承 圖5 螺旋輸送器結構圖Fig.5 Chart of spiral conveyor
結合收獲臺結構尺寸、機組行進速度、食葵產量及食葵盤尺寸等因素,確定螺旋輸送器芯軸外徑為90mm,壁厚為5mm,總長度1 754mm,葉片厚度為2mm,葉片與底殼間隙為3mm,螺旋葉片高度h為98mm。則螺旋輸送器外徑為
D=d+2h
(3)
式中d—圓管外徑;
h—螺旋葉片高度。
將數據代入(3)可求得D=286mm。
螺距大小決定螺旋葉片對食葵盤的輸送能力。為保證對食葵盤輸送的均勻性,可用經驗公式[6]。即
S=(0.8~1)D
(4)
式中S—螺距。
代入數據可求得S=229~286mm。本文所設計的螺距為260mm,螺旋輸送器轉速為150r/min。
3 樣機的試制與試驗分析
3.1 試驗準備
依照圖1試制物理樣機,裝至拖拉機前端,并利用液壓馬達驅動螺旋輸送器和撥桿機構,空轉后觀察整機運轉情況,調試良好后進行田間試驗。整機工作參數如表1所示。

表1 食葵盤收獲臺的工作參數Table 1 Parameters of edible sunflower harvester bench
3.2 試驗條件
2016年9月5日,在新疆巴音郭楞蒙古自治州博湖縣的鬧音呼都克村進行田間取盤試驗。測得食葵平均株距32cm,行距46cm,插盤高度50~80cm,莖稈直徑20~24mm,機器前進速度為2~3km/h,滿足收獲臺工作參數要求,田間作業如圖6所示。

圖6 田間試驗Fig.6 Field test
3.3 試驗存在的問題及解決措施
試驗結果表明:整機工作較為平穩,能夠實現食葵盤的采收作業;整機原理可行,但收獲過程出現食葵盤輸送不暢、食葵桿前傾等問題,影響了整機工作性能。
對收獲臺工作過程中出現的現象進行總結,分析其產生原因,并從機構尺寸參數和工作參數上提出解決措施,如表2所示。
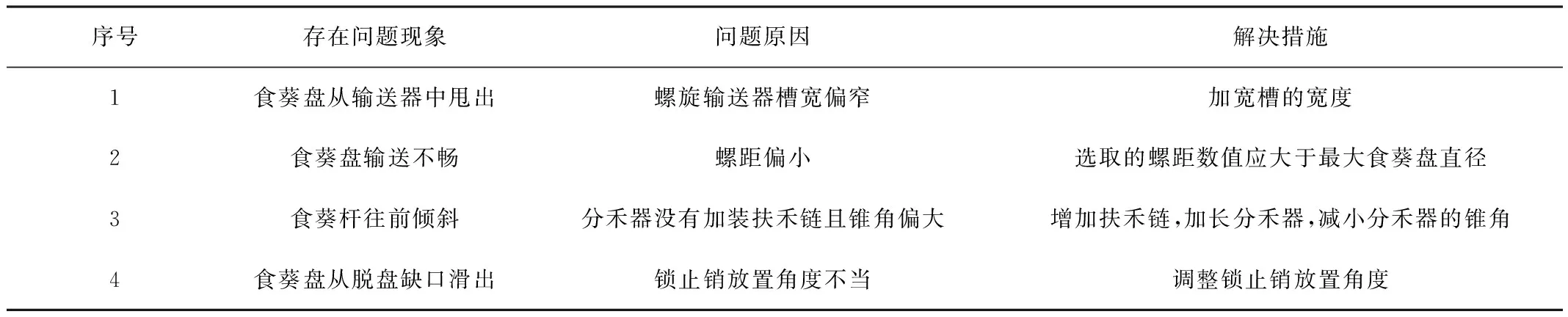
表2 樣機作業過程中出現的問題及解決措施Table 2 Problems and measures in the process of prototype operation
4 結論
1)分析了人工取盤作業特點,確定了食葵盤收獲臺的整體方案,并對食葵收獲臺進行了具體結構尺寸設計。
2)確定撥桿驅動機構為曲柄搖桿機構,結合傳動角及撥桿行程要求,設計并分析了各桿件尺寸參數,驗證了機構設計的合理性;分析并確定了螺旋輸送器的結構和工作參數。
3)試制物理樣機并進行了田間試驗,結果表明:整機工作平穩,可滿足食葵盤采收作業需求。針對樣機工作過程存在的具體問題并提出解決措施,為食葵收獲臺的后續研發提供了理論和試驗基礎。
[1] 馬新云,王道屏,許芳.自走式葵花收獲機:中國,201420490283.8[P].2014-12-17.
[2] 周艷生,張靜,朱豪杰,等.我國葵花收獲機研究現狀及發展前景[J].農業工程,2015(2):11-14.
[3] 達布希拉圖.一種葵花盤收獲機:中國,201520697482.0[P].2015-09-07.
[4] 韓長杰,康秀生,郭輝,等.食葵收獲割臺:.中國,CN205105675U[P].2016-03-30.
[5] 孫桓,陳作模,葛文杰.機械原理(7版)[M].北京:高等教育出版社,2006.
[6] 中國農機研究院.農業機械設計手冊[K].北京:中國農業科學技術出版社, 2007.
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
