乘坐式履帶耕整機試驗分析
2018-03-28 00:49:35王圓明宋樹民湛小梅劉汶樹李亞麗崔晉波
農(nóng)機化研究 2018年3期
王圓明,宋樹民,湛小梅,劉汶樹,李亞麗,崔晉波
(重慶市農(nóng)業(yè)科學(xué)院 農(nóng)業(yè)機械研究所,重慶 401329)
0 引言
目前,國內(nèi)市場上耕作平臺有微耕機[1-3](功率不大于7.5kW)和拖拉機[4-6](功率大于30kW)。微耕機是意大利Benassi公司于20世紀(jì)90年代末研發(fā)制造的以小型柴油機或汽油機為動力的農(nóng)業(yè)機械,1997年被引入國內(nèi),在國內(nèi)得到改進以適應(yīng)國內(nèi)復(fù)雜的地理地貌,特別是山地丘陵地區(qū)。2001年左右,國內(nèi)微耕機市場蓬勃發(fā)展,進入微耕機大發(fā)展時代,涌現(xiàn)了以重慶為主要設(shè)計、生產(chǎn)、銷售一體化產(chǎn)業(yè)鏈基地。拖拉機在國內(nèi)北方地區(qū)形成了很好的產(chǎn)業(yè)鏈,為推進我國平原地區(qū)平整地機械化貢獻(xiàn)了極大的智慧。
隨著國內(nèi)經(jīng)濟發(fā)展,勞動力短缺,微耕機的“解放了牛,累死了人”缺點愈發(fā)突出,并稱為“耕腿機”“咬人機”[7-9]。拖拉機由于其自身質(zhì)量和輪式結(jié)構(gòu),不能滿足南方丘陵山地水田作業(yè)需求。與此同時,2010年之后微耕機行業(yè)開始面臨虧損,大量企業(yè)尋找突破未果從而轉(zhuǎn)型,因此微耕機的升級換代勢在必行。本文將介紹自主研發(fā)的乘坐式耕整機,具有勞動強度低、作業(yè)效率高、田間適應(yīng)性強及一機多用的特點,主要通過試驗對乘坐式履帶耕整機的關(guān)鍵指標(biāo)耕深[10-14]、碎土率[10-14]和耕后平整度[10-14]進行檢驗。
1 整體結(jié)構(gòu)及工作原理
1.1 整體結(jié)構(gòu)
耕整機采用平履帶結(jié)構(gòu)形式、皮帶張緊離合控制輸出、三點懸掛式機具掛接和液壓升降。耕整機主要由機架、行走離合手柄、耕作離合手柄、雙缸發(fā)動機、可調(diào)座椅、耕作升降控制手柄、三點懸掛、旋耕機具、耕作離合傳動、行走離合傳動和履帶底盤組成,其布局如圖1所示,性能參數(shù)如表1所示。其中,為了減輕整機質(zhì)量和增加經(jīng)濟性,旋耕機具采用側(cè)面鏈傳動方式。
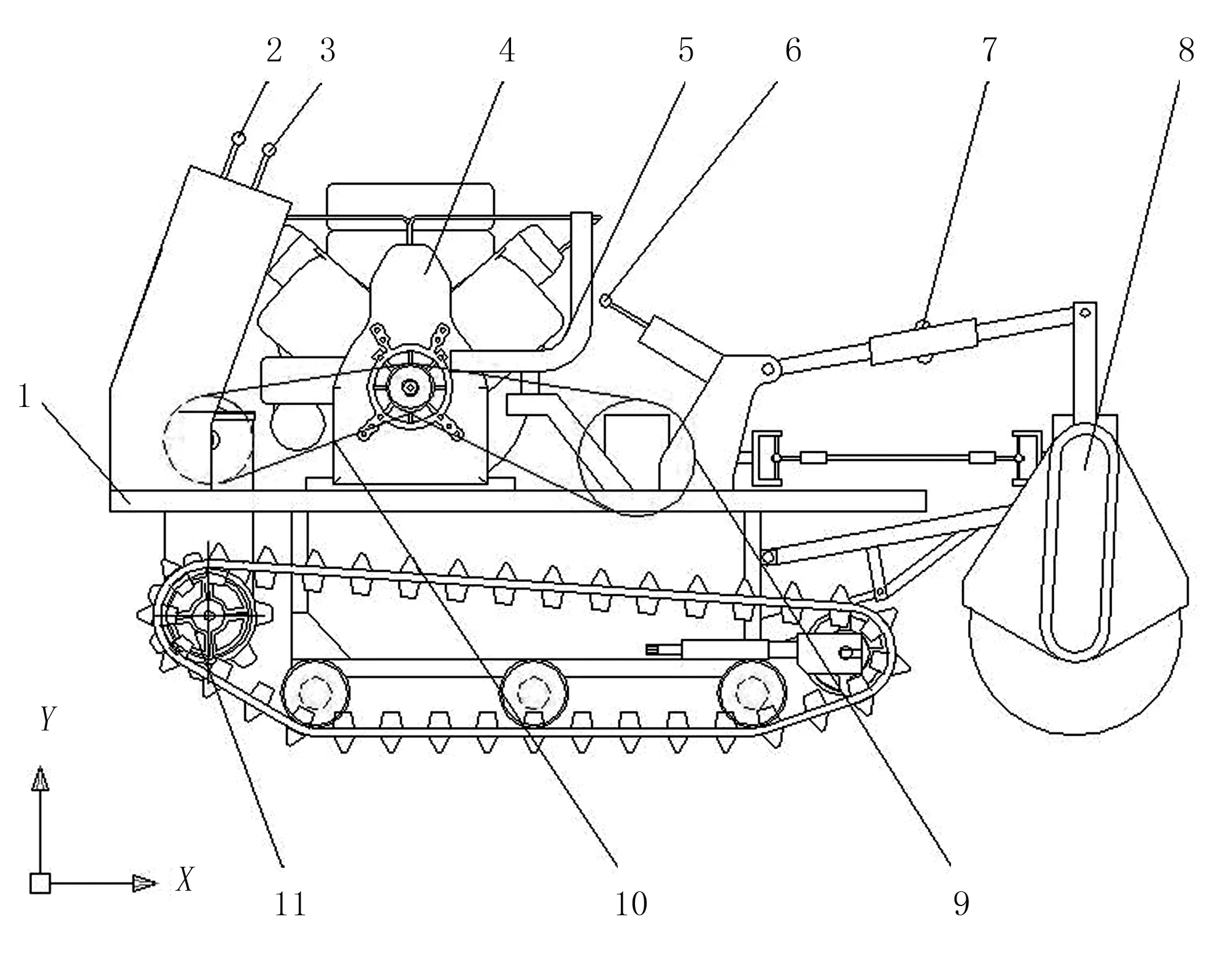
1.機架 2.行走離合手柄 3.耕作離合手柄 4.雙缸發(fā)動機 5.可調(diào)座椅 6.耕作升降控制手柄 7.三點懸掛 8.旋耕機具 9.耕作離合傳動 10.行走離合傳動 11.履帶底盤 圖1 乘坐式履帶耕整機Fig.1 The riding type crawler tillage machine
1.2 工作原理
耕整機設(shè)有行走離合和耕作離合實現(xiàn)行走與耕作分離。耕作機選用3+1檔位變速箱(3個前進擋+1個后退擋),滿足對旱地耕作、水田耕作與行走效率的要求。操作行走離合和變速箱實現(xiàn)耕作機的前進與后退。操作耕作離合使得旋耕離合傳動的皮帶張緊帶動耕作機具旋轉(zhuǎn)實現(xiàn)耕地,同時與耕作升降控制手柄配合操作完成機具的升降。

表1 乘坐式履帶耕整機性能參數(shù)Table 1 Performance parameter of the riding type crawler tillage machine
2 試驗
試驗主要根據(jù)耕整機的耕深、碎土率及耕后平整度3個方面判定其性能。本次試驗在重慶進行,所選土塊為再生稻,倒茬高25~40cm,土壤含水率20%,按普氏土壤分類表其硬度1.1。
2.1 耕深測定
根據(jù)耕整機的測定標(biāo)準(zhǔn)[14],制定耕深測定方法,沿耕整機前進方向,每隔2m左、右兩側(cè)各測定一個點并記錄,并測試耕深,計算耕深平均值,即
(1)
式中di—第i個行程的耕深平均值(cm);
dij—第i個行程中的第j個行程的耕深值(cm);
ni—第i個行程中的測定點數(shù)。
耕深標(biāo)準(zhǔn)差、變異系數(shù)和穩(wěn)定系數(shù)為
(2)
(3)
Ui=1-Vi
(4)
式中Si—第i個行程的耕深標(biāo)準(zhǔn)差(cm);
Vi—第i個行程的耕深變異系數(shù);
Ui—第i個行程的耕深穩(wěn)定性。
第1個工況:Ⅰ擋行走速度0.43km/h,純工作效率0.054hm2/h,其原始測量數(shù)據(jù)見表2,并進行數(shù)據(jù)分析整理。

表2 第1個工況耕深Table 2 The depth of the first condition cm
Ui=1-Vi=95.39%
第2個工況:Ⅱ擋行走速度0.92km/h, 純工作效率0.115hm2/h,其原始測量數(shù)據(jù)見表3,并進行數(shù)據(jù)分析整理。

表3 第2個工況耕深Table 3 The depth of the second condition cm
Ui=1-Vi=94.25%
由試驗可以清晰地看到:不管是Ⅰ擋還是Ⅱ擋耕深都遠(yuǎn)遠(yuǎn)超出了15cm,滿足大部分農(nóng)作物對整地的要求。但由于旋耕機具采用的側(cè)面?zhèn)鲃樱瑐鲃觽?cè)耕深始終比非傳動側(cè)深1.9~2.5cm,這是由于耕作機具側(cè)面?zhèn)鲃硬豢杀苊獾牧觿荨?/p>
2.2 碎土率
農(nóng)藝上對碎土率要求是高于85%,根據(jù)耕整機的碎土率測定標(biāo)準(zhǔn),制定其測定方法,在已耕地上測定0.5m×0.5m面積內(nèi)的全耕層土塊,以最大邊長lmax<4cm的土塊質(zhì)量占其總質(zhì)量的百分比,每個行程測定一個點,并記錄。第1個工況:Ⅰ擋行走速度0.43km/h,純工作效率0.054hm2/h,其原始測量數(shù)據(jù)如表4所示;第2個工況:Ⅱ擋行走速度0.92km/h, 純工作效率0.115hm2/h,其原始測量數(shù)據(jù)如表5所示。
由表4和表5可知:Ⅰ擋由于行走速度慢,其碎土效果明顯優(yōu)于Ⅱ擋;耕整機的碎土率穩(wěn)定在90%以上,滿足農(nóng)作物對碎土率的要求。

表4 第1個工況碎土率Table 4 The rate of broken soil of the first condition /cm

表5 第2個工況碎土率Table 5 The rate of broken soil of the first condition /cm
2.3 耕后平整度
農(nóng)藝上對耕后平整度旱地落差不超過8cm,水田落差不超過5cm。根據(jù)耕整機的耕后平整度測定標(biāo)準(zhǔn),制定其測定方法,延垂直于機組前進方向,在地表最高點取一水平基準(zhǔn)線,在1個行程上取與耕寬一致的寬度,分成10等分,每個行程取3個測定,并記錄原始數(shù)據(jù)。第1個工況:Ⅰ擋行走速度0.43km/h,純工作效率0.054hm2/h,其原始測量數(shù)據(jù)如表6所示;第2個工況:Ⅱ擋行走速度0.92km/h, 純工作效率0.115hm2/h,其原始測量數(shù)據(jù)如表7所示。

表6 耕后平整度Table 6 The flatness after ploughing of the first condition cm

表7 耕后平整度Table 7 The flatness after ploughing of the first condition cm
由表6和表7求得在第1工況下,耕后平整度均值為2.70cm,標(biāo)準(zhǔn)差為0.385;在第二工況下耕后平整度均值為3.74cm,標(biāo)準(zhǔn)差為0.513。由此可知:耕后平整度旱地落差均不超過5cm,滿足農(nóng)藝要求;Ⅰ擋由于行走速度慢,其平整度效果明顯優(yōu)于Ⅱ擋。
3 結(jié)論
1)耕整機動力匹配合理,操作簡便符合人機工程。
2)耕深、碎土率和耕后平整度均滿足多數(shù)農(nóng)作物種植的農(nóng)藝要求。
3)在耕作黏度大的旱地使用Ⅰ擋進行耕作效果更為佳;對于水田使用Ⅱ擋,即可滿足農(nóng)藝上的要求也可以提高耕作效率,經(jīng)濟性好。
[1] 曾晨,李兵,李尚慶,等.1WG-63型微耕機的設(shè)計與實驗研究[J].農(nóng)機化研究,2016,39(1):132-137.
[2] 楊學(xué)軍,韓濤,白玉成,等.我國微耕機發(fā)展現(xiàn)狀及發(fā)展趨勢[J].農(nóng)業(yè)機械,2002(7):20-22.
[3] 李志紅,包長春,李錦澤,等.我國微型耕作機發(fā)展?fàn)顩r的研究[J].農(nóng)機化研究,2008(9):215-217.
[4] 趙剡水,楊為民.農(nóng)業(yè)拖拉機技術(shù)發(fā)展觀察[J].農(nóng)業(yè)機械學(xué)報,2010,41(6):42-48.
[5] 陸根源,凌桐森,盧振洲,等.國外大馬力拖拉機發(fā)展?fàn)顩r[C]//大馬力拖拉機機配套農(nóng)具學(xué)術(shù)討論會論文選登,1994-2016:1-10.
[6] 趙真,王帥.國內(nèi)外拖拉機發(fā)展現(xiàn)狀及趨勢[J].農(nóng)業(yè)科技與裝備,2012(12):81-82.
[7] 陳建,陳川,陳洪.西南地區(qū)微耕機面臨的三大新挑戰(zhàn)及對策探討[J].農(nóng)機化研究,2012,34(5):245-248.
[8] 鄢曉娟.微耕機安全事故預(yù)防[J].四川農(nóng)業(yè)與農(nóng)機,2012(5):35.
[9] 暢雄勃.微耕機安全生產(chǎn)問題和建議[J].農(nóng)機化研究,2015,37(9):254-258.
[10] GB10395.10-2006,農(nóng)林拖拉機和機械安全技術(shù)要求第10部分:手扶(微型)耕耘機[S].北京:中國標(biāo)準(zhǔn)出版社,2006.
[11] JB/T10266-2013,微型耕耘機[S].北京:機械工業(yè)出版社,2013.
[12] NY2189-2012,微耕機安全技術(shù)要求[S].北京:中國農(nóng)業(yè)出版社,2006.
[13] DG/T006-2012,微耕機[S].北京:中國農(nóng)業(yè)出版社,2012.
[14] GB/T5668-2008,旋耕機[S].北京:中國標(biāo)準(zhǔn)出版社,2012.
