自適應移動轉向多功能園林修剪機械設計
2018-03-28 00:49:39倪江楠朱西方
農機化研究 2018年3期
倪江楠,朱西方
(河南工業職業技術學院,河南 南陽 473000)
0 引言
自主導航技術研究的一個重要方向是避障功能,要想使農機作業有效地自主避開障礙物,首先是要對障礙物的距離、尺寸類型等進行檢測[1-3]。雖然,這項技術進行了大量的研究,從不同環境模型到不同類型的傳感器,但是完全實用性的產品還沒有出現,其技術也有待于進一步提高[4]。在農機自主導航方面,要想實現路徑規劃和避障功能,必須使農機本身攜帶的傳感器具有障礙物信息識別功能[5-7]。近年來,隨著激光雷達技術的不斷發展,激光傳感器可以為導航提供精度更高的信息;并且信息精度較高,由此在移動自主導航機械中使用的也越來越多,將其使用在園林修剪機械的自主導航系統中,可以有效地提高系統的性能[8-12]。
1 園林修剪機械激光傳感器定位系統設計
采用激光導航具有測量范圍大、光束直徑小、測量精度高等優點,且激光雷達作業時不受環境的影響,在光線不好的環境中依然能保持較高的測量精度,因此在農業中也開始被越來越廣泛的應用由于園林枝葉修剪屬于精細作業,作業速度慢,勞動強度大,其自動化作業需求較大。人工園林的枝葉修剪作業如圖1所示。

圖1 人工園林修剪作業場景圖Fig.1 The scene graph of pruning operation of artificial garden
采用人工作業,修剪過程較慢、作業強度較高,但園林修剪作業又往往是行列較為整齊的樹木,如果采用自動轉向換行的修剪機械,可以大大地降低人工作業的勞動強度[15-19]。本文設計了一種基于激光傳感器的自適應移動和轉向修剪機械,其作業流程如圖2所示。
根據激光測距自適應移動轉向修剪機械的作業流程,設計了該機械作業裝置的整體框架,主要包括PC處理器、激光發射和接收裝置,以及CPLD時間間隔計時器等,如圖3所示。
激光測距自適應轉向系統采用脈沖開關實現PC機的自動復位,實現自適應功能,通過CPLD計時部分完成裝置的自動化控制,最后將控制結果通過顯示器實時顯示[20-23]。
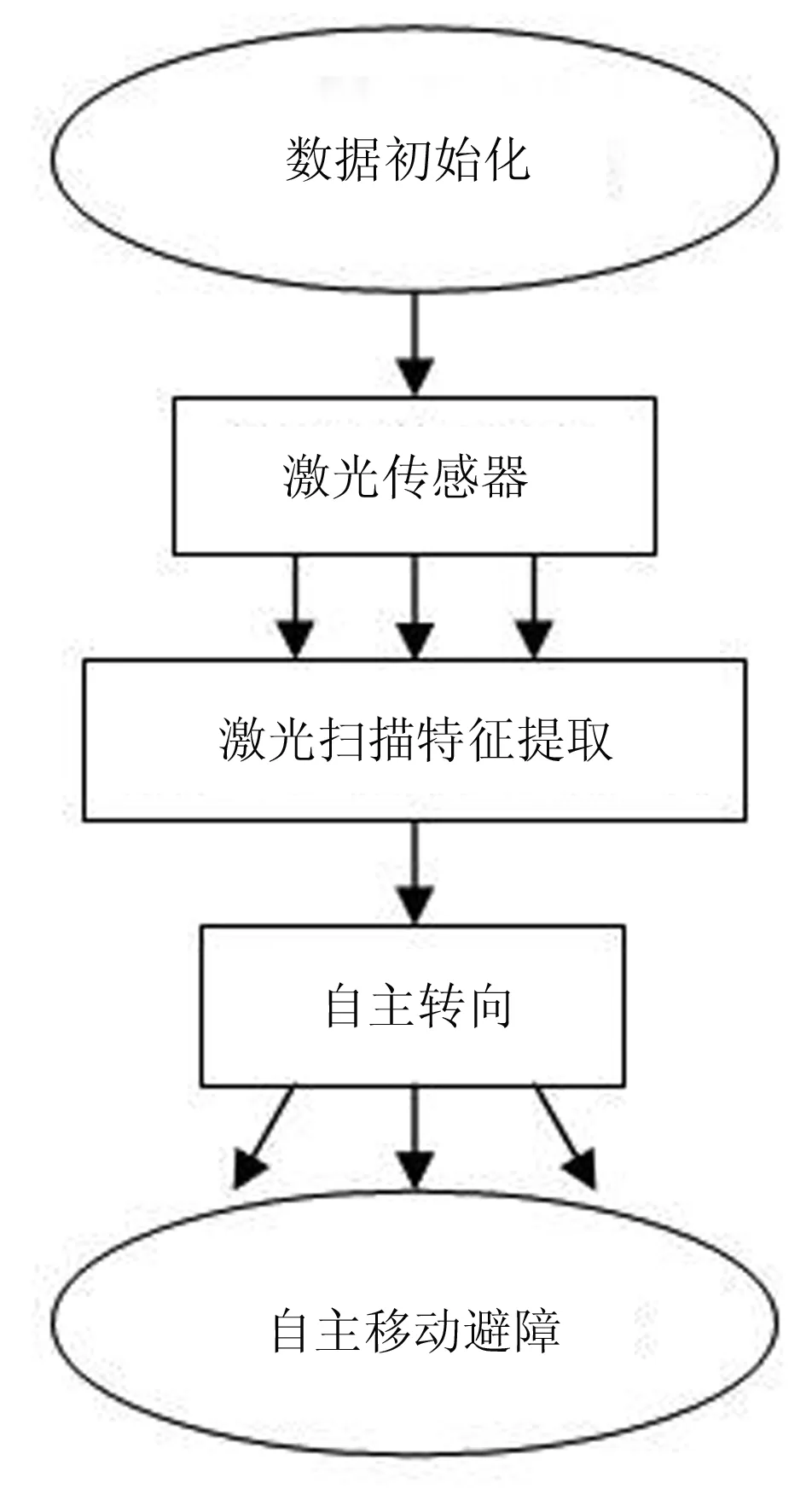
圖2 自適應移動轉向流程圖Fig.2 The flow chart of adaptive moving steering
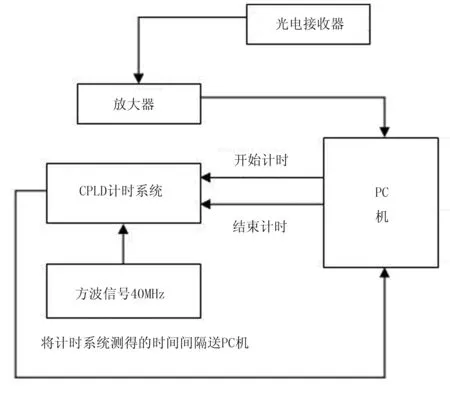
圖3 激光測距自適應轉向系統框架Fig.3 The adaptive steering system framework of laser ranging
2 激光測距和自適應移動轉向原理
園林修剪機械的自適應移動轉向主要依據激光測距和掃描原理,激光測距的原理比較簡單[24-29]。假設激光發射器發出的激光在空氣中的傳播速度是V,其傳播過程如圖4所示。
當激光達到障礙物時會被反射回來,并被光電探測器接收,發射和接收共使用的時間為T,則測量距離為
S=VT/2
(1)
激光光強按高斯均勻分布,假設激光發射器的峰值功率為TtPt,發射的激光束的立體角為Ωt,激光的傳送距離為R,由此可以得到激光在輻射被測物體上的照度為
(2)
其中,Ta是表示激光在傳輸過程中每傳送距離為R時的大氣透過率,則

(3)
其中,σ(λSRv)為大氣消光系數。假定被測得的障礙物時理想的滿反射體,則其可以作為二次輻射源,輻射亮度與出射照度之間的關系為
(4)
若被測障礙物的漫反射率為ρ,則目標的輻射出射度為Mm=ρEt,于是被測障礙物的輻射亮度為
(5)
在實際測量障礙物時,可以利用激光掃描得到的輻射亮度,判斷障礙物的具體尺寸,然后結合距離信息,調整園林修剪機械的位姿和狀態,為了提高測量精度,還需要使用激光放大器。
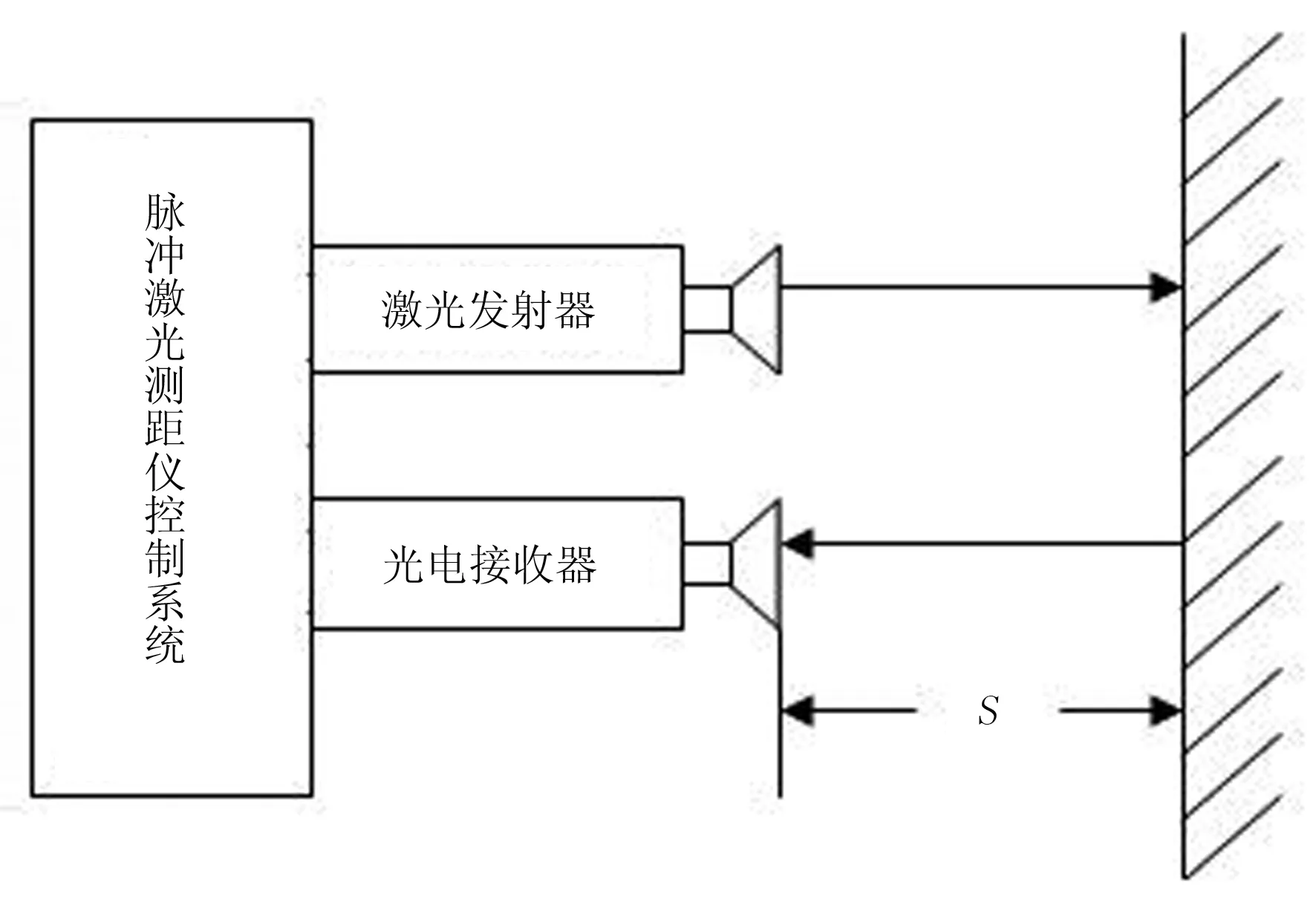
圖4 激光測距原理圖Fig.4 The schematic diagram of laser ranging
如圖5所示:激光信號能量主要集中在一定的頻帶范圍內,在實際使用時,可以根據障礙物可能的尺寸,選用合適的信號放大器。
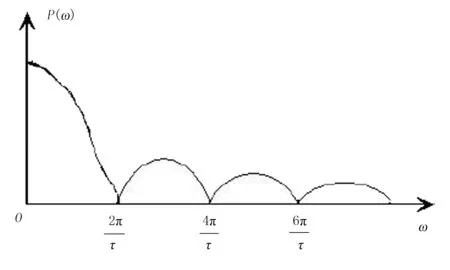
圖5 激光信號功率譜密度Fig.5 The power spectral density of laster signal
圖6為園林修剪機械激光自適應移動轉向原理的框架結構圖。園林修剪機械的移動和避障主要依據激光雷達的測距和掃描獲取障礙物的信息,然后通過地圖坐標和自身位置坐標的測試,預測自身距離。通過獲取的障礙物距離和特征尺寸信息,園林修剪機械通過調整轉向和移動距離,躲避障礙物,并實現自主轉向和換行功能。
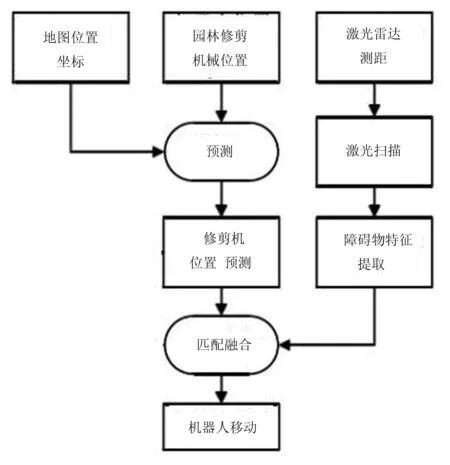
圖6 園林修剪機械激光自適應移動轉向原理Fig.6 The principle of laser adaptive moving steering in garden pruning machine
3 修剪機械自適應移動轉向性能測試
為了驗證激光傳感器在自適應移動轉向性能上使用的可行性,首先對基于激光傳感器的自適應移動轉向裝置進行了實驗測試,測試儀器主要分為PC機和激光發射與接收裝置,如圖7所示。當前方出現障礙物時,通過激光掃描,PC機對障礙物的距離和尺寸信息進行自動識別,從而判斷出需要移動的距離和轉向的角度。通過激光掃描得到的環境數據如圖8所示。

圖7 激光測距移動轉向測試Fig.7 The mobile steering test of laser ranging
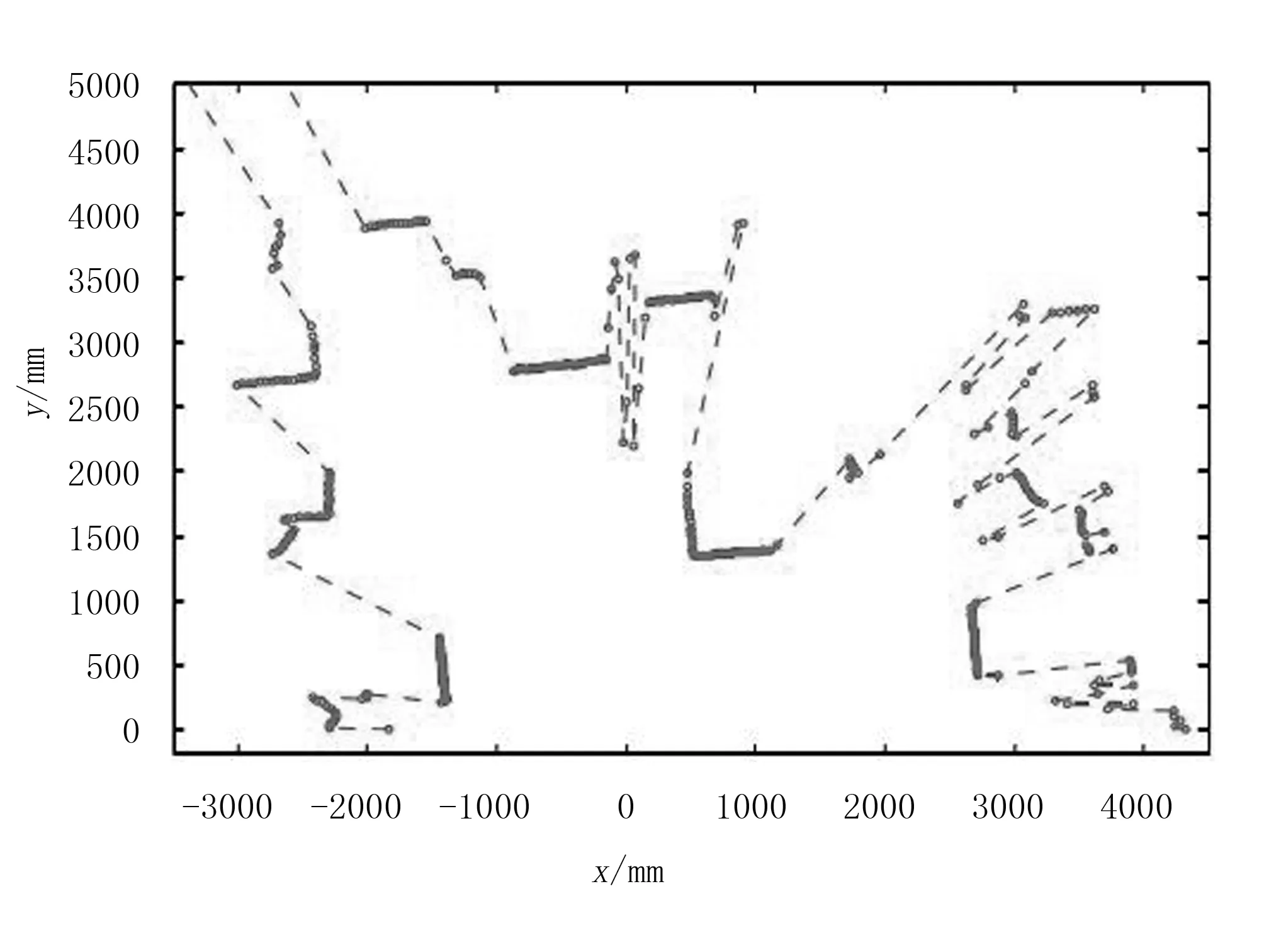
圖8 激光掃描得到的數據Fig.8 The data obtained by laser scanning
利用PC機可以對數據進行最小二乘法擬合,利用擬合特征曲線可以得到障礙物的特征信息。由掃描數據可知,該設備可以有效地對環境進行掃描,得到障礙物的相關尺寸數據,其使用在園林修剪機械設備上進行自適應移動和轉向導航是可行的。
將自主移動轉向導航設備安裝在園林修剪機上作進一步的測試(見圖9),為了驗證激光傳感器自動作業機成功避障轉向率與傳統園林修剪機相比較的優勢,進行了多次實驗對比,得到了如表1所示的結果。

圖9 園林修剪機自動作業測試Fig.9 The automatic work testing of garden pruning machine表1 園林修剪機自適應移動轉向作業性能測試 Table 1 The performance test of adaptive shift steering for garden pruning machine
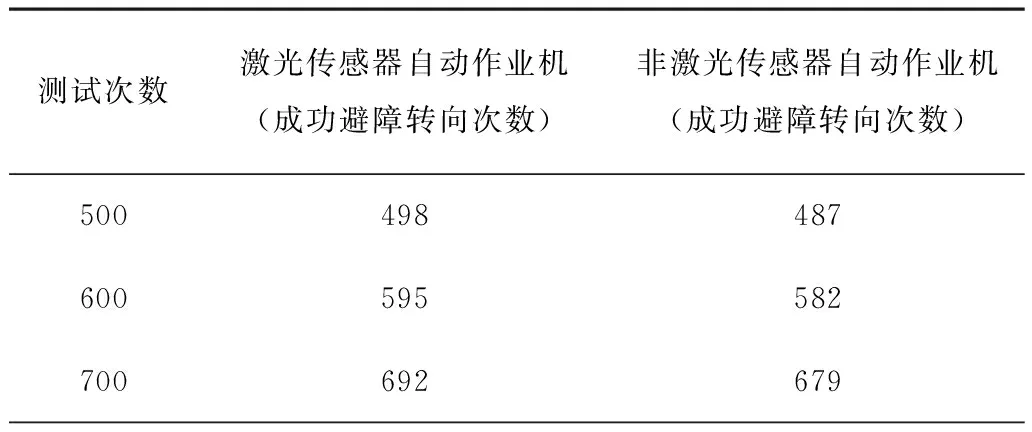
測試次數激光傳感器自動作業機(成功避障轉向次數)非激光傳感器自動作業機(成功避障轉向次數)500498487600595582700692679
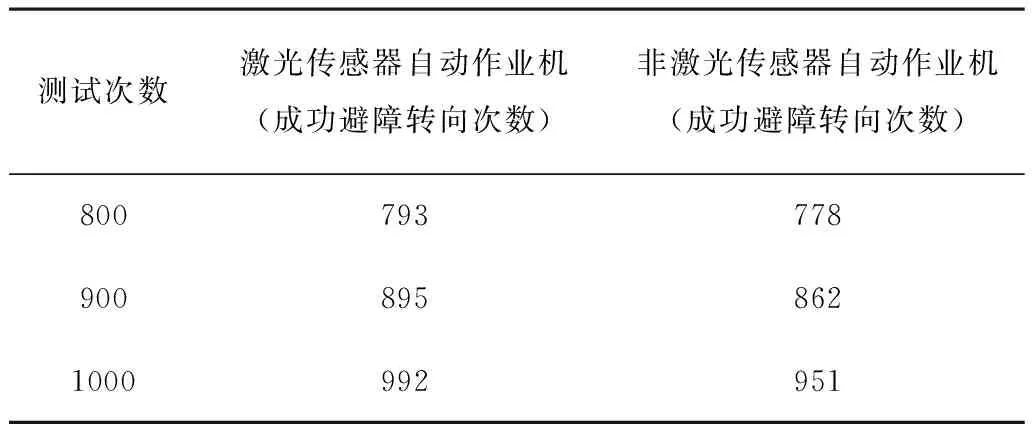
續表1
由表1對比結果可以發現:采用激光傳感器自適應移動轉向的修剪作業機,其成功避障的次數要明顯高于非激光傳感器,且隨著測試次數的增加,其穩定性好,滿足園林修剪機械自主導航的設計需要。
4 結論
將激光傳感器引入到了園林修剪機械定位導航系統中,并設計了自適應移動和轉向方案,通過激光測距和障礙物特征掃描,實現了修剪機械的自動化定位、避障和換行等作業能力。根據激光測距和掃描原理,設計了激光傳感器自適應移動和轉向裝置,并通過試驗驗證了作業環境的激光掃描功能。最后,對激光傳感器自適應移動和轉向的精度進行了測試,并將其與傳統的導航定位裝置進行了對比。測試結果表明:采用激光傳感器自主移動和轉向系統,成功避障的準確性和穩定性都有所提高,可以滿足園林修剪機械的作業需求。
[1] 王海青,姬長英,顧寶興,等.基于機器視覺和支持向量機的溫室黃瓜識別[J].農業機械學報,2012,43(3): 163-167.
[2] 王輝,毛文華,劉剛,等.基于視覺組合的蘋果作業機器人識別與定位[J].農業機械學報,2012,43(12): 165-170.
[3] 魏澤鼎,賈俊國,王占永.基于視覺傳感器的棉花果實定位方法[J].農機化研究,2012,34(6):66-68,112.
[4] 高春城.我國農業發展的資源環境問題與展望[J].當代生態農業,2013,3(4):151-154.
[5] 萬寶瑞.當前我國農業發展的趨勢與建議[J].農業經濟問題,2014,4(1):110-114.
[6] 徐茂,鄧蓉.國內外設施農業發展比較[J].北京農學院學報,2014,29(2):75-79.
[7] 劉峰.脈沖半導體激光測距機的研制與應用[J].紅外與激光工程,2003:32(2)118-122.
[8] 彭宇,蘇弘,董成富.一種適用于高速窄脈沖的峰值保持電路[J].核電子學與探測技術,2007,27(2): 254-256.
[9] 馮國旭,常保成.高精度激光測距技術研究[J].激光與紅外,2007,37(11):1137-1140.
[10] 孫杰,潘繼飛.高精度時間間隔測量方法綜述[J].計算機測量與控制,2007,15(2):145-148.
[11] 周武林,岳永堅.基于時幅轉換插入法的脈沖激光測距[J].光電工程,2008,35(7):104-115.
[12] 余冬菊,蘇玉萍.基于 FPGA 的數字 TDC 設計[J].中國科技信息,2008,(8):122-123.
[13] 張延,黃佩誠.高精度時間間隔測量技術與方法[J].天文學進展,2006,23 (1):12-14.
[14] 雷武虎,劉松秋.一種高精度大范圍時間測量電路的實現[J].核電子學與探測技術,2004,24(5):449-452.
[15] 王艷,唐秀芳.基于昆蟲協作機理的分布式無線傳感器網絡節能方法[J].南京理工大學學報,2013,37(6): 826-832.
[16] 張迎勝,單志龍.線性回歸在無線傳感器網絡定位中的應用研究[J].小型微型計算機系統,2014,35(7): 1500-1504.
[17] 趙景堂,杜國明,李秀海.基于總體最小二乘法的二維坐標轉換方法[J].黑龍江工程學院學報,2015,29(1): 21-22.
[18] 陳榮,管吉興,張喜明.數字Costas環的設計與實現[J].無線電工程,2010,40(3):24-26.
[19] 孫言強,王曉東,周興銘.無線網絡中的干擾攻擊[J].軟件學報,2012,23(5):1207-1221.
[20] 何文清,嚴昌榮,劉爽,等.典型棉區地膜應用及污染現狀的研究[J].農業環境科學學報,2009,28(8): 1618-1622.
[21] 王學農,史建新,郭俊先,等.懸掛式棉稈粉碎還田摟膜機摟膜機構的設計與試驗研究[J].農業工程學報,2008,24(1):135-140.
[22] 方磊.我國棉田生態污染及其防治對策[J].安徽農學通報,2007,13(12):56-58.
[23] 任淑英,徐林芳,馬中啟,等.殘膜回收機在皇宮鎮的推廣應用[J].農業農機化,2007(4):15.
[24] 高杰.殘膜回收機發展現狀及存在問題[J].農業機械化,2007(4):180-189.
[25] 劉成蓮.殘膜回收技術的研究與分析[J].農業技術裝備,2009(12):20-21.
[26] 許斯軍,曹奇英.基于可視圖的移動機器人路徑規劃[J].計算機應用與軟件,2011(3):220-222.
[27] 尹建軍,武傳宇,YangSimonX,等.番茄采摘機器人機械臂避障路徑規劃[J].農業機械學報,2012(12):171-175.
[28] 姬偉,程風儀,趙德安,等.基于改進人工勢場的蘋果采摘機器人機械手避障方法[J].農業機械學報,2013(11):253-259.
[29] 周芳,朱齊丹,趙國良.基于改進快速搜索隨機樹法的機械手路徑優化[J].機械工程學報,2011(11):30-35.
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
電腦報(2020年35期)2020-09-17 13:25:53
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
故事大王(2016年7期)2016-09-22 17:30:08
科技知識動漫(2016年8期)2016-07-29 20:40:09
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49
