采摘機器人無線通信系統設計
——基于LTE-advanced與微粒群算法
2018-03-28 00:49:43楊文鉑
農機化研究 2018年3期
鄭 冰,楊文鉑,李 航
(1.河南工業職業技術學院,河南 南陽 473000;2.南陽道路運輸管理局,河南 南陽 473000)
0 引言
近年來,隨著網絡技術、集成技術和智能化程度的逐漸提高,人們對通信的要求越來越高,網絡成為必不可少的傳輸手段[1]。由于網絡所需覆蓋大幅度增大,有線網絡技術難以滿足需求,因而無線通訊技術迎來了快速發展,農業領域也正逐漸向農業無線通信轉型[2-5]。本文以LTE-Advanced和微粒群算法為通信路徑搭建了采摘機器人無線通信系統,采用高效的質效控制和通信協議,很大程度提高了網絡可靠性和穩定性。
1 微粒群算法
微粒群算法起初只是為了將鳥群毫無規律的覓食路徑采取圖形化的方式展現出來[6-7]。該算法是20世紀末期由美國社會研究學家James Kennedy和電氣工程師Russell Eberhart一起研究提出的[8-10]。其主旨來源于兩人早期對鳥類行為進行研究得到的想法,他們根據鳥群外出尋找食物的復雜情形,并結合生物種群聚集模型,對鳥群設計了特定的運動規則,模擬和設計了鳥群隨機無規則的運動仿真模型。試驗結果表明,該模型在多維空間中具有非常強大的優化能力[11]。微粒群算法中包含多個沒有質量和體積大小的粒子,這些粒子可以看作成能互相傳遞數據信息且具有一定記憶的個體,在仿真時,可以在目標空間中隨意改變移動方向和速度[12-15]。
在三維空間中,鳥群運動軌跡優化目標解能夠被空間粒子運動位置進行演算[16]。在某一時間節點粒子位置xi(t)可由前一時間節點xi(t-1)和速度vi(t)表示,即
xi(t)=xi(t-1)+vi(t)
(1)
其中,i表示第i個粒子。
在整個仿真過程中,每個粒子運動軌跡都需要求得最優解的一個可行解,因此粒子可以根據自己的記憶,將最好的pwelli記錄下來并將信息與其他粒子進行分享;然后在所有的pwelli中尋找最好的點,即當前發現的最優目標解,記為gwelli。粒子的移動速度會收到將受到gwelli的影響,并不斷逼近該點,速度計算公式為
vi(t)=w·vi(t-1)+c·rand·[gwelli-xi(t-1)]
(2)
其中,w為慣性因子;c為加速因子,rand為[0,1]間的一隨機數。在三維空間中的微粒群算法的流程如圖1所示。
微粒群算法的具體過程為:
Step1,對微粒群算法進行初始化。
Step2,制定粒子自適應函數。
Step3,尋找記錄當前最優點gwell。
Step4,更新當前次數的pwelli與最優點gwelli作比較,如果優于gwelli則進行一次更新。
Step5,判斷是否已經達到初始化設定的最大迭代次數,若未達到則返回Step2繼續操作,否則結束本輪尋優。
Step6,結束,輸出并保存最優點gwelli。
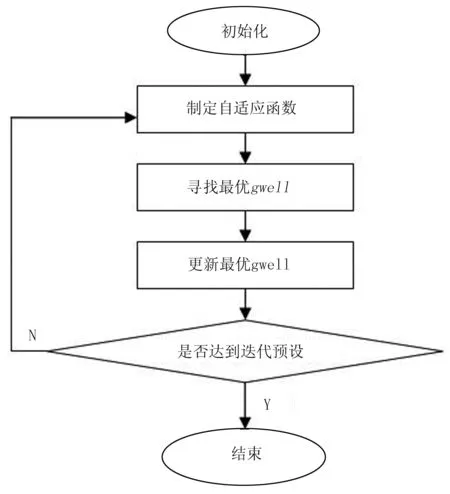
圖1 微粒群算法流程圖Fig.1 The flow chart of particle swarm optimization algorithm
2 LTE-Advanced技術
2.1 LTE-Advanced技術概述
近年來,隨著通訊和網絡技術的快速發展,移動通信系統升級速度越來越快,LTE-Advanced通信系統應運而生[17-21]。LTE-Advanced 作為第四代通信系統核心技術之一,是一項具有我國自主知識產權的技術,其結合OFDM、MIMO及64QAM調制等多項高新技術,使其在傳輸速率、頻譜利用率和傳輸時延等方面獲得了更加的進步,在技術由于網絡覆蓋面廣,適合移動跨區跨站點作業,因此適合在采摘機器人無線通信系統中使用[22-23]。LTE-Advanced通信系統的性能需求如表1所示。
2.2 LTE-Advanced系統架構
與一般的蜂窩移動網絡采取的信號交換電路不同,LTE-Advanced系統只支持分組交換業務,也就是在數據分組中與用戶對象建立無縫的信息傳遞機制[24]。因此,分組系統演進成了更高級別的演進分組系統,包括演進的分組交換核心網和演進的接入網E-UTRAN。LTE-Advanced系統架構如圖2所示。

表1 LTE-Advanced通信系統的性能Table 1 The performance of LTE-Advanced communication system
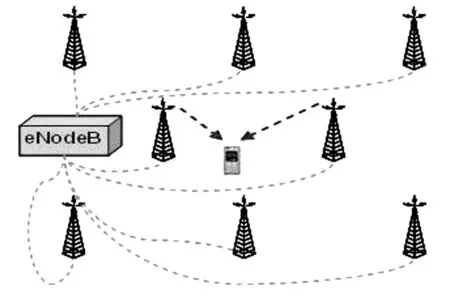
圖2 LTE-advanced系統架構圖Fig.2 The architecture diagram of LTE-Advanced system
3 采摘機器人無線通信系統的設計
3.1 采摘機器人感知系統的設計
感知系統相當于人類的眼睛和手腳,使沒有視覺和觸覺的采摘機器人通過感知系統獲取豐富的數據信息,然后作出正確的判斷。該感知系統主要包括視覺、位置和避障3類傳感器[25],如圖3所示。
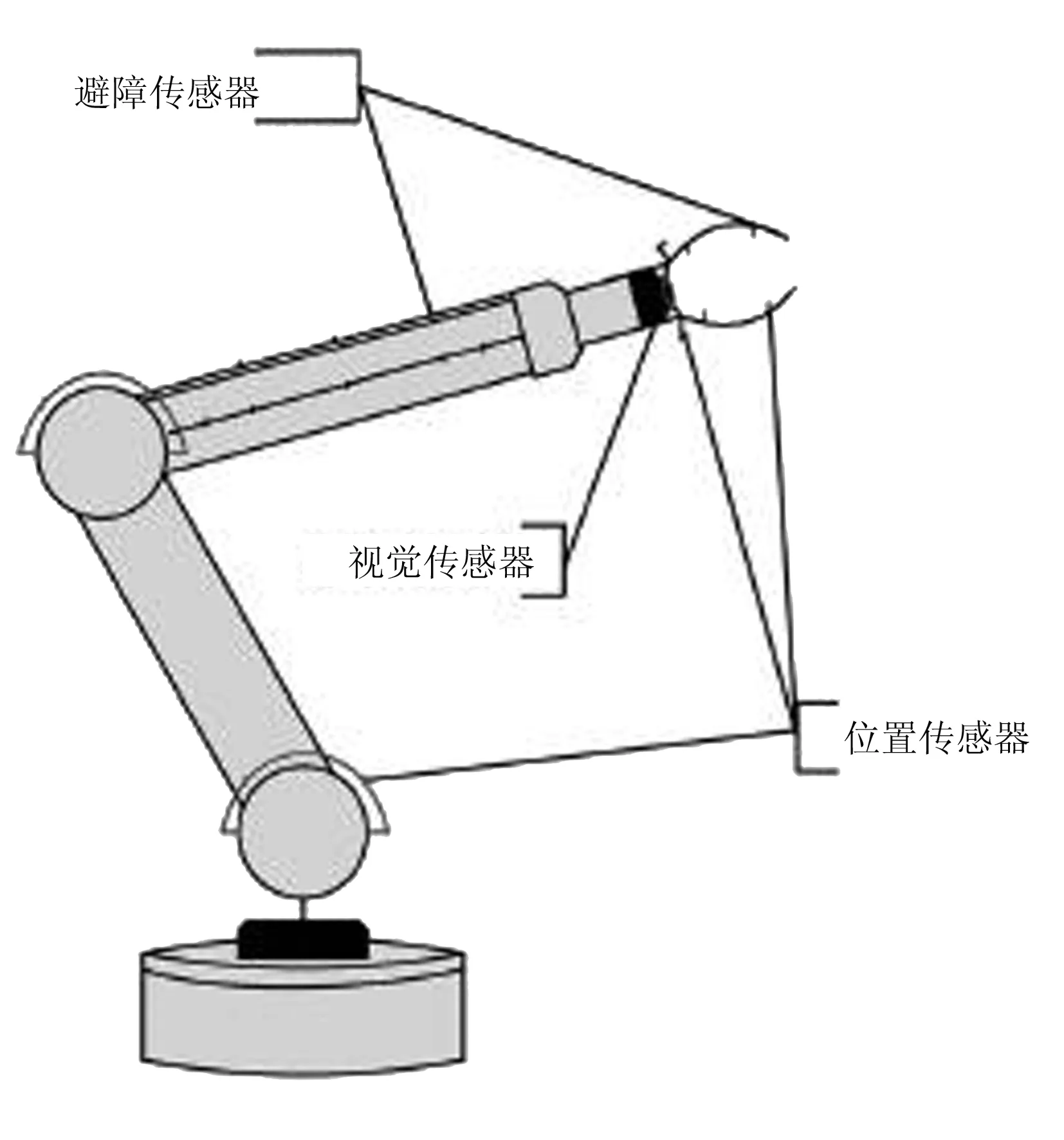
圖3 采摘機器人感知系統Fig.3 The perception system of picking robot
視覺傳感器主要是進行圖像的捕獲及位置的校驗,然后將結果傳送到機器人控制系統;位置傳感器是利用旋轉關節和霍爾傳感器得到機器人的直行進程,獲取機器位置信息;避障傳感器安裝在末端執行器上,通過力敏電阻獲取碰撞信息,然后讓機器人在作業中有效躲避障礙。
3.2 無線通信系統軟硬件設計
無線通信系統硬件需要滿足數據傳輸速率、通信距離、發射功率、綜合承載能力、丟包率、誤碼率和低功耗等要求,其結構框架如圖4所示。無線通信系統包括通信主站和從站兩方面。主站由控制計算機、處理器和無線網絡控制器(RNC)組成,這幾部分通過 USB 有線傳輸數據信息;從站則由視覺、避障、位置3類傳感器和無線網絡控制器(RNC)構成。主站通過基站接收從站發回的數據及控制信息,實現采摘機器人的無線通信。
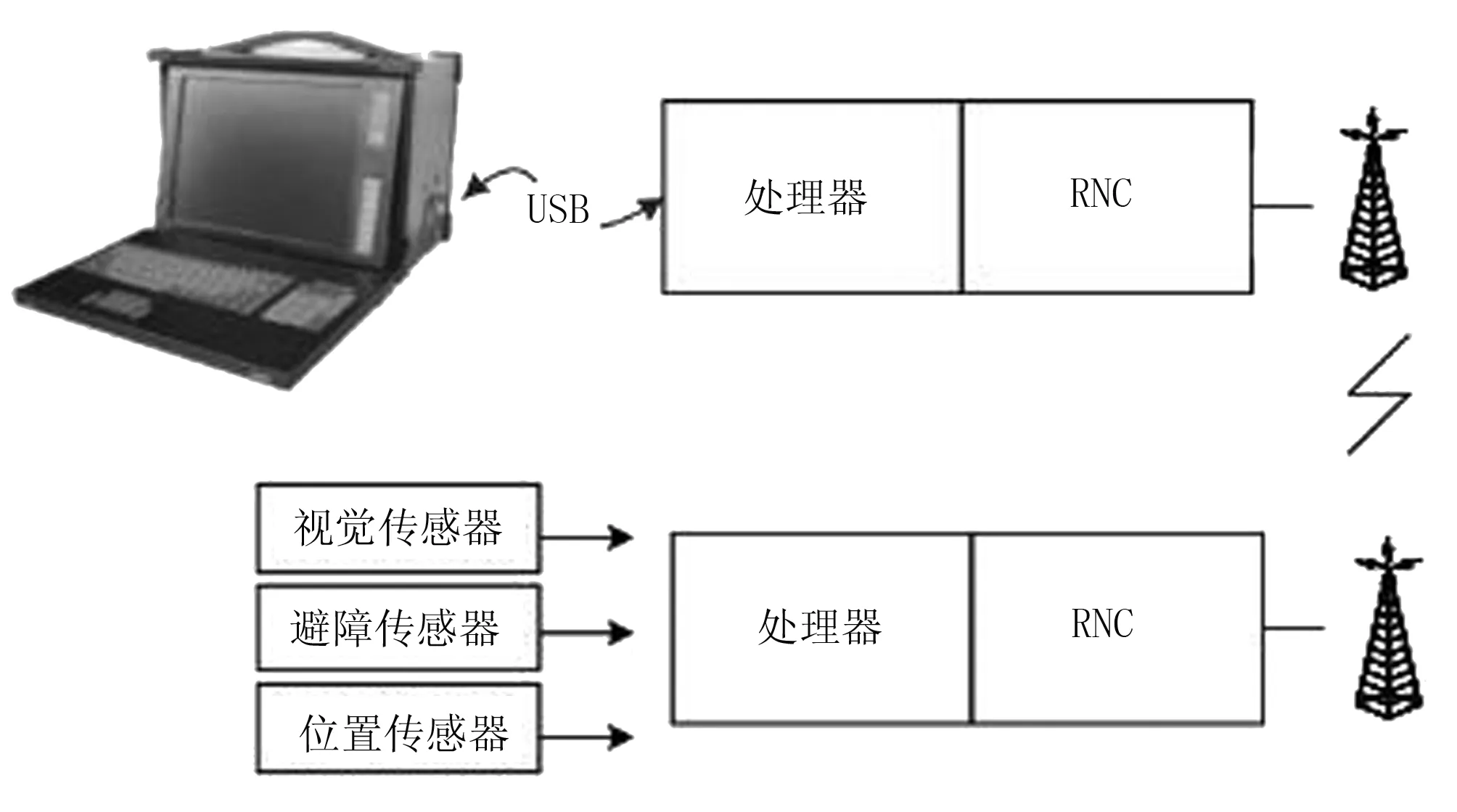
圖4 無線通信系統硬件框架Fig.4 The hardware framework of wireless communication system
無線通信系統軟件部分主從機數據接發都采用中斷服務程序機制,具有成本低、數據延時小、實時性高等特點。該系統軟件包括main、數據接收、數據發送、接收中斷服務和發送中斷服務等子程序。發送程序和接收采用模塊化方式,由main系統主程序直接調用,發送中斷服務程序是在數據接收同步后開始發送數據信息,而接收中斷服務程序是先發送文件然后再等應答信號。采摘機器人無線通信系統流程如圖5所示。
3.3 無線通信系統數據質效與協議
采摘機器人無線通信系統需要實時、有效地進行數據信息的發送與接收,因此要求系統具有高傳輸速率、足夠遠的通信距離、低丟包率和低誤碼率[26]。但是,由于采摘機器人工作環境惡劣,工作場所變換速度快,且其本身控制系統復雜,可能會給數據信息的發送和接收造成干擾,影響無線通信系統的的通信距離和丟包率。為了確保該系統數據發送和接收的準確性,需要對其進行質效控制。而數據傳輸協議則是根據采摘機器人自身信息傳送情況設定某種特定協議確保鏈路數據準確無誤地進行傳輸。

圖5 無線通信系統軟件流程圖Fig.5 The software flow chart of wireless communication system
3.3.1 質效控制
影響無線數據傳輸的主要因素除了環境、磁場、天氣這些外在因素之外,還有通信距離、發射功率、綜合承載能力及系統抗干擾能力等自身因素;也還有地面對電波傳輸的影響,這部分主要是地形起伏、植物、任意尺寸的人造結構和作業海拔等對信號的遮擋。此外,基站的類型及其對信號的傳輸能力和基站的高度也是影響無線傳輸的重要因素[27]。因此,提高基站的增益和水平高度,就能提高通信系統的質量和距離。對采摘機器人無限通信系統而言,質效控制主要在于優化自身參數和采用跳頻傳輸機制。
該無線通信系統優化自身參數,首先是對頻率、發射功率和綜合承載能力等3方面進行優化。工作頻段設定為433 MHz,而系統發射功率和綜合承載能力則與信號傳送的距離息息相關。發射功率大,則信號傳播的遠,信號傳送的距離也大;綜合承載能力反應的是主機獲取微弱信號的能力,該值越大,通信距離越大。在三維空間中,無線通信傳送距離公式為
[Ls]=32.44+20lgd+20lgf
(3)
其中,[Ls]為傳輸損耗(dB);d為傳輸距離(km);f為工作頻率(MHz)。
根據式(3)和工作頻率433MHz下的發射頻率和綜合承載能力,計算出的傳輸距離為2.4 km。這個計算結果是理想狀態下的值,在實際應用中,由于受到干擾,會使實際值與理論值相差甚遠。但由于采摘機器人無線通信系統主從站都距離較近,即使實際值和理論值存在較大差距,也不會影響其數據信息的傳輸。
3.3.2 通信協議
通信協議對無線通信系統信號的傳遞具有重要的影響,因此設計性能卓越的協議是整個系統的重中之重,而數據包格式又是通信協議設計的重點,無線通信數據的接發都按照數據包裝機制實行。采摘機器人無線通信系統的數據包格式如表2所示。
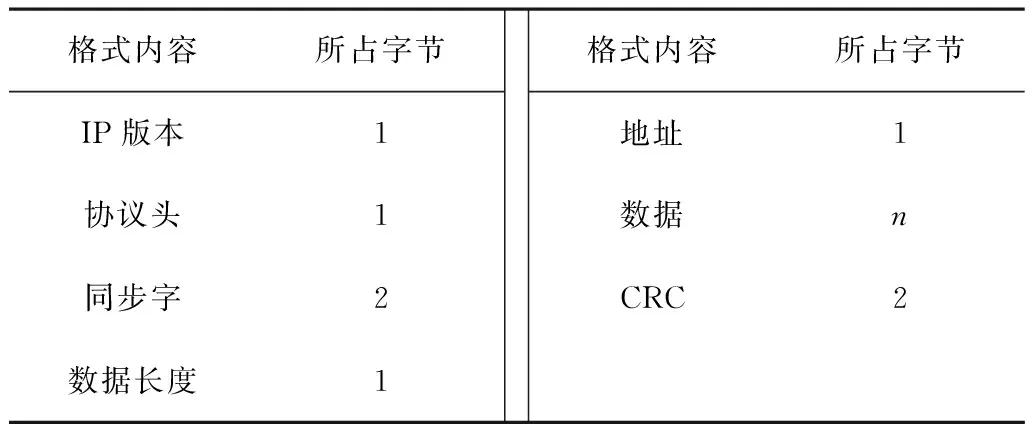
表2 數據包格式Table 2 The digital formats
在數據傳輸過程中,為了減少外在干擾對數據的影響,在傳遞數據信息時,一般在數據中加上1個字節的協議頭。同步字是用來保證數據的發送和接收前雙方通信處于同步狀態。數據長度一般為1個字節,有其他需要時可適當進行調整。數據為傳輸過程中的有效數據,也就是采摘機器人無線通信系統中的感知信息。CRC16是校驗值,用來判斷數據傳輸的正確性。
4 測試結果與分析
無線通信系統設計和實現后,需要對數據傳輸進行一系列的測試,以便確定系統設計是否合理準確。因此,為了測試該無線通信系統性能是否滿足采摘機器人長時間工作要求以及驗證該系統的可行性和有效性,特在某水果種植園進行了實際測試。采摘機器人無線通信系統數據傳輸的一組隨機試驗情況,如表3所示。

表3 采摘機器人無線通信系統測試數據Table 3 The test data of wireless communication system for picking robot
試驗條件如下:作業環境為強磁干擾;基站增益為3 dB ;數據傳輸速率為1.2 Mbps;數據長度為1M。
從表3可以得出:在整個數據傳輸試驗中,無線通信系統在質效控制和通信協議措施下,丟包率為0,說明制定的傳輸協議合理,數據能夠準確高速的接發。在測試中,數據傳送差錯表現為誤碼率,但也比較低,沒有給通信過程帶來干擾。經分析可知:此采摘機器人數據傳輸率較高、CBTC傳輸延時小、丟包率為0、可靠性強,符合采摘機器人無線通信系統的設計要求。
5 結論
本文以LTE-Advanced和微粒群算法為通信路徑搭建的采摘機器人無線通信系統,采用高效的質效控制和通信協議,通過減少通信協議層數和減少了網元數目,降低了系統故障率,延長了系統維護周期,使網絡部署更加簡單,很大程度地提高了網絡穩定性。測試結果表明:該無線通信系統數據傳輸率較高、CBTC傳輸延時小、丟包率為0、可靠性強,符合采摘機器人無線通信系統的設計要求,對實現果實采摘無人化具有十分重要的意義。
[1] 王振,趙祥模,徐志剛. 無線傳感器網絡(WSN)技術在小型組足球機器人比賽中的應用[J].電子設計工程,2015(14):70-72,76.
[2] 呂家亮,王英龍,毛玉明,等.基于決策思想的微粒群三維定位算法研究[J].計算機仿真,2015(1): 322-326, 348.
[3] 楊本初.面向工業應用的嵌入式無線通信網絡的實時性開發研究[D].西安:西安建筑科技大學,2005.
[4] 田果.基于無線通信網絡的遙操作工程機器人系統控制策略研究[D].廣州:廣東工業大學,2014.
[5] 周渝.農業多機器人系統無線通信技術研究[D].楊凌:西北農林科技大學,2014.
[6] 喬瑩瑩,宋威,馬偉.基于GA優化QPSO算法的文本聚類[J].計算機應用研究,2014(10):2912-2915.
[7] 趙志剛,王偉倩,黃樹運.基于改進粒子群的雙層規劃求解算法[J].計算機科學,2013(S2):115-119.
[8] 曾建潮,崔志華.微粒群算法的統一模型及分析[J]. 計算機研究與發展,2006(1):96-100.
[9] 吳建生,秦發金.基于MATLAB的粒子群優化算法程序設計[J].柳州師專學報,2005(4):103-106.
[10] 楊尹,顧寄南.上下料機器人與數控機床群無線通信系統設計[J].制造業自動化,2012(18):9-10.
[11] 李琴,楊栩灃.一種融合分布估計的離散粒子群優化算法的配電網重構[J].長春工程學院學報:自然科學版,2012(2):43-45.
[12] 劉銀萍.基于PTR6000的足球機器人無線通信系統的設計[J].現代電子技術,2012(9):45-47.
[13] 楊藝.基于微粒群的LTE-Advanced通信系統自適應資源分配算法[D].哈爾濱:哈爾濱工業大學,2011.
[14] 呂繼東,趙德安,姬偉,等.蘋果采摘機器人無線數據傳輸系統[J].農業工程學報,2010(12): 225-230.
[15] 廖小春,姚遠程.小型足球機器人無線通信系統的設計與實現[J].現代電子技術,2010(15):67-70.
[16] 高倩倩,須文波,孫俊. 量子行為粒子群算法在基因聚類中的應用[J].計算機工程與應用,2010(21): 152-155.
[17] 李占坤.果樹采摘機器人控制系統研究與設計[D].鎮江:江蘇大學,2010.
[18] 張敏.基于LTE-Advanced系統的LDPC碼編譯碼算法研究[D].重慶:重慶郵電大學,2010.
[19] 郝武偉,曾建潮.基于聚類分析的隨機微粒群算法[J]. 計算機工程與應用,2010(8):40-44.
[20] 侯志宏.LTE/LTE-Advanced鏈路級若干關鍵技術仿真研究[D].北京:北京郵電大學,2010.
[21] 馮宇,于竹林.基于嵌入式移動機器人無線通訊系統的實現[J].電子科技,2009(7):66-68.
[22] 胡宏梅,董恩清.基于粒子群算法的碼書設計研究[J]. 微電子學與計算機,2009(1):97-100.
[23] 邱鐵,李哲,司偉生.基于無線通信的嵌入式機器人控制系統設計[J].國外電子元器件,2008(8):3-5.
[24] 劉鋒,黃志斌,李麗娟,等.一種啟發式粒子群優化算法(HPSO)及其在結構優化設計中的應用[J]. 應用基礎與工程科學學報,2008(1):57-64.
[25] 彭日亮,楊宜民,王赟. 基于PTR4000的足球機器人無線通信子系統的設計[J].計算機工程與應用, 2007(17):108-110.
[26] 徐琰.基于無線局域網的消防偵察機器人通信系統設計[J]. 機械,2006(6):7-8,11.
[27] 王云剛,陳繼榮,陳保林.網絡控制機器人無線通信系統的設計[J].計算機工程與應用,2006(17):123-126.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
