基于電機(jī)直驅(qū)的玉米播種機(jī)控制系統(tǒng)的設(shè)計(jì)
2018-03-28 00:49:50刁培松程衛(wèi)東
農(nóng)機(jī)化研究 2018年3期
賈 昊,刁培松,程衛(wèi)東,張 將
(山東理工大學(xué) 農(nóng)業(yè)工程與食品科學(xué)學(xué)院,山東 淄博 255049)
0 引言
從目前已通過(guò)省部級(jí)鑒定和大量推廣應(yīng)用的播種機(jī)看,主要分為氣力式和機(jī)械式兩大類。從結(jié)構(gòu)形式來(lái)看,氣力式排種器有氣吸式、氣壓式、氣吹式及氣力與機(jī)械組合式達(dá)10 余種之多;機(jī)械式排種器更是種類繁多,常用的有垂直圓盤(pán)側(cè)充式、水平圓盤(pán)、傾斜圓盤(pán)、窩眼輪式和窩眼刷種輪式等30余種。國(guó)外發(fā)達(dá)國(guó)家對(duì)精密播種機(jī)播種的研究起步比較早,20世紀(jì)80年代中期,國(guó)外農(nóng)業(yè)研究人員便開(kāi)始研究電子控制的排種裝置,目前國(guó)外關(guān)于電子控制的排種裝置的研究日益成熟,已經(jīng)開(kāi)始廣泛推廣。現(xiàn)階段國(guó)內(nèi)對(duì)于精密播種機(jī)的研究與發(fā)達(dá)國(guó)家相比還有一定差距,且大部分研究多集中在故障監(jiān)測(cè)及報(bào)警方面,而精密播種機(jī)因地輪打滑造成的不均勻播種問(wèn)題仍未得到解決。雖然已經(jīng)研發(fā)了部分排種控制系統(tǒng),但其在實(shí)用化方面還存在很多問(wèn)題,特別是基于電機(jī)驅(qū)動(dòng)的播種機(jī)排種控制和基于計(jì)算機(jī)系統(tǒng)的排種器性能監(jiān)測(cè)成為提高播種機(jī)作業(yè)質(zhì)量的關(guān)鍵,也是今后對(duì)播種機(jī)研究的主要方向。
目前,國(guó)內(nèi)傳動(dòng)變速結(jié)構(gòu)落后,調(diào)節(jié)使用不便:一是大多數(shù)播種機(jī)仍采用鐵制剛性地輪驅(qū)動(dòng),且直徑偏小,滑移率高; 二是傳動(dòng)軸支撐多采用普通軸承或滑動(dòng)軸承,傳動(dòng)不靈活,阻力大; 三是傳動(dòng)變速( 株距調(diào)節(jié)) 多采用更換鏈輪方式,變速調(diào)節(jié)不便。電動(dòng)執(zhí)行機(jī)構(gòu)特點(diǎn):①體積小、動(dòng)作快反應(yīng)快、過(guò)載能力大、調(diào)速范圍寬;②低速力矩大, 波動(dòng)小,運(yùn)行平穩(wěn);③低噪音,高效率;④后端編碼器反饋(選配)構(gòu)成直流伺服等優(yōu)點(diǎn);⑤變壓范圍大,頻率可調(diào)[1-3]。
1 控制系統(tǒng)總體方案設(shè)計(jì)
本株距自適應(yīng)玉米免耕播種機(jī)由車載觸控、導(dǎo)航移動(dòng)站、控制盒、終端盒、伺服無(wú)極變速器和播種單體構(gòu)成,如圖1所示。
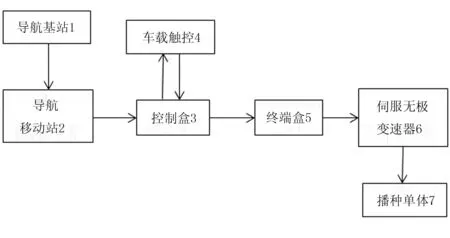
圖1 方案設(shè)計(jì)Fig.1 Scheme and design
工作時(shí),由移動(dòng)站接受來(lái)自基站的報(bào)文,并將報(bào)文傳遞到控制盒內(nèi)的可編程控制器(PLC);PLC將報(bào)文中的位置與速度信息讀取并存儲(chǔ),通過(guò)車載觸控輸入的數(shù)據(jù)與控制器不同的算法向終端盒發(fā)送指令;同時(shí),PLC將各種信息傳回車載觸控顯示給用戶,可編程控制器(PLC)控制伺服無(wú)極變速器依據(jù)行進(jìn)速度改變播種單體的播種盤(pán)轉(zhuǎn)速,從而達(dá)到變量播種的目的。本播種機(jī)具有體積小、動(dòng)作快反應(yīng)快、過(guò)載能力大、調(diào)速范圍寬、波動(dòng)小、運(yùn)行平穩(wěn)、低噪音,以及高效率等特點(diǎn)。播種機(jī)的有益效果是能夠通過(guò)現(xiàn)有的導(dǎo)航確定播種機(jī)的播種速度與位置,實(shí)現(xiàn)播種株距自適應(yīng)的目的,大大提高了農(nóng)業(yè)現(xiàn)代化水平,方案設(shè)計(jì)如圖1所示。
1.1 控制系統(tǒng)方案
控制系統(tǒng)包括車載觸控、移動(dòng)站、控制盒與伺服無(wú)極變速系統(tǒng)。
基站發(fā)來(lái)的報(bào)文信息通過(guò)移動(dòng)站接受并發(fā)送給控制盒,控制盒內(nèi)的可編程控制器(PLC)進(jìn)行讀取并存儲(chǔ)在響應(yīng)的寄存器內(nèi);車載觸控讀取對(duì)應(yīng)寄存器內(nèi)的數(shù)據(jù)并顯示在界面,可編程控制器(PLC)將速度信號(hào)進(jìn)行處理得出電機(jī)轉(zhuǎn)速,傳遞到各個(gè)播種單體上的驅(qū)動(dòng)盒進(jìn)而調(diào)節(jié)電機(jī)轉(zhuǎn)速,實(shí)現(xiàn)株距自適應(yīng)播種。
1.2 主要性能指標(biāo)和工作參數(shù)
控制系統(tǒng)主要性能指標(biāo)和工作參數(shù),如表1所示。
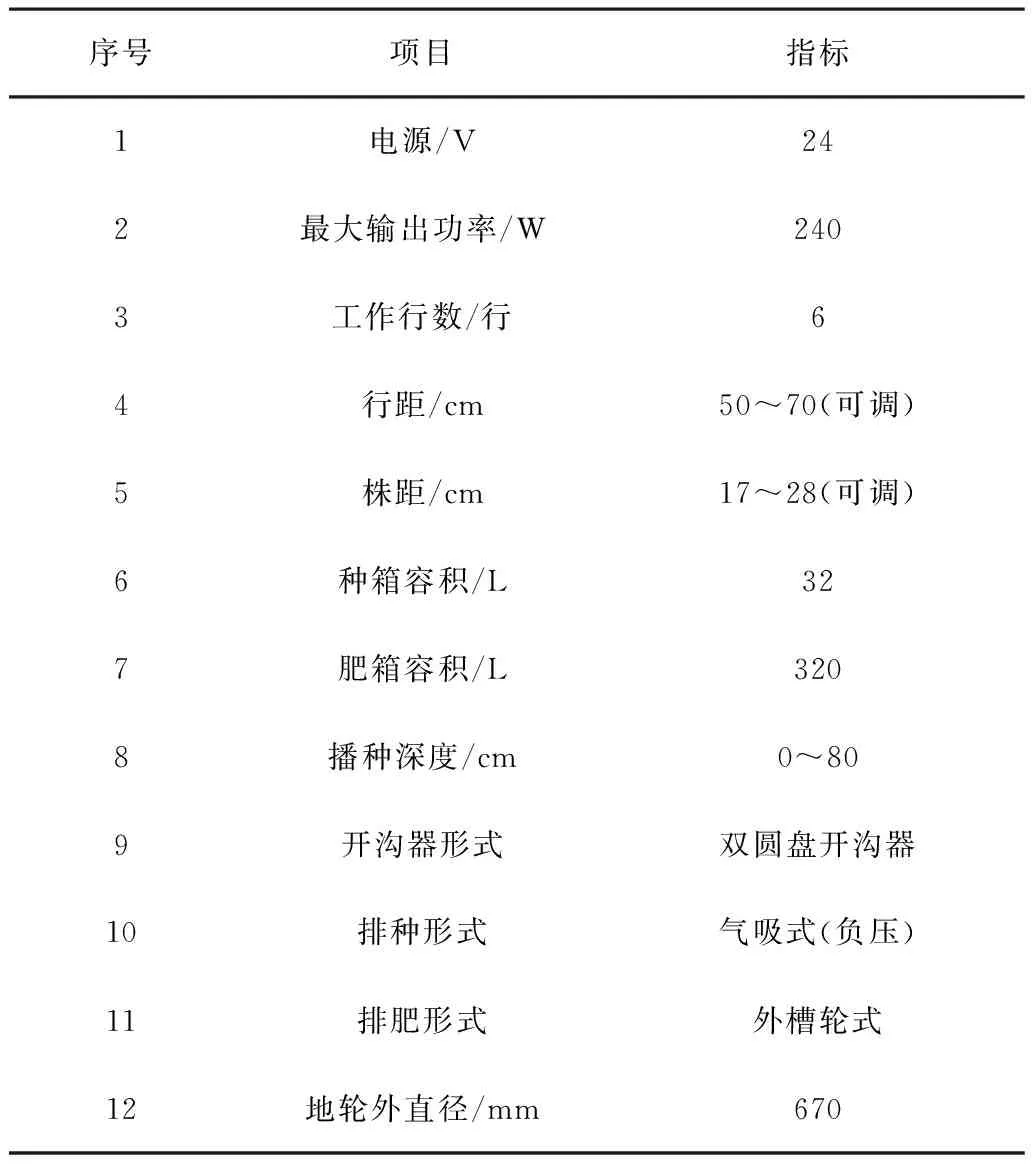
表1 主要性能指標(biāo)和工作參數(shù)Table 1 Main performance and operating parameters
2 基于電機(jī)直驅(qū)的排種方案設(shè)計(jì)
對(duì)于單個(gè)氣吸式排種器,由獨(dú)立的伺服電機(jī)驅(qū)動(dòng),伺服電機(jī)轉(zhuǎn)速與拖拉機(jī)行駛速度動(dòng)態(tài)匹配,同時(shí)根據(jù)畝播量,保證播種株距恒定。方案布置圖如圖2所示。

1.伺服電機(jī) 2.光電傳感器 3.電機(jī)驅(qū)動(dòng)器 4.排種盤(pán) 圖2 玉米播種機(jī)單體Fig.2 Units of corn planter
2.1 電機(jī)驅(qū)動(dòng)基本原理
該株距自適應(yīng)系統(tǒng),采用“北斗+地輪”雙通道互補(bǔ)測(cè)速系統(tǒng)測(cè)速,拖拉機(jī)速度信號(hào)通過(guò)可編程控制器(PLC)轉(zhuǎn)換為伺服電機(jī)的脈沖信號(hào),在伺服電機(jī)轉(zhuǎn)速與拖拉機(jī)行駛速度之間建立一定的關(guān)系模型,使伺服電機(jī)的轉(zhuǎn)速隨著拖拉機(jī)速度的變化而變化;伺服電機(jī)驅(qū)動(dòng)排種盤(pán),使排種盤(pán)轉(zhuǎn)速隨拖拉機(jī)行駛速度動(dòng)態(tài)變化,從而保證株距不隨拖拉機(jī)行駛速度的變化而變化,實(shí)現(xiàn)株距的動(dòng)態(tài)自適應(yīng)。
PLC在每行的起點(diǎn)與終點(diǎn)分別讀取經(jīng)緯度信號(hào),并將其存儲(chǔ)在響應(yīng)的寄存器中,進(jìn)行數(shù)據(jù)轉(zhuǎn)換并結(jié)合作業(yè)幅寬計(jì)算相應(yīng)的播種面積。安裝在排種盤(pán)上的光電傳感器,將光電信號(hào)轉(zhuǎn)換成電信號(hào)通過(guò)可編程控制器傳遞到觸控屏,在觸控屏上顯示相應(yīng)的信息與報(bào)警,實(shí)現(xiàn)智能漏播監(jiān)控報(bào)警。
2.2 速度信號(hào)的獲取
舊驅(qū)動(dòng)方式主要采用地輪驅(qū)動(dòng),在低速行駛下滑移率較小、可靠度高;在高速作業(yè)下滑移率較大,易產(chǎn)生漏播等現(xiàn)象。而通過(guò)導(dǎo)航測(cè)速可以避免由地輪滑移率較高造成的漏播等現(xiàn)象;因?qū)Ш骄人蓿诘退傩旭偟那闆r下,誤差略大。
綜合兩種形式的優(yōu)缺點(diǎn),設(shè)計(jì)了“北斗+地輪”雙通道互補(bǔ)測(cè)速系統(tǒng):在低速行駛時(shí)采用地輪測(cè)速,當(dāng)作業(yè)速度達(dá)到一定速度以上時(shí),切換到北斗測(cè)速。這樣既避免了地輪高速作業(yè)的滑移率較大的問(wèn)題,也改善了低速作業(yè)下精度不夠的問(wèn)題。方案如圖3所示。
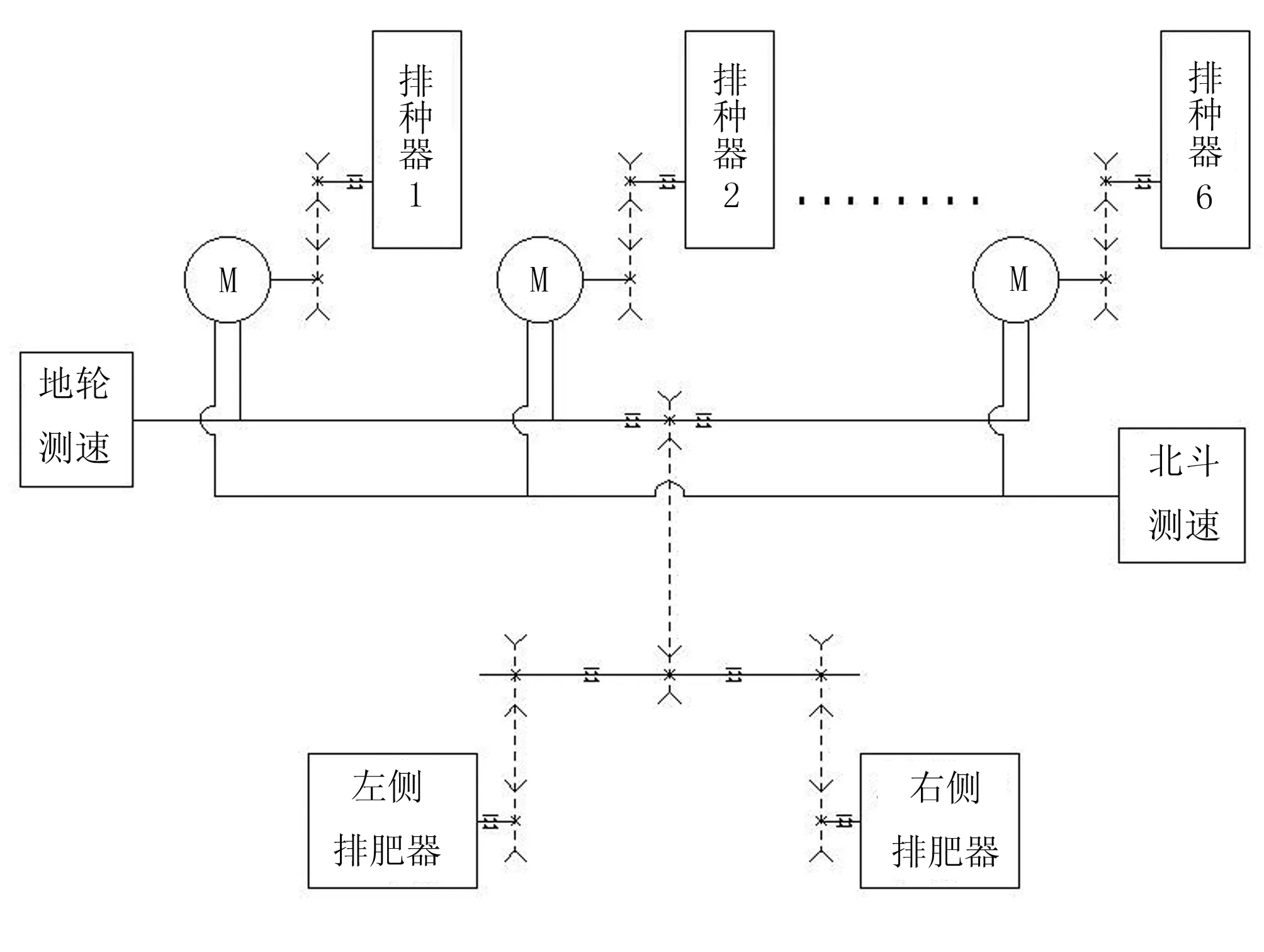
圖3 基于電機(jī)直驅(qū)的排種器驅(qū)動(dòng)方案Fig.3 The seed metering based on driver by servo motor
通過(guò)地輪讀取速度信息,在地輪的傳動(dòng)軸上裝有旋轉(zhuǎn)編碼器,作業(yè)時(shí)地輪著地帶動(dòng)傳動(dòng)軸旋轉(zhuǎn),旋轉(zhuǎn)編碼器讀取到傳動(dòng)軸的轉(zhuǎn)速傳到控制盒中的可編程控制器(PLC)中。當(dāng)通過(guò)導(dǎo)航系統(tǒng)讀取速度信息時(shí),先獲取報(bào)文信息。報(bào)文格式如下:
$GPGGA,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,M,<10>,M,<11>,<12>*xx
$GPGGA:起始引導(dǎo)符及語(yǔ)句格式說(shuō)明;
<1> UTC時(shí)間,格式為hhmmss.sss;
<2> 緯度,格式為ddmm.mmmm(第一位是零也將傳送);
<3> 緯度半球,N或S(北緯或南緯);
<4> 經(jīng)度,格式為dddmm.mmmm(第一位零也將傳送);
<5> 經(jīng)度半球,E或W(東經(jīng)或西經(jīng));
<6> GPS狀態(tài),0初始化,1單點(diǎn)定位,2碼差分,3無(wú)效PPS,4固定解,5浮點(diǎn)解,6正在估算,7人工輸入固定值,8模擬模式,9WAAS查分;
<7> 使用衛(wèi)星數(shù)量,從00到12(第一個(gè)零也將傳送);
<8> 水平精度因子,0.5到99.9;
<9> 天線離海平面的高度,-9999.9到9999.9米,M 指單位米;
<10> 大地水準(zhǔn)面高度,-9999.9到9999.9米M 指單位米;
<11> 差分GPS數(shù)據(jù)期限(RTCM SC-104),最后設(shè)立RTCM傳送的秒數(shù)量,如不是差分定位則為空;
<12> 差分參考基站標(biāo)號(hào),從0000到1023(首位0也將傳送)。地面速度信息。
(GPVTG)$GPVTG,<1>,T,<2>,M,<3>,N,<4>,K,<5>*hh
<1> 以真北為參考基準(zhǔn)的地面航向(000~359度,前面的0也將被傳輸);
<2> 以磁北為參考基準(zhǔn)的地面航向(000~359度,前面的0也將被傳輸);
<3> 地面速率(000.0~999.9節(jié),前面的0也將被傳輸);
<4> 地面速率(0000.0~1851.8公里/小時(shí),前面的0也將被傳輸);
<5> 模式指示(僅NMEA0183 3.00版本輸出,A=自主定位,D=差分,E=估算,N=數(shù)據(jù)無(wú)效可編程控制器將接受到的報(bào)文格式存儲(chǔ)到指定的寄存器中,再?gòu)奶囟ǖ募拇嫫髦凶x取數(shù)據(jù)。
2.3 株距建模
播種機(jī)是由電機(jī)帶動(dòng)播種盤(pán)轉(zhuǎn)動(dòng)的,株距跟行進(jìn)速度應(yīng)保持一定關(guān)系,以達(dá)到在速度變化時(shí)株距恒定不變。則
(1)
式中D—播種行距(cm);
L—每畝(667m2)寬為D的地塊長(zhǎng)度。
(2)
式中d—播種株距(cm);
N—每畝(667m2)地的播種株數(shù)。
(3)
式中v—拖拉機(jī)行進(jìn)速度(km/h);
n—伺服電機(jī)轉(zhuǎn)速。
由上式可知
(4)
經(jīng)過(guò)上述計(jì)算可得出在畝株數(shù)一定的情況下,行進(jìn)速度與電機(jī)轉(zhuǎn)速對(duì)應(yīng)關(guān)系,如表2所示。
控制器將轉(zhuǎn)速信號(hào)傳遞到播種單體電機(jī)的控制盒內(nèi),以達(dá)到播種轉(zhuǎn)速隨行進(jìn)速度變化而變化,從而達(dá)到播種株距恒定不變。
2.4 上位機(jī)與車載觸控
車載觸控在前車駕駛室內(nèi),通過(guò)RS485總線與控制盒相連。觸控屏上可以輸入播種量、行距與施肥量,從寄存器內(nèi)讀取株距和行進(jìn)速度等,再在觸控屏上顯示。觸控屏界面設(shè)計(jì)如圖4所示。
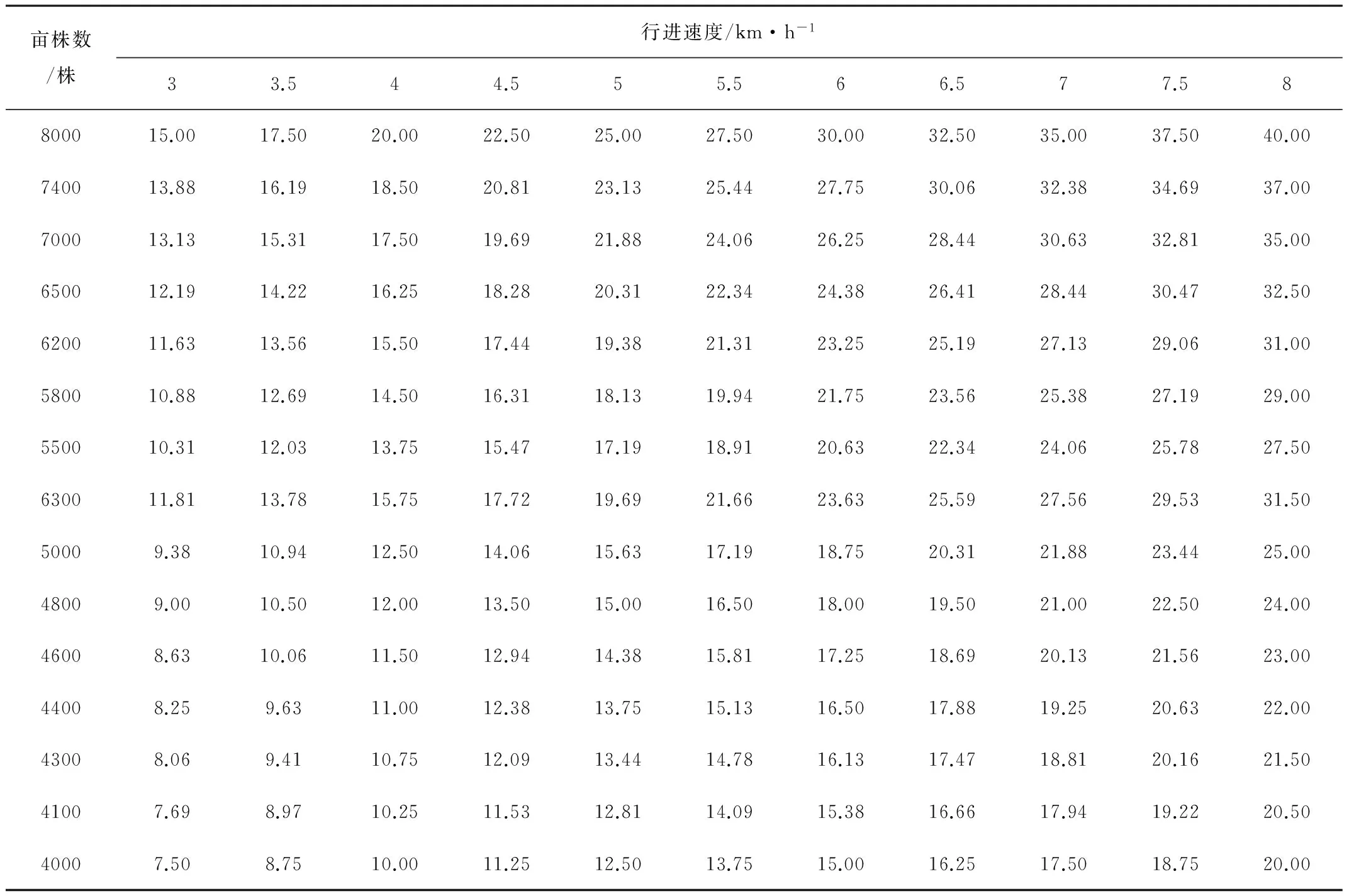
表2 不同行進(jìn)速度與播量條件下電機(jī)對(duì)應(yīng)轉(zhuǎn)速 Tab.2 Motor speed corresponding to different speed and sowing rate r/min

圖4 觸控屏界面Fig.4 Touch screen interface
3 田間試驗(yàn)
3.1 試驗(yàn)條件
間性能試驗(yàn)分別在淄博臨淄鳳凰鎮(zhèn)富群農(nóng)機(jī)合作社進(jìn)行,秸稈覆蓋量≥40%,秸稈切碎長(zhǎng)度合格率≥85%、殘茬覆蓋量為0.3~0.6kg/m2(秸稈含水率≤25%),配套動(dòng)力≥89kW。
3.2 試驗(yàn)結(jié)果
通過(guò)上文的設(shè)計(jì)方法得出的精密播種機(jī)相關(guān)參數(shù),按照所得參數(shù)對(duì)精密播種機(jī)進(jìn)行樣機(jī)制作,如圖5所示。

圖5 株距自適應(yīng)播種機(jī)樣機(jī)Fig.5 Adaptive spacing corn planter prototype
淄博市農(nóng)業(yè)機(jī)械科學(xué)研究院對(duì)該機(jī)的粒距合格指數(shù)、合格粒距變異系數(shù)、漏播率及偏離距離等主要性能指標(biāo)進(jìn)行了檢測(cè),均優(yōu)于行業(yè)標(biāo)準(zhǔn)指標(biāo)。試驗(yàn)檢測(cè)結(jié)果如表3所示。
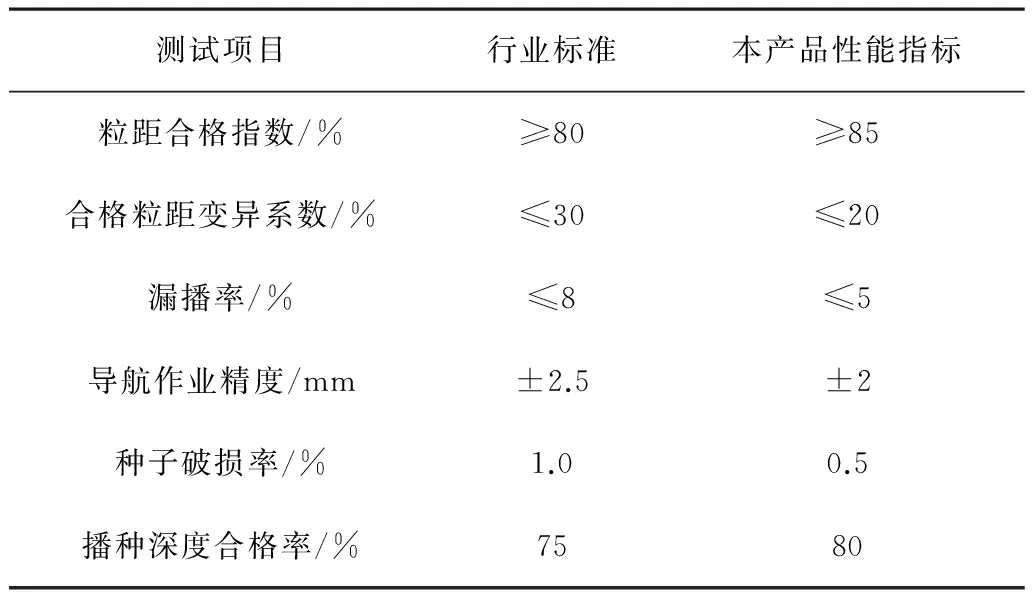
表3 試驗(yàn)檢測(cè)結(jié)果Table 3 Testing results of the corn planter
4 結(jié)論
試驗(yàn)證明:采用氣吸式精量玉米免耕播種機(jī),播種株距穩(wěn)定,行進(jìn)直線度高,產(chǎn)量可提高5%~10%,減少了作業(yè)量,大大提高了效率,解決了作業(yè)行進(jìn)直線度不高,株距不穩(wěn)定等問(wèn)題。其主要技術(shù)指標(biāo)達(dá)到國(guó)外同類產(chǎn)品先進(jìn)水平,具有廣闊的發(fā)展前景,推動(dòng)了我國(guó)電動(dòng)式氣吸精量玉米免耕播種機(jī)技術(shù)的發(fā)展。
[1] 張波屏.播種機(jī)械設(shè)計(jì)原理[M].北京:機(jī)械工業(yè)出版社,1982:288-291.
[2] 張德文,李林,王惠民.精密播種機(jī)械[M].北京:中國(guó)農(nóng)業(yè)出版社,1982:42-53.
[3] 馬成林,陳曉光,左春檉,等.播種機(jī)械土壤工作部件基本特性的研究[J].農(nóng)業(yè)工程學(xué)報(bào),1992,12(4):41-42.
[4] 高煥文,李問(wèn)盈,李洪文.中國(guó)特色保護(hù)性耕作技術(shù)[J].農(nóng)業(yè)工程學(xué)報(bào),2003,19(3):14.
[5] 朱光明,楊林,李洪文.2BQMF5型氣吸式施肥免耕播種機(jī)的設(shè)計(jì)與試驗(yàn)[J].農(nóng)機(jī)化研究,2008(7):84- 86.
[6] 尤曉東,張旭,劉忠澤,等.2BQM-2型免耕氣吸播種施肥機(jī)的研制與試驗(yàn)[J].農(nóng)機(jī)化研究, 2009,31(7):38-40.
[7] 李林.氣吸式排種器理論及試驗(yàn)的初步研究[J].農(nóng)業(yè)機(jī)械學(xué)報(bào),1979,10(3):56-63.
[8] GB/T 19392-2013車載衛(wèi)星導(dǎo)航設(shè)備通用規(guī)范[S].
[9] 陳志.農(nóng)業(yè)機(jī)械設(shè)計(jì)手冊(cè)[K].北京:中國(guó)農(nóng)業(yè)科學(xué)技術(shù)出版社,2007:303-314.
