黃燈期間首停車及末行車行駛參數(shù)分析
2018-03-30 00:44:50付川云劉海玥
交通運輸工程與信息學報 2018年1期
付川云,劉海玥
(1. 西南交通大學,交通運輸與物流學院,成都610031;2. 綜合交通運輸智能化國家地方聯(lián)合工程實驗室,成都610031)
0 引 言
黃燈啟亮時,直行車道上的首停車(第一輛選擇停止的車輛)和末行車(最后一輛選擇繼續(xù)通行的車輛)最有可能陷入兩難區(qū)。根據(jù)兩難區(qū)的定義,黃燈期間首停車及末行車行駛參數(shù)與兩難區(qū)邊界確定密切相關(guān)[1]。因此,探究黃燈期間首停車及末行車行駛參數(shù),對揭示兩難區(qū)分布及縮小或消除兩難區(qū)范圍具有重要的意義。
關(guān)于黃燈期間首停車及末行車行駛參數(shù),國外學者主要關(guān)注了感知反應時間,減速度,以及加速度。感知反應時間包括停車和行駛感知反應時間,且二者常被假設為相等[2]。眾多學者分析了停車感知反應時間(以下簡稱感知反應時間)的范圍、均值、百分位值等,并認為對數(shù)正態(tài)分布或貝塔分布能較好地擬合感知反應時間[3,4]。關(guān)于減速度,美國交通工程師協(xié)會推薦其取值為3.05 m/s2[5],而美國國家公路與運輸協(xié)會標準的推薦值是3.41 m/s2[6]。一些文獻也給出了減速度的百分位值[7],且其中85%位值均比美國交通工程師協(xié)會和美國國家公路與運輸協(xié)會標準的推薦值大。與前面兩個行駛參數(shù)不同的是,加速度常被假設為0,然而,這與實際情況不符。
盡管國內(nèi)學者對駕駛?cè)朔磻獣r間開展了一定的研究[8],但關(guān)于黃燈啟亮時駕駛?cè)烁兄磻獣r間的研究鮮見報道。對于減速度,國內(nèi)文獻大多直接采用美國交通工程師協(xié)會或美國國家公路與運輸協(xié)會標準的推薦值。同樣地,加速度也常取定值0。
綜上,國內(nèi)外關(guān)于黃燈期間首停車及末行車行駛參數(shù)的研究較少,且不系統(tǒng)。因此,本文以有無倒計時信號交叉口為調(diào)查地點,通過視頻觀測法采集黃燈期間首停車及末行車行駛參數(shù),并比較分析這些參數(shù)的描述統(tǒng)計值和擬合分布。
1 數(shù)據(jù)采集
1.1 首停車及末行車行駛參數(shù)定義
(1)首停車行駛參數(shù)
① 黃燈啟亮時至停車線距離,黃燈啟亮時首停車沿車道線平行方向上至停車線的距離。
② 黃燈啟亮時速度,以區(qū)間速度代替。
③ 感知反應時間,指黃燈啟亮與剎車燈啟亮之間的時間差。
④ 減速度,等于黃燈啟亮時速度與制動時間的比值。
(2)末行車行駛參數(shù)
除黃燈啟亮時至停車線距離和速度外,還包括:
① 進入時間,指黃燈啟亮與末行車越過停車線的時間差。
② 加速度,由其余三個參數(shù)確定,計算公式為:

式中:a為加速度(m/s2);XC指黃燈啟亮時至停車線距離(m);v是黃燈啟亮時速度(m/s);t為進入時間(s)。
1.2 視頻觀測
黃燈期間首停車及末行車行駛參數(shù)通過視頻觀測方法獲取。在哈爾濱市內(nèi)選擇了具備良好視距、過街行人流量小、相交道路限速為60 km/h及以上、進口道上游存在人行天橋等條件的4個有倒計時和2個無倒計時信號交叉口作為觀測點。對每個觀測點僅拍攝一次且均選在晴天的下午2~6點進行拍攝。最終,共獲得24 h的視頻數(shù)據(jù)。各觀測點的詳細信息及視頻觀測的具體情況詳見文獻[9]。
1.3 數(shù)據(jù)提取
憑借Pure Codec Player播放器和圖林白板軟件,提取黃燈期間首停車及末行車行駛參數(shù)。刪除黃燈啟亮前便制動及無法確認剎車燈是否啟亮的首停車的相關(guān)信息。此外,刪除闖紅燈末行車和少量常規(guī)公交車的相關(guān)信息。更多關(guān)于數(shù)據(jù)提取的細節(jié),詳見文獻[9]。最終,所提取的樣本數(shù),如表1所示。

表1 所提取的樣本數(shù)Tab.1 The sample size
2 首停車行駛參數(shù)分析
2.1 黃燈啟亮時至停車線距離
黃燈啟亮時首停車至停車線距離的描述統(tǒng)計值如表2所示。Levene’s檢驗結(jié)果表明,有無倒計時條件下黃燈啟亮時首停車至停車線距離的方差無顯著性差異,F(xiàn)(1,497)=0.105,P=0.746(顯著性水平為0.05,下同)。于是,由等方差t檢驗可知,這兩種條件下其均值無顯著性差異,t=1.960,p=0.051。
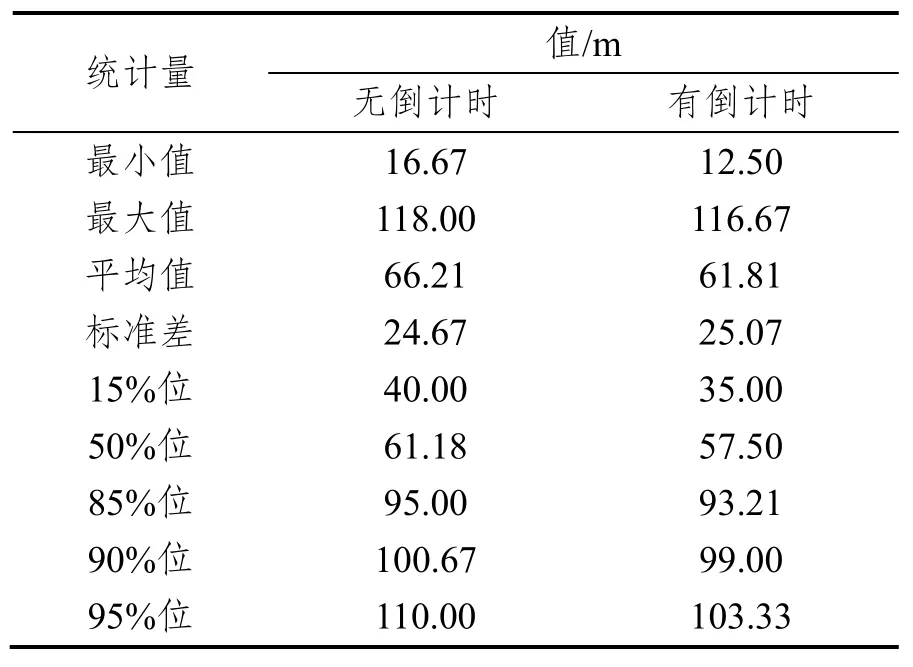
表2 黃燈啟亮時首停車至停車線距離的描述統(tǒng)計值Tab.2 Descriptive statistics of the distance to the stop line at the start of yellow time of the first-to-stop vehicles
根據(jù)樣本數(shù)據(jù)的特點,選擇約翰遜SB分布、廣義極值分布、韋布爾3P分布和對數(shù)皮爾森3分布進行擬合,得到參數(shù)估計結(jié)果見表3。Kolmogorov-Smirnov(K-S)檢驗結(jié)果表明,這四種分布均可用于擬合有無倒計時條件下黃燈啟亮時首停車至停車線距離,且最佳擬合分布均是約翰遜SB分布。

表3 擬合分布中參數(shù)估計結(jié)果Tab.3 Parameters of the fitted distributions (distance to the stop line)
2.2 黃燈啟亮時速度
黃燈啟亮時首停車速度的描述統(tǒng)計值,如表4所示。Levene’s檢驗結(jié)果表明,有無倒計時條件下黃燈啟亮時首停車速度的方差具有顯著差異性,F(xiàn)(1,497)=6.397,p=0.012。因此,由異方差t檢驗可知,無倒計時條件下黃燈啟亮時首停車的平均速度顯著大于倒計時條件下的平均速度,t=2.134,p=0.033。
類似地,選擇貝塔分布、伽馬分布、韋布爾3P分布以及正態(tài)分布擬合樣本數(shù)據(jù),得到參數(shù)估計結(jié)果見表5。K-S檢驗結(jié)果表明,這四種分布均可用于擬合有無倒計時條件下黃燈啟亮時首停車速度,且伽馬分布是無倒計時條件下的最佳分布,而貝塔分布是倒計時條件下的最佳分布。

表4 黃燈啟亮時首停車速度的描述統(tǒng)計值 Tab.4 Descriptive statistics of the speed at the start of yellow time of the first-to-stop vehicles
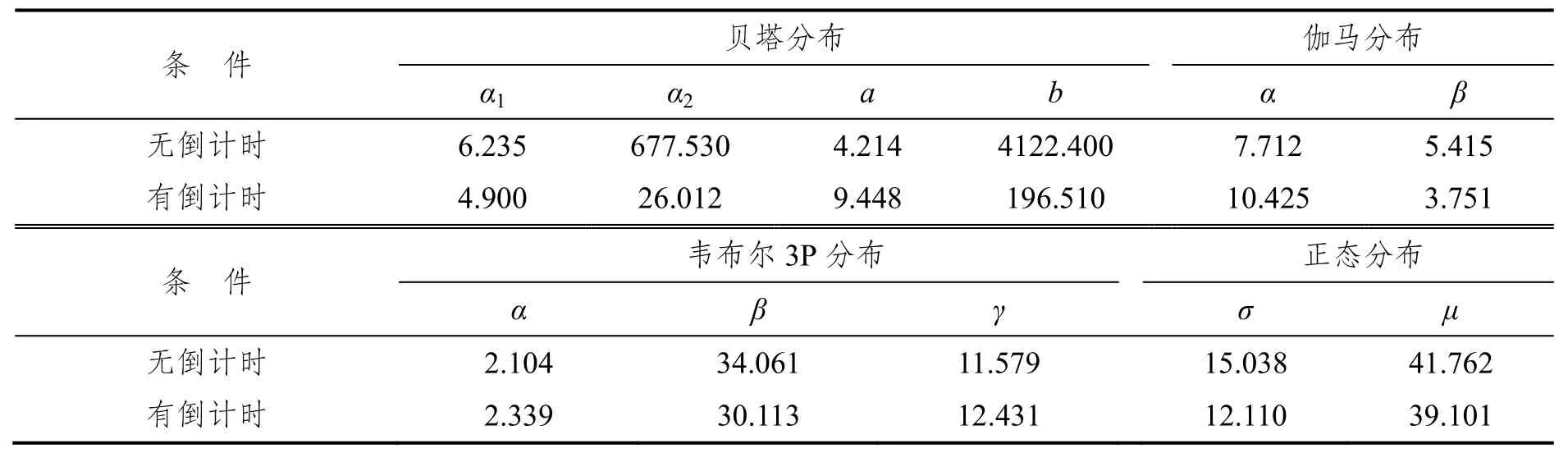
表5 擬合分布中參數(shù)估計結(jié)果Tab.5 Parameters of the fitted distributions (speed)
2.3 感知反應時間
感知反應時間的描述統(tǒng)計值,如表6所示。Levene’s檢驗結(jié)果顯示,有無倒計時條件下感知反應時間的方差有顯著性差異,F(xiàn)(1,497)=10.810,p=0.001。于是,由異方差t檢驗可知,這兩種條件下感知反應時間均值有顯著性差異,t=-2.988,p=0.003。
根據(jù)樣本數(shù)據(jù)的特點,選擇對數(shù)邏輯斯諦分布、對數(shù)正態(tài)分布、韋布爾分布和伽馬分布進行擬合,得到參數(shù)估計結(jié)果見表7。K-S檢驗結(jié)果表明,無倒計時條件下感知反應時間服從對數(shù)邏輯斯諦分布、對數(shù)正態(tài)分布或伽馬分布,且對數(shù)邏輯斯諦分布是最佳分布;倒計時條件下感知反應時間服從韋布爾分布和伽馬分布,且韋布爾分布是最佳分布。
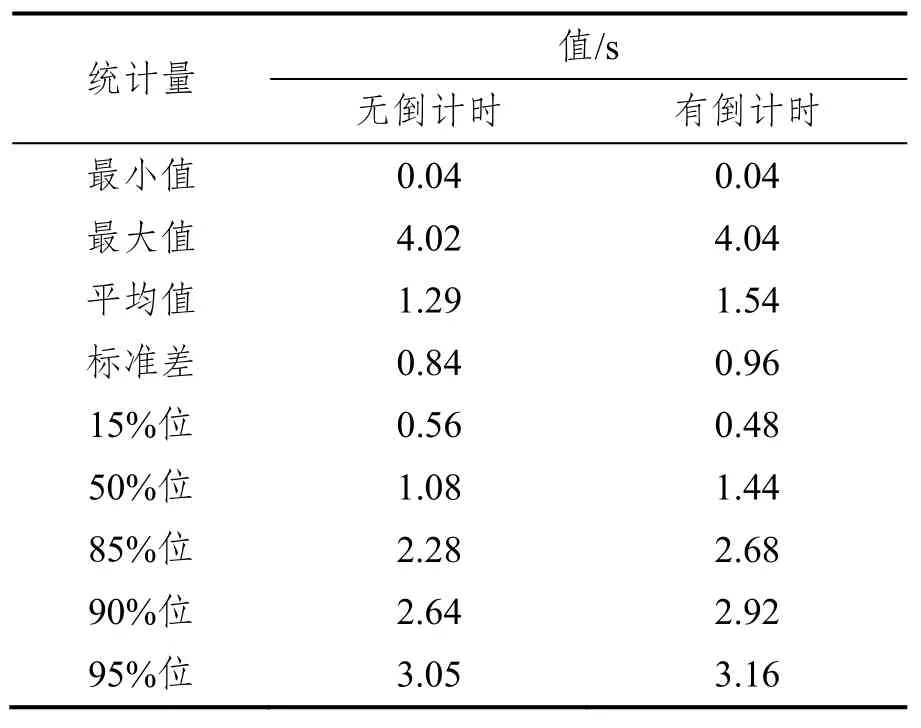
表6 感知反應時間的描述統(tǒng)計值Tab.6 Descriptive statistics of the perception-reaction time

表7 擬合分布中參數(shù)估計結(jié)果Tab.7 Parameters of the fitted distributions (perception-rection-time)
2.4 減速度
減速度的描述統(tǒng)計值,如表8所示。Levene’s檢驗結(jié)果顯示,有無倒計時條件下減速度的方差無顯著性差異,F(xiàn)(1,497)=2.036,p=0.154。因此,由等方差t檢驗可知,這兩種條件下減速度的均值無顯著性差異,t=1.732,p=0.084。
根據(jù)樣本數(shù)據(jù)的特點,選擇貝塔分布、對數(shù)邏輯斯諦3P分布、對數(shù)正態(tài)3P分布和伽馬分布進行擬合,得到參數(shù)估計結(jié)果見表9。K-S檢驗結(jié)果表明,這四種分布均可擬合有無倒計時條件下減速度,且對數(shù)邏輯斯諦3P分布是無倒計時條件下的最佳分布,而對數(shù)正態(tài)3P分布是倒計時條件下的最佳擬合分布。
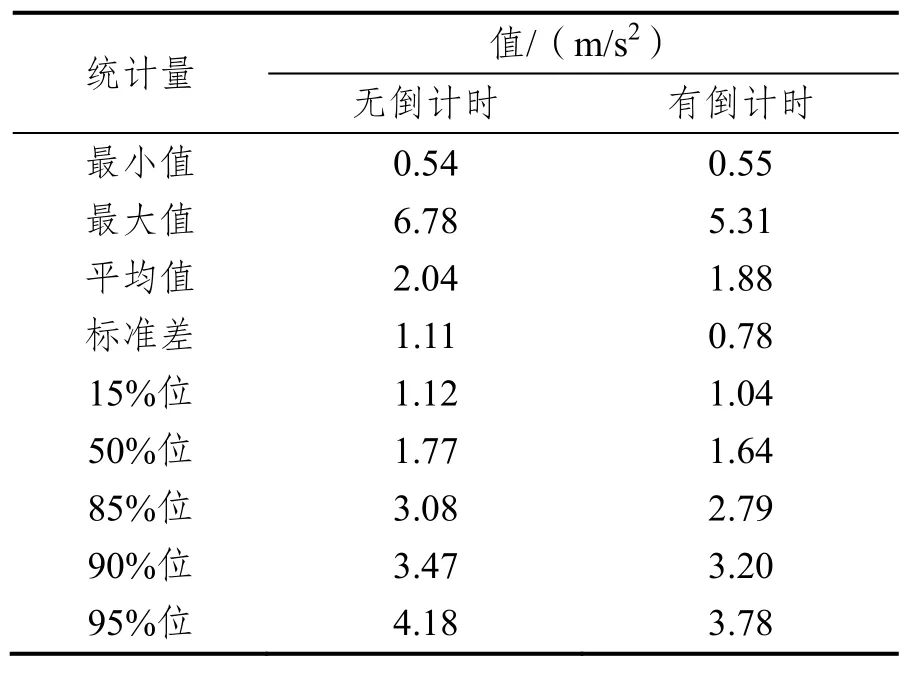
表8 減速度的描述統(tǒng)計值Tab.8 Descriptive statistics of the deceleration rate
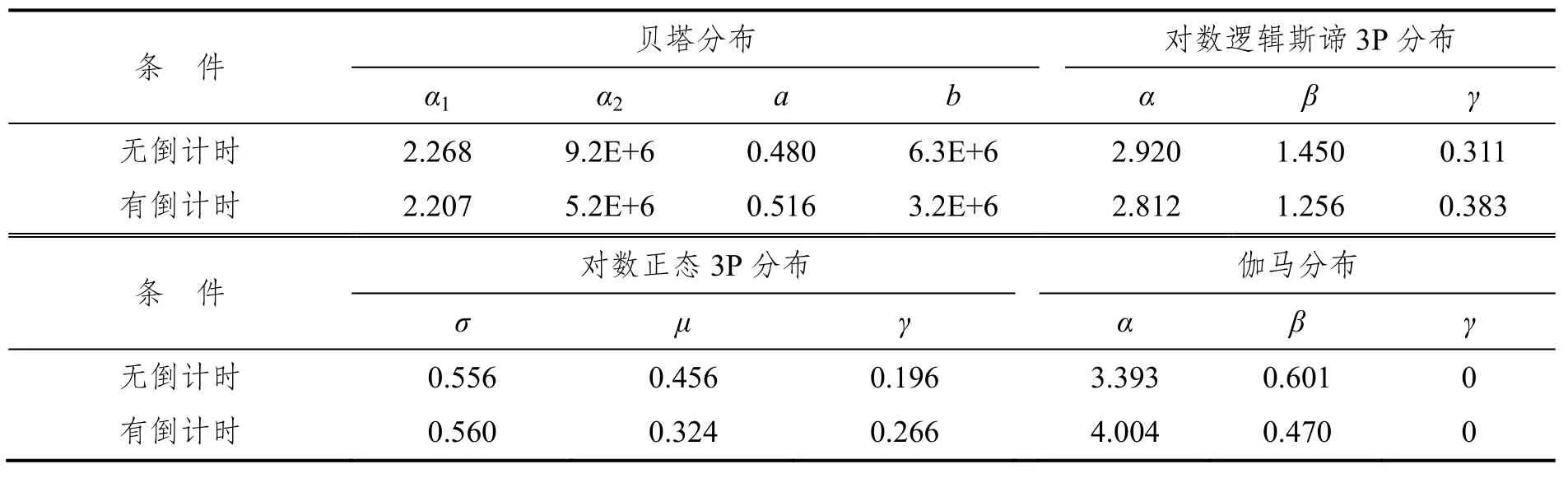
表9 擬合分布中參數(shù)估計結(jié)果Tab.9 Parameters of the fitted distributions (deceleration rate)
3 末行車行駛參數(shù)分析
3.1 黃燈啟亮時至停車線距離
黃燈啟亮時末行車至停車線距離的描述統(tǒng)計值,如表10所示。Levene’s檢驗結(jié)果顯示,有無倒計時條件下黃燈啟亮時末行車至停車線距離的方差無顯著性差異,F(xiàn)(1,552)=0.117,p=0.732。于是,由等方差t檢驗可知,這兩種條件下黃燈啟亮時末行車至停車線距離的均值具有顯著性差異,t=6.934,p<0.0001。
根據(jù)樣本數(shù)據(jù)的特點,選擇廣義極值分布、伽馬分布、對數(shù)皮爾森3分布和對數(shù)正態(tài)分布進行擬合,得到參數(shù)估計結(jié)果見表11。K-S檢驗結(jié)果表明,這四種分布均可擬合無倒計時條件下黃燈啟亮時末行車至停車線距離,且廣義極值分布是最佳分布,但無分布可用于擬合倒計時條件下黃燈啟亮時末行車至停車線距離。
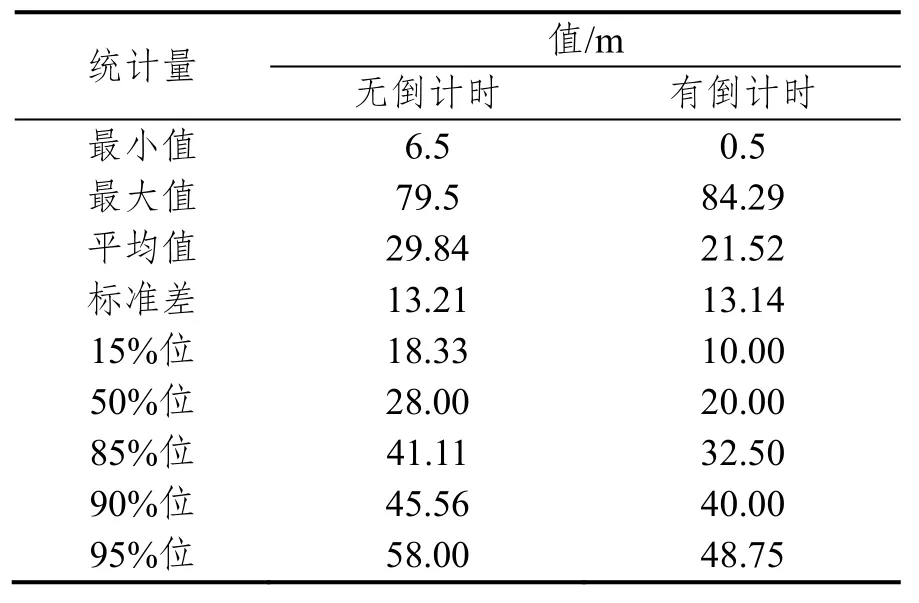
表10 黃燈啟亮時末行車至停車線距離的描述統(tǒng)計值Tab.10 Descriptive statistics of the distance to the stop line at the start of yellow time of the last-to-go vehicles

表11 擬合分布中參數(shù)估計結(jié)果Tab.11 Parameters of the fitted distributions (distance to the stop line)
3.2 黃燈啟亮時速度
黃燈啟亮時末行車速度的描述統(tǒng)計值,如表12所示。Levene’s檢驗結(jié)果顯示,有無倒計時條件下黃燈啟亮時末行車速度的方差無顯著性差異,F(xiàn)(1,552)=2.957,p=0.086。因此,由等方差t檢驗可知,這兩種條件下黃燈啟亮時末行車速度的均值無顯著性差異,t=-0.262,p=0.794。
根據(jù)樣本數(shù)據(jù)的特點,選擇約翰遜SB分布、韋布爾3P分布、貝塔分布和正態(tài)分布進行擬合,得到參數(shù)估計結(jié)果見表13。K-S檢驗結(jié)果表明,有無倒計時條件下黃燈啟亮時末行車速度服從約翰遜SB分布、貝塔分布或韋布爾3P分布,且最佳分布均為約翰遜SB分布。
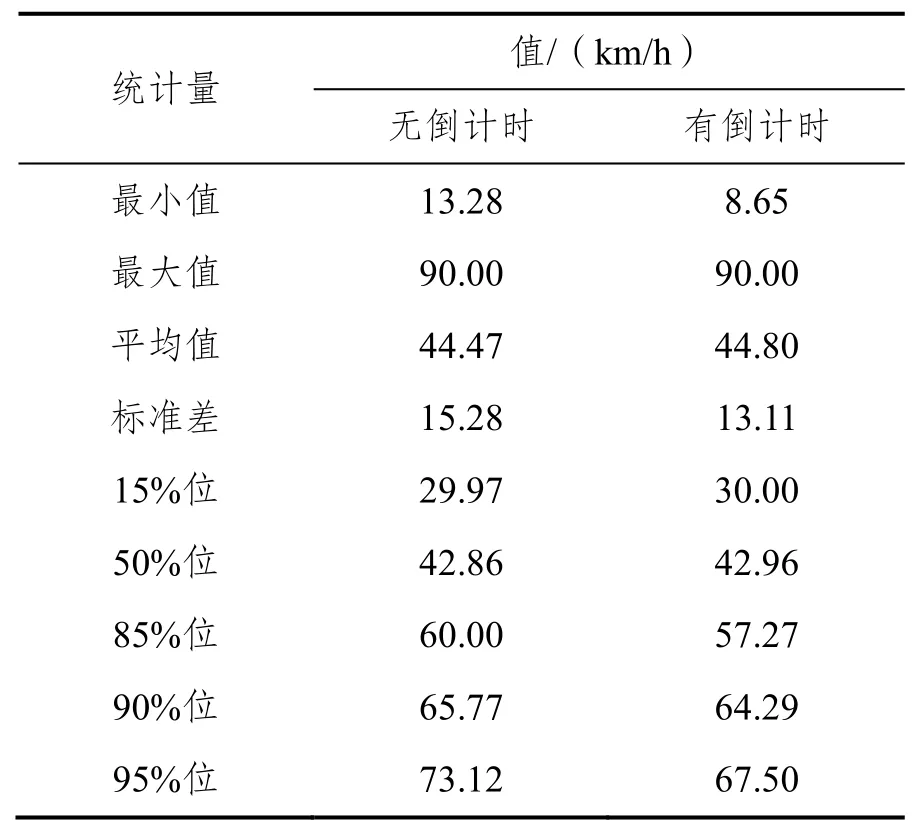
表12 黃燈啟亮時末行車速度的描述統(tǒng)計值Tab.12 Descriptive statistics of the speed at the start of yellow time of the last-to-go vehicles

表13 擬合分布中參數(shù)估計結(jié)果Tab.13 Parameters of the fitted distributions (speed)
3.3 進入時間
進入時間的描述統(tǒng)計值見表14。Levene’s檢驗結(jié)果表明,有無倒計時條件下進入時間的方差無顯著性差異,F(xiàn)(1,552)=0.287,p=0.592。于是,由等方差t檢驗可知,這兩種條件下進入時間的均值具有顯著性差異,t=8.952,p<0.0001。
根據(jù)樣本數(shù)據(jù)的特點,選擇約翰遜SB分布、對數(shù)皮爾森3分布、貝塔分布和韋布爾分布進行擬合,得到參數(shù)估計結(jié)果見表15。K-S檢驗結(jié)果表明,這四種分布均可擬合有無倒計時條件下進入時間,且韋布爾分布是無倒計時條件下的最佳分布,而約翰遜SB分布是倒計時條件下的最佳分布。
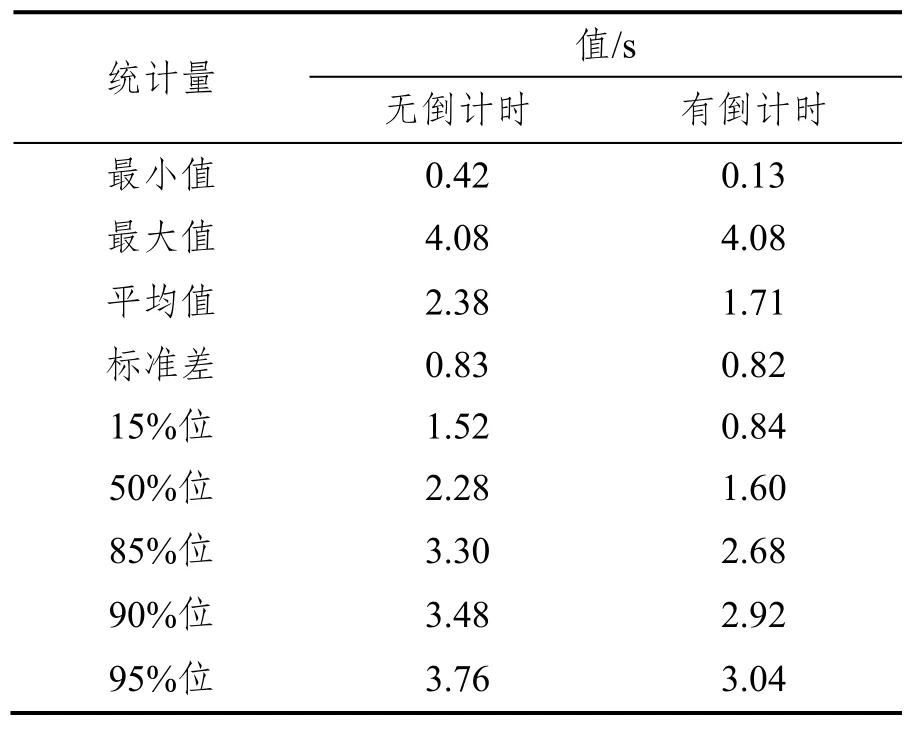
表14 進入時間的描述統(tǒng)計值Tab.14 Descriptive statistics of the entry time
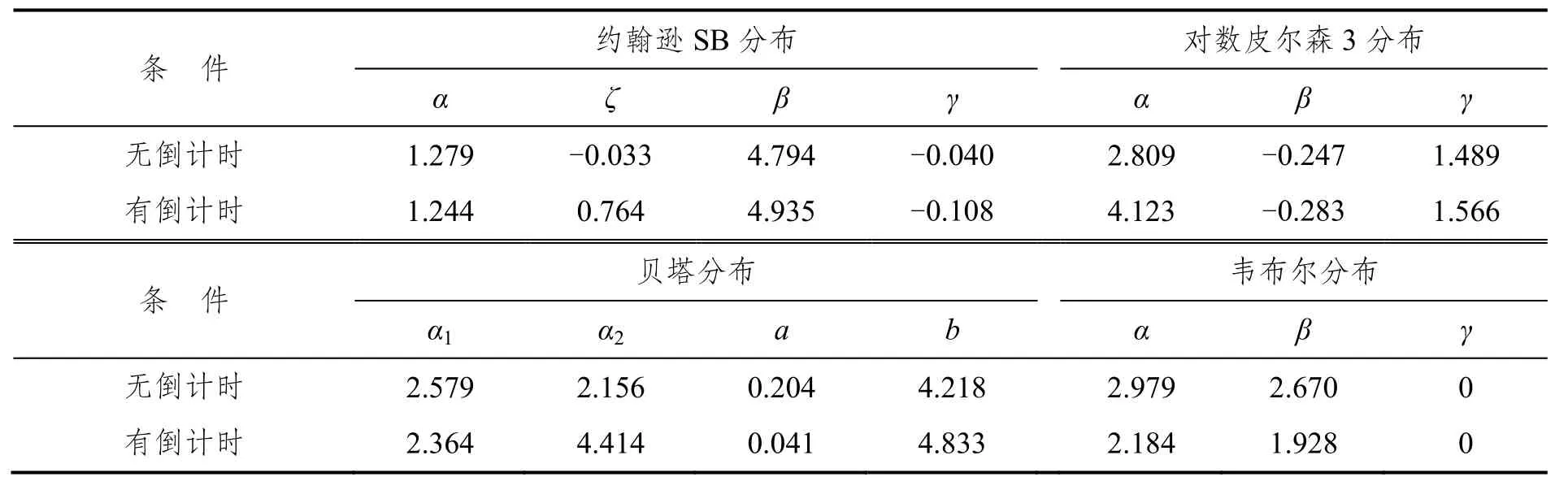
表15 擬合分布中參數(shù)估計結(jié)果Tab.15 Parameters of the fitted distributions (entry time)
3.4 加速度
減速度的描述統(tǒng)計值,如表16所示。Levene’s檢驗結(jié)果顯示,有無倒計時條件下加速度的方差具有顯著性差異,F(xiàn)(1,552)=16.383,p<0.0001。因此,由異方差t檢驗可知,這兩種條件下加速度的均值無顯著性差異,t=-1.186,p=0.236。
根據(jù)樣本數(shù)據(jù)的特點,選擇對數(shù)邏輯斯諦3P分布、對數(shù)正態(tài)3P分布、廣義極值分布和正態(tài)分布進行擬合,得到參數(shù)估計結(jié)果見表17。K-S檢驗結(jié)果表明,這四種分布均可擬合有無倒計時條件下加速度,且對數(shù)邏輯斯諦3P分布均是最佳分布。
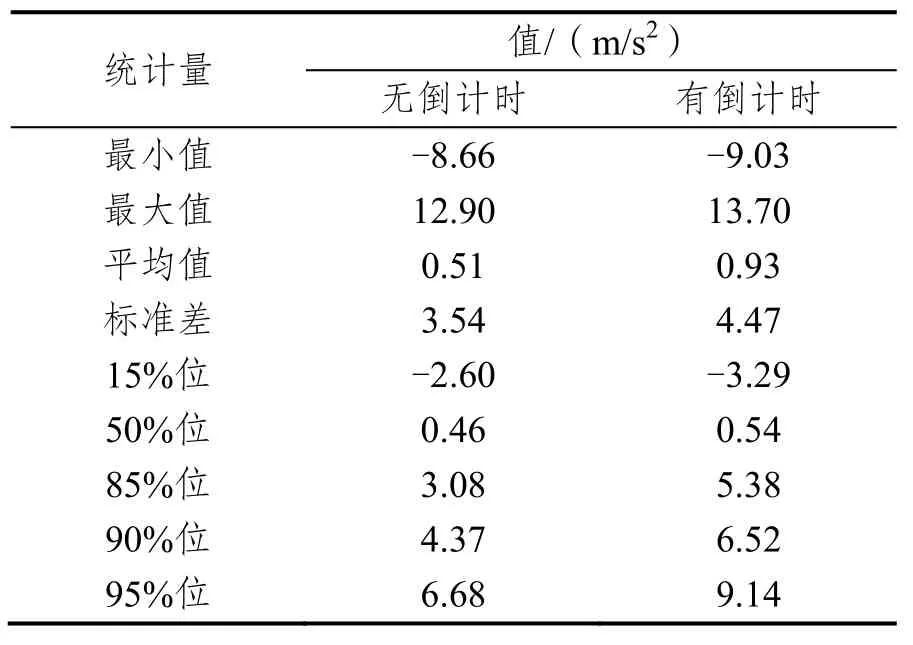
表16 加速度的描述統(tǒng)計值Tab.16 Descriptive statistics of the acceleration rate

表17 擬合分布中參數(shù)估計結(jié)果Tab.17 Parameters of the fitted distributions (acceleration rate)
4 結(jié) 論
本文利用視頻觀測方法采集了有無倒計時條件下黃燈期間首停車及末行車行駛參數(shù)(包括黃燈啟亮時至停車線距離、速度、感知反應時間、減速度、進入時間、加速度),對這些參數(shù)進行了描述統(tǒng)計分析,探討了倒計時對首停車及末行車行駛參數(shù)的影響,并分析了有無倒計時條件下上述參數(shù)的擬合分布。假設檢驗結(jié)果表明,倒計時對首停車黃燈啟亮時速度、感知反應時間及末行車黃燈啟亮時至停車線距離、進入時間有顯著影響。Kolmogorov-Smirnov檢驗結(jié)果顯示,有無倒計時條件下黃燈期間首停車及末行車行駛參數(shù)的最佳擬合分布各異。
本文研究成果可為有無倒計時條件下兩難區(qū)邊界確定及黃燈期間車輛行駛行為模擬奠定數(shù)據(jù)及理論基礎。然而,由于采集數(shù)據(jù)的精度有限且無倒計時條件下樣本數(shù)據(jù)偏少,故關(guān)于有無倒計時條件下黃燈期間首停車及末行車行駛參數(shù)的統(tǒng)計分析結(jié)果有待后續(xù)研究進一步完善。
[1] ZHANG Y, FU C, HU L. Yellow light dilemma zone researches:a review[J]. Journal of Traffic and Transportation Engineering(English Edition),2014,1(5):338-352.
[2] LI Z. Dynamic dilemma zone modeling and its protection[D].Cincinnati:University of Cincinnati,2011.
[3] SETTI J R,RAKHA H,EL-SHAWARBY I. Analysis of brake perception-reaction times on high-speed signalized intersection approaches[C]. Proceedings of 2006 IEEE Intelligent Transportation Systems Conference. Toronto:2006:689-694.
[4] GOH P K, WONG Y D. Driver perception response time during the signal change interval[J]. Applied Health Economics and Health Policy,2004,3(1):9-15.
[5] ITE. Traffic engineering handbook(the seventh edition)[M]. New Jersey:John Wiley & Sons,Inc.,2016.
[6] CLICK S M. Application of the ITE change and clearance interval formulas in North Carolina[J]. ITE Journal,2008,78(1):20-24.
[7] GATES T J, NOYCE D A, LARACUENTE L, et al.Analysis of driver behavior in dilemma zone at signalized intersections[J]. Transportation Research Record:Journal of the Transportation Research Board,2007,(2030):29-39.
[8] 柴琳果,蔡伯根,王化深,等. 車聯(lián)網(wǎng)中駕駛員反應時間實時估計方法[J]. 交通運輸系統(tǒng)工程與信息,2016,16(5):71-78.
[9] FU C, ZHANG Y, BIE Y, et al. Comparative analysis of driver’s brake perception-reaction time at signalized intersections with and without countdown timer using parametric duration models[J]. Accident Analysis and Prevention,2016,95:448-460.
