基于預估-反饋聯(lián)合處理的射頻噪聲干擾抑制算法
2018-04-03 06:56:20王國宏孫殿星白杰張翔宇
航空學報 2018年3期
王國宏,孫殿星,白杰,張翔宇
海軍航空大學, 信息融合研究所,煙臺 264001
現(xiàn)代雷達所面臨的電磁環(huán)境日益惡劣,針對雷達的電磁干擾技術(shù)迅速發(fā)展,噪聲壓制干擾作為一種常用的干擾類型,通過在時域和頻域?qū)δ繕嘶夭ㄐ盘栃纬扇采w達到其壓制干擾效果,其中射頻噪聲干擾相比于噪聲調(diào)制類干擾,其信號熵值最大且遮蓋性較好[1],從而增大了雷達對抗的難度,同時,線性調(diào)頻(Linear Frequency Modulation, LFM)信號具有較大的時寬帶寬積,能夠同時滿足作用距離和距離分辨率的要求,從而被廣泛應用于現(xiàn)代雷達系統(tǒng)中,所以適用于脈沖壓縮雷達的射頻噪聲干擾抑制技術(shù)對雷達的實戰(zhàn)和發(fā)展具有實際性的推動作用。
目前,國內(nèi)外學者在噪聲干擾抑制方面做了大量研究,文獻[2-3]通過不同算法實現(xiàn)目標回波信號與干擾信號的分離,從而達到干擾抑制的目的;文獻[4-6]分別提出了在干擾背景下直接進行目標檢測的算法;文獻[7-8] 利用LFM信號在分數(shù)階傅里葉變換(FRFT)域的處理增益,通過構(gòu)建濾波器實現(xiàn)干擾抑制。上述文獻基于信號層的處理,從不同角度入手,較好的實現(xiàn)了對噪聲壓制干擾的抑制,但是上述文獻均未建立合理的干擾抑制檢驗量,而算法參數(shù)又很難在沒有任何先驗信息的情況下達到最優(yōu),從而導致算法實時性以及在不同環(huán)境下的“應變能力”較差。
文獻[9]通過點跡關(guān)聯(lián)、數(shù)據(jù)壓縮以及數(shù)據(jù)跟蹤等技術(shù),解決了壓制干擾下雷達目標檢測概率低的問題;文獻[10] 通過建立量測模型及序貫濾波跟蹤,提升了組網(wǎng)雷達的目標檢測與跟蹤能力;文獻[11] 提出了點目標概率多假設跟蹤(DC-PPMHT)算法,降低了航跡丟失率;文獻[12] 依據(jù)干擾強度選擇基于粒子濾波的檢測前跟蹤(PF-TBD)或門限自適應的多假設跟蹤,提高了遠距離支援干擾下的目標跟蹤能力。上述文獻利用目標點跡和噪聲點跡的不同特征,通過數(shù)據(jù)層處理達到了干擾抑制的目的,但由于缺乏目標運動的先驗信息,為減小漏檢概率,會在較大的速度、加速度以及運動方向范圍內(nèi)對目標點跡進行檢測,從而導致當壓制干擾較強,噪聲點跡較密集時,過多的噪聲點跡滿足判決條件,造成真實目標的檢測以及跟蹤困難。
針對上述文獻所出現(xiàn)的問題,本文提出了一種基于預估-反饋聯(lián)合處理的射頻噪聲干擾抑制技術(shù),通過將信號層的信號估計算法和數(shù)據(jù)層的航跡檢測算法相結(jié)合,并對反饋調(diào)節(jié)環(huán)節(jié)進行構(gòu)建,有效實現(xiàn)了射頻噪聲干擾的抑制。
1 問題描述
假設在一段觀測時間內(nèi)目標的運動速度不變,在強射頻噪聲干擾環(huán)境下脈壓警戒雷達所接收到的回波信號x(t)為
JRF(t)+n(t)
(1)
式中:si(t)為第i個目標的回波信號;Ai、fi和φi(i=0,1,…,k-1)分別為第i個目標回波的幅度、載頻和相位;μ為LFM信號的調(diào)制斜率;n(t)為背景噪聲,包括接收機熱噪聲、電磁環(huán)境噪聲、雜波噪聲等,為高斯白噪聲;JRF(t)為射頻噪聲干擾,由帶限高斯白噪聲放大產(chǎn)生,其時域表達式為
JRF(t)=Uj(t)cos[ωjt+φ(t)]
(2)
式中:Uj(t)為包絡函數(shù),服從瑞利分布;φ(t)為相位函數(shù);ωj為中頻窄帶噪聲的中心頻率,且ωj遠大于JRF(t)的譜寬。
由式(1)可以看出,強射頻噪聲干擾環(huán)境下的干擾抑制技術(shù)需要解決以下幾個問題:
1)射頻噪聲干擾在時域和頻域?qū)FM信號形成全覆蓋,如何在強噪聲干擾環(huán)境下利用信號特性差異實現(xiàn)干擾能量消除,是信號層處理需要解決的難題。
2)信號層處理之后,噪聲點跡與目標點跡并存,如何對所有可能形成的航跡進行檢測以減小漏檢概率,是數(shù)據(jù)層處理需要解決的難題。
3)信號層的干擾消除效果依賴于算法參數(shù)的選擇,如何利用數(shù)據(jù)層對航跡的實時估計,對信號層算法參數(shù)進行調(diào)整,是聯(lián)合處理需要解決的難題。
2 射頻噪聲干擾抑制技術(shù)
綜合考慮以上問題,本文擬從以下3個方面進行強射頻噪聲干擾的抑制:①信號層窄帶濾波,以解決干擾消除問題;②數(shù)據(jù)層邏輯判決,以解決航跡生成問題;③反饋調(diào)節(jié),以解決參數(shù)調(diào)節(jié)問題。本文總體思路如圖1所示。
2.1 基于信號估計的窄帶濾波干擾消除
首先對回波信號進行盲源分離預處理,以解決目標回波之間的交叉干擾[13]問題,然后利用LFM信號在FRFT域不同階次的不同特性,通過對LFM信號能量聚集點的坐標估計,構(gòu)建窄帶濾波器進行信號層干擾消除。基于坐標估計的信號層窄帶濾波干擾消除原理如圖2所示。
圖中:B為LFM信號帶寬;T為LFM信號時長。在FRFT某一變換階次,如圖2中軸所示,LFM信號表示為復正弦信號,且正弦信號載頻與LFM信號的載頻存在確定關(guān)系,因此利用子空間正交方法[14]可以完成LFM信號的檢測和參數(shù)估計,而在FRFT域的正交變換階次,如圖2中軸所示,LFM信號表現(xiàn)為沖激函數(shù),此時能夠根據(jù)參數(shù)估計結(jié)果對LFM信號的能量聚集點坐標進行估計,并基此構(gòu)建窄帶濾波器,完成濾波處理。
2.1.1 Fast ICA算法盲源分離預處理
由式(1)可以看出,在實際干擾環(huán)境下,雷達所接收的信號是由不同目標回波和干擾信號組成的混合信號,由于不同目標回波信號之間相互獨立,且滿足非高斯分布的要求,所以本文首先采用獨立成分分析(ICA)算法對多分量LFM信號進行分離,同時考慮到基于最大負熵理論的Fast ICA算法收斂速度為3階,較ICA算法的線性收斂速度更快,算法實時性更強,所以本文最終采用Fast ICA算法對回波信號進行處理。
假設戰(zhàn)場環(huán)境中目標個數(shù)n不大于接收系統(tǒng)的通道數(shù)m,采用多通道寬帶接收體制對多分量LFM信號進行接收,復數(shù)信號矩陣形式表示為
X=AS
(3)
式中:X=[x1x2…xm]T為m個觀測復數(shù)信號矢量;S=[s1s2…sn]T為n個獨立復數(shù)信號矢量包括n-1路LFM信號和1路噪聲干擾信號;A=[ωij]為m×n維復數(shù)混合矩陣,并且A列滿秩。Fast ICA算法主要包括中心化、白化和獨立分量提取3個步驟,其處理流程如圖3所示。
(4)
(5)
最后提取獨立分量,采用峭度來衡量分離信號的非高斯性,由于目標回波信號滿足非高斯分布,所以如果存在矩陣B,使得Y=BHZ的各個分量的峭度值離零值最遠,則認為Y是對源信號S的估計。對于矩陣B的具體求解過程可參考文獻[15],本文在此不再贅述。
通過對回波信號進行Fast ICA預處理,使得不同分量目標回波信號相分離,既減小了強目標回波信號對弱目標回波信號檢測的影響,同時對信號信干比也有所改善。
2.1.2 LFM信號檢測與參數(shù)估計
在強噪聲干擾環(huán)境下,目標回波(LFM)信號在FRFT域的能量聚集點被干擾信號所淹沒,從而導致傳統(tǒng)的基于峰值搜索的聚集點坐標估計算法不再適用,但是濾波器始末位置的確定需要以LFM信號的能量聚集點坐標為參考,為此,本文利用子空間正交方法更優(yōu)的抗干擾能力,首先進行LFM信號的檢測和參數(shù)估計[16-17],然后再根據(jù)參數(shù)估計結(jié)果進行聚集點坐標的估計。
經(jīng)過Fast ICA預處理后,除噪聲分量之外各分量信號統(tǒng)一表示為
r(t)=s(t)+N(t)=exp{-j[(ω0+ωd)t+
μt2/2+φ]}+N(t)
(6)
式中:ω0為發(fā)射信號載頻;ωd為目標多普勒頻移;N(t)為噪聲干擾信號,滿足高斯分布。
當FRFT變換角度α1滿足α1=-arctanμ時,LFM信號的FRFT變換為[18]
Aexp(-juωcosα1)
(7)
式中:w為LFM信號的載頻;
exp[-j(ω2sinα1cosα1-φ)/2]。
由式(7)可以看出Sp(u)為一個嚴格的復正弦信號,定義此時的變換階次為LFM信號的平行變換階次。由于FRFT是線性變換,式(6)的FRFT變換為
Rp(u)=A′exp(-jωnu)+Np(u)
(8)
式中:ωn=(ω0+ωd)cosα1為正弦信號角頻率;A′為復值常量;Np(u)=FRFTp[N(t)],滿足高斯分布。
對式(8)進行抽樣,并用矩陣形式表示:
R(k)=A′exp(jkωn)γ+N(k)
(9)
式中:γ=[1ejωn…ejmωn]T;N(k)=[Np(k)Np(k+1)…Np(k+m)]T。
向量R(k)的協(xié)方差矩陣為
(10)
由于矩陣rank(γγH)=1,根據(jù)文獻[19]的結(jié)論容易證明:
(11)

由于多普勒頻移的存在,當分量信號中存在目標回波信號時,信號頻率滿足:
(12)
式中:wdmax為多普勒頻移最大值。
通過子空間正交方法最終得到LFM信號的載頻為
(13)
以上完成了LFM信號的檢測和估計,當有LFM信號存在時,根據(jù)以上所得到的載頻估計,可以對LFM信號在FRFT域的能量聚集點坐標進行估計,進而構(gòu)建窄帶濾波器,完成窄帶濾波過程。
2.1.3 LFM信號窄帶濾波
由于LFM信號的線性時頻特性使得LFM信號在FRFT域具備能量高度聚集的特征,而射頻噪聲干擾以及過程噪聲則不具備此特征,據(jù)此建立窄帶濾波器,使得LFM信號的能量包含在濾波器寬度范圍之內(nèi),而干擾以及噪聲的能量在濾波器寬度范圍之外,以此在完整保留LFM信號能量的前提下濾除大部分干擾和噪聲的能量[20]。
當變換角度α2與LFM信號的調(diào)頻率正交時,即α2=arctan(-1/2πμ),LFM信號的FRFT變換可表示為
|Sp(u)|=|A(t)Aα2σ(ω-ucosα2)|
(14)
由式(14)可以看出,當變換角度α2與LFM信號的調(diào)頻率正交時,LFM信號在u域表現(xiàn)為沖激函數(shù),具有明顯的能量聚集效果,并稱此時的變換階次為FRFT域LFM信號的正交變換階次。根據(jù)LFM信號的能量聚集特性構(gòu)建窄帶濾波器,使濾波器輸出在完整保留LFM信號能量的同時,濾除大部分噪聲干擾能量。
為了對量綱進行歸一化處理,引入尺度因子S=T/fs,定義新的尺度化坐標為
(15)
式中:T為觀測時間;fs為采樣頻率。新的坐標實現(xiàn)了無量綱化。
根據(jù)式(13),LFM信號在(p,u)二維平面上的能量聚集點坐標(p0,u0)估計為
(16)
L=2ρsin(p0π/2)S/(2πcosα1)+2/B
(17)
式中:ρ為目標多普勒頻率的估計誤差標準差。由式(17)可以看出,載頻的估計精度直接決定著濾波器寬度L的取值。
2.2 基于邏輯判決的數(shù)據(jù)層航跡檢測
在恒虛警檢測形成點跡之后,利用目標的運動特性在數(shù)據(jù)層對點跡進行處理:由于受機動性能的影響,目標點跡滿足一定的分布規(guī)律,而噪聲點跡則呈現(xiàn)出無序性的特點,運用M/N邏輯法對所有可能生成的航跡進行檢測,并根據(jù)信號層對目標運動狀態(tài)的估計,利用徑向速度方向判決算法,對不滿足要求的噪聲航跡進行剔除。
2.2.1 基于M/N邏輯法的航跡檢測
M/N邏輯法是以多重假設的方式通過預測和相關(guān)波門來確認可能存在的航跡,當N個掃描周期中有M個觀測點落入相關(guān)波門中時判斷航跡起始成功。

(18)
式中:c為光速。
量測協(xié)方差矩陣R為[22]
(19)
式中:
(20)
運用M/N邏輯法對目標進行檢測。其具體工作方式如圖4所示。
1)在xoy坐標系中,以暫時航跡的第一個點p1[x(1) y(1)]為圓心,以vmaxt、vmint為半徑構(gòu)建圓環(huán)形關(guān)聯(lián)區(qū)域。如果在下一個掃描周期雷達在此區(qū)域內(nèi)觀測到新的點跡,則暫時航跡形成第2個點p2[x(2) y(2)], 否則刪除該暫時航跡。vmax、vmin分別
為目標運動的最大速度和最小速度,t為雷達的掃描周期。
(21)
式中:
(22)
這里D3是服從自由度為m的χ2分布的隨機變量。由給定的門限概率查表可得門限γ,若第3次掃描量測所得的最小D3min值小于γ,則對該D3min值所對應的量測點p3[x(3) y(3)]給予互聯(lián)。此后重復步驟2),從而完成目標檢測。
通過M/N邏輯法可以實現(xiàn)對目標的檢測,但是由于噪聲點跡較密集的原因,可能存在檢測到的航跡為噪聲航跡的情況,所以需要對所有檢測到的航跡進行進一步的判決。
2.2.2 基于徑向速度方向判決的噪聲航跡剔除
通過信號層處理可以對目標的多普勒頻率進行估計,而在M/N邏輯法中并沒有對目標的徑向速度加以約束,所以可以將一部分徑向速度不滿足多普勒頻率估計的航跡進行剔除,實現(xiàn)目標航跡的預估檢測。
設k1、k2時刻的點跡坐標分別為(x1,y1)和(x2,y2),則數(shù)據(jù)層對k2時刻目標的多普勒頻率估計為
(23)
式中:sign(·)為取符號函數(shù);λ為雷達工作波長。
由式(13)可以得到信號層對目標當前時刻的多普勒頻率估計為
(24)
由于信號層對目標徑向速度的估計精度較低,所以在此只根據(jù)所估計的多普勒頻率方向進行判決。對每個時刻的航跡點進行如下判決:
對于某一條航跡而言,當速度估計矛盾的時刻數(shù)大于d時,判定航跡為噪聲航跡,并予以剔除。
通過徑向速度方向判決,一部分不滿足判決要求的航跡被剔除,但同時需要注意的是,通過徑向速度方向判決的方法并不能從根源上解決噪聲航跡的產(chǎn)生問題。噪聲航跡的產(chǎn)生來源于噪聲點跡,只有通過調(diào)整濾波器的濾波中心以及帶寬,才能減少噪聲點跡的數(shù)量,從而降低噪聲航跡產(chǎn)生的概率,所以,接下來對窄帶濾波器的反饋調(diào)節(jié)環(huán)節(jié)進行構(gòu)建。
2.3 基于反饋調(diào)節(jié)的聯(lián)合處理
2.3.1 反饋調(diào)節(jié)的原因
由式(17)的分析可知,目標多普勒頻率的估計精度直接影響著濾波器寬度的取值,進而影響到濾波效果的好壞,但是受采樣頻率等因素的影響,信號層對目標多普勒頻率的估計精度較低,從而導致濾波效果較差,增大了數(shù)據(jù)層噪聲航跡產(chǎn)生的可能性。
但同時,隨著觀測時間的延長,數(shù)據(jù)層能夠得到較為準確的航跡徑向速度估計,并且在一定時長后,能夠?qū)⒐烙嬚`差保持在較低的水平。因此,可以利用數(shù)據(jù)層對航跡徑向速度估計的反饋對窄帶濾波器的參數(shù)進行實時調(diào)整,從而使濾波效果更好,從根本上解決噪聲航跡的產(chǎn)生問題。
2.3.2 基于數(shù)據(jù)層反饋信息的濾波器調(diào)節(jié)
設k時刻對目標的速度預測矢量V為
(25)
(26)
則V在τ方向上的投影為
(27)
投影的方差為
(28)


第k時刻濾波器中心坐標修正為
(29)
根據(jù)正態(tài)分布的“3σ”原則,將濾波器寬度修正為
(30)
通過式(29)和式(30)實現(xiàn)了利用數(shù)據(jù)層的反饋信息對濾波器參數(shù)進行實時調(diào)整。對于目標航跡而言,通過反饋可以使濾波器達到更好的濾波效果,從而減少噪聲點跡對目標航跡的干擾;而對于噪聲航跡而言,噪聲點跡的減少會直接造成其航跡中斷。
2.4 總體思路流程圖
本文的射頻噪聲干擾抑制技術(shù)流程圖如圖5所示。
3 仿真實驗
為了驗證預估-反饋聯(lián)合處理算法的有效性,本文從信號層算法、數(shù)據(jù)層算法以及反饋調(diào)節(jié)算法3部分對射頻噪聲干擾的抑制問題進行仿真實驗,并與現(xiàn)有算法進行比較。
3.1 仿真條件設置
設雷達發(fā)射的LFM信號脈寬為50 μs,帶寬為5 MHz,載頻為5 GHz,中頻為1 MHz,中頻采樣頻率為15 MHz;雷達掃描周期為5 s,測距和測角誤差分別為100 m和0.2°。射頻噪聲干擾信號的帶寬為20 MHz,能夠在頻帶上覆蓋目標回波信號,目標參數(shù)信息如表1所示。
在雷達回波信號信干比為-25 dB條件下進行仿真實驗。
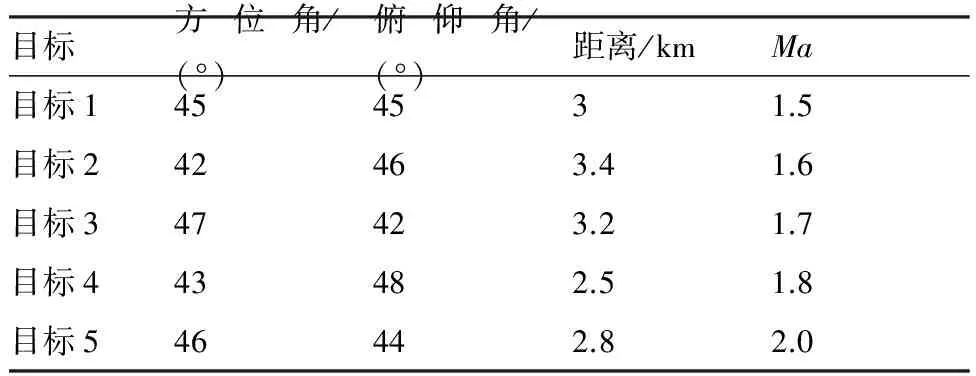
表1 目標參數(shù)Table 1 Target parameters
3.2 仿真結(jié)果與分析
3.2.1 信號層處理仿真驗證
1)首先為驗證本文信號層處理算法的有效性,與現(xiàn)有的基于峰值搜索的FRFT域濾波算法進行比較分析,其仿真結(jié)果如圖6和圖7所示。
圖6為信干比為-25 dB條件下,LFM信號在FRFT域正交階次的譜分布情況。由圖6可以看出,信干比為-25 dB時,LFM信號在FRFT域的能量聚集點被完全淹沒在噪聲干擾中,無法通過峰值搜索的方法得到能量聚集點坐標。
圖7為信干比為-25 dB條件下,通過子空間正交法得到的信號偽譜分布,其中,類似脈沖的尖峰代表復正弦信號所對應的角頻率。由圖7可以看出,信干比為-25 dB時,復正弦信號的角頻率能夠較準確的被估計出來,進而根據(jù)式(14)得到能量聚集點坐標。
表2所示為在不同信干比條件下,本文算法與峰值搜索算法的坐標估計均方根誤差對比。
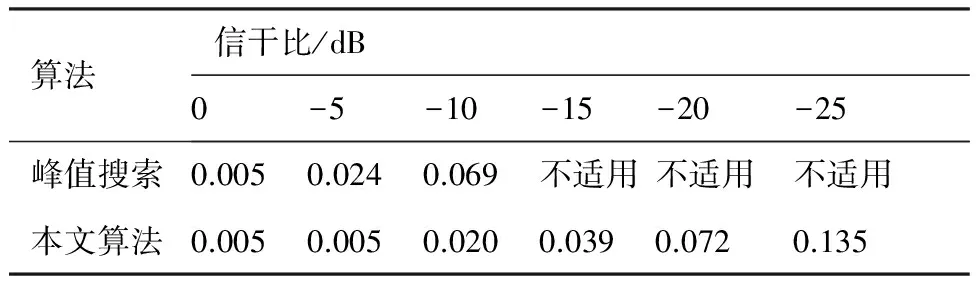
表2 與傳統(tǒng)算法均方根誤差(RMSE)對比
由表2數(shù)據(jù)可以看出,本文的坐標估計算法在估計精度以及穩(wěn)定性方面均優(yōu)于傳統(tǒng)的峰值搜索算法。
通過以上仿真實驗可以看出,相比于峰值搜索算法,本文所提算法抗噪聲干擾能力更強,能夠在信干比更低時實現(xiàn)LFM信號的檢測和參數(shù)估計。
2)為進一步驗證本文所提算法的有效性,對窄帶濾波算法進行仿真驗證,并給出了濾波前后的對比如圖8和圖9所示。圖8(a)和圖8(b)分別為窄帶濾波前后的脈沖壓縮結(jié)果,其中標注點表示目標所在位置。圖9(a)和圖9(b)分別為窄帶濾波前后連續(xù)5個掃描周期所得到的點跡情況。
通過圖8(a)和圖8(b)的對比可以看出,本文算法在較好保留目標回波信息前提下濾除了大部分干擾信號;通過圖9(a)和圖9(b)的對比可以看出,窄帶濾波之后所生成的點跡數(shù)量明顯減少,從而有利于數(shù)據(jù)層對目標的檢測。
結(jié)合本文算法,定義干擾抑制比為窄帶濾波前后信干比的差值,則干擾抑制比隨輸入信號信干比的變化情況如圖10所示。
圖10中橫坐標表示回波信號信干比,縱坐標表示干擾抑制比,隨著信干比的增大,干擾抑制比的增大趨勢逐漸減緩,并最終在信干比為35 dB時出現(xiàn)下降,其原因在于:回波信號信干比增大,使得LFM信號的載頻估計誤差增大,根據(jù)式(17),濾波器的寬度逐漸增大,最終導致窄帶濾波的干擾濾除效果下降。
3.2.2 數(shù)據(jù)層處理仿真驗證
為驗證本文數(shù)據(jù)層處理算法的有效性,對目標檢測算法進行仿真驗證。應用M/N邏輯法對窄帶濾波之后連續(xù)5個掃描周期的點跡進行目標檢測,仿真結(jié)果如圖11所示。
圖11為對連續(xù)5個掃描周期的點跡進行目標檢測所形成的航跡情況。由圖11可以看出,M/N邏輯法能夠?qū)δ繕诉M行檢測,但同時,由于噪聲點跡較密集分布在目標周圍,所以一部分由噪聲點跡形成的噪聲航跡也被誤檢出來。
進一步對徑向速度方向判決算法進行仿真驗證,其仿真結(jié)果如圖12所示。圖12為根據(jù)徑向速度判決對圖10中的噪聲航跡進行剔除后的結(jié)果。由圖12可以看出,徑向速度判決能夠?qū)σ徊糠謴较蛩俣炔粷M足判決條件的噪聲航跡進行剔除,效果較為明顯。
徑向速度判決前后,噪聲航跡的平均生成數(shù)量如表3所示。由表3可以看出,經(jīng)過徑向速度方向判決,噪聲航跡的生成數(shù)量在很大程度上有所減少。同時仍有部分噪聲航跡被保留下來,所以需要進一步通過數(shù)據(jù)層的反饋調(diào)節(jié)對噪聲航跡進行剔除。
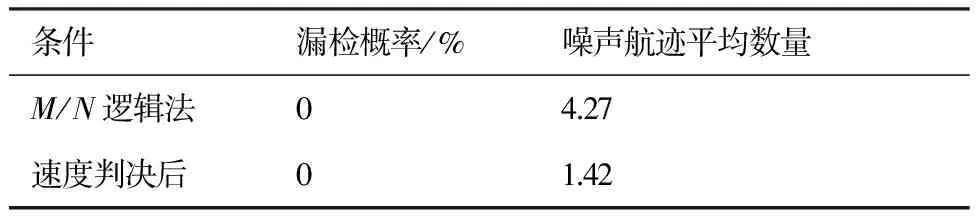
表3 噪聲航跡數(shù)量對比Table 3 Comparison of noise track numbers
3.2.3 反饋調(diào)節(jié)仿真驗證
為驗證反饋調(diào)節(jié)的有效性,對濾波器在不同時刻的參數(shù)進行記錄,其變化情況如表4所示。
表4為目標5的濾波中心以及濾波器帶寬的變化情況,其中,LFM信號的能量聚集點坐標為1.736 8。由表4可以看出,加入反饋調(diào)節(jié)之后,濾波器的中心更加接近于能量聚集點坐標,并最終保持在很小的誤差范圍內(nèi),同時濾波器帶寬也逐漸變窄,從而對噪聲起到了較好的濾除效果。
為進一步驗證反饋調(diào)節(jié)的有效性,對加入反饋調(diào)節(jié)之后數(shù)據(jù)層的目標檢測情況進行仿真驗證,其目標檢測效果如圖13所示。
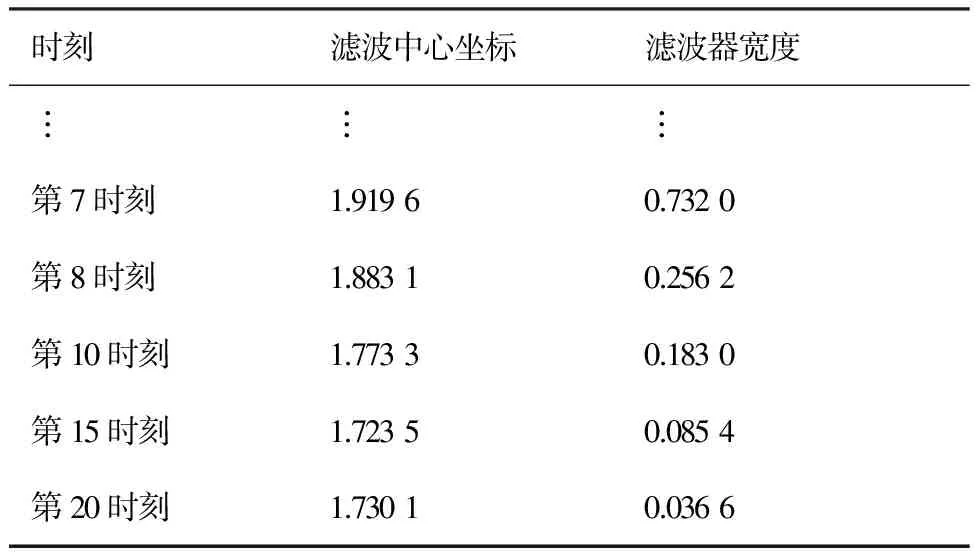
表4 濾波器參數(shù)Table 4 The filter parameter
圖13為加入反饋調(diào)節(jié)之后的目標檢測的結(jié)果。由圖13可以看出,數(shù)據(jù)層的反饋調(diào)節(jié)對目標航跡沒有產(chǎn)生影響,而對于噪聲航跡而言,數(shù)據(jù)層的反饋直接導致了其航跡中斷,可見,數(shù)據(jù)層的反饋調(diào)節(jié)能夠起到較好的噪聲航跡剔除作用。
將本文算法與文獻[24]中算法的目標檢測概率進行比較,蒙特卡羅實驗次數(shù)為200次,實驗結(jié)果如圖14所示。
由圖14可以看出,本文算法優(yōu)于文獻[24]中的算法,并且將壓制干擾下的目標檢測信干比提高了約10 dB左右,能夠應用于信干比更低時的情況。
4 結(jié) 論
針對射頻噪聲干擾抑制問題,本文提出了一種預估-反饋聯(lián)合處理算法。通過仿真實驗證明了本文算法能夠在信干比較低的情況下,實現(xiàn)對射頻噪聲干擾的抑制以及對目標的檢測,并且該算法較傳統(tǒng)算法具有更優(yōu)的干擾抑制能力。
1)通過對信號層算法與數(shù)據(jù)層算法關(guān)聯(lián)信息的提取以及反饋調(diào)節(jié)量的構(gòu)建,實現(xiàn)了對射頻噪聲干擾的一體化抑制,有效提高了本文算法的干擾抑制能力。
2)利用數(shù)據(jù)層對目標徑向速度的預測信息,合理構(gòu)建能夠調(diào)節(jié)信號層算法參數(shù)的反饋調(diào)節(jié)量,從而保證信號層處理算法的有效性和實時性。
3)通過仿真實驗與文獻[24]中基于Radon-分數(shù)階傅里葉變換的算法進行了比較,證明了本文算法在射頻噪聲干擾環(huán)境中具有更好的目標檢測能力。
參 考 文 獻
[1] 趙國慶. 雷達對抗原理[M]. 西安: 西安電子科技大學出版社, 2012: 122-123.
ZHAO G Q. Radar countermeasure principle[M]. Xi’an: Xidian University Press, 2012: 122-123 (in Chinese).
[2] 李冬霞, 崔顏敏, 劉海濤, 等. 基于JADE的測距儀脈沖干擾抑制技術(shù)[J].系統(tǒng)工程與電子技術(shù), 2016, 38(2): 423-427.
LI D X, CUI Y M, LIU H T, et al. Distance measure equipment impulse interference mitigation method based on JADE[J]. Systems Engineering and Electronics. 2016, 38(2): 423-427 (in Chinese).
[3] 溫媛媛, 陳豪. 基于時域卷積盲信號分離的雷達干擾抑制技術(shù)算法[J].中國科學院大學學報, 2013, 30(4): 523-527.
WEN Y Y, CHEN H. Algorithm of radar interference suppression based on blind signal separation in the time domain[J]. Journal of University of Chinese Academy of Sciences, 2013, 30(4): 523-527 (in Chinese).
[4] JONEIDI M, ZAEEMZADEH A, REZAEIFAR S, et al. LFM signal detection and estimation based on sparse representation[C]∥Information Sciences and Systems. Piscataway, NJ: IEEE Press, 2015: 1-5.
[5] JIN Y, DUAN P, JI H. Parameter estimation of LFM signals based on scaled ambiguity function[J]. Circuits Systems & Signal Processing, 2016, 35(12): 1-18.
[6] DING Y, SUN L, ZHANG H, et al. A multi-component LFM signal parameters estimation method using STFT and Zoom-FRFT[C]∥IEEE International Conference on Communication Software and Networks. Piscataway, NJ: IEEE Press, 2016: 112-117.
[7] LIU D, LIU Y, CAI H, et al. Linear frequency-modulated continuous wave active sonar signal processing[C]∥OCEANS. Piscataway, NJ: IEEE Press, 2014: 1-5.
[8] 陳小龍, 關(guān)鍵, 劉寧波, 等. 基于FRFT的LFM信號自適應濾波算法及分析[J]. 現(xiàn)代雷達, 2010, 32(12): 48-53.
CHEN X L, GUAN J, LIU N B, et al. Adaptive filtering algorithm for LFM signal and performance analysis based on FRFT[J]. Modern Radar, 2010, 32(12): 48-53 (in Chinese).
[9] 賀達超, 王國宏, 孫殿星. 壓制干擾下長基線雷達網(wǎng)多目標跟蹤技術(shù)[J]. 指揮控制與仿真, 2015(6): 1-7.
HE D C, WANG G H, SUN D X. Multi-target tracking technique for long baseline radar network in the presence of suppressive jamming[J]. Command Control & Simulation, 2015(6): 1-7 (in Chinese).
[10] 王國宏, 李世忠, 白晶, 等. 壓制干擾下組網(wǎng)雷達目標檢測與跟蹤技術(shù)[J]. 宇航學報, 2012, 33(12): 1781-1787.
WANG G H, LI S Z, BAI J, et al. Target detection and tracking technique for radar network in the presence of suppressive jamming[J]. Journal of Astronautics, 2012, 33(12): 1781-1787 (in Chinese).
[11] 李世忠, 王國宏, 白晶, 等. 壓制干擾下雷達網(wǎng)點目標概率多假設跟蹤算法[J]. 西安交通大學學報, 2012, 46(10): 101-106.
LI S Z, WANG G H, BAI J, et al. A tracking algorithm with multiple probabilities hypothesis for radar network point target in the presence of suppressive jamming[J]. Journal of Xi’an Jiaotong University, 2012, 46(10): 101-106 (in Chinese).
[12] 徐海全, 王國宏, 關(guān)成斌. 遠距離支援干擾下的目標跟蹤技術(shù)[J]. 北京航空航天大學學報, 2011, 37(11): 1353-1358.
XU H Q, WANG G H, GUAN C B. Tracking technique in the presence of standoff jamming[J]. Journal of Beijing University of Aeronautics and Astronautics, 2011,37(11): 1353-1358 (in Chinese).
[13] 謝艾彤. 低信噪比信號的檢測與參數(shù)估計方法研究[D]. 成都: 電子科技大學, 2007: 33-35.
XIE A T. Study on detection and parameter estimation of signal in low signal-to-noise ratio[D]. Chengdu: Electronic Science and Technology University, 2007: 33-35 (in Chinese).
[14] 杜東平. 雷達壓制式干擾抑制算法研究[D]. 成都: 電子科技大學, 2008: 24-27.
DU D P. The research of radar pressure jamming suppression algorithm[D]. Chengdu: Electronic Science and Technology University, 2008: 24-27 (in Chinese).
[15] 李智明. 基于改進Fast ICA算法的混合語音盲分離[D]. 上海:上海交通大學, 2015: 21-43.
LI Z M. Blind separation of mixed audio signals based on improved fast ICA[D]. Shanghai: Shanghai Jiao Tong University, 2015: 21-43 (in Chinese).
[16] 齊林, 陶然, 周思永, 等. 基于分數(shù)階Fourier變換的多分量LFM信號的檢測和參數(shù)估計[J]. 中國科學, 2003, 33(8): 749-759.
QI L, TAO R, ZHOU S Y, et al. Detection and parameter estimation of multi-component LFM signals based on fractional Fourier transform[J]. Science in China, 2003, 33(8): 749-759 (in Chinese).
[17] 劉鋒, 徐會法, 陶然. 基于FRFT的對稱三角LFMCW信號檢測與參數(shù)估計[J]. 電子與信息學報, 2011, 33(8): 1864-1870.
LIU F, XU H F, TAO R. Detection and parameter estimation of symmetrical triangular LFMCW signal based on Fractional Fourier transform[J]. Journal of Electronics & Information Technology, 2011, 33(8): 1864-1870 (in Chinese).
[18] 陶然, 鄧兵, 王越, 等. 分數(shù)階傅里葉變換及其應用[M]. 北京: 清華大學出版社, 2009: 11-12.
TAO R, DENG B, WANG Y, et al. Fractional Fourier transform and its applications[M]. Beijing: Tsinghua University Press, 2009: 11-12 (in Chinese).
[19] 張賢達. 信號處理中的線性代數(shù)[M]. 北京: 北京科學出版社, 1997: 65-67.
ZHANG X D. Linear algebra in signal processing[M]. Beijing: Beijing Science Press, 1997: 65-67 (in Chinese).
[20] 張峰, 陶然. 分數(shù)階Fourier域譜估計及其應用[J]. 電子學報, 2008, 36(9): 1723-1727.
ZHANG F, TAO R. Power spectral estimation and its application in Fractional Fourier domain[J]. Acta Electronica Sinica, 2008, 36(9): 1723-1727 (in Chinese).
[21] 王瑜, 李小波, 周青松, 等. 基于FRFT窄帶濾波的LFM信號研究[J]. 火力與指揮控制, 2016, 41(12): 41-43.
WANG Y, LI X B, ZHOU Q S, et al. Study of LFM signal based on FRFT domain narrowband filter[J]. Fire Control & Command Control, 2016, 41(12): 41-43 (in Chinese).
[22] 何友, 修建娟, 張晶煒, 等. 雷達數(shù)據(jù)處理及應用[M]. 北京: 電子工業(yè)出版社, 2010: 117-118.
HE Y, XIU J J, ZHANG J W, et al. Radar data processing with applications[M]. Beijing: Electronic Industry Press, 2010: 117-118 (in Chinese).
[23] 孫殿星. 雷達網(wǎng)抗欺騙式干擾技術(shù)研究[D]. 煙臺: 海軍航空工程學院, 2015: 81-82.
SUN D X. Research on anti-spoofing technology of radar network[D]. Yantai: Naval Aeronautical and Astronautical University, 2015: 81-82 (in Chinese).
[24] 陳小龍, 劉寧波, 王國慶, 等. 基于Radon-分數(shù)階傅里葉變換的雷達動目標檢測方法[J]. 電子學報, 2014, 42(6): 1074-1080.
CHEN X L, LIU N B, WANG G Q, et al. Radar detection method for moving target based on Radon-fractional Fourier transform[J]. Acta Electronica Sinica, 2014, 42(6): 1074-1080 (in Chinese).
猜你喜歡
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25