基于滑模控制器的雙饋異步風力發電機組低電壓穿越控制策略
2018-04-09 08:09:19趙長風
通信電源技術 2018年1期
趙長風
(三峽大學 電氣與新能源學院,湖北 宜昌 443002)
0 引 言
雙饋異步風力發電機組因其高性價比的優勢得到了廣泛應用。隨著風電裝機容量逐年上升,世界各國電力系統對風電機組低電壓穿越能力要求也越來越嚴格。對于雙饋式風力發電機組,當電網發生故障容易導致風力發電機機端電壓跌落,造成發電機定子電流突然增加。由于轉子與定子之間的強耦合性,快速增加的定子電流會導致轉子電流急劇上升[1]。所以必須采取有效的控制策略限制 DFIG 在電網電壓驟降時的轉子電流沖擊,避免對變頻器造成危害,另外還要盡可能減少機械轉矩越變,防止齒輪箱和風機產生機械損害。
現有技術中,提高DFIG的低電壓穿越能力的方式大致可以分為三類:一是對風機本體增加硬件保護設備,通過增加額外耗能以消耗DFIG多余的能量,保護變頻器的安全[2]。二是使用能量存儲系統,提高風電場整體故障穿越能力[3]。三是在不增加硬件的基礎上改進電網故障時刻風力發電機組的控制策略。前兩種都存在其局限性,不僅會增加風電機組成本,降低可靠性,而且不能有效解決低電壓穿越過程中電流激增的問題。隨著我國風電行業逐步向西南地區等第四類風區發展,對風力發電機組低電壓穿越要求也在發生變化。西南高原地區極易受到雷擊影響,因此機組過電流保護定值設定相對較低以保障機組安全穩定運行。以貴州地區某風電場故障為例,該風電場電網波動致使風速較低的集電I、II線(平均風速<3.5 m/s)機組均順利完成低電壓穿越過程后35 kV低頻低壓解列裝置低壓減載動作集電線斷路器跳閘,但風速較高的集電III線(平均風速>7.5 m/s)卻有三臺風機在故障期間跳閘。事后查明三臺風機在低電壓穿越過程中產生大電流致使風機箱變過電流保護動作跳閘。風電場已對箱變定值進行調整但若要徹底解決此問題需對風電機組低電壓穿越控制策略進行優化。
本文針對電網故障時DFIG轉子側變頻器控制策略進行研究,在不增加硬件保護的基礎上,擴大風力發電機組安全運行范圍。設計電網電壓變化下的DFIG數學模型并基于滑模控制原理設計控制策略;基于抑制電磁功率傳遞的原理提出了電網故障時刻改進轉子側變頻器控制策略;針對本文所設計低電壓穿越方案的有效性進行了仿真驗證。
1 DFIG數學模型
從 DFIG 的運行原理和等效電路出發, 通常選用Park模型進行分析。根據電動機慣例, DFIG在兩相同步旋轉dq坐標系下定、轉子電壓方程和磁鏈方程可表示為[4]
(1)
(2)

由式子(1)、(2)可得轉子電壓方程:
(3)
由式(1)、(2)、(3)可得狀態方程:
(4)
(5)
2 滑模控制器設計
若采用傳統控制,穩態時使用一種正常控制策略,出現故障時配合增加硬件電路切換到相應的故障控制策略。轉子側變換器控制策略的切換或者重新投入運行,會給系統帶來不必要的沖擊。為增強DFIG控制的相應速度和抗干擾能力,本節根據 DFIG 的數學模型,對基于 DFIG 傳統數學模型的控制策略加以改進,不用進行控制策略的切換也不用增加任何硬件電路。既為控制策略的實施提供了方便也降低了成本。
定義切換函數如下:
(6)

對式(6)求導得
(7)
為減弱抖振并改善趨近運動的動態性能,采用指數趨近律,則由式(7)可得
(8)
其中, sat(s)為
(9)
聯立式(4)、(5)、(7)、(8)得轉子電壓方程:
(10)
由式(10)可得電網正常情況下轉子側變流器基于滑模控制器的控制方程。其控制原理圖如圖1所示。
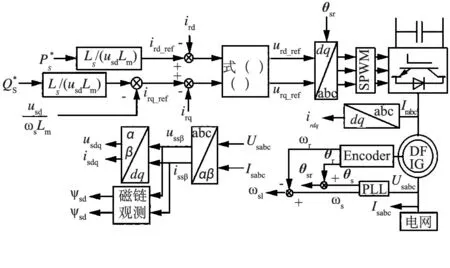
圖1 基于滑模控制器的轉子側變流器功率控制原理圖
3 轉子回路過電流抑制機理
DFIG實際上是一個三端口能量轉換系統,轉子軸端輸入機械能,定子向電網輸出電能,轉子的能量流動方向由 DFIG 的運行狀況決定。電動機慣例下DFIG的能量流動如圖2所示。當DFIG超同步運行狀態,風輪所捕獲的風能,通過機械能的方式輸入到機電耦合系統,經電磁能量轉換,以電能的形式從定子側和轉子側饋入到電網。其關系如下:
(11)
(12)
式中:Ws、Wr、Wm為定子輸入電能、轉子輸入電能和風輪輸入的機械能;es、er為定、轉子感應電動勢。
在電網電壓故障時, 定、轉子輸出的電能減少而風輪輸入的機械能不變。電壓變化導致了定子磁鏈的變化,此時定、轉子感應電動勢將發生變換,以使電端口輸出更多的能量,從而造成了定、轉子回路的浪涌電流。
轉子回路感應電動勢即為變頻器電動勢組成,當磁鏈中的直流暫態磁鏈衰減向外釋放能量時,變頻器電動勢向外輸出能量。因此,轉子感應電動勢可控部分只有運動電動勢。定子勵磁電流動態必須加以考慮,加入該補償量,可以反映定子電流的變化,進而通過調節轉子電壓來限制電流的沖擊。為減小這一部分感應電動勢,可得轉子電流參考值為:
(13)
結合式(2)對式(13)進行修正,得由定子磁鏈表示的轉子電流參考值:
(14)
將式(14)代入到電磁轉矩和轉子電磁功率表達式,可得
(15)
(16)
式(15)、(16)即為DFIG的控制策略,若轉子電流能快速跟蹤給定值,則電網故障時,轉子回路輸出的電磁功率為零,且電磁轉矩的振蕩能得到抑制。有效地減小了電網電壓驟降下 DFIG 轉子過電流和直流側過電壓的危害,并且能有效地克服系統的抖振。

圖2 電動機慣例下DFIG的能量流動
4 MATLAB仿真驗證
本文采用MATLAB/Simulink進行仿真研究,以驗證所改進低電壓穿越控制方案的正確性,以1臺2 MW的雙饋異步風力發電機組在電網對稱故障時為例。
實驗對本章所改進的控制策略和在傳統模型基礎采用的控制策略進行了比較。當t=0.2 s時機端電壓跌落到25%時的仿真結果,如圖3所示。設轉子側電流最大不超過2 p.u.。當檢測到電網故障時,轉子電流參考值切換到公式(14)。由圖3(a)可知,采用帶前饋補償的傳統矢量控制,電網故障時刻,轉子電流峰值為4 p.u.,電磁轉矩振蕩反向最大幅值達到1 p.u.。采用文獻[5]所提“滅磁”控制策略時,如圖3(b)所示,轉子電流峰值被限制在了2 p.u.,電磁轉矩的反向振蕩幅值達到了0.45 p.u.。圖3(c)所示采用本文所選控制策略時,轉子電流峰值減小到1.72 p.u.,且抑制電磁轉矩振蕩的控制效果明顯,電磁轉矩保持為零。電網電壓跌落至電壓恢復時刻,圖3(c)所示功率波形,相比(a)、(b)所示功率波形,滑模控制下轉子電流沖擊的幅值比傳統控制下其振蕩幅度和進入穩態的速度明顯縮短,轉子電流沖擊的幅值得到了很大的削弱,表明控制策略可對轉子電流實現有效的控制,可以防止故障時轉子及轉子側變換器的過電流。同時,可看出滑模控制策略下電磁轉矩的波動幅值明顯減小,因而有效減少對齒輪箱、轉軸等機械部件的沖擊,從而有效延長機械系統的使用壽命。

圖3 電壓對稱跌落到25%時DFIG仿真結果
5 結束語
本文基于滑模控制原理設計了電流控制器,通過提高控制的響應速度,減少DFIGD對電網的電流沖擊。從抑制能量向轉子側流動的角度考慮,根據DFIG 能量流動關系,提出了電網故障時刻轉子側變流器的改進控制策略。針對電壓對稱跌落進行了仿真驗證,證明了該方法能有效抑制電網故障時刻轉子側過電流,并對電磁轉矩的振蕩有很好的抑制效果,提高了在電網電壓驟降故障下的不間斷運行能力和低電壓穿越能力。
參考文獻:
[1]徐海亮,章瑋,賀益康,等. 雙饋型風電機組低電壓穿越技術要點及展望[J]. 電力系統自動化,2013,37( 20) : 8-15.
[2]賀益康,周鵬. 變速恒頻雙饋異步風力發電系統低電壓穿越技術綜述[J]. 電工技術學報,2009,24( 9) : 140-146.
[3]鄭雪梅,李琳,徐殿國. 雙饋風力發電系統低電壓過渡的高階滑模控制仿真研究[J]. 中國電機工程學報,2009( S1) : 178-183.
[4]王成元,夏加寬,孫宜標. 現代電機控制技術[M].北京: 機械工業出版社,2014.
[5]YAH S,AFLAKI M,REZAZADE A R. Optimal PWM for minimization of total harmonic currentdistortion in igh-power induction motors using geneticalgorithms[C].SICE-ICASE,2006: 5494-5499.
猜你喜歡
能源工程(2020年6期)2021-01-26 00:55:22
汽車維修與保養(2019年7期)2020-01-06 03:30:42
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
汽車維護與修理(2016年10期)2016-07-10 08:17:41
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34
