軍用增程式電動汽車增程器工作點選取策略設計
2018-04-10 06:16:54朱辰宇余卓平張培志曾德全
制造業自動化 2018年1期
朱辰宇,余卓平,熊 璐,張培志,曾德全
(同濟大學,上海 201804)
0 增程式電動汽車概述
增程式電動汽車是混合動力汽車的一種。它既能夠工作在純電動行駛模式,又能夠通過增程器發電為車輛提供動力、為動力電池充電。該種車輛僅需較小的電池容量就能夠達到正常的續駛里程。
增程式電動汽車采用如圖1所示的串聯式混合動力系統結構。發動機與發電機組成增程器,車輛靠電能驅動電動機帶動行駛。車輛以動力蓄電池作為主要動力源,以增程器作為輔助動力源。當增程式汽車工作在純電動行駛模式下,增程器不工作,動力電池作為唯一的能量源,此時其與純電動汽車工作原理完全相同,具有零油耗、零排放、噪聲小和舒適性好等特點。當動力電池電量低或者動力電池輸出功率小于需求功率時,增程器開始工作,發出的電能一部分可用于給動力電池充電,另一部分可直接提供給電動機驅動車輛行駛。增程器的加入大大延長了車輛的續航里程,減少了純電動汽車用戶對此的擔憂。

圖1 串聯式混合動力系統結構
增程式電動汽車的諸多優點也引起了軍方關注。軍用特種車輛具有輸出功率大、機動性和通過性強、工作可靠等特點。將增程式混合動力系統引入軍用車輛中,可以有效提升軍用車輛的各種性能,如增強動力性、隱蔽性、通過性、降低油耗、成為移動電站等,使得其能夠更好適應戰場環境。
本文研究對象是一輛增程式混合動力、輪邊電機驅動、差動轉向的水陸兩棲汽車。其底盤傳動系統機械結構、車輛實物分別如圖2、圖3所示。車輛具有兩個動力源,發動機與發電機通過機械連接組成增程器,電機控制器為四合一控制器,同時控制散熱風扇電機、發電機和兩個輪邊電機,動力電池給電機控制器供電。
1 增程式混合動力系統模型建立
為了設計旨在提高整車經濟性的增程器不同輸出功率下的工作點選取策略,本文搭建了增程式混合動力系統模型,包括發動機模型、發電機模型和增程器模型。

圖2 試驗車底盤傳動系統機械結構

圖3 試驗車實物圖
1.1 柴油發動機數學模型
發動機是增程器的重要組成部件之一,發動機的建模對增程器的控制策略設計有很大影響。發動機是一個強非線性、強耦合、時變動力學系統,本文中提出的對于發動機的控制是指通過控制發動機油門開度來改變發動機的輸出扭矩,故不考慮發動機缸內復雜的燃燒過程,同時對發動機模型的輸入、輸出信號及內部參數進行簡化,選取利用試驗數據建模和參數擬合的方法對其建模。
在本文建立的模型中,輸入信號為油門開度和負載扭矩,輸出變量為發動機輸出扭矩、轉速和燃油消耗量。本文中車輛使用增程器中發動機為四缸柴油機,排量1.4L,采用渦輪增壓,最大轉速4800rpm,最大扭矩212Nm,最大功率70kW。
通過發動機在測功機上的臺架測試并使用多項式進行數據擬合,獲得了如圖4所示的發動機外特性與部分負荷特性圖,即將發動機穩態輸出轉矩表示為油門開度、發動機曲軸轉速的函數。

圖4 發動機外特性與部分負荷特性圖
發動機產生的能量部分需用來克服機械摩擦阻力,其來源于內部各個部件的相互滑動和滾動。發動機內部摩擦扭矩主要與轉速、溫度有關,本文使用的發動機內部摩擦扭矩特性如圖5所示。
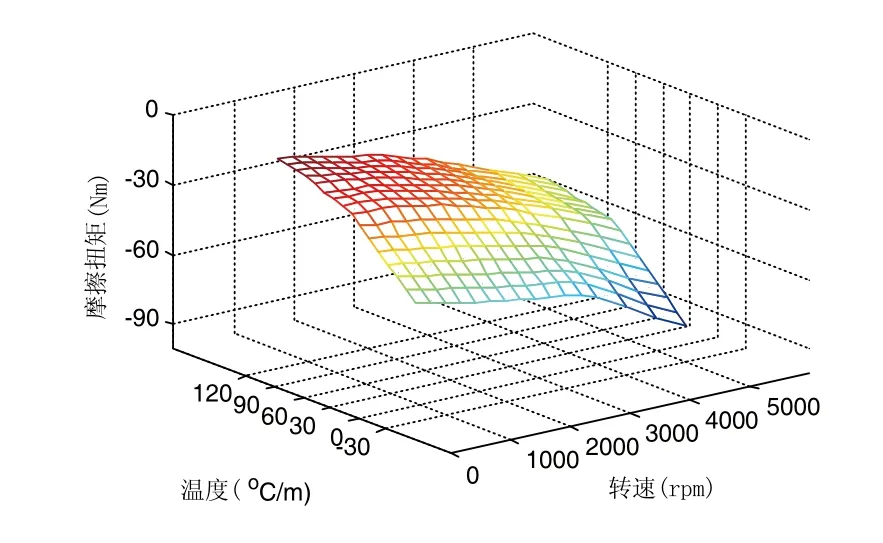
圖5 發動機內部摩擦扭矩特性圖
發動機輸出扭矩是發動機通過燃油燃燒產生有效轉矩克服機械摩擦阻力輸出至飛輪的扭矩。可以得到發動機輸出扭矩特性圖如圖6所示。

圖6 發動機輸出扭矩特性圖
可以建立發動機的動力學方程,其表達式為:

式中,Je為發動機轉動慣量,ω和n均為發動機曲軸轉速,ω單位為rad/s,n單位為rpm,Tei(α,n)為發動機輸出扭矩,α為油門開度,Tf(n)為發動機阻力矩,Tt為發動機負載扭矩。

發動機曲軸轉速為:上述發動機特性均是是穩態下的特性,考慮到發動機油門是從伺服控制器輸出的模擬電壓值,會存在一個動態過程,這里利用一個傳遞函數來描述發動機力矩的建立過程,即:

發動機油耗的高低表征發動機的經濟性,在不同的轉矩、轉速工作點中發動機的油耗量不同,工程上通常使用油耗消耗率來表征發動機的燃油經濟性,燃油消耗率b是指單位之間內發動機油耗量與此時發動機輸出的實際功的比值。工程上使用發動機萬有特性來描述燃油消耗率,發動機萬有特性即是轉矩、轉速對應的燃油消耗率(g/kWh)的圖像,通過試驗獲取,本文研究的發動機的萬有特性如圖7所示。
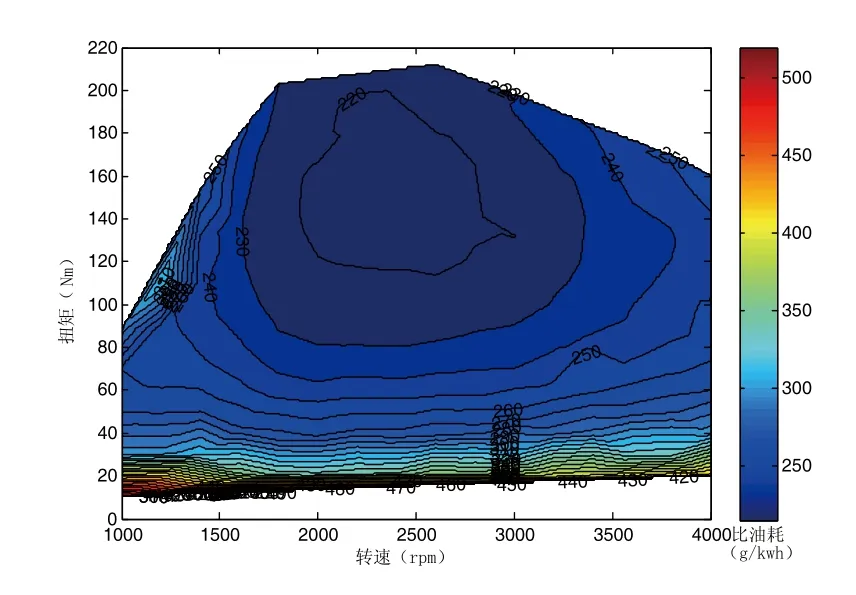
圖7 發動機萬有特性圖
1.2 發電機數學模型
發電機有兩種工作模式,一種是作為起動電機拖動發動機起動,另一種是作為發電機與發動機配合產生電能。發電機使用永磁同步電機,本文對發電機的模型建立主要包括電機的外特性、效率特性。其中發電機扭矩特性和效率特性通過臺架試驗測得,如圖8所示,由于試驗條件限制,僅測得發電機外特性能夠全部包含發動機外特性的特性曲線。

圖8 發電機扭矩特性和效率特性
1.3 增程器數學模型
增程器工作點的控制模式為功率跟隨式,即增程器需要在全功率范圍內工作。在同一功率下可以獲取多種轉速和轉矩的組合,因此需要選取增程器各個功率下的工作點。對于發電機來說,不同的工作點的區別表現在其效率的不同,發電機的效率場如圖8所示,可見電機效率與電機轉速、轉矩相關,為了提高能量的利用效率,應使發電機盡可能工作在效率高的區域。對于發動機來說,工作點表征了發動機的油耗特性、排放特性,合理選擇發動機工作點能夠降低整車油耗、提高整車排放性能,應該使發動機工作在燃油消耗率低,有害氣體排放量低的工作點,由于軍用汽車對尾氣排放不做要求,因此本文僅選擇燃油消耗率作為優化目標,其優化依據圖7所示的發動機萬有特性。
通常增程器優化使用發動機的最佳制動燃油消耗率曲線(brake specific fuel consumption,BSFC)來確定發動機和發電機工作點,但是由于發動機最佳燃油消耗率的工作點和電機效率最高的工作點并不一定重合,電機效率高的工作區域發動機燃油消耗率反而高。而且,電機控制器將發電機產生的交流電通過逆變器整流成直流電傳送到直流母線上,逆變器會產生一定的能量消耗,本文使用的電機控制器使用IGBT整流,這里取其效率為96%。因此,應該將電機效率、電機控制器效率與發動機的萬有特性共同考慮,選擇整個發動機和發電機工作在具有最高燃油-電能轉換效率的工作點,使增程器系統工作在經濟性較高的工作區域。
增程器系統的輸出功率由發動機、發電機和電機控制器共同決定,可以用式(4)來表示:

式中,PAPU為增程器發電功率,單位kW,Tg為發電機轉矩,單位Nm,ng為發電機轉速,單位rpm,ηg為發電機效率,ηmc為電機控制器效率,其值為96%。
發動機曲軸與發電機轉子之間通過花鍵剛性連接,我們假設曲軸以及轉子為剛體而且二者之間連接沒有縫隙,且能量傳遞效率為100%,那么可以認為發動機輸出轉矩Te、轉速ne與發電機轉矩Tg、轉速ng相同,即:


因此式(4)可表示為:增程器工作點優化問題中,優化自變量為發動機的轉矩Te和轉速ne。在車輛行駛過程中,根據整車功率平衡算法得到的電流Iexp_APU和當前發電機控制器端直流母線電壓Ug可以計算得出增程器系統的需求功率PAPU。由前文可得,在某一工作點下發動機的燃油消耗率為某一常值,故當增程器系統功率為某一值Pi時,其對應的發動機燃油消耗率bi可以用式(8)表示:


考慮到電機效率場,發動機實際輸出扭矩到電機輸出端存在能量消耗,發動機燃油消耗率最好的工作區域并不意味著發電機的效率同樣高,在設計策略中希望增程器整體效率高,因此需要計算增程器在某一工作點下的總效率。這里通過能量轉遞路徑,引入增程器系統油電轉換效率ηapu:

式中,b為發動機燃油消耗率,q為柴油燃料熱值,這里取q=42.6MJ/kg。通過轉換后,可得到增程器系統能量效率場如圖9所示。
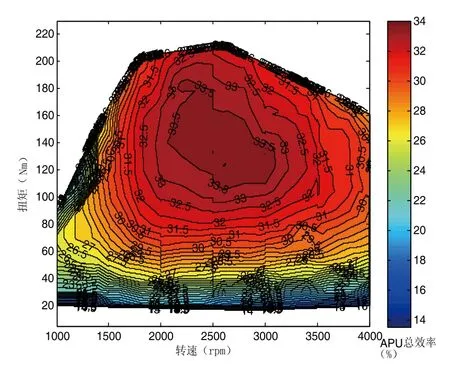
圖9 增程器系統能量轉換效率
2 增程器工作點選取策略
通過上文所述的增程式混合動力系統模型,我們可以確定旨在提高整車經濟性的增程器工作點選取策略。式(9)即為增程器工作點的優化目標。在車輛行駛中,根據對增程器的功率需求合理分配發動機的轉矩和轉速,以實現增程器的燃油消耗量最小。
增程器的工作點選取受到以下條件約束:
1)轉矩能力限制,如式(10)所示:

式中,Tg-max和Te_max分別為發電機和發動機的外特性力矩,單位Nm,它們是關于轉速的函數。
2)轉速能力限制,如式(11)所示:

式中,ng_max和ne_max分別為發電機和發動機的最大轉速,nidle為發動機怠速轉速,單位rpm。
3)工作點之間的轉速差值。
發動機的轉速升高時,噪聲和振動會明顯增加,而且若功率增加時發動機轉速變化趨勢不同,會影響駕駛感覺和舒適性。因此確定功率增大時,發動機轉速增加,即當P1>P2時,n1>n2。
由于發動機及發電機響應需要時間,轉速的建立是相對滯后的,因此在相鄰工作點之間轉速差值不能太大,否則在轉速控制中會出現劇烈抖動,功率輸出不容易穩定。
本文以1kW為精度,對增程器運行的全工況所需求的期望功率工作點進行優化。圖10給出了不同給定功率下增程器的可行工作點曲線,對于每一條曲線,找出其在增程器能量轉換效率圖上的效率最高點,得到如圖11中星號連接成的最佳燃油經濟性曲線。根據該曲線,可以求得增程器在每一輸出功率PAPU0下的工作點(Te0,ne0,PAPU0),并且最終確定增程器最大功率為65kW。

圖10 不同功率下增程器可行工作點圖
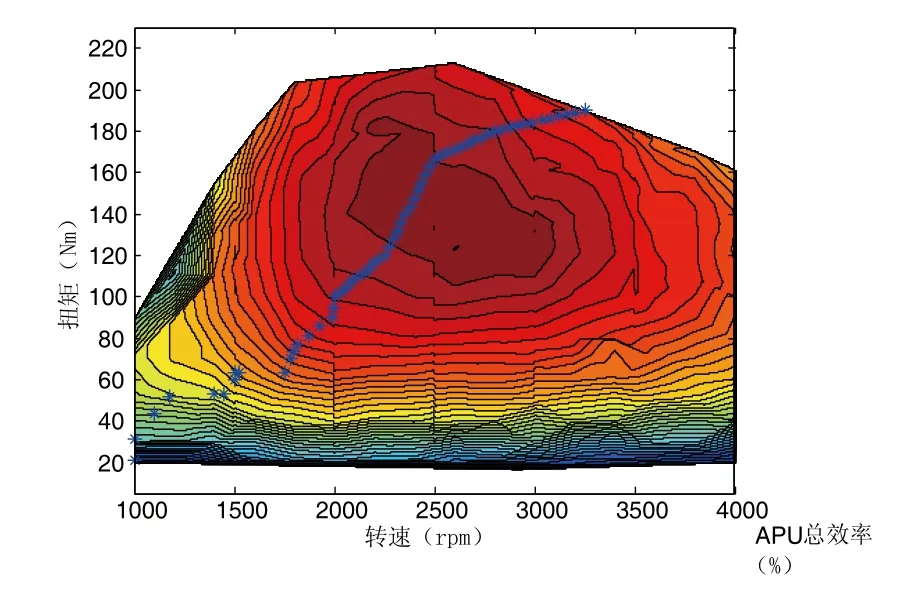
圖11 增程器最佳燃油經濟性曲線圖
根據最佳燃油經濟性曲線,確定了每一輸出功率 PAPU0下最佳經濟性對應的輸出扭矩Te0和輸出轉速ne0。根據圖6所示的發動機輸出扭矩特性圖可以反推出不同輸出功率所對應的油門踏板開度。最終結果如圖12 所示。

圖12 最佳燃油經濟性下的油門開度-輸出功率圖
3 工作點選取策略實車試驗驗證
為了驗證上文工作點選取策略的有效性,我們進行了實車試驗驗證。驗證結果分為以下三個部分:
3.1 輸出功率跟隨驗證
在不同時段給定系統的需求功率的條件下,系統輸出功率如圖13所示。
圖中的紅線為需求功率,藍線為輸出功率,由式(7)得到。由圖13可知,在不同時間段下,系統輸出功率在需求功率±1kW范圍內振蕩,這是由電機機械功率與電磁功率不平衡,電機的電流、電壓周期性變化引起的,屬于正常現象。總體而言,系統的輸出功率能夠較穩定地跟隨需求功率。
3.2 輸出電機轉速跟隨驗證
不同時段系統的需求電機轉速、輸出電機轉速如圖14所示。

圖13 系統輸出功率跟隨圖

圖14 系統輸出電機轉速跟隨圖
在給定系統需求功率后,可以通過圖11所示的增程器最佳燃油經濟性曲線求出系統的需求轉速。由圖14可知,系統的輸出電機轉速除在需求功率跳變時有較大振蕩(圖中紅線直角處常伴隨藍色尖角)外,可以很好地跟隨需求電機轉速,振蕩幅度不超過±20rpm,系統響應迅速。
3.3 輸出油門開度跟隨驗證
不同時段系統的需求油門開度、輸出油門開度如圖15所示。

圖15 系統輸出油門開度跟隨圖
在給定系統需求功率后,可以通過圖12所示的增程器最佳燃油經濟性下的油門開度-輸出功率曲線求出系統的需求油門開度。由圖15可知,系統的輸出油門開度響應迅速,且只有±1%的振蕩,這是由輸出油門開度步長為1%決定的,屬于正常現象。
4 結束語
本文搭建了針對軍用增程式電動汽車的混合動力系統模型,設計了旨在提高整車經濟性的增程器不同輸出功率下的工作點選取策略,通過實車試驗驗證了策略的有效性。該控制策略作為增程式電動汽車整車管理策略的重要組成部分,對于提高整車經濟性,提升整車的續駛里程有重要意義。
參考文獻:
[1]周飛鯤.純電動汽車動力系統參數匹配及整車控制策略研究[D].吉林大學,2013.
[2]尹安東.基于混合系統理論的混合動力客車控制策略和參數優化研究[D].合肥工業大學,2010.
[3]葉先軍.單軸ISG混合動力汽車轉矩分配控制策略的研究[D]. 合肥工業大學,2012.
[4]吳迪.ISG混合動力汽車能量優化管理策略研究[D].合肥工業大學,2013.
[5]朱明方.并聯混合動力汽車控制策略和軟件設計的研究[D].吉林大學,2004.
[6]易文平.增程式電動汽車輔助動力系統的電磁干擾分析與預測[D].吉林大學,2016.
[7]陳辛波,劉浩,鐘再敏,等.分布式驅動電動汽車的開發和行駛能耗優化分析[J].汽車技術,2014(7):39-43.
[8]董欣陽.增程式電動轎車動力系統控制策略設計及優化研究[D].合肥工業大學,2015.
[9]王慶年,曾小華,王偉華.混合動力技術在軍用汽車上的應用[J]. 吉林大學學報(工),2003,33(1):38-41.
[10]萬仁君.電動汽車分布式控制系統的總線調度與整車控制策略的研究[D].天津大學,2004.
[11]盧兵.前后軸獨立驅動增程式電動車輛整車控制策略研究[D]. 北京理工大學,2015.
[12]劉吉順,李駿,劉明輝,趙子亮,郭洪江. 純電動轎車整車控制策略開發與試驗研究[A].中國智能交通協會.第六屆中國智能交通年會暨第七屆國際節能與新能源汽車創新發展論壇優秀論文集(下冊)——新能源汽車[C].中國智能交通協會,2011:9.
[13]徐群群,宋珂,洪先建,等.基于自適應遺傳算法的增程式電動汽車能量管理策略優化[J].汽車技術,2012(10):19-23.
[14]申永鵬,王耀南,孟步敏.電動汽車增程器燃油效率優化控制[J]. 控制理論與應用,2014(6):701-708.
[15]左義和,項昌樂,閆清東.基于功率跟隨的混聯混合動力汽車控制策略[J].農業機械學報,2009,40(12):23-29.
[16]嚴海波,樓狄明,徐寧,等.電動公交客車用增程器控制策略試驗研究[J].小型內燃機與摩托車,2016,45(4):1-7.
[17]Millo F,Rolando L, Mallamo F, et al. Development of an optimal strategy for the energy management of a range-extended electric vehicle with additional noise, vibration and harshness constraints[J].Proceedings of the Institution of Mechanical Engineers Part D Journal of Automobile Engineering,2013, 227(1):4-16.
[18]Li J, Jin X, Xiong R.Multi-objective optimization study of energy management strategy and economic analysis for a range-extended electric bus[J].Applied Energy,2016.
[19]Du J, Chen J,Song Z, et al. Design method of a power management strategy for variable battery capacities range-extended electric vehicles to improve energy efficiency and cost-effectiveness[J]. Energy,2017,121:32-42.
[20]Rez L V, Pilotta E A.Optimal power split in a hybrid electric vehicle using direct transcription of an optimal control problem[J]. Mathematics & Computers in Simulation,2009,79(6):1959-1970.
[21]Hemi H, Ghouili J, Cheriti A. A real time fuzzy logic power management strategy for a fuel cell vehicle[J].Energy Conversion & Management,2014,80(4):63-70.
[22]Feldkamp L,Abou-Nasr M, Kolmanovsky I V. Recurrent neural network training for energy management of a mild Hybrid Electric Vehicle with an ultra-capacitor[A].Computational Intelligence in Vehicles and Vehicular Systems, 2009. CIVVS‘09.IEEE Workshop on.IEEE[C],2009:29-36.
[23]Mura R, Utkin V,Onori S. Energy Management Design in Hybrid Electric Vehicles:A Novel Optimality and Stability Framework[J]. IEEE Transactions on Control Systems Technology,2015, 23(4):1307-1322.
猜你喜歡
故事作文·高年級(2021年12期)2021-12-21 02:32:35
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
智能建筑電氣技術(2015年5期)2015-12-10 05:52:30
汽車與新動力(2015年1期)2015-02-27 12:11:01
電力工程技術(2014年1期)2014-03-20 14:19:06
汽車與新動力(2014年2期)2014-02-27 12:10:15
汽車與新動力(2013年5期)2013-03-11 16:08:17
