履帶式聯合收割機轉向機構的結構特點及發展趨勢
2018-04-12 00:55:25李耀明朱磊華
農機化研究 2018年4期
關鍵詞:機械
馬 翔,李耀明,唐 忠,黃 錦,朱磊華
(江蘇大學 現代農業裝備與技術教育部重點實驗室,江蘇 鎮江 212013)
0 引言
履帶式水稻聯合收割機是我國水稻收獲的主要工具,而隨著我國水稻連片種植面積的增加,對水稻收獲機械作業效率和承載能力都提出了更高要求。為適應市場需求,水稻收獲機械的割幅、喂入量、整機質量都在逐漸增加,轉向行駛機構作為聯合收割機產品最重要的功率傳輸部件,其承載能力需要隨之增大[1-2]。履帶式水稻聯合收割機對轉向行駛機構的機動性和操控性要求也在不斷提高,因此對轉向行駛功能的原理研究、機構設計與開發成為提升履帶式水稻聯合收割機性能的關鍵之一[3-4]。
本文針對市場現有的轉向行駛機構,對靜液壓轉向行駛機構與液壓機械結合轉向行駛機構進行歸類綜述并闡述各種機構的工作原理及結構特點,討論了轉向行駛機構的發展趨勢。
1 履帶式聯合收割機轉向行駛機構特點
履帶式聯合收割機一般是在含水量較高的農田里工作,采用履帶式結構可以增加接觸面積,提高整機通過性。傳統的履帶式聯合收割機轉向行駛機構采用離合器機械變速箱轉向機構,隨著收割機整機功率的不斷增大,該機構存在操作復雜、工作效率低等問題,已經不能滿足市場的需求[5]。隨著機電一體化、液壓新技術的不斷更新,提高了轉向行駛機構的工作性能[6]。履帶式聯合收割機轉向行駛機構引入液壓技術,實現了前進速度和左右履帶速度的無級調節,提高了整機的機動性,使可靠性高、性能優良、工作效率高的轉向行駛機構成為可能,因此液壓技術在履帶式聯合收割機上得到了普遍應用[7-10]。根據液壓件與機械變速箱的不同組合方式,可將轉向行駛機構主要分為靜液壓轉向行駛機構和液壓機械結合轉向行駛機構[11-13],如表1所示。

表1 履帶式聯合收割機轉向行駛機構類型
1.1靜液壓轉向行駛機構
靜液壓轉向機構是指發動機驅動液壓油泵,將輸出的高壓油直接輸送給驅動輪上低速大扭矩的液壓馬達,直接控制車輛的直線和轉向行駛[14-15]。
現有國產靜液壓轉向機構有中聯重科4LZT-6.0ZB型聯合收割機的轉向行駛機構,如圖1所示。該結構將整機驅動輪后置,配以布雷維尼(Brevini)牌液壓馬達減速機,與前置的液壓油泵組成靜液壓轉向行駛機構,實現對車輛的轉向行駛控制。該機構的轉向行駛原理如圖2所示。工作時,通過調節液壓泵排量的正、反向來控制液壓馬達的正、反轉,實現履帶式車輛的轉向功能,而且可以使車輛的轉向半徑實現連續可控的無級變化。

圖1 4LZT-6.0ZB型聯合收割機轉向行駛機構

圖2 靜液壓轉向行駛原理圖
靜液壓轉向機構具有良好的傳動性能,操作方便,能夠實現車輛的無級變速,降低駕駛員的勞動強度,而且具有結構緊湊、質量輕、體積小、承載能力強等優點。采用該機構的收割機比采用機械轉向行駛機構的收割機工作效率高10%~30%[16];但是靜液壓轉向行駛系統速度調節范圍比較窄,一般適用于速度變化不大的場合[17-18],而且該技術存在噪音大、容易發生泄漏、造價昂貴等缺點,所以并沒有在收割機上普遍使用。
1.2液壓機械結合轉向行駛機構
液壓元件結合不同形式的機械變速箱組成的轉向機構是在傳統的機械變速箱轉向系統上,增加液壓無級變速器(HST),借此來高效地實現車輛的調速功能,以及履帶式聯合收割機的分段無級調速[19]。在此機構中的液壓泵具有較大的變量范圍,只要合理選擇速比和設置擋位,便可以得到比較理想的功率輸出特性[20]。
1.2.1液壓無級變速器(HST)的介紹
液壓無級變速器(Hydraulic Static Transmission)英文縮寫為HST,采用液壓靜力原理[21-22]。HST由1個液壓泵和1個液壓馬達組成,輔以控制裝置、速度調配裝置等,組成無級變速調控系統。使用過程中,通過操作桿調節液壓泵的輸出液壓油的流量和流向實現對液壓馬達輸出轉數和轉向的調節,即可實現車輛前進、后退的無級調速,是一種比較理想的無級變速裝置。
圖3是履帶式聯合收割機常用的HST調速系統。該系統為變量泵與定量馬達的容積調速泵,其回路是通過改變泵的排量來實現無級調速。工作時,馬達的回油重新回到泵的輸入油口,形成了液壓油的內部循環系統,構成閉式回路,省去了油箱環節,減少了空氣滲入引起的傳動效率低下等一系列問題[23]。

圖3 HST液壓原理圖
市場上提供的HST有很多種,主要根據排量來進行區分,排量區間一般為28~52mL/r。其中,48mL/r排量的HST的具體參數如表2所示。
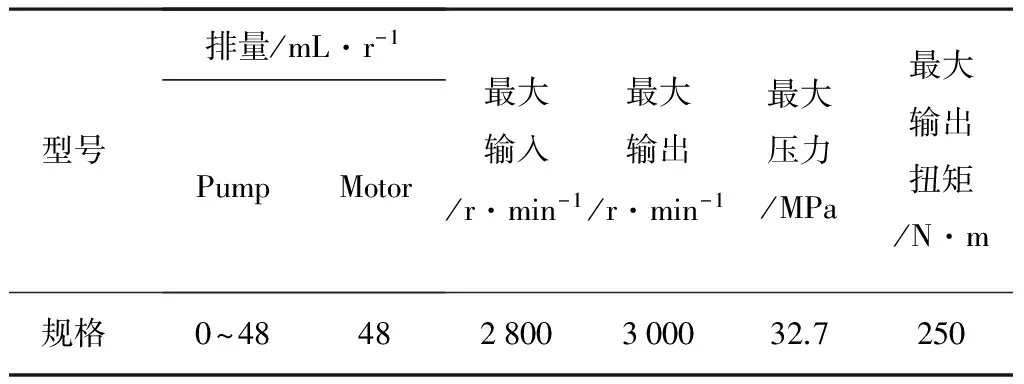
表2 48mL/r排量HST參數
HST的主要工作特點是對外載荷具有自動適應性,實現了傳動比的連續改變,能夠無級調速和變矩,提高了收割機的燃油經濟性和動力性,有效地改善了車輛的操控性和駕駛舒適性[24]。
1.2.2單HST配合傳統機械變速箱
HST配合三檔變速機械變速箱式轉向行駛機構可以改善車輛大半徑轉向的特性,使履帶式收割機具有較好的操控性[25]。HST驅動模式代替了純機械驅動的離合器和倒擋機構,簡化了車輛的轉向行駛機構[26]。由于此轉向行駛模式的優點突出,已經成為履帶式聯合收割機一種最常用的直線和轉向行駛控制方式[27]。
隨著履帶式聯合收割機發動機功率的增加,機械變速箱的承載功率也在隨之變化,配套的發動機功率范圍在40~80kW之間。例如,湖州聯達LD6(80)型變速箱配套的發動機動力為80kW。圖4為LD6型變速箱的實物圖,其技術參數如表3所示。

圖4 LD6(80)型變速箱

型號單位LD6(80)外形尺寸mm350×400×650發動機功率kW80最高輸入轉數r/min3000輸入方式HST無級變速制動方式濕式摩擦片傳動比38.513/23.62/16.432轉向結構牙嵌式凈重kg110
該類變速箱內部結構基本相似,其傳動原理如圖5所示。工作原理:發動機動力由皮帶輸出,傳遞給HST;由HST進行轉速的無級調整后將動力傳遞給變速箱的動力輸入軸,經過換擋變速軸的三聯齒輪傳遞給動力傳輸軸上;這兩根軸上的3對齒輪可以分別嚙合,組成高、中、低3擋的速度切換機構,隨后動力傳輸至制動軸上,此軸中間部位對稱安裝有左右兩對帶有牙嵌離合的齒輪,通過控制制動撥叉的旋轉角度,調整牙嵌齒輪的接合與斷開;并在斷開的同時,與惰軸齒輪嚙合的齒輪會被壓向側邊的制動箱內,通過摩擦片制動惰軸上的動力傳輸齒輪,切斷動力的傳遞,便完成“脫開-制動”這一個連續的操作過程。動力經過惰軸上的兩個套體齒輪進行降速增扭后,輸入給動力輸出半軸上,動力便傳遞至驅動輪上,完成整車的驅動[28-29]。
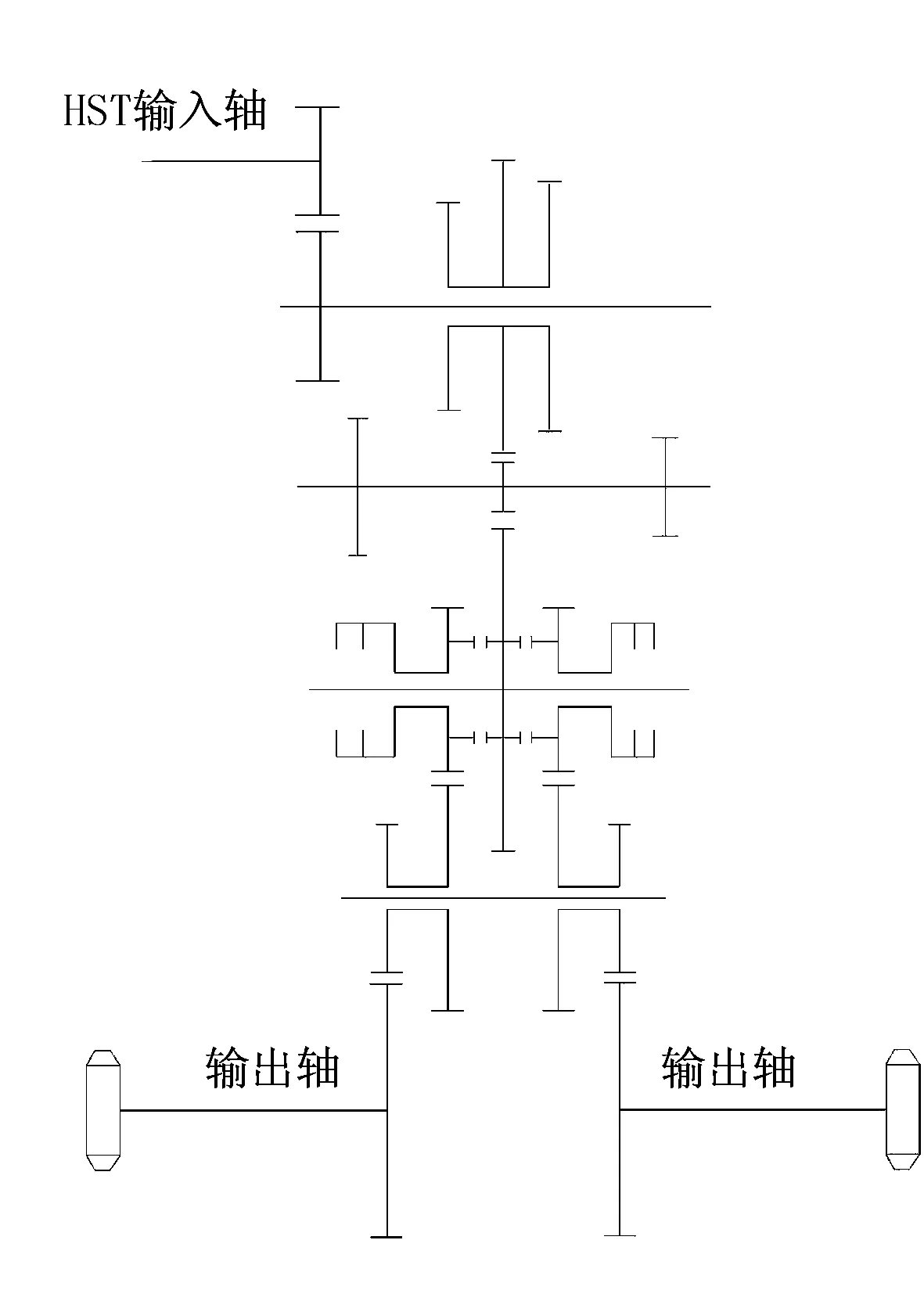
圖5 聯合收割機機械變速箱原理圖
液壓無級變速器(HST)與機械變速箱組合成一種新型的轉向機構,結構簡單,便于維修[30-31],能保證在連續無級轉速輸出的前提下應用較小的液壓元件來提高收割機的輸出功率。該機構已成為履帶式水稻聯合收割機一種主要的轉向行駛機構。
1.2.3單HST配合差逆機械變速箱
使用傳統機械變速箱在田間進行轉向作業時,對土壤產生明顯的剪切破壞,進而引起土壤的壅起。針對傳統變速箱出現的問題,履帶式聯合收割機上開始裝配差逆式機械變速箱,與HST組成新轉向行駛機構。現有的差逆式機械變速箱產品如圖6所示[32]。

圖6 差逆式機械變速箱實物圖
差逆式機械變速箱工作原理如圖7所示。其工作原理為:發動機將動力輸出至HST,經HST無級調速后,傳遞至差逆變速箱的3擋變速系統,該系統由換擋變速軸和動力傳輸軸組成,能夠完成高、中、低3擋傳動比的直線切換。動力由3擋變速系統傳遞至帶有牙嵌齒輪的牙嵌軸,該軸上左右對稱分布兩對牙嵌離合器齒輪,通過換向撥叉的作用,將牙嵌離合器齒輪撥開即可實現動力的切斷;通過復位彈簧的作用可以將牙嵌離合器齒輪復合,即可實現動力的接合。不切斷動力且制動器均處于松弛狀態時,可實現車輛的直線行駛狀態;在動力切斷時,通過不同液壓制動器的作用,實現對牙嵌齒輪不同方式的制動,來實現大半徑轉向、單邊制動轉向、差逆轉向3種不同的轉向模式[33]。

圖7 差逆變速箱工作原理圖
此轉向行駛機構較傳統機械變速箱,增加兩根液壓制動控制軸,所以其轉向消耗功率約比傳統單邊制動轉向增加 15%左右,但轉向半徑縮小約為87%,有效地改善了履帶式聯合收割機的轉向性能[34]。
1.2.4雙HST配合機械變速箱
此轉向行駛系統是采用兩臺HST控制一臺變速箱,來實現對履帶式聯合收割機的行駛控制。根據兩臺HST的分工不同,可將此機構分成兩種:并置直行HST與轉彎HST機構,并置左驅動HST與右驅動HST機構。
并置直行HST與轉彎HST機構是由兩臺HST分別控制履帶式聯合收割機的直行與轉彎功能,用變速桿來控制直行HST,用圓形轉向駕駛盤控制轉彎HST[35],其結構原理如圖8所示。在此操縱機構中,無論收割機是低速狀態或者高速狀態,駕駛員都可以進行轉彎操作。通過改變變速桿的操作角度來控制車輛前行的快慢,通過改變圓形轉向駕駛盤的轉動角度來變更左右驅動輪的速度比。另外,當變速桿的操作角不同時,即使圓形轉向駕駛盤的轉動操作角度相同,轉彎半徑也會不同。

圖8 并置直行HST與轉彎HST機構原理圖
并置左驅動HST與右驅動HST機構是將兩臺HST分別安裝在動力輸入輪的左右兩側,通過分半式的機械變速箱,分別控制履帶式聯合收割機左驅動輪和右驅動輪[36],其機構原理如圖9所示。工作時,通過轉向行駛控制桿來分別操控兩臺HST輸出的轉數和轉向,從而實現履帶式聯合收割機的前后行駛或左右轉向。

圖9 并置左驅動HST與右驅動HST機構原理圖
這兩種雙HST配合機械變速箱的轉向行駛機構將不同的功能進行分別控制,有效地提高了履帶式聯合收割機的操控性能,可實現原地轉彎和急轉彎的行駛需求;但此機構對車輛的空間布置也有較高的要求,不容易排布HST與變速箱的相對位置,也需要更改變速箱的基本結構(即需要開發與之匹配的特種變速箱),因此該轉向行駛控制機構沒有得到充分的實際應用。
2 履帶式聯合收割機轉向機構的發展趨勢
2.1靜液壓無級轉向行駛機構
要想實現履帶式聯合收割機轉向半徑連續無級變化的可控性能,使用容積式液壓泵配合液壓馬達等液壓元件是現實可行的辦法。液壓轉向行駛技術具有低能耗、易控制等優點,能很好地改善聯合收割機的性能。液壓技術逐漸向制造出功率大且性能優越的液壓元件的方向發展,解決了現有靜液壓無極變速的噪音與泄漏問題,其先進的設計理念、高技術的液壓元件都將會在收獲機械轉向行走系統中得到較快的發展與應用[18]。
2.2復合式轉向行駛機構
為了克服靜液壓轉向行駛機構的缺點,目前市場出現多種液壓無級變速器(HST)搭配機械變速箱的復合式轉向行駛方案。由于HST技術已經成熟,因此機械變速箱成為該機構中最關鍵的部件。
差逆式機械變速箱最核心的部件為行星齒輪組,其中錐齒輪由于一直處于工作狀態,且承受著較大的被動扭矩與載荷,因此經常出現錐齒輪磨損嚴重的現象,極大地影響著整機壽命;且履帶式聯合收割機行業的差逆變速箱技術還不成熟,導致HST配合差逆變速箱的轉向行駛機構還沒有在收割機行業內廣泛使用。但差逆變速箱具有轉向靈活、效率高和對土壤的剪切破壞少的特點,符合履帶式聯合收割機行業大割幅、高功率的發展需求,故隨著差逆變速箱技術的進步,此類變速箱也將在收獲機械行業占有一定比重。
傳統機械變速箱是單邊制動式變速箱,在轉向時需對一側進行反復制動,且摩擦片的制動作用使得在制動位置的齒輪承受較大扭矩,對齒輪材料的選擇和加工工藝上都提出了較高的要求[37]。因此,機械變速箱會著重于提高齒輪的承載能力,改善齒輪與軸等關鍵部件的加工工藝,來解決變速箱的壽命問題,提高變速箱的可靠性。
由于履帶式聯合收割機割幅、功率和自重均在不斷增加,配套發動機功率已經超過90kW,要求機械變速箱有更高的承載能力。因此,變速箱設計理念也將不斷改進,對于齒輪的設計將遵循真實的工作嚙合時長來分配齒輪的壽命,真正實現所有齒輪的等壽命設計;設計過程也將摒棄純理論計算設計而是采用理論計算、軟件設計、軟件力學分析三合一的設計理念,來縮短設計周期,并有效地改善齒輪可靠性問題;對于變速箱箱體的設計也將向著輕量化的發向發展,并且一體式殼體也將取代分半式殼體,克服分半式殼體帶來的密封問題和同軸度差的問題,全方位把控高功率變速箱的設計與加工過程,提高可靠性、延長使用壽命。
3 結論
通過對履帶式聯合收割機轉向機構的歸類總結,將轉向機構分為靜液壓轉向行駛機構、單液壓無級變速器配合傳統機械變速箱、單液壓無級變速器配合差逆機械變速箱、雙液壓無級變速器配合傳統機械變速箱4類,并對4類轉向行駛機構的工作原理、結構特點和優缺點進行了分析。
由此可見,靜液壓轉向行駛機構存在造價昂貴、容易發生泄漏等明顯的缺陷,限制了此機構在履帶式聯合收割機行業的發展。液壓機械復合式的轉向機構仍是履帶式聯合收割機主要的轉向行駛機構,而機械變速箱性能的優良在該機構中起著關鍵的作用。其中,差逆變速箱由于可以有效地減小車輛轉彎半徑及對土壤的剪切破壞,將會受到履帶式聯合收割機市場的青睞。傳統機械變速箱也將在設計理念和加工工藝上進行改進,提高變速箱的承載能力和可靠性,來適應履帶式聯合收割機向大功率方向發展的需求。
參考文獻:
[1]鄧玲黎,李耀明.我國水稻聯合收割機的現狀及發展趨勢[J].農機化研究,2001(2):4-6.
[2]陳慶文,韓增德,崔俊偉,等.自走式谷物聯合收割機發展現狀及趨勢分析[J].中國農業科技導報,2015,17(1):109-114.
[3]王飆,劉峰,李云伍.我國水稻收割機的發展現狀及發展方向[J].農機化研究,2013,35(10):226-229.
[4]王剛,吳崇友,伍德林. 我國通用型聯合收割機現狀與發展思考[J].中國農機化,2013,34(6):6-8.
[5]吳宗文,譚兵.軍用履帶車輛轉向機構發展綜述[J].機械工程師,2007(5):16-18.
[6]柳濤. 液壓技術在農業機械中的應用研究[J].河南科技,2011(20):56.
[7]Rydberg K E. Hydrostatic Drives in Heavy Mobile Machinery: New concept and Development Trends[R].Swedish:SAE Transactions,1998.
[8]方志強,高連華,王紅巖.履帶車輛轉向性能指標分析及實驗研究[J].裝甲兵工程學院學報,2005,19(4):47-50.
[9]馬彪. 履帶車輛綜合傳動特性的動態仿真研究[D].北京:北京理工大學,1999.
[10]Hong I T,Fitch E C. Hydraulic System Modeling and Simulation-Compendiums and Prospects[C]//Proceeding of the fourth International Symposium on Fluid Power Transmission and Control (ISFP2003),2003:30-137.
[11]Anh Tuan Le. Modeling and control of tracked vehicles[D].Sydney:The University of Sydney,1999.
[12]荊崇波,魏超,李雪原,等.履帶車輛差速轉向機構轉向過程動態特性的試驗方法[J].農業工程學報,2009,25(7):62-66.
[13]曹付義,周志立,賈鴻社.履帶車輛轉向機構的研究現狀及發展趨勢[J].河南科技大學學報:自然科學版,2003,28(2):89-92.
[14]呂海杰,韓宏宇,蘆磊. 雙流傳動履帶車輛轉向運動學模型的建立[J].農機化研究,2008(3):225-227.
[15]孫勇,李文哲.雙流傳動履帶車輛轉向機構的研究現狀及發展趨勢[J].農機化研究,2008(3):235-240.
[16]陳恒峰,郭輝,張學軍,等.淺談靜液壓技術在農業機械中的應用現狀與發展趨勢[J].新疆農機化,2016(2):11-13.
[17]吳元道.工程機械靜液壓傳動裝置[J]. 液壓驅動與密封,2002(4):46-48.
[18]梁榮慶,坎雜,李成松,等.液壓傳動技術在收獲機械中的應用研究[J]. 機床與液壓,2012,40(20):152-156.
[19]Yuan Shi Hua,Hu Ji Bin. The Efficiency of Multi Range Hydro mechanical Stepless Transmission [J]. Jorunal of BIT,1998,3(1):13-21.
[20]金文勝,安國軍,劉喜海,等.靜液壓驅動在農業機械行走裝置上的應用與發展趨勢[J].內蒙古民族大學學報,2001,16(3):252-257.
[21]王意.行走機械液壓驅動技術發展大觀[J].液壓驅動與密封,2000(1):19-28.
[22]錢進.HST性能測試試驗臺的研制[D].南京:南京農業大學,2011.
[23]官忠范.液壓傳動系統[M].北京:機械工業出版社,2002.
[24]Mauck.L.D. Piezoelectric hydraulic pump performance[J].Proceedings of SPIE-International Society for Optical Engineering,2001(5):246-253.
[25]趙立策.履帶車輛動靜液復合轉向系統特性研究[D].北京:北京交通大學,2009.
[26]冷樹泉.JD7700聯合收割機的變速箱[J].糧油加工與食品機械,1979(9):28-31.
[27]高輝松,朱思洪,賀亮,等. 拖拉機動力換擋變速箱和無級變速箱發展現狀與趨勢[J]. 機械傳動,2012,36(8):190-123.
[28]宋華,趙井旭,吳文明,等. 靜液壓傳動技術(HST)在全喂入水稻收割機上的應用[J]. 設計制造,2010,8(2):97-98.
[29]馮江,蔣亦元. 水稻聯合收獲機單邊驅動原地轉向機構的機理與性能試驗[J]. 農業工程學報,2013,29(4):30-35.
[30]林宇鋼,劉麗敏,周益君,等. 4LYWB-33型履帶自走式聯合收割機變速控制系統設計[J]. 農機化研究,2013,35(3):113-116.
[31]計聯岳,張忠興,黃遠達.洋馬聯合收割機變速箱的使用維護與故障排除[J]. 浙江農村機電,2006(1):9-10.
[32]姜曉春. 履帶式聯合收割機差速轉向系統設計與試驗[D].鎮江:江蘇大學,2015.
[33]朱昊,盧澤民,李耀明.履帶式聯合收獲機械差動變速箱的設計與仿真[J].農機化研究,2014,36(1):99-103.
[34]Bodin A. Development of a tracked vehicle to study the influence of vehicle parameter tractive performance in soft terrain[J].Journal of Terramechanics,1999,36(3):167-181.
[35]洋馬農機株式會社.行駛變速裝置的操舵機構:中國,97198081.0[P].1999-10-06.
[36]益陽福祥農業裝備有限公司. 履帶式車輛行走傳動裝置:中國,201510635268.7[P].2016-01-06.
[37]王赟.聯合收割機變速箱工藝革新技術[J].農業與技術,2013,33(8):30.
ID:1003-188X(2018)04-0001-EA
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09
