基于參數估計的下視稀疏陣列三維SAR運動誤差補償和成像處理方法
2018-04-17 08:19:30劉奇勇蘇令華
雷達學報 2018年6期
劉奇勇 張 群 洪 文 蘇令華 梁 佳
①(空軍工程大學研究生院 西安 710077)
②(空軍工程大學信息與導航學院 西安 710077)
③(信息感知技術協同創新中心 西安 710077)
④(復旦大學電磁波信息科學教育部重點實驗室 上海 200433)
⑤(微波成像技術國家重點實驗室 北京 100190)
⑥(中國科學院電子學研究所 北京 100190)
1 引言
3維合成孔徑雷達(3-Dimensional Synthetic Aperture Radar, 3D SAR)成像能夠克服傳統2維SAR成像中存在的陰影和重疊效應[1],獲得場景的3維成像結果[2-4]。與其他的3D SAR成像技術相比,例如:層析SAR成像[5]、干涉SAR成像[6]等,陣列3D SAR成像技術通過單次航過就能得到場景的3維圖像[7-10],而且成像模式更加靈活,尤其是稀疏陣列下視3D SAR(Downward-Looking Sparse Linear Array 3D SAR, DLSLA 3D SAR)成像能夠克服斜視中存在的陰影效應,得到了更加廣泛的關注。
DLSLA 3D SAR系統的線陣長度受限于平臺的尺寸,導致跨航向分辨率比較低,很多文章對提升DLSLA 3D SAR系統的跨航向分辨率進行了研究[11,12]。但是這些文章并未考慮載機飛行不理想的情況,實際情況下,載機的運動是會存在誤差的。為補償運動誤差,文獻[13]提出一種基于波數域的運動補償方法,但是該方法需已知載機的運動參數。文獻[14]提出一種基于多通道聯合自聚焦的方法,該方法利用傳統圖像偏置(map drift)法實現圖像的自聚焦,但是沒有考慮多普勒調頻空變的特點。事實上,DLSLA 3D SAR成像與傳統的SAR成像中的運動誤差補償是存在不同的。傳統SAR一般都是遠距離成像,方位向合成孔徑較長,合成孔徑時間也比較長[15,16]。但是,DLSLA 3D SAR成像中,由于跨航向分辨率與平臺高度成反比,要使其跨航向分辨率在可接受的范圍內,載機平臺的高度就不能太高,合成孔徑長度也就不會太長,合成孔徑時間也會較短。因此,在一個合成孔徑時間內載機一般都可看成是平穩飛行的。
基于以上分析,本文研究載機飛行過程中存在偏航角速度時的DLSLA 3D SAR成像。首先建立載機存在偏航角速度下的DLSLA 3D SAR成像模型;其次,通過理論計算得到多普勒調頻率的顯示表達式,并且多普勒調頻率與散射點被調制后的跨航向坐標有關,而與被調制后的方位向坐標無關;因此,可以先處理跨航向信號,再處理方位向信號;接著,在完成跨航向信號重構后,在平臺運動參數存在誤差的情況下,基于參數化稀疏表征方法實現了平臺的速度和偏航角速度的估計,進一步利用所得到的參數構造方位補償函數完成了方位向信號的處理,實現了運動誤差的補償;隨后提出一種形變校正方法。仿真實驗驗證了所提算法的有效性。
2 DLSLA 3D SAR成像運動誤差建模
DLSLA 3D SAR成像幾何模型如圖1所示。假設飛機以速度v平行于X軸(方位向)飛行,飛行高度為H。稀疏線性陣列布設在機翼下方,沿著Y軸(跨航向)排列,并且關于高度向Z軸(距離向)對稱。陣列結構為兩端的為發射陣元,數量為,間隔為2d,中間的為接收陣元,數量為,間隔為,則通過等效相位中心(Equivalent Phase Center,EPC)原理,可以得到等間隔的均勻EPC,數量為,間隔為d。發射陣元采用時分的工作模式發射信號,則在利用EPC原理時,會引入雙基等效為單基的距離誤差同時不同時刻的EPC不在同一直線上,需要補償運動引入的EPC誤差,經過EPC誤差和運動引起的EPC的誤差補償后,就可以利用EPC直接對信號處理[17]。由于發射陣元為偶數,因此,等效的EPC數量N也為偶數,實際上,在該陣列結構中,陣列的中心沒有EPC,因此,可把該點看成均勻EPC丟失的點,并將其添加到EPC中,并EPC從左至右依次編號,并組成序列向量,而EPC稀疏采樣得到的序列為,每個采樣序號p對應著EPC的序號為,那么對于第p個降采樣的EPC,其在慢時間時刻的坐標可以表示為,其中,為慢時間的全采樣序列。當機載平臺存在偏航角時,載機的實際航線為圖中實線所示,則第p個等效陣元到第k個散射點的實際的瞬時距離如式(1)所示。
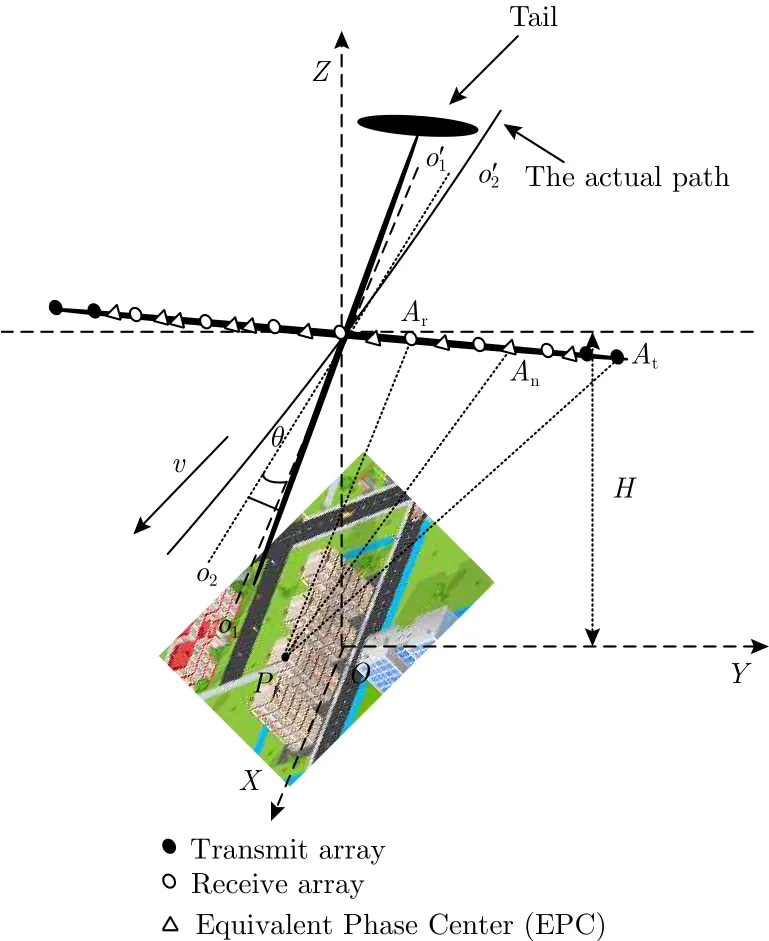
圖1 DLSLA 3D SAR成像幾何模型Fig. 1 DLSLA 3D SAR imaging geometry model

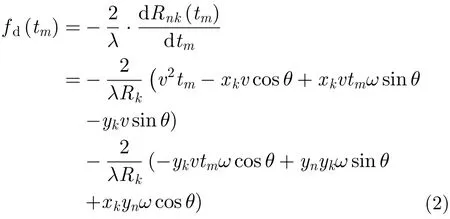
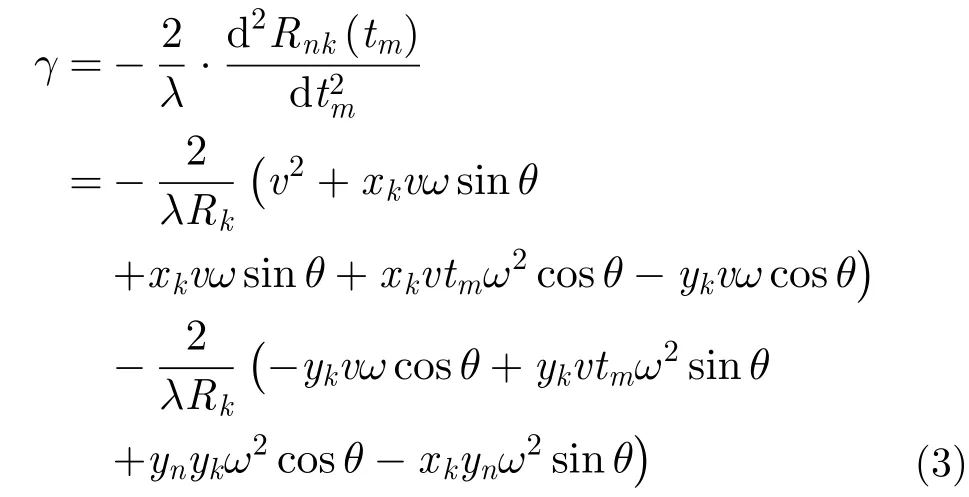
載機在運動過程中,偏航角變化呈正弦形式,而且,最大偏航角一般不會太大,會被控制在一定范圍內。在該條件下,載機的偏航角變化可以近似成線性變化。基于此近似,假設偏航角速度為,初始偏航角為,則瞬時偏航角為。根據瞬時距離的表達式,可得瞬時多普勒

由式(7)-式(10)可知,第l個散射點在方位維-跨航向維平面聚焦后的位置為,而不是,即散射點(的方位向坐)標和跨航向坐標被調制了。且。則信號完成距離壓縮后,第i個距離單元對應的方位向-跨航向2維信號可表示為
3 基于參數化稀疏表征的平臺參數估計方法
完成距離壓縮和跨航向信號重構后,位于第i個距離單元、第l個跨航向單元的方位向信號可表示為
根據式(13),方位向稀疏字典可構造為



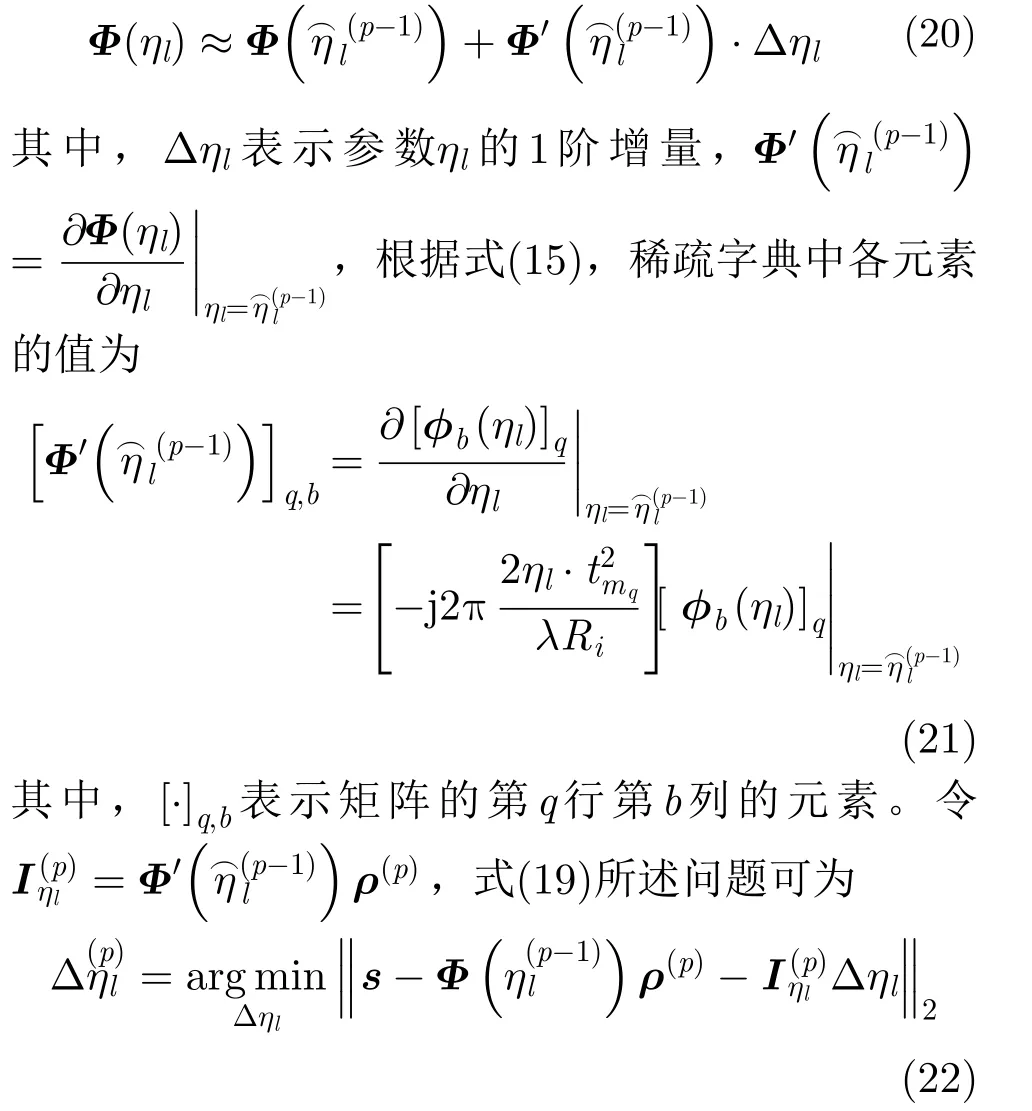
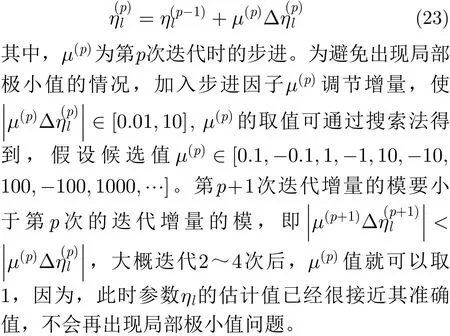
式(22)可利用最小二乘法求解,進而,參數可以利用式(23)進行更新。
4 形變校正
由于聚焦后的3維圖像在方位向-跨航向平面存在形變,因此,需對各個高度維的方位向和跨航向平面進行形變校正。
首先,根據方位向處理之前的信號,可得第k個散射點的回波起始時間或者回波終止時間。


根據式(9)、式(10)和式(26),可計算出散射點的準確坐標,并且估計出初始偏航角的值。在完成形變校正之后,就能得到準確的3維場景圖像。
本文所提算法的完整流程圖如圖2所示。
5 仿真實驗和分析
本節利用仿真數據和DEM數據來驗證本文所提方法的有效性。
5.1 DLSLA 3D SAR成像孤立點目標實驗
首先進行孤立點目標仿真實驗。點目標模型如圖3所示,所有點目標的反射系數均設為1。當載機的飛行速度為60 m/s,所得到的陣列尺寸為4.3 m×1.0 m(陣列方向×方位向),為保證方位向信號不出現模糊,脈沖重復頻率至少為120 Hz;由于DLSLA 3D SAR成像系統采用MIMO時分工作方式,因此,跨航向信號需要16個脈沖周期才能得到一個全孔徑的EPC,則系統的脈沖重復頻率至少為1920 Hz。為了在較短的合成孔徑時間內采樣足夠的信號,系統的脈沖重復頻率設為5000 Hz。實驗仿真參數如表1所示,EPC之間的間隔設為半個波長,載機平臺存在偏航角運動誤差。
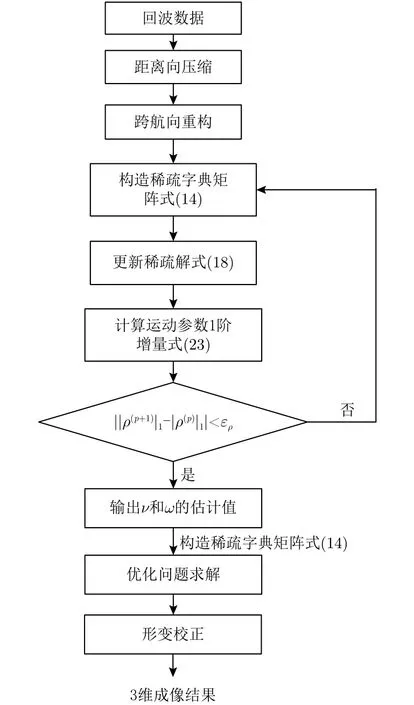
圖2 所提方法流程圖Fig. 2 The flow chart of the proposed method
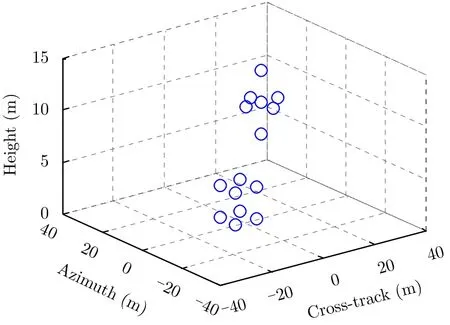
圖3 3維孤立點目標模型Fig. 3 3D isolated targets model
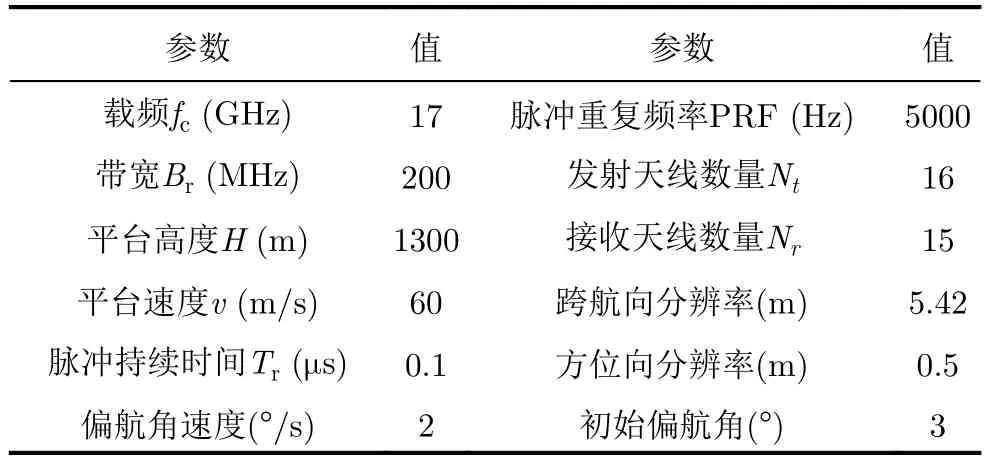
表1 平臺和天線的參數Tab. 1 Parameters of platform and antenna
仿真實驗中,假設平臺自身的速度和偏航角速度估計值的誤差分別為2 m/s和2°/s,并且在距離壓縮后的信號中加入噪聲,使得到的信號的信噪比為5 dB,跨航向利用波束形成原理對信號進行壓縮。方位向的降采樣率為0.8,圖4(a)為直接構造稀疏字典矩陣對信號進行重構后得到的3維成像結果,此處稱為直接成像方法,可見,方位向仍然存在展寬現象,方位向信號采用迭代閾值法進行重構。這是因為平臺的運動參數值不準確,導致所構造的方位向稀疏字典矩陣與理想的稀疏字典矩陣不完全匹配。進一步,利用所提出的參數化稀疏表征方法估計平臺的運動參數,得到平臺的速度和偏航角速度的估計結果分別為60.08 m/s和2.09°/s,再根據得到的運動參數構造方位向稀疏字典矩陣對信號進行處理,成像結果如圖4(b)所示,可見,方位向聚焦效果良好。這說明所提的參數化稀疏表征方法能夠準確估計平臺的運動參數,并完成方位向信號處理,實現平臺運動誤差的補償。
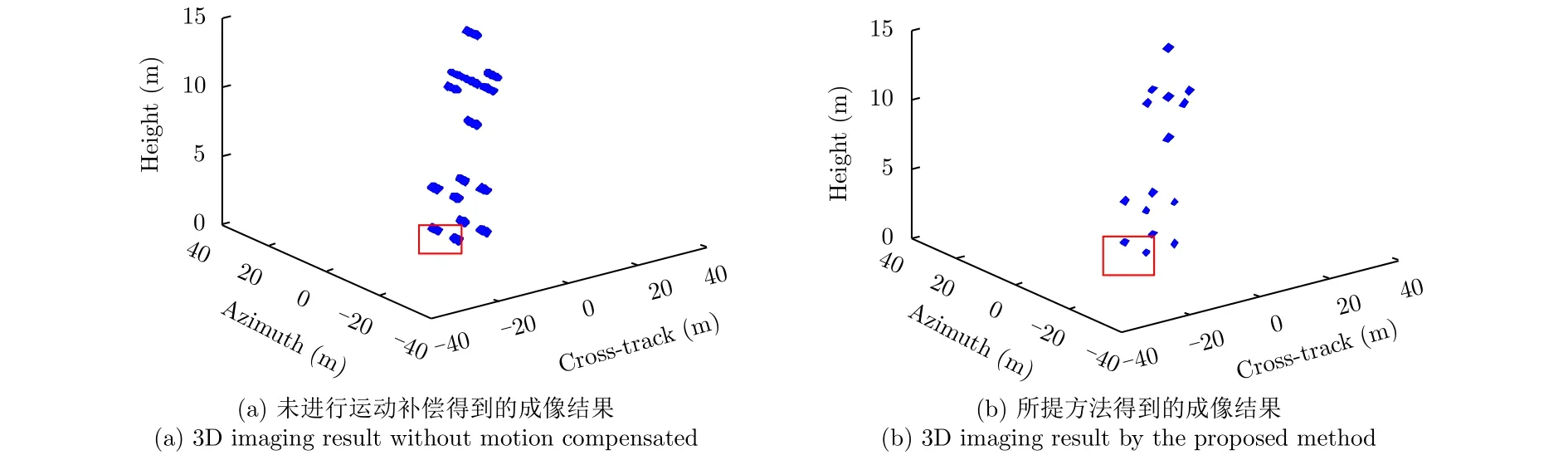
圖4 成像結果Fig. 4 Imaging result
圖5 為圖4(a)和圖4(b)紅色矩形區域內兩個目標的方位向截面圖,圖5中紅色線條代表圖4(b)對應的方位向截面圖,藍色線條代表圖4(a)對應的方位向截面圖,可見,基于參數化稀疏表征的方法能夠實現方位向的壓縮,而直接法由于采用的平臺運動參數不準,導致構造的稀疏字典與信號不匹配,因此存在一定的展寬現象。表2為圖5中兩種方法對應的3 dB寬度。其中提升倍數的定義為:直接法的3 dB寬度/參數化稀疏表征法的3 dB寬度。可見,所提方法的聚焦效果有明顯的改善。
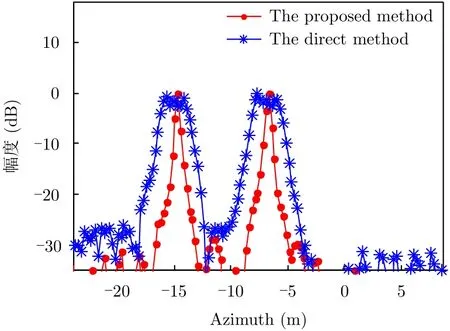
圖5 方位向截面圖Fig. 5 The azimuth sectional image
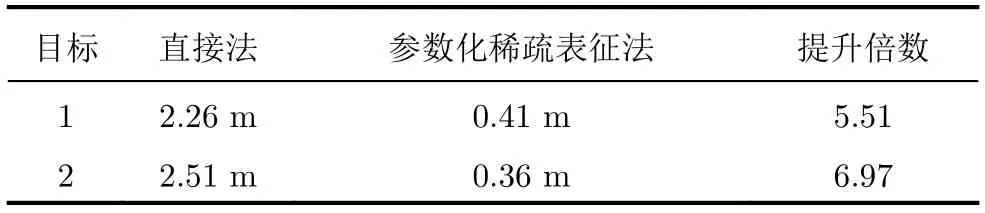
表2 圖5中兩種結果對應3 dB寬度Tab. 2 The 3 dB width of the two methods in Fig. 5
因此,接下來分析圖像的形變校正問題。圖6(a)為圖4(b)在方位向-跨航向平面上的投影結果,可見,聚焦所得散射點坐標的方位向坐標和跨航向坐標與其真實值確實存在偏差,而且矩形區域內目標坐標的偏差比橢圓形區域內的目標坐標的偏差更加嚴重。這可從方位向坐標和跨航向坐標被調制的公式看出,當目標的真實坐標越大時,坐標受到調制的影響也越嚴重。圖6(b)為經過形變校正之后的結果,通過將圖6(b)與圖6(a)進行對比可以發現,校正后目標所在的位置與其真實值非常接近,而且不同區域的圖像所發生的形變都能夠得到準確的校正。即所提形變校正方法是有效的,利用所提方法能夠校正圖像所產生的形變。并且,根據形變校正方法得到的初始偏航角為2.92°。
進一步,得到圖6(b)中所示的5個目標形變校正前后的坐標,如表3所示,表明所提形變校正方法是有效的,利用本形變校正方法對圖像進行處理能夠明顯改善圖像性能。
5.2 DLSLA 3D SAR成像分布式目標仿真
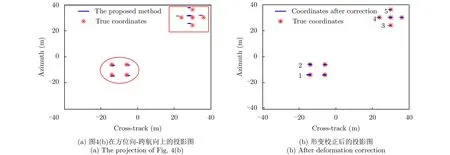
圖6 方位向-跨航向平面投影圖Fig. 6 2D projection onto azimuth and cross-track plane

表3 形變校正前后的方位向、跨航向坐標Tab. 3 The azimuth and cross-track coordinates before and after deformation correction
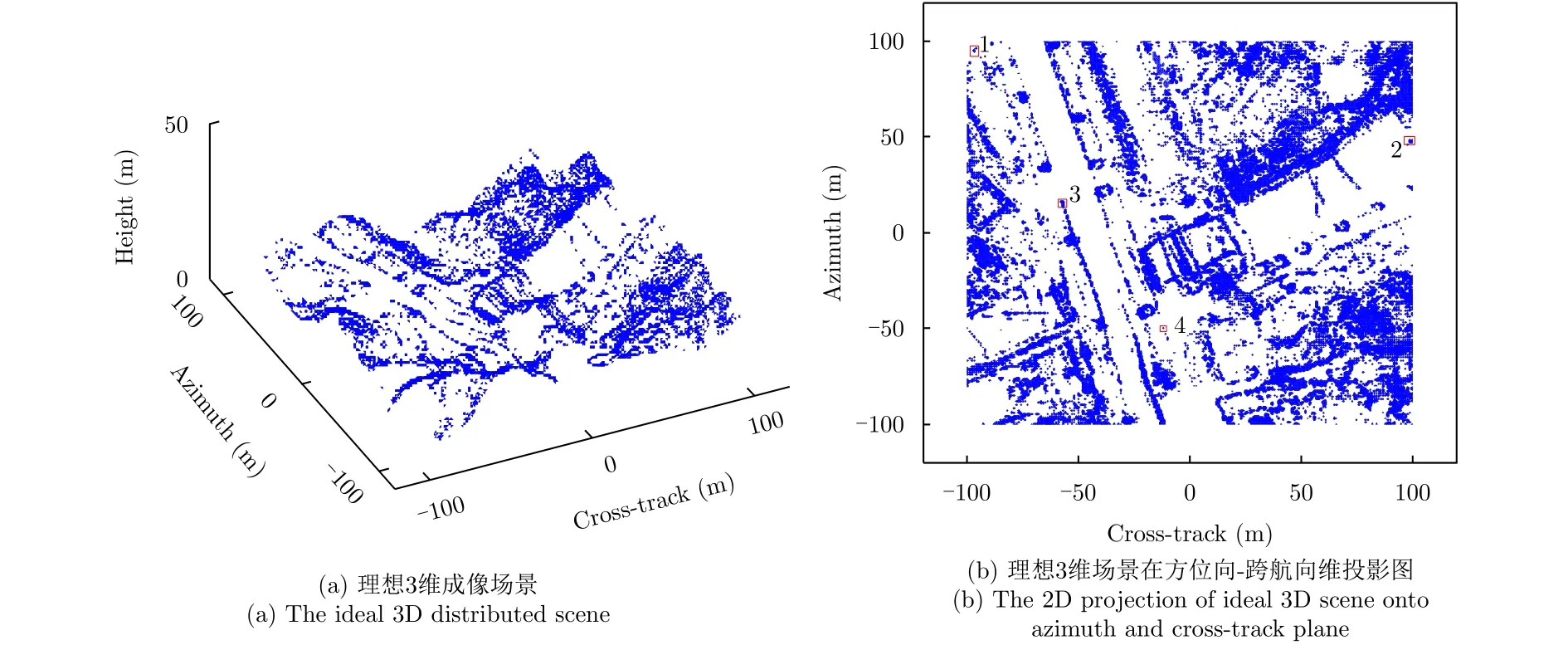
圖7 成像場景示意圖Fig. 7 The ideal scene
在本節仿真實驗中,分布式場景及其在方位向-跨航向平面上的投影圖分別如圖7(a)和圖7(b)所示。仿真參數如表1所示,在笛卡爾坐標系中,仿真場景的大小為200 m×200 m×35 m。散射點的方位向坐標均勻分布在[-100 m, 100 m],間隔為1 m。散射點的跨航向坐標均勻分布在[-100 m, 100 m],間隔也為1 m。根據系統參數,可算出跨航向的瑞利分辨率為5.42 m。為了評價所提算法的抗噪性能,在距離壓縮后的信號中加入噪聲,使信號的信噪比為5 dB,跨航向利用波束形成原理對信號進行壓縮。在進行仿真時,方位向重構時的降采樣率設為0.8。假設平臺自身的速度和偏航角速度估計值的誤差分別為2 m/s和2°/s,方位向信號采用迭代閾值法進行重構,由本節所提方法得到的場景3維成像結果如圖8(a)所示,圖8(b)為未進行運動誤差補償得到3維成像結果。從圖8(b)可以看出,未進行運動誤差補償的成像結果中存在一些細節丟失的現象,而所提的方法能夠得到完全聚焦的3維圖像,平臺的速度和偏航角速度的估計值分別為59.91 m/s和2.06°/s。進一步,得到圖8(a)和8(b)在方位向-跨航向2維平面上的投影結果,分別如圖9(a)和9(b)所示。從圖8可見,兩種方法得到圖像在方位維-跨航向維平面都發生了形變,而且圖9(b)還存在展寬現象。最后,根據所提形變校正方法,圖9(a)經過形變校正后得到的結果如圖10所示,可見,圖像的形變得到了校正,并且偏航角的初始值的估計值為3.06°。即本文所提方法對分布式場景也是有效的。

圖8 分布式場景DLSLA 3D SAR成像結果Fig. 8 3D imaging result of scene

圖9 方位向-跨航向平面投影圖Fig. 9 2D projection onto azimuth and cross-track plane
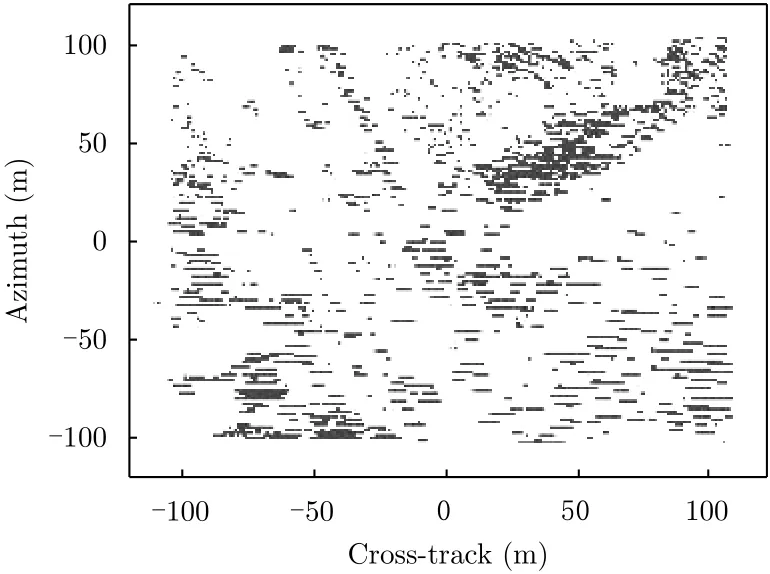
圖10 形變校正后的方位向-跨航向平面投影圖Fig. 10 2D projection onto azimuth and cross-track plane after deformation correction.
進一步,為評價形變校正方法對分布式場景的校正性能,得到了理想場景圖7(b)中標示出的4個目標形變校正前后的方位向、跨航向坐標,如表4所示。提升倍數的定義為:|實際坐標值-校正前的坐標值|/|實際坐標值-校正后的坐標值|。可見,形變校正后的坐標相比校正前的坐標得到了很大的改善。即本形變校正方法對分布式場景也有效。
6 結論
DLSLA 3D SAR成像在載機存在偏航角速度的情況下會對成像產生影響。當載機存在偏航角速度時,信號多普勒調頻不僅與平臺的速度和偏航角速度有關,還與被調制后的跨航向坐標有關,而與被調制后的方位向坐標無關。因此可以先處理跨航向信號得到目標被調制后的跨航向坐標,再處理方位向信號。本文所提基于參數化稀疏表征的方法能夠實現平臺速度和偏航角速度的估計,并完成方位向信號重構,所提的形變校正方法能夠校正圖像的形變。仿真結果驗證了本文所提方法的有效性。

表4 形變校正前后的方位向、跨航向坐標Tab. 4 The azimuth and cross-track coordinates before and after deformation correction
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國生殖健康(2019年3期)2019-02-01 06:12:26
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56