區間測速與自動提醒系統在邢衡高速中的應用
2018-04-19 01:35:18河北省高速公路邢衡籌建處陳翔
中國公路 2018年6期
文/河北省高速公路邢衡籌建處 陳翔
區間測速與自動提醒技術的優點
區間測速即利用車輛經過兩個抓拍點的時間,計算區間內車輛行駛的平均速度,來檢測超速違法車輛。自動提醒即通過自動聯動可變信息標志設備來提醒、警示駕駛員及時糾正錯誤避免事故發生。近年來,區間測速已越來越多地被實際應用,自動提醒功能是智能化監控的一個體現,它的優勢與特點主要表現在以下幾個方面:
測量的范圍加大,全程無盲點測速。與定點測速相比,由于區間測速計算的是區間內的平均速度,測量范圍更大,能夠實現抓拍、全程無盲點超速檢測。
測速精度高,穩定可靠。定點測速受車輛、氣候和元器件漂移等影響,導致系統長時間穩定性差。而區間測速,利用兩個檢測斷面之間的距離,并通過激光測量標定,距離誤差幾乎為零;測算時間為兩個抓拍點的時間差,只需保證抓拍點設備的時間同步即可,因此,測量的準確性更高,系統長時間穩定性為優。
“反監控”能力強,監控效果提升。通過電子地圖等高科技設備,駕駛員會在單點測速或監控點周邊地段剎車減速,經過監控點后繼續超速行駛,這類具有反監控能力的違法超速車,在區間測速系統監控下將無所遁形。
另外,剎車減速規避監控,很容易造成追尾事故。采用區間測速后,可間接地減少交通事故的發生。
說服力強,更容易被理解和接受。區間測速系統測速原理簡單,精準度高,更容易被駕駛人接受,爭議性較小。
測速效率高。傳統超速抓拍設備取證系統中,如果出現多輛車將無法采集圖像數據。區間測速提供的是兩個抓拍點針對同一車輛的抓拍圖像,與其他車輛是否出現無關,一定程度上提高了檢測效率。
信息反饋及時,實用性強。區間超速自動提醒功能,自動與道路上的可變信息標志聯動,及時提醒超速車輛糾正違法行為,警示其他駕駛人注意控制車速。另外,系統還具有語音提醒監控人員記錄違章車輛信息、黑名單報警等功能,從而減輕了監控人員的工作負擔。總體來說,實用效果顯著,也提升了監控管理中心的監管力度和服務水平。
提高設備資源利用率。自動提醒功能利用現有的設備資源和綜合監控平臺系統的SOA架構特點,在發布提醒信息時,插播一條信息后,將自動恢復,完全不影響原來的播放內容。
系統的實現與應用
系統構成
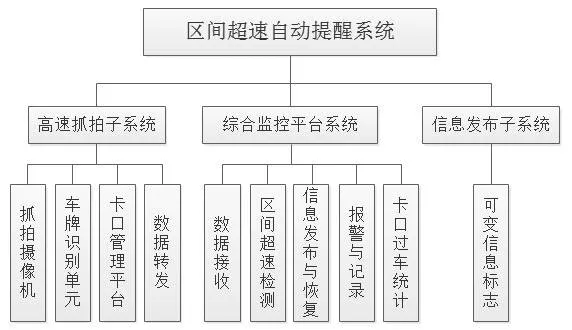
圖1 系統構成圖
通過全程信息化綜合監控平臺系統(軟件處理模塊,如圖1所示)將高速抓拍子系統與信息發布子系統有機結合,實現聯動控制。系統的主要組成包括:
硬件組成:海康威視DS-2CD9131-S高速抓拍攝像機,深圳同鑫TXCMS-DC32-A22超節能門架式可變信息標志;
軟件組成:海康IVMSIVMS智能交通管控平臺,基于WebService的數據轉發/接收模塊,可變情報板CMS通訊服務軟件,基于SOA架構的綜合監控平臺系統,Oracle_v3.2.3數據庫,MS SQL Server 2008 R2數據庫。
邢衡高速公路(衡水段)項目全線架設22套高速抓拍攝像機(含攝像機和車牌識別單元),平均每6.6公里1套。每套高速抓拍攝像機,配置一套頻閃補光燈,均安裝在道路門架式可變信息標志上方(如圖2所示)。
綜合監控平臺是結合該項目的特點進行研究定制的監控系統,集成了路段上所有機電設備和子系統功能,其中,包括區間測速與自動提醒技術(如圖3所示)。

圖2 外場設備
圖3 綜合監控平臺系統界面
實現原理及流程
視頻檢測原理。視頻檢測是采用基于運動檢測的車輛檢測方法,其核心原理為自學習建立道路背景模型,將當前幀圖像與背景模型差分后,得到運動前景像素點,這些運動前景像素得到車輛信息。該方法的優劣依賴于背景建模算法的性能。
整個檢測過程分為以下幾個步驟:
由高清攝像抓拍主機,獲取實時的視頻流。
利用背景差分算法檢測運動前景。首先通過初始多幀視頻圖像的自學習建立背景模型,然后差分運算當前幀圖像與背景模型,消除背景影響,從而獲取運動目標的前景區域;
根據背景差分運算中運動目標檢測的結果,有選擇性地更新背景模型并保存。
過濾噪聲并獲取準確的車輛位置。
運用時空信息、匹配和預測等算法,準確跟蹤車輛,得到車輛對象的運動軌跡并保存。
判斷車輛是否到達觸發線位置,如是沒有到達,則進行下一幀檢測,如果到達則發出觸發信號。
車輛的抓拍觸發綜合運用了車牌檢測算法和車輛檢測算法:首先采用車牌檢測算法,當車輛到達觸發線時,若系統檢測到圖像中存在車牌,則觸發抓拍,并進行車牌識別;若系統無法檢測到車牌,將啟用車輛檢測算法,若運動對象與系統內建立的車輛模型相匹配,則觸發抓拍,并記錄為無牌車輛(如圖4所示)。
區間測速原理。設檢測區間起始點為A和結束點為B,根據樁號預先計算AB間的區間距離,由A、B兩點的抓拍及識別系統,檢測、識別過往車輛,并將通過兩點的時間、識別結果及全景圖片發回監控平臺,計算同一車輛由A點到B點的時間差,用距離除以時間獲得車輛的平均速度(如圖5所示)。
自動提醒功能。當系統檢測到超速違法行為時,預估車輛到達下一個信息發布設備的時間,并自動向該信息發布設備插入臨時任務,提醒該車輛已被檢測到超速行駛,及時糾正,警示其他車輛注意控制車速,并將信息發布設備自動恢復至原始狀態。功能實現難點包括對大量過車數據的管理、分析、計算、統計和對信息發布設備的精確控制。
實際測試中,過往的車輛數量非常龐大,為了提高效率,將數據分為歷史過車數據和當日過車數據,并分別統計查詢。
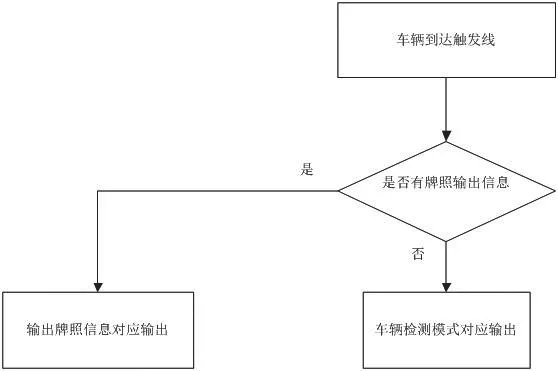
圖4 車輛抓拍觸發原理示意圖

圖5 區間測速原理圖
由于區間測速須計算分析每條數據,但超速車輛的出現又較為偶然,頻繁查詢數據庫會影響系統的工作效率,甚至影響其他功能模塊。因此,在軟件中采用臨時數據能較好地解決此問題。另外,考慮到漏拍的可能性,在排除無效數據的同時,還應及時清理已過時的數據,保證數據的及時更新。
提醒信息下發預估時間,由下一區間的距離除以當前區間的平均速度計算得出。提醒信息下發時,應先保存信息發布設備的當前狀態,制定臨時插播任務,待提醒信息到達終止時間時,恢復設備至原來狀態。
顯示狀態下,超速車輛并不會大量集中出現,預估時間也不可能完全準確無誤,所以保守采用30s的提醒持續時間,若期間有新的超速違章發生,則用新的提醒信息代替并更新定時器。
系統實現流程。整個實現流程可分為以下幾個步驟(如圖6所示):
對路段上的所有高清卡口抓拍點進行編號,區分左右線;
實時抓拍提取過往車輛信息,并將實時數據通過以太網上傳至卡口管理平臺和綜合監控平臺;

圖6 區間測速與自動提醒流程圖
綜合監控平臺每接收一條數據,統計實時過往車輛流量,并通過數據庫查詢分析計算該車輛是否超速違法;
若已超速違法,則計算預計到達下一個信息發布設備的時間,并制定可變情報板定時任務發布,提醒違法車輛;
超速提醒信息下發持續一定時間后(30s至60s),自動將信息發布設備恢復至常態運行狀態;
將超速車輛信息(抓拍圖片、車牌號、過車時間、區間位置名稱、區間速度、超速百分比、車型、車身顏色等)存入違章車輛查詢表,對比黑名單,并分析統計。
系統可靠性要求
為使系統的判別、計算、命令下發更加準確、可靠,必須注意以下幾點:
車牌識別率的保證。為使區間測速達到最大的效用,對通過該區間的車輛,在號牌完整、清晰、安裝規范,且無遮擋、無污損的情況下,號牌識別準確率越高,區間內的有效測速越高。
系統時間同步的保證。測量區間平均速度的準確性在于過車時間的準確性,因此,整個系統運行時間的同步是保證系統準確性、可靠性的關鍵。
系統通訊的保證。各個采集點的數據傳輸必須依靠網絡,所以設備通訊的穩定可靠是保證系統正常運轉必不可少的條件。
結語
通過將全程區間測速與自動提醒技術在邢衡高速(衡水段)的實施應用,得出該技術能夠對高速公路超速違法車輛起到良好的提醒警示作用,同時也減輕了監控負擔,具有較好的應用價值。通過實際測試驗證了該技術的及時性和有效性。但在超速車輛大量集中出現時,自動提醒信息會長時間占用信息發布設備,考慮到這種可能性很小,本文暫且忽略此種情況,今后將通過優先級的控制加以改進,尤其在應急事件發生時,應暫停自動提醒功能。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
電子制作(2018年11期)2018-08-04 03:26:08
中華手工(2017年2期)2017-06-06 23:00:31
海峽科技與產業(2016年3期)2016-05-17 04:32:12
工業設計(2016年12期)2016-04-16 02:52:00
中外會展(2014年4期)2014-11-27 07:46:46
消費者報道(2014年7期)2014-07-31 11:23:57
