基于稀疏樣本選優(yōu)的機(jī)載雷達(dá)動目標(biāo)檢測算法
2018-04-26 07:30:04龔清勇王成燕
系統(tǒng)工程與電子技術(shù) 2018年5期
關(guān)鍵詞:檢測
龔清勇, 王成燕
(南京郵電大學(xué)通信與信息工程學(xué)院,江蘇 南京 210003)
0 引 言
空時自適應(yīng)處理(space-time adaptive processing,STAP)是機(jī)載雷達(dá)在強(qiáng)雜波環(huán)境中進(jìn)行動目標(biāo)檢測的有效技術(shù)[1-4]。STAP的性能依賴于雜波協(xié)方差矩陣的構(gòu)建精度。依據(jù)RMB準(zhǔn)則[1],當(dāng)用來估計雜波協(xié)方差矩陣的訓(xùn)練樣本充足、滿足獨(dú)立同分布(independent and identically distributed,IID)時才不會影響動目標(biāo)的檢測性能。然而,機(jī)載雷達(dá)實(shí)際工作在非均勻環(huán)境中,上述條件很難滿足。當(dāng)訓(xùn)練樣本中存在干擾目標(biāo)時會引起信號相消,造成漏警,降低對動目標(biāo)的檢測性能。針對此問題,學(xué)者們提出利用非均勻檢測器(nonhomogeneous detector,NHD)[5]來檢測訓(xùn)練樣本中是否含有干擾目標(biāo),對含有干擾目標(biāo)的訓(xùn)練樣本加以剔除。比較典型的NHD有:廣義內(nèi)積(generalized inner project,GIP)及其改進(jìn)的算法、自適應(yīng)功率剩余(adaptive power residual,APR)及其改進(jìn)的算法等。
隨著稀疏恢復(fù)和壓縮感知技術(shù)的發(fā)展,基于稀疏空時譜恢復(fù)的STAP算法(STAP algorithm based on sparse recovery,SR-STAP)[6-9]成為近幾年研究的熱點(diǎn)。由于雜波譜在角度-多普勒頻域具有稀疏性,利用稀疏恢復(fù)技術(shù)來估計高分辨率的空時二維雜波譜。比較典型的SR-STAP有:聯(lián)合稀疏功率譜恢復(fù)的STAP算法[10]及其改進(jìn)的算法[11]、直接數(shù)據(jù)域SR-STAP及其改進(jìn)的算法[6]等。這些算法能夠利用稀疏恢復(fù)技術(shù)對訓(xùn)練樣本數(shù)據(jù)以及待檢測距離單元的數(shù)據(jù)進(jìn)行重構(gòu)。為了提高對待檢測單元雜波協(xié)方差矩陣的估計精度,文獻(xiàn)[12]提出一種訓(xùn)練樣本選優(yōu)SR-STAP算法,選擇與待檢測距離單元的數(shù)據(jù)較相似的訓(xùn)練樣本參與雜波協(xié)方差矩陣估計,從而利用較少的訓(xùn)練樣本得到精度較高的雜波協(xié)方差矩陣,但該算法只適合均勻樣本,當(dāng)訓(xùn)練樣本中存在干擾目標(biāo)時會造成信號相消,影響動目標(biāo)的檢測性能。為了克服訓(xùn)練樣本中的干擾目標(biāo),文獻(xiàn)[10]提出基于聯(lián)合稀疏功率譜恢復(fù)的STAP算法(STAP algorithm based on joint sparse recovery,JSR-STAP),利用訓(xùn)練樣本中雜波與干擾目標(biāo)稀疏恢復(fù)系數(shù)的不相關(guān)性,去除訓(xùn)練樣本中的干擾目標(biāo),從而達(dá)到抑制干擾目標(biāo)的目的,但是該算法在構(gòu)建雜波協(xié)方差矩陣時沒有加入待檢測距離單元的數(shù)據(jù)也沒有對訓(xùn)練樣本進(jìn)行選優(yōu),使得構(gòu)建的雜波協(xié)方差矩陣精度下降,進(jìn)而影響動目標(biāo)的檢測性能。
為了提高動目標(biāo)的檢測性能,本文提出一種基于稀疏樣本選優(yōu)的機(jī)載雷達(dá)動目標(biāo)檢測算法,該算法先對訓(xùn)練樣本進(jìn)行選優(yōu),再利用l2范數(shù)選擇合適的稀疏恢復(fù)幅值,去除選優(yōu)后訓(xùn)練樣本和待檢測距離單元中與雜波不相關(guān)的數(shù)據(jù)[10]。仿真驗(yàn)證了本文算法能夠提高動目標(biāo)的檢測性能。
1 信號模型

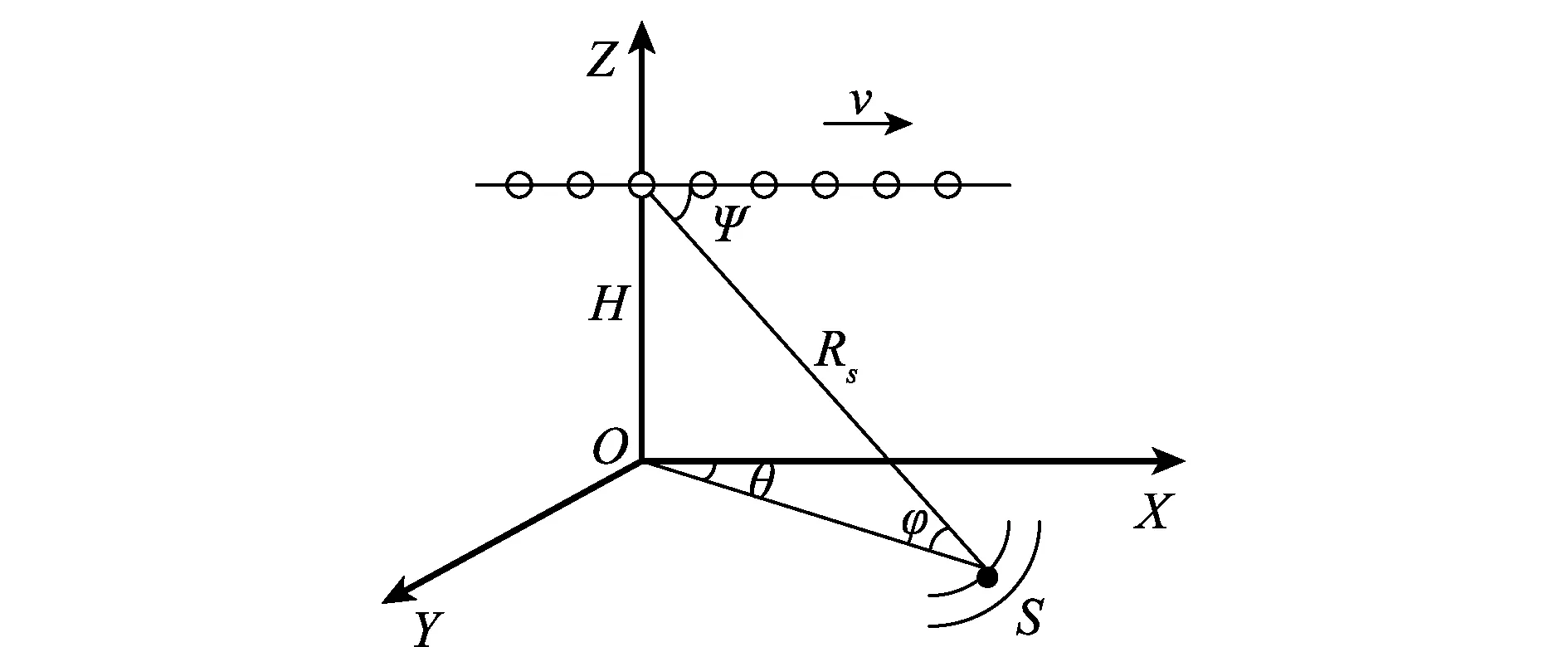
圖1 正側(cè)視陣機(jī)載雷達(dá)幾何模型Fig.1 Side looking array airborne radar geometric
由幾何模型可知,第l個距離單元接收到的雜波加噪聲信號[4]為
(1)
式中
Si(fdi,fsi)=Ssi(fsi)?Sti(fdi)
(2)
Ssi(fsi)=[1,exp(j2πfsi),…,exp(j2π(N-1)fsi)]T
(3)
(4)
(5)
(6)
式中,Nc為第l個距離環(huán)中雜波散射源的數(shù)量;σi為第l個距離環(huán)中第i個雜波散射源的幅度;nl為第l個距離環(huán)的噪聲;Si(fdi,fsi)為第l個距離環(huán)中第i個雜波散射源的空時導(dǎo)向矢量;Ssi(fsi)為第l個距離環(huán)中第i個雜波散射源的空域?qū)蚴噶?Sti(fdi)為第l個距離環(huán)中第i個雜波散射源的時域?qū)蚴噶??為Kronecker積;fdi/fr為第i個雜波散射源的歸一化多普勒頻率;fsi為第i個雜波散射源的空間頻率。
2 基于稀疏的STAP算法
2.1 稀疏性分析
(7)
因此,雜波主要分布在由式(7)決定的雜波脊線上[13-15]。
將雜波所在的角度-多普勒頻域進(jìn)行離散化,空間角度域離散化程度為ρs(ρs?1),多普勒域離散化程度為ρd(ρd?1),即空間角度域劃分為Ns=ρsN個離散點(diǎn),多普勒域劃分為Kd=ρdK個離散點(diǎn),則第l個距離單元接收到的雜波加噪聲信號可表示為
(8)
式中,σl為NsKd×1維(NsKd?NK)第l個距離單元空時平面內(nèi)的幅度。由上面分析知雜波主要分布在式(7)決定的雜波脊線上,因此σl是個稀疏向量。稀疏向量中非零的值對應(yīng)顯著分量(稀疏向量中除顯著分量外,其他分量很小可以記為0),顯著分量的個數(shù)等于稀疏度。稀疏度的選取方法[6]如下:
獲得離散化后雜波脊線沿空間角度軸占據(jù)的格子數(shù)為

(9)

獲得離散化后雜波脊線沿多普勒軸占據(jù)的格子數(shù):
(10)
理論上,稀疏度的取值范圍為

(11)
當(dāng)ρs?1,ρd?1時,可以采用式(12)來估計稀疏度。

(12)
Φ是NK×NsKd維由空時導(dǎo)向矢量構(gòu)成的冗余基矩陣,假設(shè)ΦnsKd+kd+1為Φ中第nsKd+kd+1列,則滿足[16]
ΦnsKd+kd+1=
(13)
式中,ns=0,1,…,Ns-1;kd=0,1,…,Kd-1;Δωs為離散化后空時平面最小空域角頻率間隔;Δωt為離散化后空時平面最小時域角頻率間隔。
2.2 稀疏恢復(fù)
由第2.1節(jié)分析可知,σl具有稀疏性,可以依據(jù)稀疏恢復(fù)理論[17-20]求得
s.t.‖xl-Φσl‖2≤ε
(14)
式中,‖·‖p為lp范數(shù);ε為稀疏恢復(fù)的誤差容限(取值與噪聲功率有關(guān))[6,16]。
由于l0范數(shù)最小化優(yōu)化問題計算量巨大,研究已證明,當(dāng)σl足夠稀疏時可以用l1范數(shù)代替l0范數(shù)[21],則式(14)可以表示為
s.t. ‖xl-Φσl‖2≤ε
(15)

2.3 基于稀疏雜波協(xié)方差矩陣的構(gòu)建
由文獻(xiàn)[12]可知,第l個距離環(huán)的雜波協(xié)方差矩陣可以表示為
(16)
式中
(17)
為了精確地估計雜波協(xié)方差矩陣,通常選擇多個距離單元的訓(xùn)練樣本,估計的雜波協(xié)方差矩陣可表示為
(18)
式中,L為參與構(gòu)建雜波協(xié)方差矩陣的樣本總數(shù)。
3 基于稀疏樣本選優(yōu)動目標(biāo)檢測
本文根據(jù)JSR-STAP算法和基于訓(xùn)練樣本選優(yōu)的SR-STAP算法,提出一種基于稀疏樣本選優(yōu)的機(jī)載雷達(dá)動目標(biāo)檢測算法。本文提出的算法與JSR-STAP算法相比,一方面能夠?qū)χ貥?gòu)的訓(xùn)練樣本進(jìn)行選優(yōu),另一方面在構(gòu)建雜波協(xié)方差矩陣時加入待檢測距離單元的數(shù)據(jù)(準(zhǔn)備兩份待檢測距離單元的數(shù)據(jù),一份采用JSR-STAP算法去除待檢測距離單元中的目標(biāo)信號,用來參與雜波協(xié)方差矩陣的構(gòu)建;另一份不做處理用來進(jìn)行動目標(biāo)的檢測),提高了構(gòu)建雜波協(xié)方差矩陣的精度,從而提高機(jī)載雷達(dá)動目標(biāo)的檢測性能;與基于訓(xùn)練樣本選優(yōu)的SR-STAP算法相比,能夠利用l2范數(shù)選擇合適的稀疏恢復(fù)幅值,去除選優(yōu)后訓(xùn)練樣本和待檢測距離單元中與雜波不相關(guān)的數(shù)據(jù),消除干擾目標(biāo)對動目標(biāo)檢測性能的影響,從而提高機(jī)載雷達(dá)的動目標(biāo)檢測性能。算法實(shí)現(xiàn)步驟如下:
步驟2分別計算L-1個訓(xùn)練樣本與待檢測距離單元樣本中顯著分量具有相同位置的幅值的數(shù)量,標(biāo)記為Nl,其中l(wèi)=1,2,…,L-1。
步驟3對Nl按照降序進(jìn)行排列。

步驟5為了使M-1個訓(xùn)練樣本和待檢測距離單元之間的稀疏約束相互增強(qiáng),對矩陣Ap按行求l2范數(shù),即
(19)
將式(19)所得的列向量按元素值由大到小的順序記錄元素的位置,并構(gòu)成位置集合Γ。
(20)
式中
(21)
(22)
(23)
步驟7如果滿足Δm(i)<ε或者i=NsKd,進(jìn)入步驟8,否則令i=i+1,返回到步驟6。
步驟8構(gòu)建第m個距離單元的雜波協(xié)方差矩陣為
(24)
由式(24)可得M個距離單元聯(lián)合處理后的雜波協(xié)方差矩陣可表示為
(25)
使用式(25)構(gòu)建的雜波協(xié)方差矩陣進(jìn)行STAP處理,可以達(dá)到穩(wěn)健的動目標(biāo)檢測性能。
4 仿真實(shí)驗(yàn)
仿真場景為具有均勻線性陣列的正側(cè)視機(jī)載相控陣?yán)走_(dá)系統(tǒng)。陣元數(shù)N=10,脈沖數(shù)K=10,雷達(dá)工作波長λ=0.25 m,載機(jī)飛行的速度v=150 m/s,載機(jī)飛行的高度H=6×103m,陣元間距d=0.5λ,脈沖重復(fù)頻率fr=2v/d,采樣距離環(huán)間距ΔR=49 m,待檢測距離單元(第81個距離單元)兩側(cè)分別取80個距離單元作為訓(xùn)練樣本(即L-1=160),雜噪比為50 dB,選優(yōu)后樣本數(shù)M=71。第40、60、125、165個距離單元分別在方位角30°,fd/fr=0.125處加一個干擾目標(biāo),其信雜噪比(signal-to-clutter-noise ratio,SCNR)分別為-25 dB 、-10 dB 、0 dB 、-15 dB。圖2給出了改善因子對比圖,圖3為距離單元輸出功率,圖4和圖5為利用基于圖像特征空時處理的地面動目標(biāo)檢測(image feature-based space-time processing,IFSTP)算法[27-28]進(jìn)行的目標(biāo)信號提取對比圖。圖中仿真都是100次獨(dú)立實(shí)驗(yàn)的平均值。
在待檢測距離單元加入一個位于方位角30°,fd/fr=0.125的運(yùn)動目標(biāo)。改善因子對比如圖2所示。
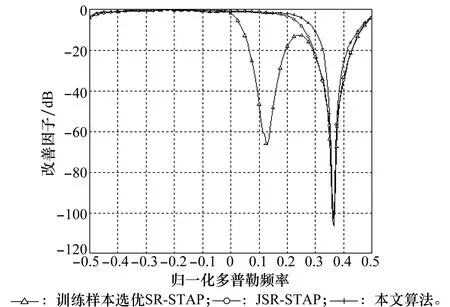
圖2 改善因子對比Fig.2 Improvement factor comparison
從圖2可以看出,本文算法在主雜波處雜波凹口最窄,較其他兩種算法本文算法不易造成漏警;本文算法在干擾目標(biāo)所在的fd/fr=0.125處沒有形成凹陷,不易造成虛警;本文算法相比訓(xùn)練樣本選優(yōu)SR-STAP算法平均改善8.25 dB,相比JSR-STAP算法平均改善1.55 dB。
在待檢測距離單元分別加入一個SCNR為-10 dB和-25 dB,方位角為30°,fd/fr=0.125的運(yùn)動目標(biāo)。圖3是第81~120個距離單元(第81個距離單元為待檢測距離單元)的濾波輸出功率。
為了驗(yàn)證所提出方案的可行性,制作了一臺實(shí)驗(yàn)樣機(jī),輸入電壓為0~120 V;輸出電壓為380 V,額定功率1 000 W。
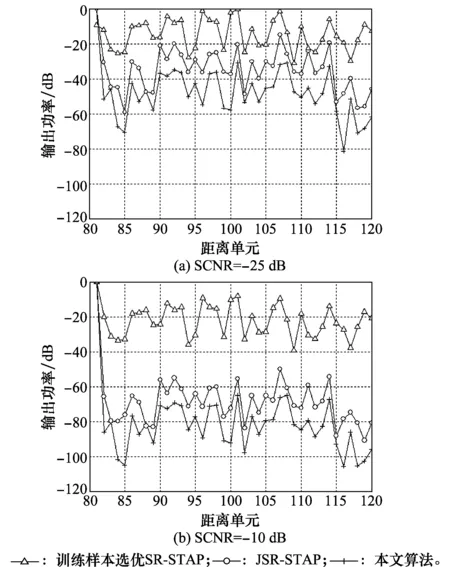
圖3 距離單元輸出功率Fig.3 Range cell output power
從圖3(a)可以看出,SCNR=-25 dB時,本文算法效果最好。本文算法待檢測距離單元的輸出功率與其他距離單元中最大的輸出功率差為30.7 dB,訓(xùn)練樣本選優(yōu)SR-STAP算法待檢測距離單元的輸出功率與其他距離單元中最大的輸出功率差為-9.1 dB,JSR-STAP待檢測距離單元的輸出功率與其他距離單元中最大的輸出功率差為14.7 dB。
從圖3(b)可以看出,SCNR=-10 dB時,本文算法效果最好。本文算法待檢測距離單元的輸出功率與其他距離單元中最大的輸出功率差為64.9 dB,訓(xùn)練樣本選優(yōu)SR-STAP算法待檢測距離單元的輸出功率與其他距離單元中最大的輸出功率差為8.0 dB,JSR-STAP待檢測距離單元的輸出功率與其他距離單元中最大的輸出功率差為49.7 dB。
在待檢測距離單元加入一個位于方位角40°,fd/fr=0.15的運(yùn)動目標(biāo)。利用IFSTP算法,通過設(shè)定相同的增長距離,提取目標(biāo)信息。圖4是訓(xùn)練樣本選優(yōu)SR-STAP算法和本文算法的目標(biāo)信號提取結(jié)果。
從圖4(a)可以看出,當(dāng)訓(xùn)練樣本中存在干擾目標(biāo)時,訓(xùn)練樣本選優(yōu)SR-STAP算法由于未對干擾目標(biāo)進(jìn)行剔除,在稀疏恢復(fù)空時譜時會包含干擾目標(biāo)的信息從而影響動目標(biāo)檢測性能。因此在提取出位于方位角40°,fd/fr=0.15處的運(yùn)動目標(biāo)的同時,在方位角30°,fd/fr=0.125處也提取出目標(biāo)(干擾目標(biāo))的信息,造成虛警;從圖4(b)可以看出,本文算法能夠正確提取出目標(biāo)信息且沒有造成虛警。
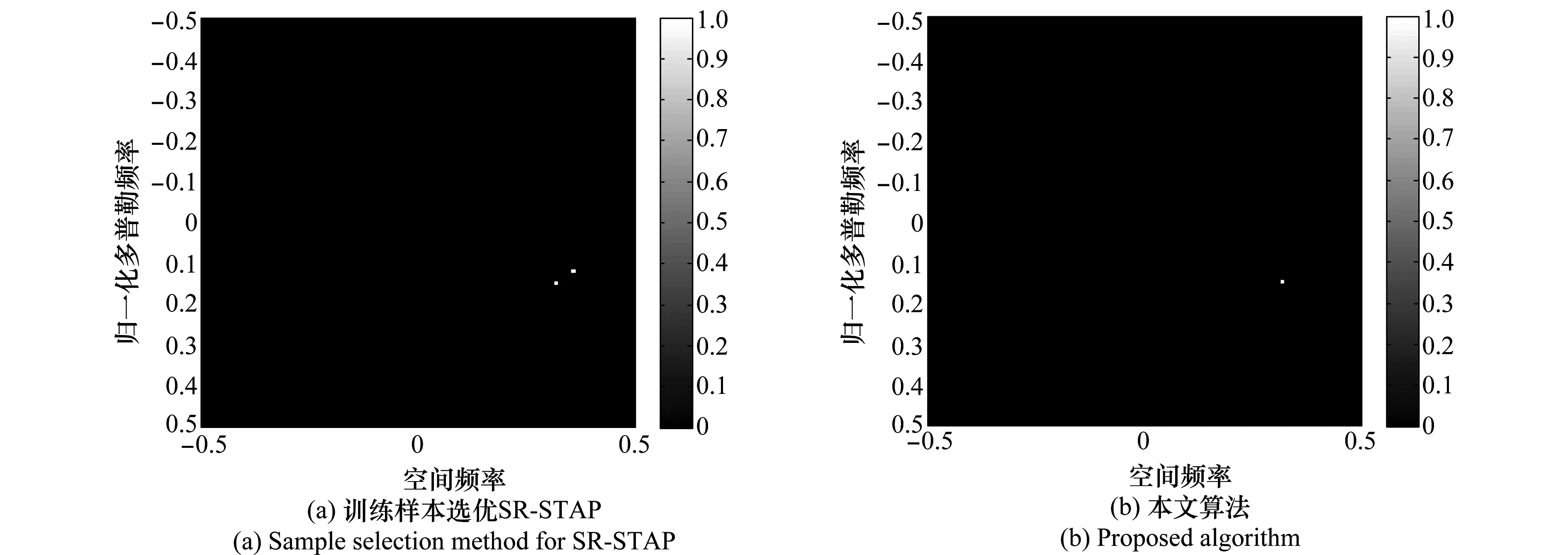
圖4 目標(biāo)信號提取ⅠFig.4 Target signal extraction Ⅰ
在待檢測距離單元加入兩個運(yùn)動目標(biāo)位于方位角40°,fd/fr=0.15和方位角55°,fd/fr=0.20處。圖5是JSR-STAP算法和本文算法的目標(biāo)信號提取結(jié)果。
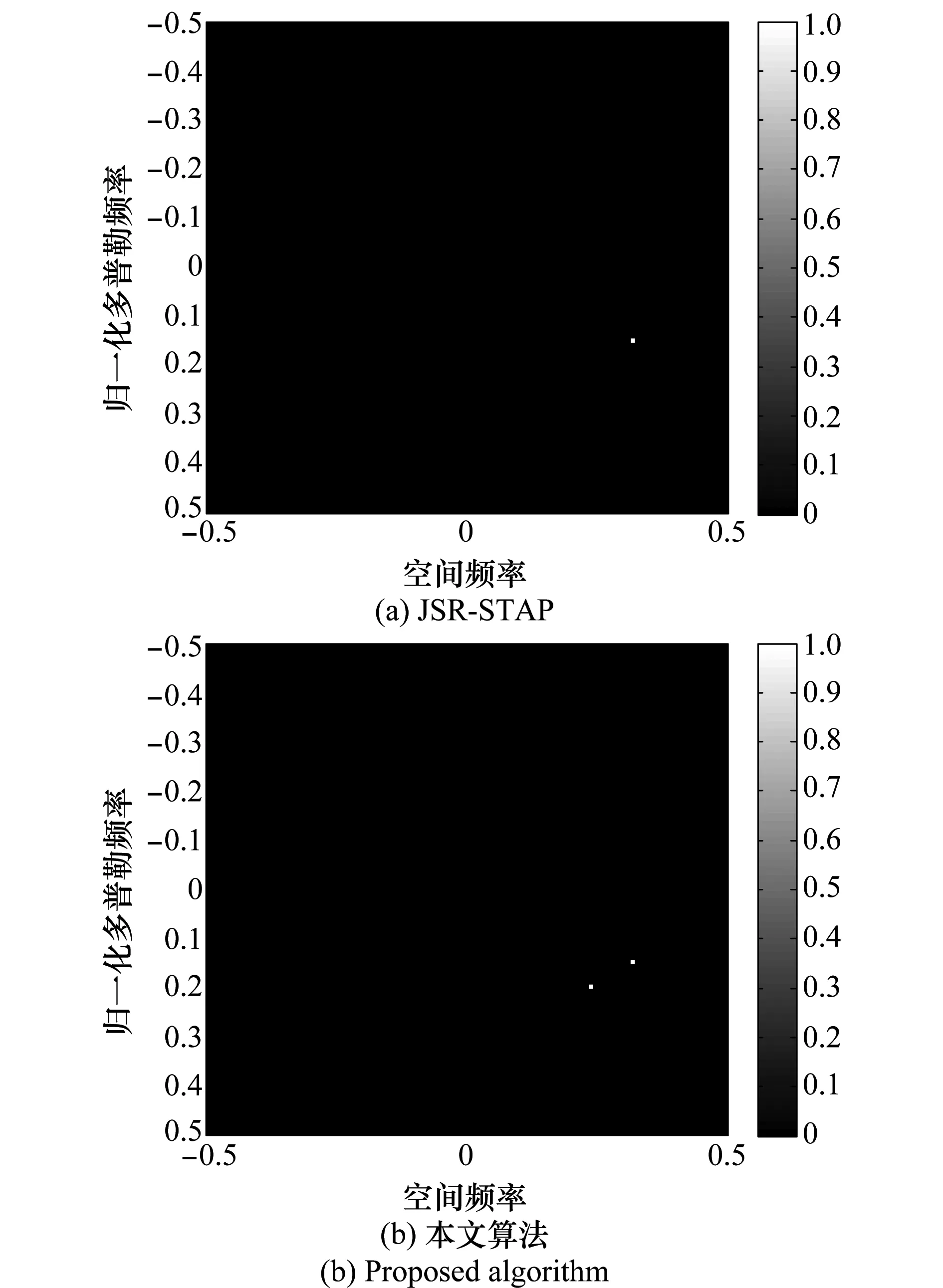
圖5 目標(biāo)信號提取ⅡFig.5 Target signal extraction Ⅱ
從圖5可以看出,JSR-STAP算法只是剔除了干擾目標(biāo)未對訓(xùn)練樣本進(jìn)行選優(yōu),造成稀疏恢復(fù)的雜波空時譜較本文算法稀疏恢復(fù)的雜波空時譜寬,從而影響動目標(biāo)的檢測性能。由于JSR-STAP算法雜波空時譜較寬,圖5(a)只提取出位于方位角40°,fd/fr=0.15處的目標(biāo),未提取出位于方位角55°,fd/fr=0.20處的目標(biāo),造成漏警。由圖5(b)可以看出,本文算法能夠正確提取出目標(biāo)信息且沒有造成漏警。仿真結(jié)果進(jìn)一步證明了本文算法的有效性。
5 結(jié) 論
本文針對存在干擾目標(biāo)的非均勻樣本中動目標(biāo)檢測性能下降的問題提出一種基于稀疏訓(xùn)練樣本選優(yōu)的機(jī)載雷達(dá)動目標(biāo)檢測算法,利用雜波譜的稀疏恢復(fù)算法對接收到的數(shù)據(jù)進(jìn)行重構(gòu),對訓(xùn)練樣本進(jìn)行選優(yōu),去除選優(yōu)后訓(xùn)練樣本中的干擾目標(biāo),從而提高機(jī)載雷達(dá)動目標(biāo)檢測性能。仿真結(jié)果表明,本文算法動目標(biāo)檢測的性能優(yōu)于訓(xùn)練樣本選優(yōu)SR-STAP算法和JSR-STAP算法。
參考文獻(xiàn):
[1] WANG Y L,LIU W J,XIE W C. Research progress of space-time adaptive detection for airborne radars[J]. Journal of Radars,2014, 3(2):201-207.
[2] YANG Z, QUAN G, MA Y, et al. Compressive space-time adaptive processing airborne radar with random pulse repetition interval and random arrays[C]∥Proc.of the 4th IEEE International Workshop on Compressed Sensing Theory and Its Applications to Radar, Sonar and Remote Sensing, 2016:247-251.
[3] ZHU Z, KAY S, COGUN F,et al. On detection of nonstationarity in radar signal processing[C]∥Proc.of the IEEE Radar Conference, 2016:1-4.
[4] WANG X R, ABOUTANIOS E, AMIN M G. Slow radar target detection in heterogeneous clutter using thinned space-time adaptive processing[J]. IET Radar, Sonar & Navigation, 2016, 10(4):726-734.
[5] 龔清勇. 非均勻環(huán)境下機(jī)載雷達(dá)STAP技術(shù)研究[D]. 南京:南京航空航天大學(xué),2010.
GONG Q Y. Study on STAP methods for airborne radar in nonhomogeneous enviro nment[D].Nanjing: Nanjing University of Aeronautics and Astronautics,2010.
[6] 孫珂. 非均勻雜波環(huán)境下基于稀疏恢復(fù)的STAP技術(shù)研究[D]. 北京:清華大學(xué),2011.
SUN K. STAP technique using sparse recovery in heterogeneous clutter scenario[D]. Beijing: Tsinghua University, 2011.
[7] MA Z, LIU Y, WANG X. Sparsity based space-time adaptive processing using message passing[C]∥Proc.of the 3rd IEEE International Workshop on Compressed Sensing Theory and Its Applications to Radar, Sonar and Remote Sensing, 2015:258-262.
[8] SEN S. Sparsity-based space-time adaptive processing using OFDM radar[C]∥Proc.of the IEEE International Waveform Diversity & Design Conference, 2012:160-165.
[9] YANG Z, LI X, WANG H, et al. Sparsity-based space-time adaptive processing using complex-valued Homotopy technique for airborne radar[J]. IET Signal Processing, 2014, 8(5):552-564.
[10] 高志奇,陶海紅,趙繼超.基于聯(lián)合稀疏功率譜恢復(fù)的機(jī)載雷達(dá)穩(wěn)健STAP算法研究[J].電子學(xué)報,2016,44(11):2796-2801.
GAO Z Q, TAO H H, ZHAO J C. Robust STAP algorithm based on joint sparse recovery of clutter spectrum for airborne radar[J]. Acta Electronica Sinina, 2016,44(11):2796-2801.
[11] MA Z Q, LIU Y M, MENG H D, et al. Jointly sparse recovery of multiple snapshots in STAP[C]∥Proc.of the IEEE Radar Conference, 2013:1-4.
[12] HAN S D, FAN C Y, HUANG X T. A novel training sample selection method for STAP based on clutter sparse recovery[C]∥Proc.of the IEEE Progress in Electromagnetic Research Symposium, 2016:2275-2279.
[13] YANG Z C, LI X, WANG H Q,et al. On clutter sparsity analysis in space-time adaptive processing airborne radar[J]. IEEE Geoscience and Remote Sensing Letters,2013,10(5):1214-1218.
[14] YANG Z, LI X, WANG H, et al. Knowledge-aided STAP with sparse-recovery by exploiting spatiotemporal sparsity[J]. IET Signal Processing, 2016, 10(2):150-161.
[15] ZHU Y, YANG Z C, HUANG J J. Robust sparsity-based space-time adaptive processing considering array gain/phase errors[C]∥Proc.of the 13th IEEE International Conference on Signal Processing, 2016:1624-1628.
[16] 王偉偉,廖桂生,朱圣棋,等. 一種基于壓縮感知的地面運(yùn)動目標(biāo)檢測方法[J]. 電子與信息學(xué)報, 2012,34(8): 1872-1878.
WANG W W, LIAO G S, ZHU S Q, et al. A ground moving target indication method based on compressive sensing[J]. Journal of Electronics & Information Technology,2012,34(8):1872-1878.
[17] DONOHO D L, ELAD M, TEMLYAKOV V N. Stable recovery of sparse overcomplete representations in the presence of noise[J]. IEEE Trans.on Information Theory, 2006, 52(1):6-18.
[18] SEN S. Low-rank matrix decomposition and spatio-temporal sparse recovery for stap radar[J]. IEEE Journal of Selected Topics in Signal Processing, 2015, 9(8):1510-1523.
[19] QUAN G, YANG Z, HUANG J, et al. Sparsity-based space-time adaptive processing in random pulse repetition frequency and random arrays rada[C]∥Proc.of the IEEE 13th Interna-tional Conference on Signal Processing, 2016:1642-1646.
[20] ZHU Y, YANG Z, HUANG J. Sparsity-based space-time adaptive processing considering array gain/phase error[C]∥Proc.of the CIE International Conference on Radar, 2016:1-4.
[21] DONOHO D L, ELADAR M. Optimally sparse representation in general (nonort-hogonal) dictionaries via L1 minimization[J]. IEEE Trans.on Signal Processing, 2003,12 (6):197-220.
[22] HONG L W, SHU W. Adaptive sparsity matching pursuit algorithm for sparse reconstruction[J]. IEEE Signal Processing Letter, 2012, 19(8):471-474.
[23] HUANG W Q, ZHAO J L, LV Z Q, et al. Sparsity and step-size adaptive regularized matching pursuit algorithm for compressed sensing[C]∥Proc.of 7th IEEE Joint Internatinal Information Technology and Artificial Intelligence Conference, 2014:536-540.
[24] LONG X, HU X, SHAODONG L, et al. A fast multiple orthogonal matching pursuit algorithm for jointly sparse recovery[C]∥Proc.of the CIE International Conference on Radar, 2016:1-3.
[25] ZHANG X, ZHOU B. Fast iterative reweighted least squares algorithm for sparse signals recovery[C]∥Proc.of the IEEE International Conference on Digital Signal Processing, 2016:208-212.
[26] YANG X, SUN Y, ZENG T, et al. Iterative roubust sparse recoery method based on focuss for space-time adaptive processing[C]∥Proc.of the IET International Radar Conference, 2015:1-6.
[27] HAI D, BRAHAM H, MICHAEL C W. Image feature-based space-time processing for ground moving target detection[J]. IEEE Signal Processing Letter, 2006, 13(4): 216-219.
[28] GENG Z, DENG H. Performance evaluation of image feature-based space-time processing (IFSTP) for moving target detection[C]∥Proc.of the IEEE Antennas and Propagation Society International Symposium, 2013:1024-1025.
猜你喜歡
中國設(shè)備工程(2022年12期)2022-07-11 04:33:00
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:36
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:34
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:50
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:48
