情報驅(qū)動的平行仿真實體動態(tài)生成方法
2018-04-26 07:31:06周芳,楚威,丁冉
系統(tǒng)工程與電子技術(shù) 2018年5期
周 芳, 楚 威, 丁 冉
(中國電子科技集團(tuán)公司第二十八研究所信息系統(tǒng)工程重點實驗室, 江蘇 南京 210007)
0 引 言
戰(zhàn)爭節(jié)奏的加快和未來高新技術(shù)武器的打擊速度,對戰(zhàn)場指揮員的指揮決策能力提出了全新的挑戰(zhàn),如何輔助戰(zhàn)場指揮員及時掌控戰(zhàn)場態(tài)勢、預(yù)測敵方可能采取的行動、建議在某種態(tài)勢下實施哪些作戰(zhàn)方案、推測已方武器的反擊效果等,實現(xiàn)對戰(zhàn)場態(tài)勢的主動掌控。平行仿真技術(shù)的提出為解決上述問題提供了一種新的途徑,美國國防部高級研究計劃局提出的“Deep Green Plan”[1-3]、美國空軍研究實驗室研制的基于動態(tài)數(shù)據(jù)驅(qū)動應(yīng)用系統(tǒng)的實時決策支持系統(tǒng)[4-7],目的是通過構(gòu)建與戰(zhàn)場客觀環(huán)境同步運行的平行仿真系統(tǒng),通過預(yù)先存儲的歷史數(shù)據(jù)和實時注入的情報數(shù)據(jù)來推演與預(yù)測未來可能的戰(zhàn)場態(tài)勢,輔助戰(zhàn)場指揮員提前做出預(yù)案。因此,構(gòu)建與真實戰(zhàn)場環(huán)境同步運行的平行仿真系統(tǒng)至關(guān)重要,其逼真度直接影響著未來時刻戰(zhàn)場態(tài)勢仿真推演的可信度。
平行仿真與現(xiàn)有的分布式仿真、并行仿真等相比,具有如下特點[8-11]:①仿真模型在仿真運行過程中動態(tài)加載,通過情報數(shù)據(jù)與仿真模型庫中模型進(jìn)行匹配,進(jìn)行模型實例化,并通過模型的動態(tài)組合以生成平行仿真系統(tǒng);②仿真模型動態(tài)演化。依據(jù)實時情報數(shù)據(jù),仿真模型的參數(shù)與模型輸出可動態(tài)修正與調(diào)整,具有自適應(yīng)演化特性,仿真模型粒度不斷精細(xì)。因此,仿真模型的動態(tài)匹配和模型動態(tài)組合是構(gòu)建和運行平行仿真系統(tǒng)的基礎(chǔ)和關(guān)鍵。
在仿真模型的動態(tài)組合研究方面,國內(nèi)外仿真學(xué)者普遍采用的方法涵蓋組件化建模方法[12-15]、面向服務(wù)模型組合方法[16-18],上述方法側(cè)重于解決實體模型的異構(gòu)問題,包括模型采用的技術(shù)體制和設(shè)計方法不同、實體模型的粒度不同(平臺級模型、聚合級模型等)、模型設(shè)計開發(fā)時缺少統(tǒng)一標(biāo)準(zhǔn)規(guī)范等問題。文獻(xiàn)[14]提出面向服務(wù)的作戰(zhàn)仿真模型組合建模方法,通過模塊化開發(fā)方法對模型服務(wù)進(jìn)行組合,解決模型匹配差異性和模型組合有效性等難題。實體組件化建模的設(shè)計方法,采用“方案-單元-實體-組件”方式的實體管理機制,規(guī)范仿真實體模型開發(fā)。上述方法中,仿真模型的組合是在仿真運行前通過一致性加載模型組件描述文件和組件執(zhí)行體完成,在仿真運行過程中不發(fā)生改變。而在平行仿真過程中,隨著戰(zhàn)場實時情報數(shù)據(jù)的不斷注入,平行仿真系統(tǒng)不斷匹配出新的實體組件,需要將不同仿真時刻匹配出的組件進(jìn)行組裝與拼接。上述方法的難點體現(xiàn)為:平行仿真運行過程中如何動態(tài)更新實體模型組件間的信息交互關(guān)系、如何將后續(xù)匹配的實體模型組件進(jìn)行組合、如何確保模型組件間信息交互關(guān)系的一致性等。
針對上述問題,本文提出了情報驅(qū)動的平行仿真實體動態(tài)生成方法,一方面,依據(jù)注入的戰(zhàn)場實時情報數(shù)據(jù),提出行為規(guī)則匹配的平行仿真實體模型匹配方法,解決戰(zhàn)場情報數(shù)據(jù)不完備條件下實體模型難以精準(zhǔn)匹配的難題。另一方面,針對仿真運行過程中平行仿真實體模型動態(tài)組合問題,從組件化建模的角度,提出基于仿真中間件的模型組件動態(tài)組合方法,建立模型組件間信息分發(fā)關(guān)系表,由仿真中間件動態(tài)更新模型組件間信息交互關(guān)系,并完成模型組件描述信息和組件執(zhí)行體的動態(tài)加載,實現(xiàn)平行仿真實體的快速生成。
1 面向指揮決策支持的平行仿真概念
面向指揮決策的平行仿真是指采用建模與仿真推演技術(shù),接收實裝指揮信息系統(tǒng)實時情報/態(tài)勢數(shù)據(jù),動態(tài)構(gòu)建與修正平行仿真實體,生成與客觀戰(zhàn)場環(huán)境平行運行的人工戰(zhàn)場環(huán)境(即平行仿真系統(tǒng)),將平行仿真系統(tǒng)超實時仿真與預(yù)測結(jié)果反饋到實際系統(tǒng)中,為指揮員提供未來可能態(tài)勢,輔助指揮員進(jìn)行超前決策。通過平行仿真系統(tǒng)的超實時仿真運行,對敵方目標(biāo)可能的作戰(zhàn)行動和意圖做出預(yù)測,仿真推演未來時刻可能的戰(zhàn)場態(tài)勢并反饋至實裝系統(tǒng),輔助指揮員快速“透視”和預(yù)測未來戰(zhàn)場態(tài)勢,動態(tài)生成或臨機調(diào)整預(yù)定作戰(zhàn)行動方案。圖1為面向指揮決策的平行仿真系統(tǒng)概念。從作戰(zhàn)過程的角度來看,面向指揮決策支持的平行仿真系統(tǒng)包括兩個環(huán):態(tài)勢推演環(huán)、作戰(zhàn)方案推演環(huán)。“態(tài)勢推演環(huán)”指從接受戰(zhàn)場情報數(shù)據(jù)開始,依托平行仿真推演引擎進(jìn)行戰(zhàn)場態(tài)勢超實時仿真推演,將態(tài)勢仿真推演結(jié)果反饋至實裝系統(tǒng)中。“作戰(zhàn)方案推演環(huán)”指針對指揮員臨時生成或調(diào)整的作戰(zhàn)行動方案,進(jìn)行方案仿真推演,將方案推演結(jié)果反饋至指揮員。

圖1 面向指揮決策的平行仿真概念Fig.1 Parallel simulation concepts for command decision support
2 基于元數(shù)據(jù)的平行仿真實體模型描述
2.1 平行仿真實體模型
借鑒組件化建模思想,從平行仿真實體功能劃分角度,遵循平行仿真實體的結(jié)構(gòu)屬性、功能屬性和任務(wù)屬性劃分原則,建立了一套平行仿真實體的組件化模型,將模型劃分為物理組件、行為組件與裁決評估組件等3類,各類組件的功能如表1所示。
2.2 平行仿真實體模型描述模板
借鑒基于基本對象模型(basic object model, BOM)的模型描述模板,結(jié)合實體組件化建模的特點,建立了基于元數(shù)據(jù)的平行仿真實體仿真模型描述模板,從模型識別屬性、模型功能屬性、模型實體屬性、模型交互屬性、組件化子模型配置5方面,提取平行仿真實體模型的元數(shù)據(jù),建立模型描述模板。
(1) 模型識別屬性
模型識別屬性元數(shù)據(jù)是對平行仿真實體模型的類型、名稱、標(biāo)識、模型關(guān)鍵詞、模型版本等屬性進(jìn)行描述,提供實體仿真模型的基礎(chǔ)描述信息,作為仿真模型與實時情報數(shù)據(jù)間快速匹配的依據(jù)。
(2) 模型功能屬性
模型功能屬性是對平行仿真實體模型的基本功能、能力特性、使用范圍等進(jìn)行描述,向模型使用人員提供模型功能的基本描述信息,用于仿真模型匹配的依據(jù)。
(3) 模型實體屬性
模型實體屬性是對平行仿真實體模型的配置參數(shù)類型、參數(shù)取值等信息進(jìn)行描述,具體涵蓋模型實體標(biāo)識、物理特征、行為能力、工作參數(shù)等屬性,具體內(nèi)涵如下:
①模型實體標(biāo)識:描述戰(zhàn)場實體的類型、名稱、型號等固有特征的識別信息,作為實體身份的唯一標(biāo)識信息等;
②模型實體物理特征:描述戰(zhàn)場實體的物體尺度、易毀屬性、部署位置等固有特征;
③模型實體行為能力:指戰(zhàn)場實體的行動模式、行動時間、行動路線等規(guī)劃信息;
④模型實體工作參數(shù):指戰(zhàn)場實體模型的計算、推演、運算所需的配置參數(shù)。
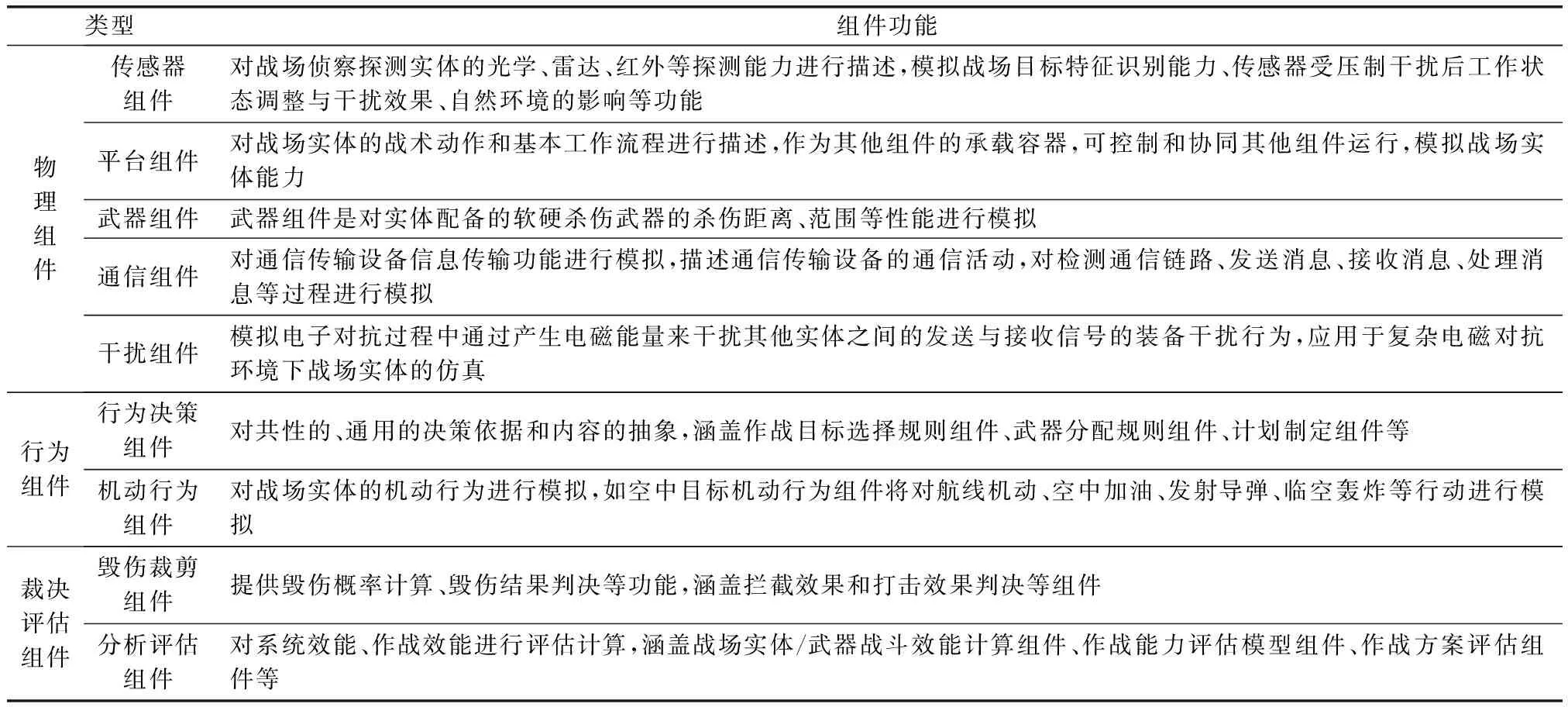
表1 平行仿真實體模型組件
(4) 模型交互屬性
交互屬性元數(shù)據(jù)是指對平行仿真實體模型的調(diào)用參數(shù)、信息交互關(guān)系、輸入/輸出接口等模型交互信息進(jìn)行描述,以實現(xiàn)平行仿真系統(tǒng)運行過程中實體仿真模型間信息互通與互操作。從實體仿真模型的接口調(diào)用和信息交互兩方面進(jìn)行描述。
(5) 組件化子模型配置
組件化子模型配置是對組成戰(zhàn)場實體的附加子模型數(shù)量、子模型類型、名稱、標(biāo)識、子模型參數(shù)類型、取值范圍等屬性進(jìn)行設(shè)置,通過靈活配置實體的組件化子模型,實現(xiàn)實體仿真模型的動態(tài)組合,提高仿真模型動態(tài)生成的靈活性和效率。
3 情報驅(qū)動的平行仿真實體動態(tài)生成
平行仿真系統(tǒng)中仿真實體的生成與現(xiàn)有分布式/并行仿真系統(tǒng)中仿真實體生成不同之處在于:一是平行仿真實體是在仿真運行過程中動態(tài)生成,與仿真時間相關(guān);二是平行仿真實體是依據(jù)注入的實時情報數(shù)據(jù),并與仿真模型匹配后動態(tài)生成,而現(xiàn)有仿真實體生成是在仿真初始時刻啟動運行,與戰(zhàn)場情報數(shù)據(jù)無關(guān);三是仿真運行過程中隨著情報數(shù)據(jù)不斷積累,由不同時刻匹配的仿真模型動態(tài)組合后構(gòu)成完整的平行仿真實體。
針對上述特點,提出了情報驅(qū)動的平行仿真實體動態(tài)生成方法,如圖2所示,具體可分為3個環(huán)節(jié):戰(zhàn)場情報特征提取、仿真模型匹配、仿真模型動態(tài)組合。其中,戰(zhàn)場情報特征提取負(fù)責(zé)接收實時注入的戰(zhàn)場空情、海情、電抗等情報數(shù)據(jù),提取實時情報的特征數(shù)據(jù),作為仿真模型匹配的依據(jù);仿真模型匹配環(huán)境將根據(jù)提取的特征數(shù)據(jù),與仿真模型進(jìn)行動態(tài)匹配;仿真模型動態(tài)組合環(huán)節(jié)完成不同仿真時刻匹配的仿真模型關(guān)聯(lián)與動態(tài)組裝,動態(tài)生成平行仿真實體。
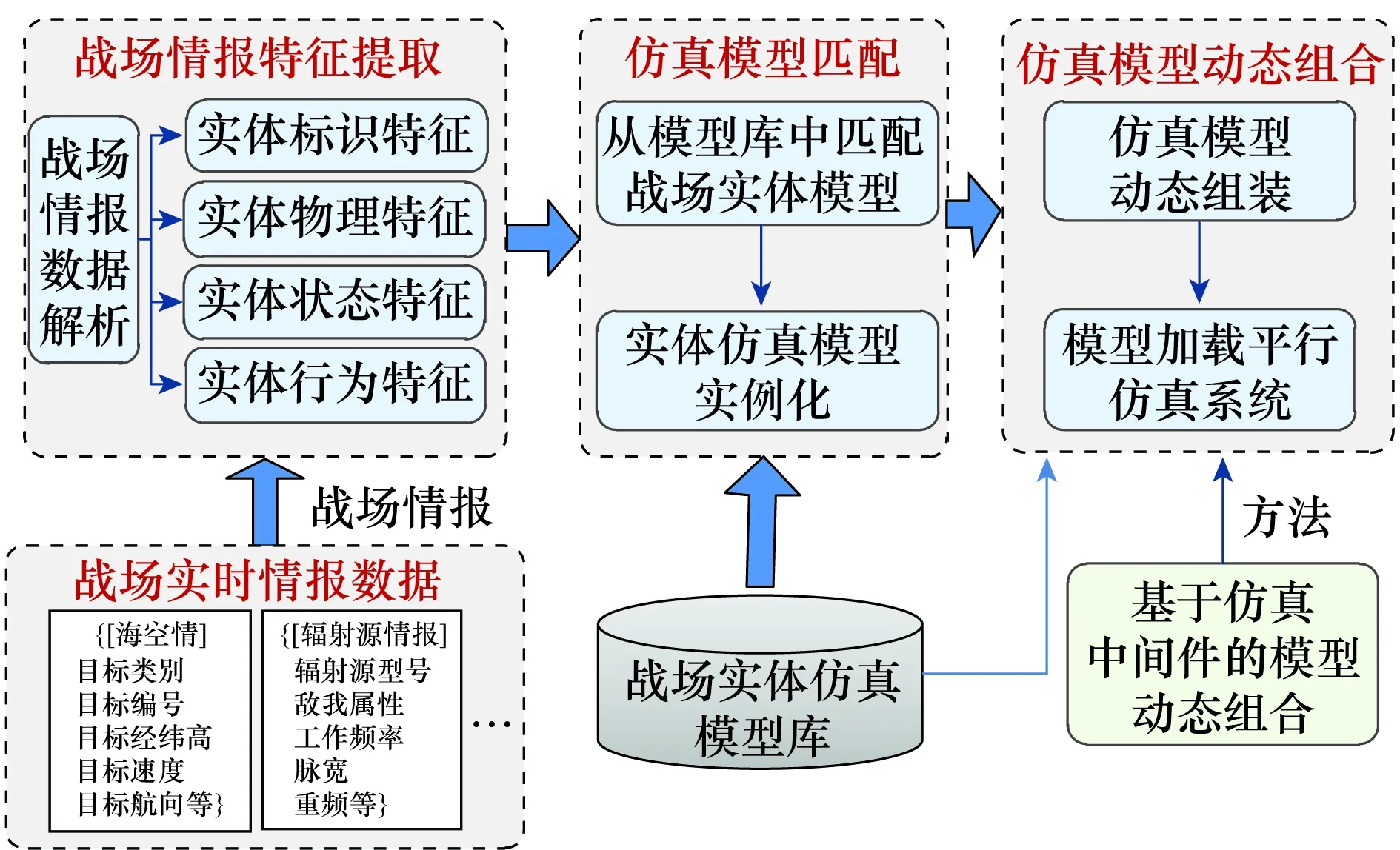
圖2 情報驅(qū)動的平行仿真實體動態(tài)生成方法Fig.2 Dynamic generation method for parallel simulation entity based on intelligence driven
3.1 基于行為規(guī)則的平行仿真實體模型動態(tài)匹配
平行仿真實體模型與情報數(shù)據(jù)匹配存在以下難點:由于戰(zhàn)場情報不完備、不確定性,導(dǎo)致情報特征與仿真模型描述信息難以精確匹配,可能匹配多個仿真模型,甚至無法匹配,如依據(jù)空情中目標(biāo)類型、國別、位置、速度、航向等數(shù)據(jù),只能匹配出空中平臺仿真模型,但難以判定具體哪種類別、型號的仿真模型。針對戰(zhàn)場情報不完備的難點,提出基于行為規(guī)則的仿真模型匹配方法,其過程包括環(huán)節(jié):一是依據(jù)戰(zhàn)場情報數(shù)據(jù)中情報類型、目標(biāo)實體類別、目標(biāo)大小等基礎(chǔ)特征信息,與仿真模型庫中模型描述信息進(jìn)行遍歷匹配,匹配出粗粒度的平行仿真實體模型。二是在戰(zhàn)場情報數(shù)據(jù)處理的基礎(chǔ)上,通過戰(zhàn)場實體目標(biāo)的行為狀態(tài)、行動模式、實體能力等行為規(guī)則,與平行仿真實體模型描述信息進(jìn)行匹配,實現(xiàn)平行仿真實體模型的精細(xì)化。具體算法如圖3所示。

圖3 基于行為規(guī)則的平行仿真實體模型匹配方法Fig.3 Matching method of parallel simulation entity model based on behavior rules
(1) 模型類別匹配
模型類別匹配采用模型類別匹配映射表方法進(jìn)行匹配,通過匹配映射表判斷當(dāng)前戰(zhàn)場情報數(shù)據(jù)中目標(biāo)實體屬于哪類仿真模型。匹配過程為:根據(jù)平行仿真實體模型組成體系,建立戰(zhàn)場情報數(shù)據(jù)與平行仿真實體模型分類體系的映射關(guān)系;在匹配過程中,依據(jù)實時的戰(zhàn)場情報中實體類型標(biāo)識碼/名稱,通過查詢映射關(guān)系表,獲取當(dāng)前平行仿真實體仿真模型類型。
(2) 行為規(guī)則匹配
行為規(guī)則匹配是指通過對提取的戰(zhàn)場情報數(shù)據(jù)進(jìn)行處理后,與仿真模型庫中目標(biāo)實體行為規(guī)則描述信息進(jìn)行匹配,實現(xiàn)平行仿真實體模型的精細(xì)化。行為規(guī)則匹配包括戰(zhàn)場實體目標(biāo)的行為狀態(tài)匹配、行動模式、實體能力等規(guī)則。
其中,行為狀態(tài)匹配是指根據(jù)實時情報中目標(biāo)實體的物理大小、航跡、航向、速度與速度變化率、高度與高度變化率等特征參數(shù),與仿真模型庫中模型實體屬性參數(shù)信息(如大中小型目標(biāo)、速度與速度變化率范圍、高度及高度變化率范圍等)進(jìn)行綜合匹配,判斷目標(biāo)實體運行狀態(tài)數(shù)據(jù)是否在模型實體屬性參數(shù)范圍內(nèi),以此匹配目標(biāo)實體模型的具體類別與型號,如判斷當(dāng)前空中目標(biāo)為轟炸機、殲擊機、電子偵察機、空中巡航彈道等,從而實現(xiàn)平行仿真實體模型的進(jìn)一步精細(xì)化。
行動模式匹配是指根據(jù)戰(zhàn)場實體目標(biāo)的行動模式,如空中平臺的目標(biāo)搜索雷達(dá)的開關(guān)機狀態(tài)、平臺巡邏、爬高或者俯沖等行動模式,與平行仿真實體模型描述信息匹配,該類匹配采用相似度計算方法。
假定平行仿真模型對目標(biāo)實體的行動模式做出了規(guī)范化定義,不需要進(jìn)行規(guī)范化處理。行動模式相似度采用編輯距離來衡量,編輯距離為1表示完全匹配,直接細(xì)化平行仿真實體模型類別。對于指定的2個字符串M1和M2,編輯距離是指將M1轉(zhuǎn)換到M2所需基本字符編輯操作(插入、刪除和替換)的最少次數(shù)。
設(shè)兩字符串編輯距離為Distance(m,n),M1與M2字符長度分別為m、n,一次基本字符編輯操作的代價為1,則行動模式匹配相似度表達(dá)式為
式中,sim(M1,M2)為行動模式匹配相似度。
3.2 基于仿真中間件的平行仿真實體模型動態(tài)組合
與現(xiàn)有仿真模型組合不同之處表現(xiàn)為:平行仿真實體模型組合是在仿真運行過程中動態(tài)完成,根據(jù)實時注入的情報數(shù)據(jù),將不同仿真時刻動態(tài)匹配出的模型組件與預(yù)先匹配的模型組件進(jìn)行動態(tài)組合。以預(yù)警機實體為例,作戰(zhàn)初始階段由于機載探測雷達(dá)處于無線靜默狀態(tài),此時預(yù)警機模型僅為空中平臺組件;隨著作戰(zhàn)時間推移,通過電子偵察手段探測到預(yù)警機上掛載的雷達(dá)開機工作后,實時情報處理系統(tǒng)更新關(guān)聯(lián)后的空中平臺與雷達(dá)情報信息。此時,將匹配的雷達(dá)組件與空中平臺組件進(jìn)行動態(tài)拼接,動態(tài)組合成預(yù)警機實體模型。而現(xiàn)有仿真實體模型的組合是在仿真運行前一致性裝配組件描述文件和加載組件執(zhí)行體,組件之間通過共享數(shù)據(jù)的方式實現(xiàn)信息傳遞,仿真實體模型之間通過消息驅(qū)動和實現(xiàn)機制完成信息交互。上述特點帶來以下難題:如何將不同仿真時刻匹配的組件進(jìn)行動態(tài)關(guān)聯(lián)與組合、如何動態(tài)建立與更新組件間信息交互關(guān)系等。
針對上述問題,采用仿真中間件實現(xiàn)平行仿真實體模型動態(tài)組合,其核心思想為:改變現(xiàn)有組件之間直接進(jìn)行信息交互的模式,轉(zhuǎn)變?yōu)橛煞抡嬷虚g件完成模型組件間信息交互,實現(xiàn)仿真數(shù)據(jù)在模型組件之間的透明傳輸。平行仿真實體模型動態(tài)組合劃分為兩階段:信息交互關(guān)系設(shè)置、組件執(zhí)行體裝配階段。具體如圖4所示。
3.2.1 仿真中間件
仿真中間件是指提供仿真模型組件動態(tài)匹配與加載調(diào)度、模型組件管理、模型組件交互管理、時間管理、仿真運行控制管理等功能,完成仿真模型組件間信息交互的運行支撐平臺。
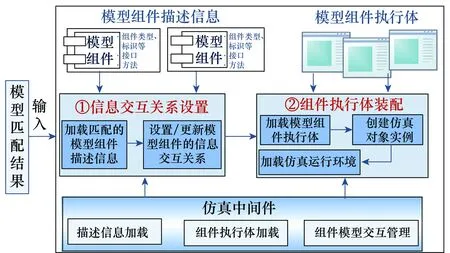
圖4 基于仿真中間件的平行仿真實體模型動態(tài)組合Fig.4 Dynamic composition of parallel simulation entity model based on simulation middleware
其中,模型組件管理部分包括模型靜態(tài)管理和動態(tài)管理模塊,靜態(tài)管理模塊主要建立構(gòu)建模型組件、對模型的識別信息和描述信息進(jìn)行統(tǒng)一管理,包括模型的類別、標(biāo)識、功能、模型實體屬性等,提供對模型的增加、刪除、修改和查詢等功能;動態(tài)管理模塊提供模型運行過程中模型屬性的賦值和方法的調(diào)用。
模型組件交互管理模塊提供模型組件之間信息交互關(guān)系的建立、更新、刪除、維護(hù)等管理功能。
3.2.2 平行仿真實體模型組件描述
平行仿真實體模型組件由屬性、方法與接口組成,屬性體現(xiàn)組件配置信息和能力特性,包括組件類型、名稱、標(biāo)識ID、仿真開始運行時間、結(jié)束時間等。方法反映組件的具體業(yè)務(wù)功能或業(yè)務(wù)操作。接口用于組件與仿真中間件的交互,具體包括動態(tài)加載接口、初始化接口、仿真時間推進(jìn)接口、組件狀態(tài)輸入與輸出接口、事件輸入與輸出接口。①動態(tài)加載接口用于仿真中間件對模型組件可執(zhí)行代碼進(jìn)行加載與控制,將可執(zhí)行代碼加載至仿真運行環(huán)境中;②初始化接口用于對加載的組件參數(shù)進(jìn)行賦值;③仿真時間推進(jìn)接口用仿真中間件控制組件仿真時間的推進(jìn);④組件狀態(tài)輸入與輸出接口:用于向仿真中間件公布自身狀態(tài)信息和需訂閱的狀態(tài)信息;⑤事件輸入與輸出接口:用戶向仿真中間件發(fā)布和接收事件。
在模型組件規(guī)范化描述的基礎(chǔ)上,通過構(gòu)建信息交互關(guān)系映射表,依據(jù)實時融合處理后情報數(shù)據(jù)(如預(yù)警雷達(dá)與空中平臺進(jìn)行關(guān)聯(lián),對應(yīng)同一的空中目標(biāo)),仿真中間件將動態(tài)修正信息交互關(guān)系映射表,動態(tài)組合不同時刻匹配的模型組件。
定義1信息交互關(guān)系表——實體模型組件間信息交互關(guān)系,涵蓋組件信息分發(fā)和訂閱關(guān)系,確保模型組件信息交互的一致性,如圖5所示。
假設(shè)實體模型A共有n個組件,標(biāo)記為a1,a2,…,an,實體模型B有m個組件,標(biāo)記為b1,b2,…,bm,模型組件間信息交互關(guān)系包括組件與組件之間、組件與實體模型間交互關(guān)系,不失一般性,采用信息交互映射函數(shù)rel(ai,aj)表示模型組件間的信息交互關(guān)系,表示為
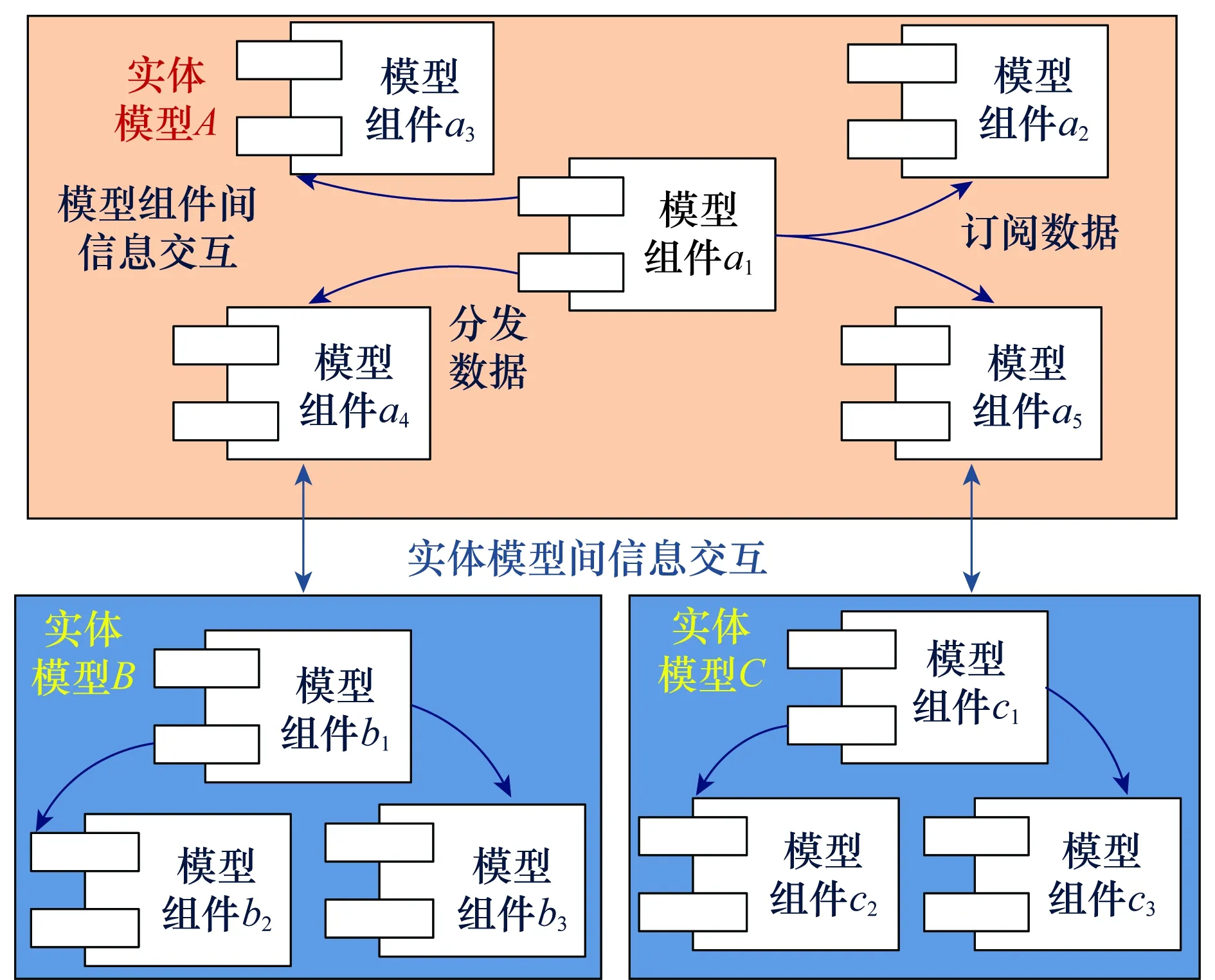
圖5 平行仿真實體模型組件間信息交互Fig.5 Information interaction between parallel simulation entity model component
則平行仿真實體模型間的信息交互關(guān)系可表示為
式中,Map(A)表示實體模型A內(nèi)組件間信息交互關(guān)系矩陣;Map(A,B)表示實體模型A與實體模型B之間信息交互關(guān)系矩陣。
3.2.3 信息交互關(guān)系的設(shè)置
信息交互關(guān)系的設(shè)置將依據(jù)實時情報數(shù)據(jù)中目標(biāo)標(biāo)識號以及目標(biāo)之間的通信關(guān)系(這是由于電子偵察、技術(shù)偵察等手段,可探測戰(zhàn)場目標(biāo)之間是否通信),由仿真中間件完成。具體過程為:由仿真中間件中模型組件交互管理模塊判斷當(dāng)前目標(biāo)匹配的模型組件是否已加載,若首次加載,則根據(jù)目標(biāo)標(biāo)識號與目標(biāo)通信關(guān)系,實時更新信息交互關(guān)系表中映射關(guān)系。以預(yù)警機實體模型為例,初始時刻匹配出空中目標(biāo)(A1)模型,隨著情報積累,在t1時刻探測出空中目標(biāo)A2與A1之間有通信,根據(jù)A1與A2間通信關(guān)系,仿真中間件動態(tài)更新信息交互關(guān)系表,完成模型組件間的信息交互。
3.2.4 組件執(zhí)行體裝配
平行仿真實體模型組件執(zhí)行體以“DLL/Com”形式存在,是與特定的編程語言、平臺相關(guān)的模型。采用黑盒組合方法,依據(jù)模型組件執(zhí)行體所在的存儲路徑,通過仿真中間件將組件執(zhí)行體加載到平行仿真系統(tǒng)中。在模型組件運行過程中,模型組件之間的信息交互將通過仿真中間件中模型組件交互管理模塊完成,模型組件之間不直接進(jìn)行數(shù)據(jù)交互,即模型組件輸出的數(shù)據(jù)先發(fā)送至仿真中間件,由仿真中間件將信息轉(zhuǎn)發(fā)至目標(biāo)組件。
4 仿真實驗結(jié)果
以某熱點區(qū)域聯(lián)合防空作戰(zhàn)為案例,設(shè)計不同規(guī)模和想定任務(wù)的試驗想定,根據(jù)情報驅(qū)動的平行仿真實體動態(tài)生成方法,統(tǒng)計不同想定下的平行仿真實體模型的匹配時間、匹配成功率和仿真實體生成時間。
根據(jù)區(qū)域聯(lián)合防空作戰(zhàn)的使用任務(wù),假定某時刻藍(lán)方空中目標(biāo)從不同方位突然轉(zhuǎn)向,飛向紅方某防空基地與機場等重要目標(biāo),實施重點目標(biāo)打擊任務(wù)。為此,在想定中,分別設(shè)計了N批(N=5,10,50,100,150,200)不同波次的藍(lán)方空中作戰(zhàn)力量,涵蓋實施空中偵察預(yù)警任務(wù)、掩護(hù)任務(wù)、突擊任務(wù)與電子干擾任務(wù)等的作戰(zhàn)飛機。
針對上述試驗想定,重復(fù)進(jìn)行多組試驗,統(tǒng)計不同規(guī)模的藍(lán)方目標(biāo)條件下仿真實體模型匹配時間和平均匹配時間,如圖6所示。
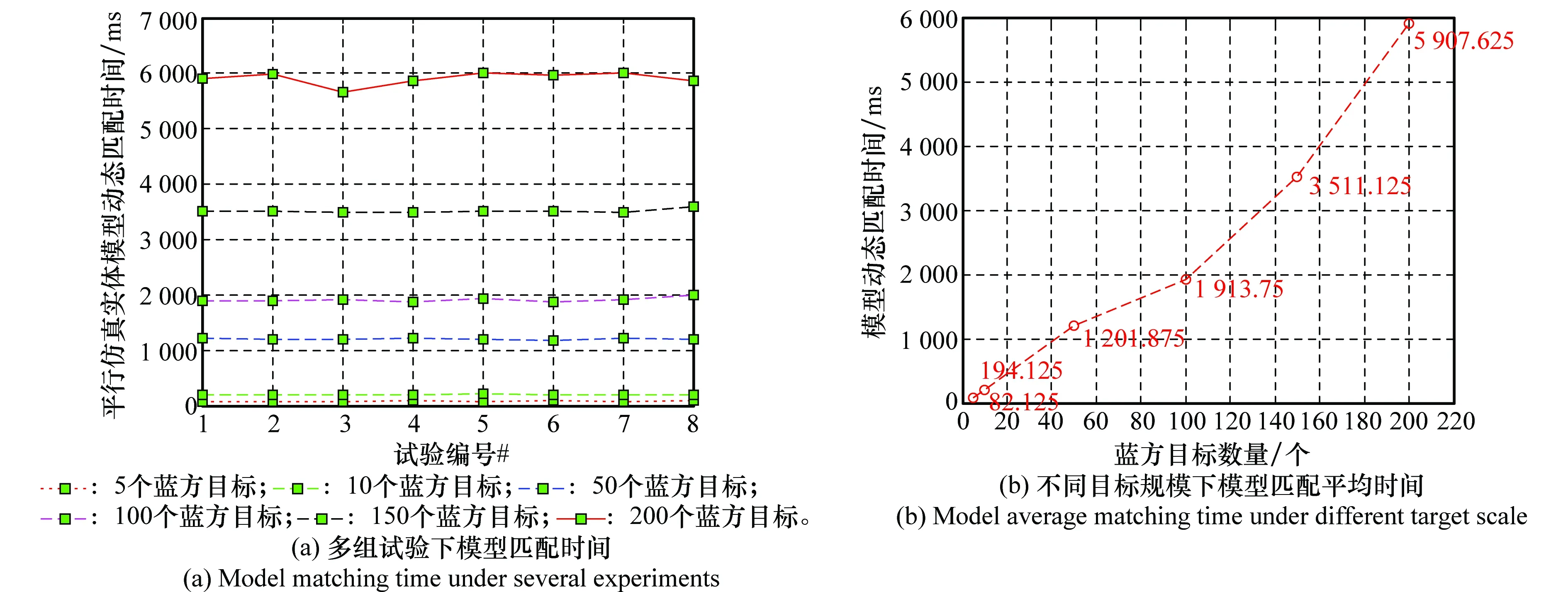
圖6 不同目標(biāo)規(guī)模下平行仿真實體模型匹配時間Fig.6 Matching time of parallel simulation entity model under different target scale
在戰(zhàn)場情報數(shù)據(jù)不完備條件下,分別采用本文方法與基于關(guān)鍵字的模型匹配方法進(jìn)行驗證。假定實時情報數(shù)據(jù)中僅給出目標(biāo)類型、標(biāo)識、位置、速度、航向、大小等標(biāo)識信息,從模型匹配時間和模型匹配成功率兩方面進(jìn)行綜合比較,如圖7和圖8所示。
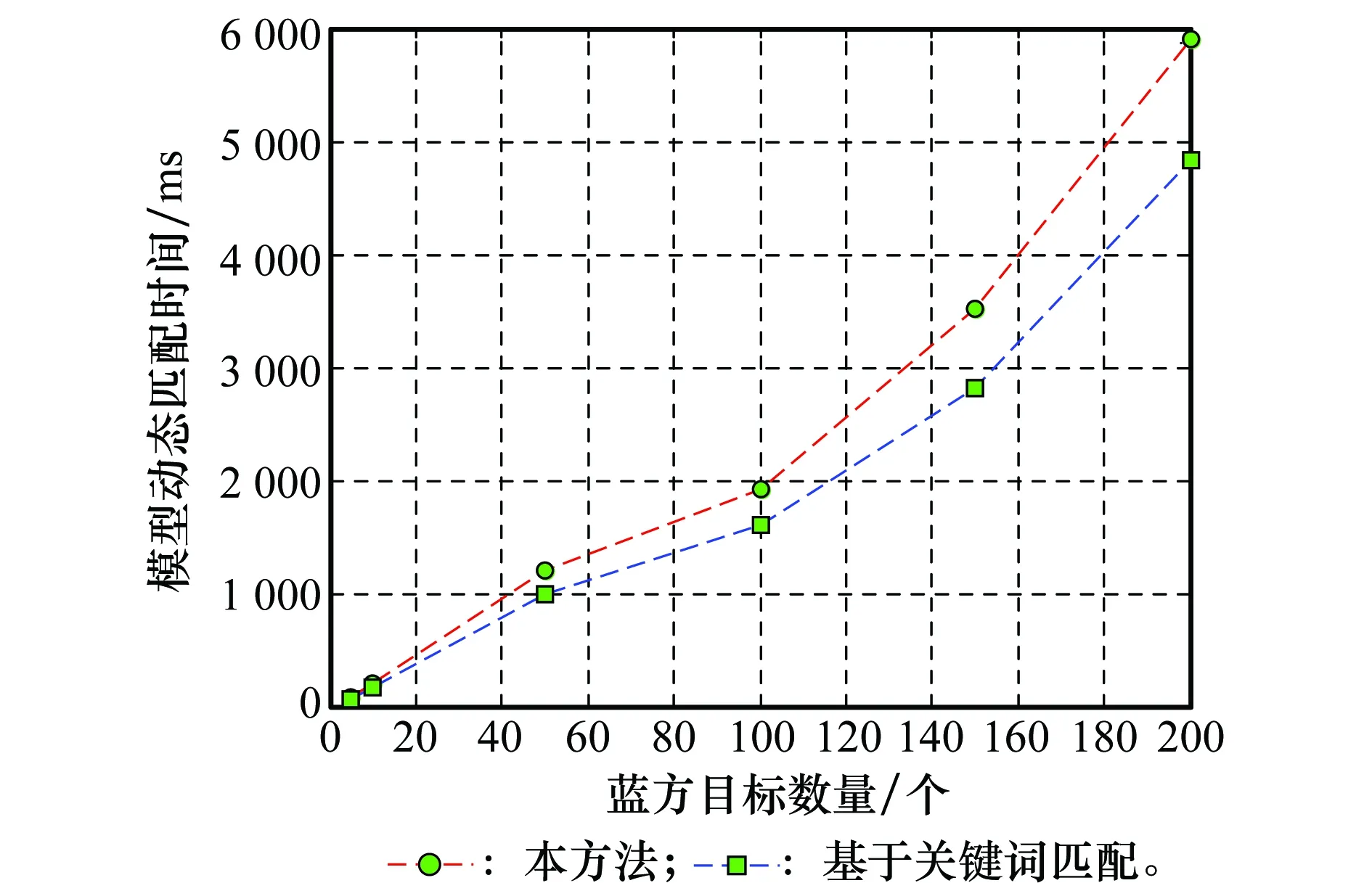
圖7 平行仿真實體模型匹配時間對比曲線Fig.7 Comparison curves about matching time of parallel simulation entity model
根據(jù)圖7和圖8可知,與基于關(guān)鍵字匹配方法相比,隨著藍(lán)方目標(biāo)數(shù)量的增加,本文方法在匹配成功率上明顯優(yōu)于基于關(guān)鍵字的匹配成功率,但匹配時間要稍長于后者,這是因為本文方法在關(guān)鍵詞匹配的基礎(chǔ)上增加了實體的運行狀態(tài)與行為模式的匹配,大幅度提高了匹配成功率,同時也增加了匹配時間。
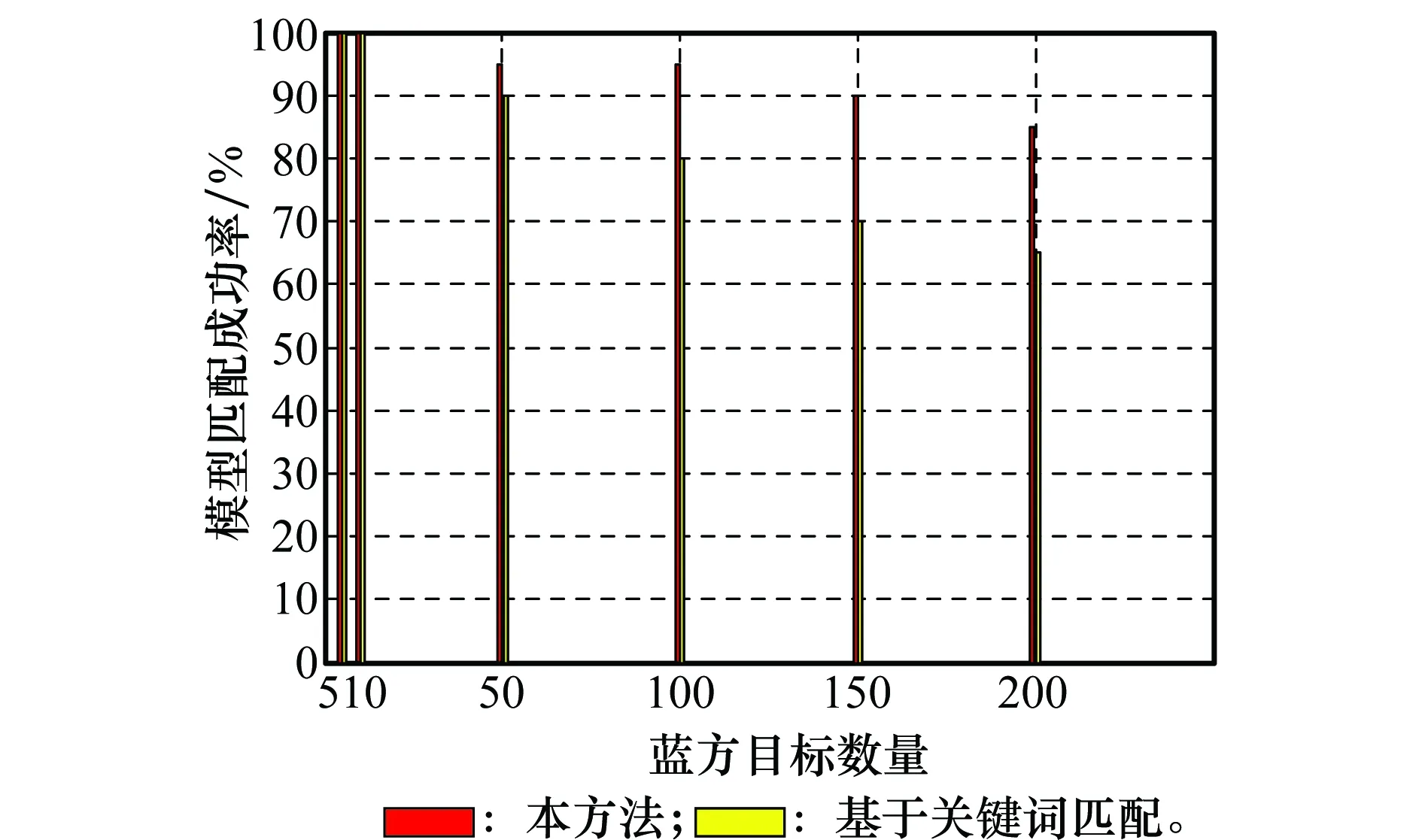
圖8 平行仿真實體模型匹配成功率對比曲線Fig.8 Comparison curves about matching success rate of parallel simulation entity model
為有效驗證平行仿真實體模型動態(tài)生成效率,假定在某時刻t2藍(lán)方作戰(zhàn)飛機中掛載的雷達(dá)設(shè)備、電臺開機,紅方通過雷達(dá)對抗偵察和通信對抗偵察等手段,獲取藍(lán)方作戰(zhàn)飛機掛載的雷達(dá)、電臺設(shè)備的類型、型號、工作參數(shù)等情報數(shù)據(jù),匯聚至情報處理系統(tǒng)中進(jìn)行融合處理,并發(fā)送至平行仿真系統(tǒng)中。此時,平行仿真系統(tǒng)同步動態(tài)匹配出雷達(dá)模型組件與電臺模型組件,由仿真中間件完成雷達(dá)/電臺組件的動態(tài)組合,同時更新組件間信息交互關(guān)系。從模型動態(tài)組合效率的角度,設(shè)計不同規(guī)模的藍(lán)方空中目標(biāo),分別統(tǒng)計模型組件信息交互關(guān)系動態(tài)更新時間、組件執(zhí)行體本地加載時間、組件參數(shù)賦值時間,作為模型組件動態(tài)組合時間,如圖9所示。
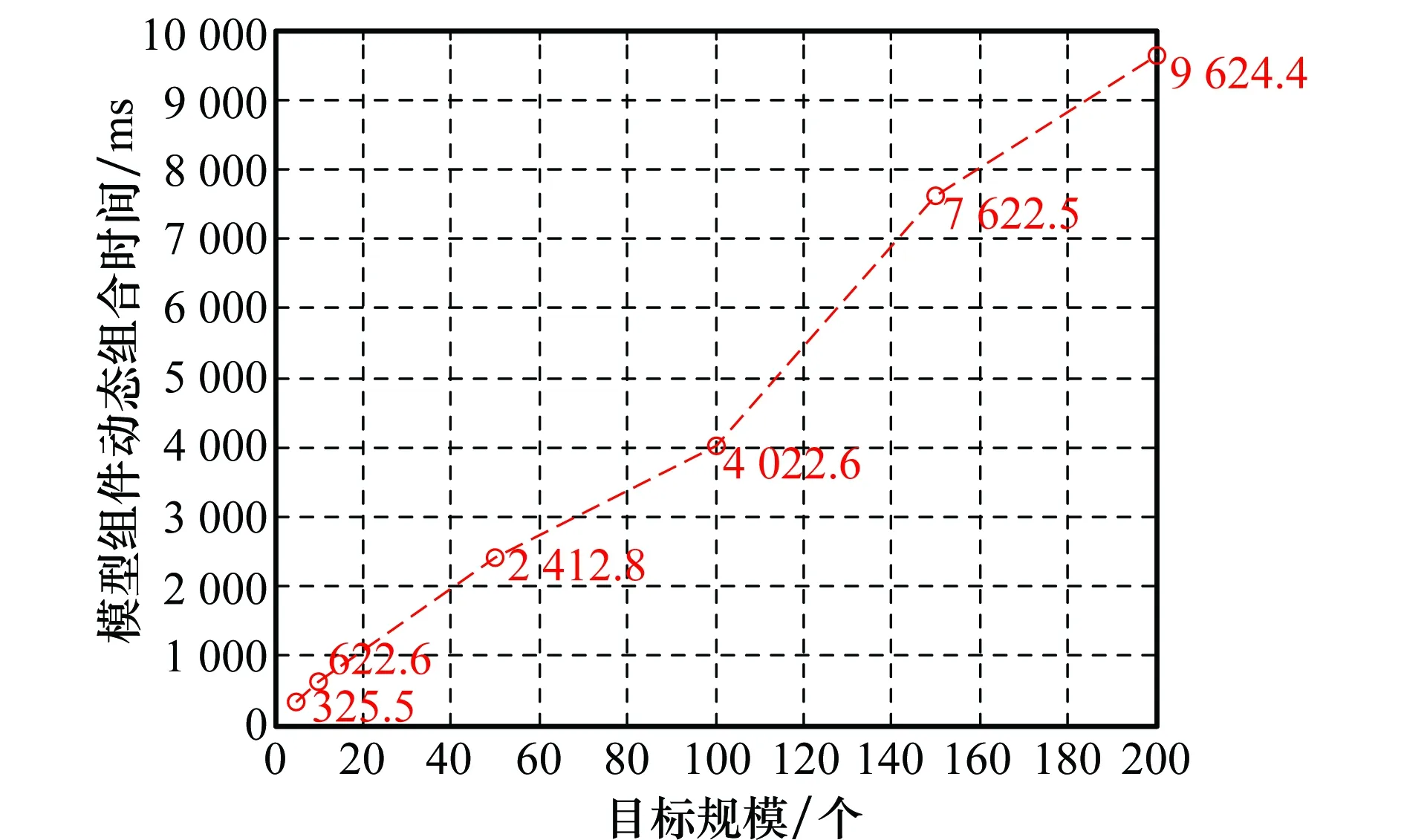
圖9 平行仿真實體模型組件動態(tài)組合時間Fig.9 Dynamic composition time of parallel simulation entity model component
5 結(jié)束語
利用平行仿真系統(tǒng)實現(xiàn)對未來戰(zhàn)場態(tài)勢仿真推演與預(yù)測,核心是靈活、動態(tài)且快速生成平行仿真實體。實時注入的戰(zhàn)場情報數(shù)據(jù)是實現(xiàn)平行仿真實體模型動態(tài)匹配與實體動態(tài)生成的核心依據(jù),本文采用基于實體行為規(guī)則的匹配方法解決了戰(zhàn)場情報信息不完備情況下平行仿真實體模型精準(zhǔn)匹配難的問題;進(jìn)一步采用仿真中間件解決模型組件的靈活組合問題。在作戰(zhàn)應(yīng)用實例中,與現(xiàn)有關(guān)鍵字匹配方法相比,本文方法能夠大幅提升平行仿真實體模型匹配的準(zhǔn)確率,從而確保平行仿真系統(tǒng)的可信度。
參考文獻(xiàn):
[1] LAYMAN G,DALY J. C4I tactical applications utilizing embedded simulations[C]∥Proc.of the Command and Control Research and Technology Symposium, 2002: 1-15.
[2] KENYON H S. Deep green helps warriors plan ahead[J].Signal, 2007(v).
[3] SURDU J R, KITTKA K. The deep green concept[C]∥Proc.of the Spring Simulation Multiconference, Military Modeling and Simulation, 2012: 20-28.
[4] DDDAS Workshop Report. NSF sponsored workshop on DDDAS-dynamic data driven applications systems[EB/OL].[2006-1-19]. http:∥www.cise.nsf.gov/dddas.
[5] GILMOUR D, HANNA J, MCKEEVER B, et al. High performance computing for command and control real-time decision support[R]. AFRL Technology Horizons, 2005.
[6] GILMOUR D A, HANNA J P, MCKEEVER W E, et al. Real-time course of action analysis[C]∥Proc.of the 10th International Command and Control Research and Technology Symposium, 2006.
[7] GILMOUR D A, MCKEEVER W E. High performance computing (HPC) for real-time course of action (COA) analysis. AFRL-RI-RS-TR-2007-273[R].Austin:Distribution Unlimited,2008.
[8] 竇林濤,初陽,周玉芳,等. 平行仿真技術(shù)在指控系統(tǒng)中的應(yīng)用設(shè)想[J]. 指揮控制與仿真, 2017, 39(1): 62-69.
DOU L T, CHU Y, ZHOU Y F, et al. Conception of the application of parallel simulation technology in command and control system[J]. Command and Simulation, 2017, 39(1): 62-69.
[9] 毛少杰,鄧克波. 網(wǎng)絡(luò)化和服務(wù)化C4ISR系統(tǒng)復(fù)雜性[J].指揮信息系統(tǒng)與技術(shù),2012, 3(4): 1-7.
MAO S J, DENG K B. Complexity of net-centric and service-oriented C4ISR system[J]. Command and Information System and Technology, 2012, 3(4): 1-7.
[10] FORTUNATO S. Damage spreading and opinion dynamics on scale-free networks[J]. Physica A, 2005,348(2):683-690.
[11] 邱曉剛,張鵬.面向平行軍事系統(tǒng)的領(lǐng)域仿真知識工程研究[J].系統(tǒng)仿真學(xué)報,2015,27(8):1665-1670.
QIU X G, ZHANG P. Knowledge engineering in simulation of parallel military system[J]. Journal of System Simulation, 2015,27(8): 1665-1670.
[12] 龔建興,彭勇,郝建國,等. 面向組件的仿真系統(tǒng)構(gòu)建方法研究[J]. 系統(tǒng)仿真學(xué)報, 2010, 22(11): 2575-2578.
GONG J X, PENG Y, HAO J G. Research on component-oriented methodology for constructing simulation system[J]. Journal of System Simulation, 2010, 22(11): 2575-2578.
[13] 杜國紅,韋偉, 李路遙. 作戰(zhàn)仿真實體組件化建模研究[J].系統(tǒng)仿真學(xué)報, 2015,27(2): 234-240.
DU G H, WEI W, LI L Y. Research on component modeling of combat simulation entity[J]. Journal of System Simulation, 2015, 27(2): 234-240.
[14] 杜國紅,李路遙.陸軍合成營作戰(zhàn)仿真組件化模型體系設(shè)計研究[J]. 指揮控制與仿真, 2016,38(2):96-102.
DU G H, LI L Y. Research on component-based model architecture of army synthetic battalion combat simulation[J]. Command and Simulation, 2016, 38(2):96-102.
[15] 張建春,康鳳舉.想定驅(qū)動的組件化模型組合方法研究[J].系統(tǒng)仿真學(xué)報, 2015, 27(8): 1747-1753.
ZHANG J C, KANG F J. Research on scenario-driven component-based model composition method[J]. Journal of System Simulation, 2015, 27(8): 1747-1753.
[16] SZABO C, TEO Y M. An approach to semantic-based model discovery and selection[C]∥Proc.of the IEEE Winter Simulation Conference, 2011:3054-3066.
[17] 鄭世明,史華明. 面向服務(wù)的作戰(zhàn)仿真模型組合建模方法[J].指揮控制與仿真, 2014,36(3):77-79.
ZHENG S M, SHI H M. Method of modeling for model combination on operation simulation oriented services[J]. Command and Simulation, 2014, 36(3): 77-79.
[18] 周東詳. 多層次仿真模型組合理論與集成方法研究[D].長沙:國防科技大學(xué), 2007: 85-95.
ZHOU D Y. Research on multi-level simulation model combination theory and integration method[D]. Changsha: National University of Defense Technology, 2007: 85-95.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
中華手工(2017年2期)2017-06-06 23:00:31
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
中外會展(2014年4期)2014-11-27 07:46:46
中學(xué)數(shù)學(xué)雜志(初中版)(2006年1期)2006-12-29 00:00:00
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
