無刷雙饋電機定子電壓定向的矢量控制策略
2018-04-27 05:06:25段琦瑋
微特電機 2018年2期
關鍵詞:控制策略
段琦瑋,劉 石,龍 騰
(1.華北電力大學,北京 102206;2.劍橋大學,英國 CB2 1TN)
0 引 言
風能是一種重要的可再生能源。近年來,有關風力發電的研究在世界上受到了非常廣泛的關注。目前,風力發電是最主要的風能利用途徑。由于具有較高的安全性、穩定性以及只需要較小容量的功率變換器件,雙饋感應發電機(以下簡稱DFIG)廣泛應用于風力發電系統中。DFIG的主要缺陷是由于存在電刷和滑環而使得維護成本增加[1]。無刷雙饋電機(以下簡稱BDFM)由于沒有電刷和滑環,同時還保留了DFIG只需要小容量功率變換器件的優點,被認為在海上風力發電等領域擁有廣闊應用前景[2]。
目前,針對BDFM的控制策略的研究主要有: 功率繞組(以下簡稱PW)磁場定向矢量控制[3-5]、直接轉矩控制[6]、間接轉矩控制[7-8]、直接功率控制[9]等幾種。其中,矢量控制是BDFM的控制領域中應用最廣泛的控制方法。ZHOU D首先提出了轉子磁鏈定向模型并應用到BDFM的控制中,此控制策略因為需要控制PW和控制繞組(以下簡稱CW)之間的相位角差導致控制算法比較復雜[10-13]。之后POZA和SHAO Shiyi分別提出了PW磁鏈定向的矢量控制策略,但是此控制策略性能受磁鏈位置角的觀測精度影響很大[3-5,14]。劍橋大學的研究團隊在2013年基于統一矢量模型的研究[15-19]提出了PW電壓定向的矢量控制方法,但此控制方法無法實現無功功率的控制。
本文基于BDFM的統一矢量模型提出了PW電壓定向的矢量控制策略,并給出了詳細的理論推導過程。此控制策略可以實現轉速和無功功率的解耦控制。之后基于一臺極對數比為4∶1的無刷雙饋樣機進行了電機試驗研究。試驗結果表明了該控制系統可以實現轉速和無功功率的單獨控制,并且具有良好的魯棒性,表明了此控制策略可以應用于風力發電系統中。
1 PW電壓定向的統一矢量模型方程
BDFM PW電壓定向的統一矢量模型方程如下[18]:
(1)
(2)
(3)
(4)
(5)
(6)
(7)
式中:自由變量η和γ以及PW、CW和轉子各變量的坐標定位角θs1,θs2,φr由下式給出:
(8)
式中:下標s1,s2,r分別為PW,CW和轉子繞組的量;V,I,Λ,M,L分別為電壓、電流、磁鏈、互感及自感矩陣矢量;ω,R,R,Ll,L,p分別為電壓頻率、電阻值、電阻矩陣、漏磁電感值、互感值、極對數;N為轉子的同心回路數;Te為電機電磁轉矩;ζ為兩定子繞組A相軸線的機械位置角度差;上標“*”表示取變量的共軛;上標“t”表示取矩陣的轉置;Re為取變量的實部[20]。θ1為PW電壓位置角。
根據定子電壓定向坐標系的原理可知:
(9)
(10)
由于PW直接連接電網,因此其幅值和頻率可認為保持不變,即|Vs1|和ω1為定值。
2 矢量控制器設計
2.1 控制理論
2.1.1 轉速的控制
由磁鏈方程式(4),式(5)和式(6)可得到定子和轉子的電流矢量表達式:
(11)

式(11)進一步變形計算:
(12)






式(4), 式(5)和式(12)代入式(7)可得到電磁轉矩Te的方程:
Te=GIm {Λs1Is1}
(13)
式(10)代入式(13)可得:
(14)
由式(14)可知,轉矩可由PW的d軸電流單獨控制。
由于轉速可由電磁轉矩直接控制[4],因此BDFM的轉速可由Ids1直接控制。
2.1.2 無功功率的控制
BDFM無功功率的表達式如下式:
(15)
將式(9)代入式(15)得:
(16)
由式(16)可知,無功功率可由PW的q軸電流單獨控制。
2.2 Is2表達式
由式(10),式(11)和式(12)可得:
[Gr-(Lr-Mr)Gi]
(17)
由式(17)可得:
(18)



式中:C1,C7,G3,Gc∈常數;C2,C3,C8,G4∈1×N階常數矩陣;C6,G2,G7;Gi,Gr∈N×1階常數矩陣;C4,C5;G1,G5,G6∈N×N階常數矩陣。
2.3 Vs2表達式
由式(2),式(9)和式(12)可得:
(19)
因此由式(19)可得:
(20)

2.4 矢量控制系統
將式(18)和式(20)代入式(14)和式(26)得:
(21)
由式(21)可給出轉速控制環和無功功率控制環,如圖1所示。
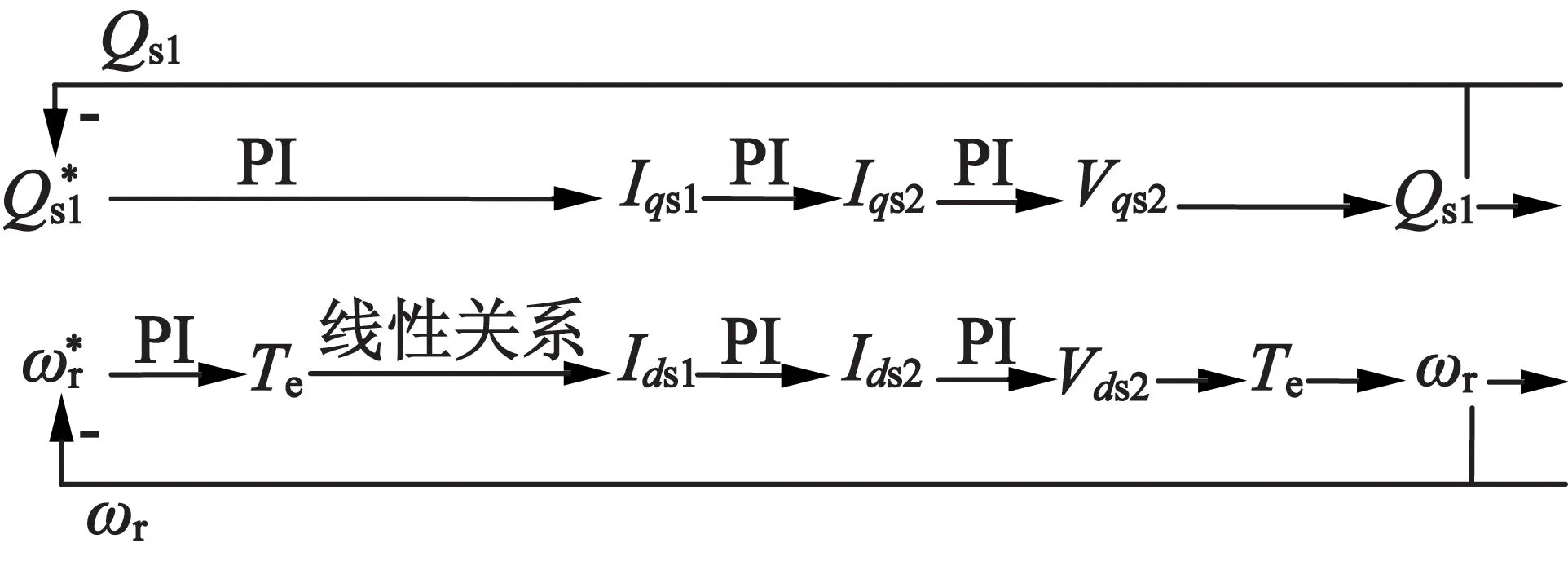
圖1 轉速和無功功率控制環
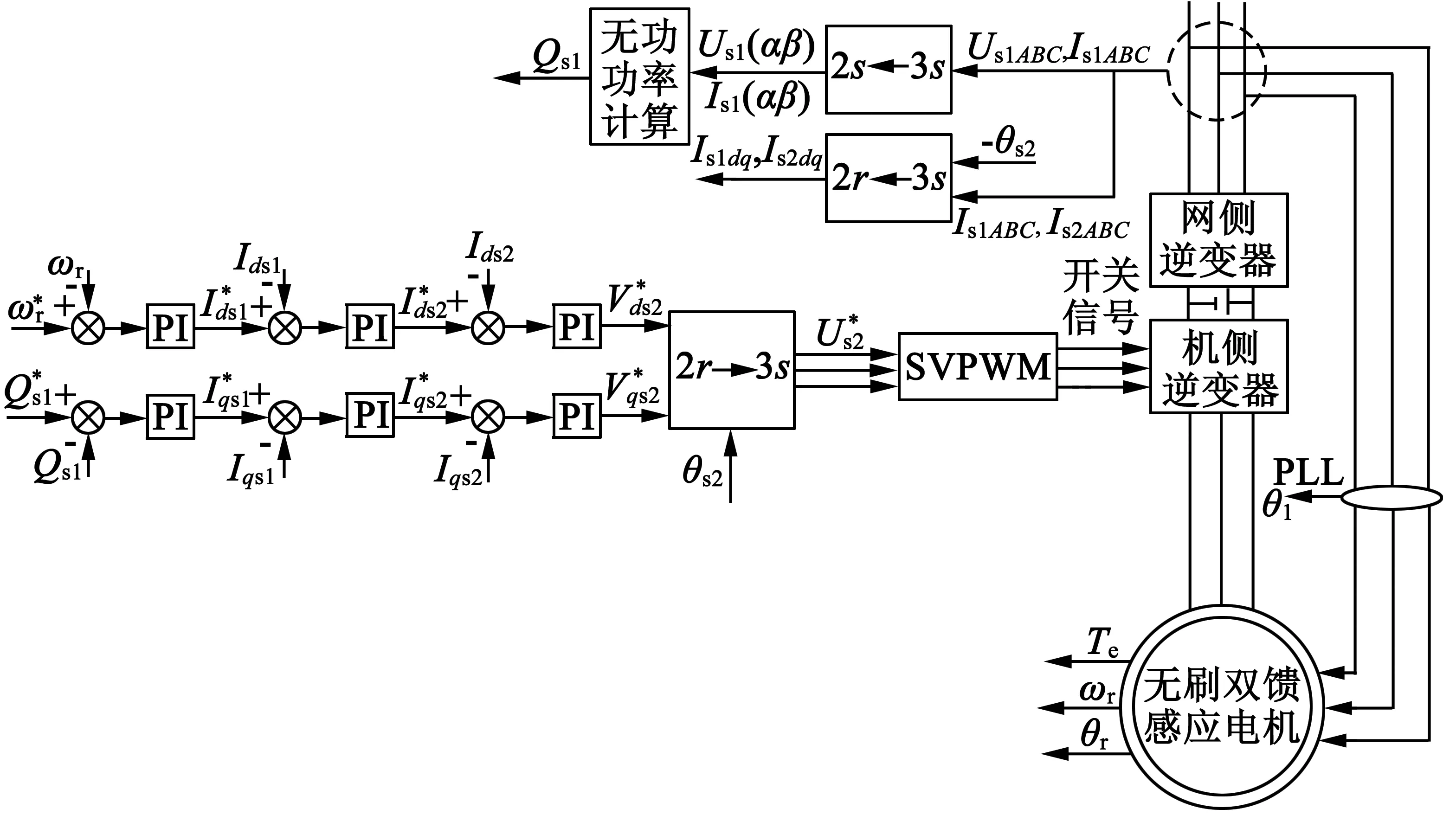
圖2 PW電壓定向的矢量控制系統框圖
圖2為BDFM PW電壓定向的矢量控制系統框圖。由轉速和無功功率的參考值可以分別給定Vds2和Vqs2的參考值,然后通過SVPWM模塊產生開關信號來控制CW側的逆變器。要注意的是,轉速環和無功功率環分別由d軸和q軸的電壓和電流量控制,同之前的矢量控制方法不同[3-4,15,21]。
3 試驗研究
為了驗證所提出的矢量控制策略的性能,搭建了變頻調速試驗平臺進行試驗研究。試驗樣機的參數已在文獻[20]中給出。試驗所用控制器件為兩塊DSP控制板(TMS320F28335),分別控制網側逆變器和機側逆變器。一臺直流電機跟BDFM樣機通過聯軸器連接以提供所需負載轉矩。轉速和轉子位置角由增量式編碼器測定。PW的電壓位置角由鎖相環(PLL)得到。
3.1 轉速變化試驗
圖3為無功功率給定值為0,轉速給定值在720 r/min (超同步運行)和480 r/min (亞同步運行)變化時無功功率,轉矩,Ids1,Ids2,Vds2,Iqs1,Iqs2,Vqs2的響應波形。
由圖3(a)可知,轉速控制器可以穩定快速地跟隨轉速變化值。由圖3(d)可知,無功功率在轉速變化時有擾動但很快可以恢復為0。由圖3(c)和圖3(e)可以看出,Ids1,Ids2,Vds2的值都有變化,以補償轉速的擾動;Iqs1,Iqs2的值基本保持不變,而Vqs2的值有擾動,原因是受到了Vds2的耦合作用。
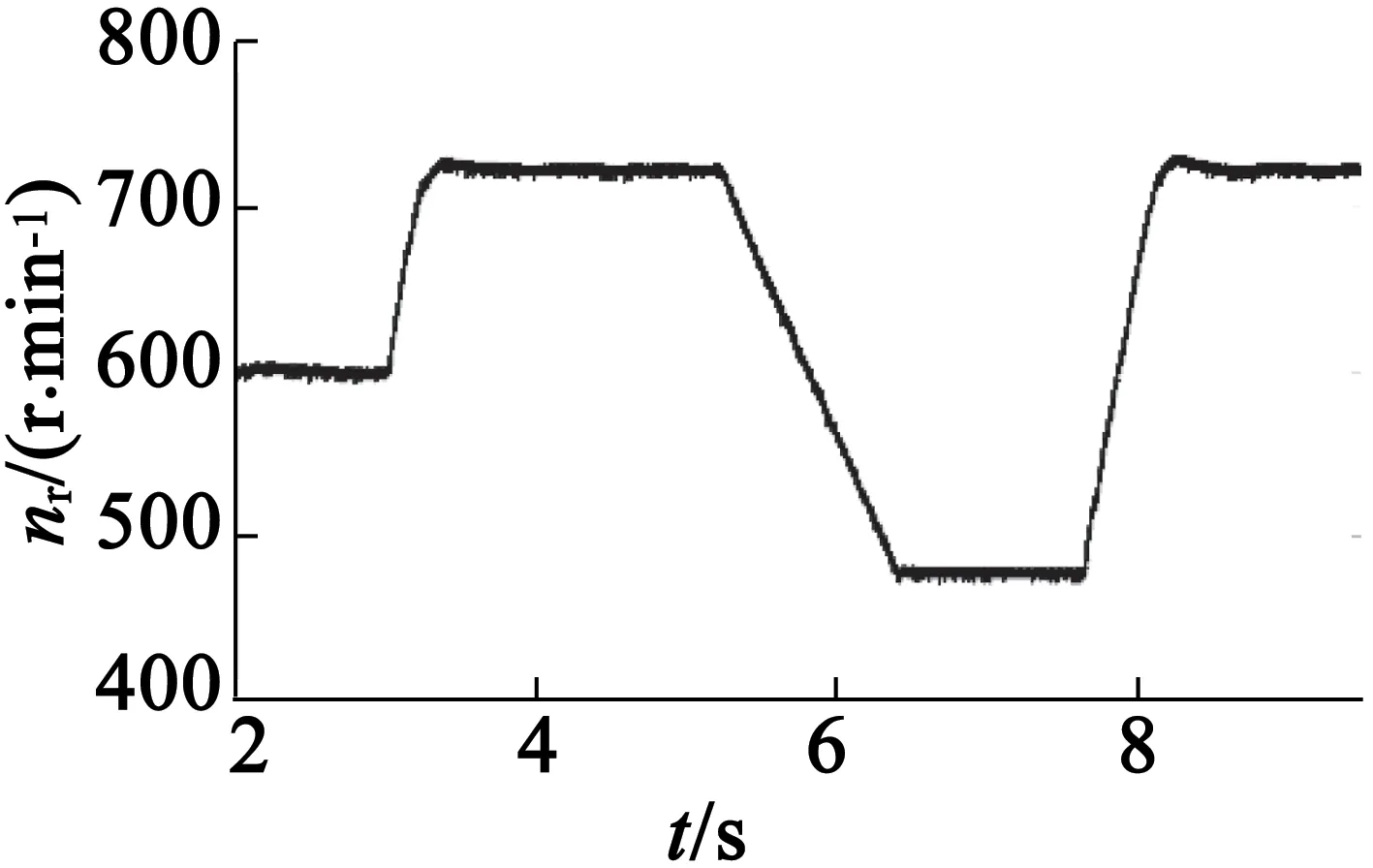
(a) 轉速
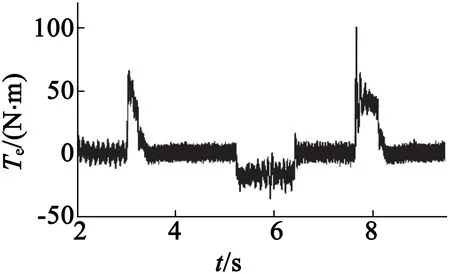
(b) 轉矩

(c) Ids1,Ids2,Vds2
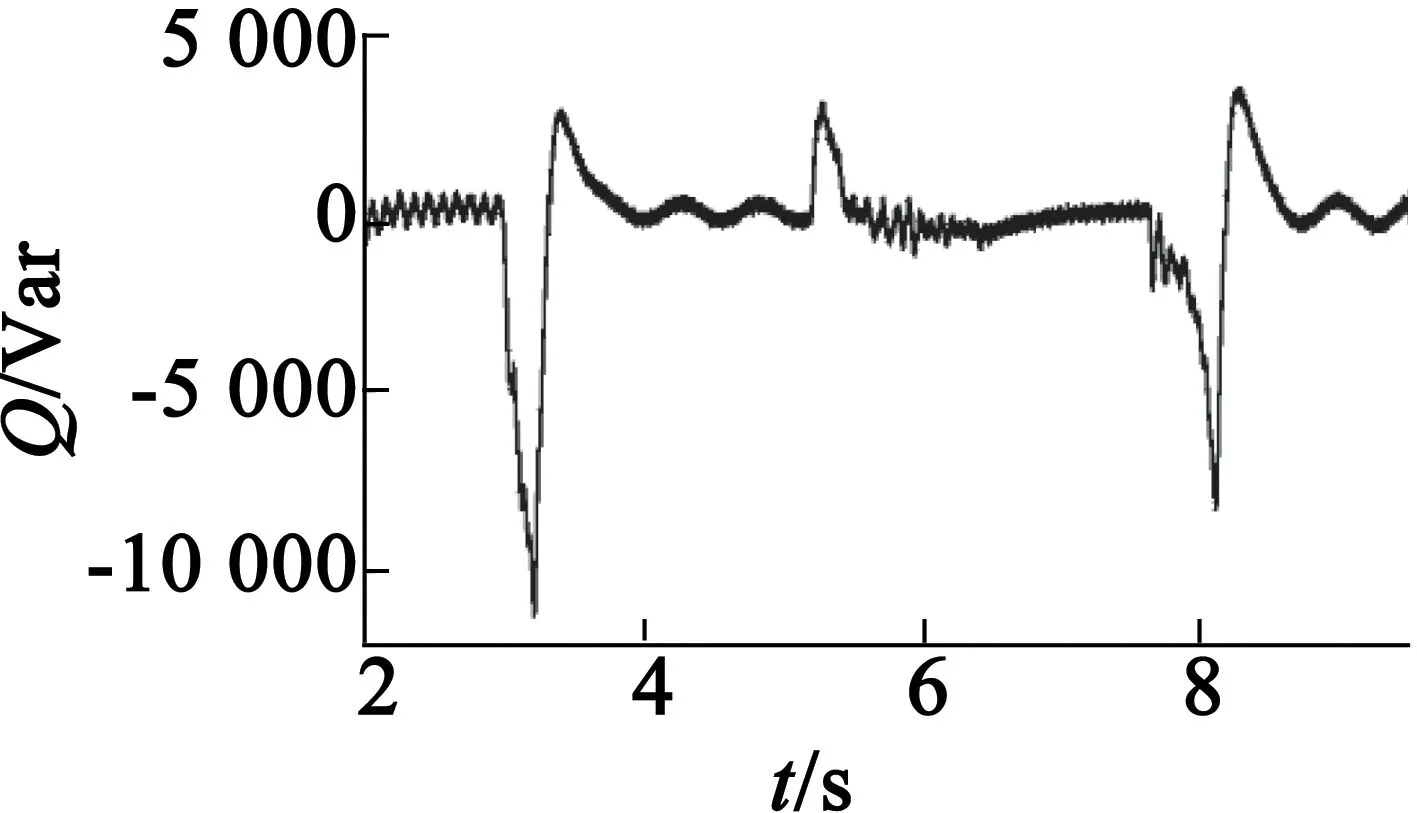
(d) 無功功率
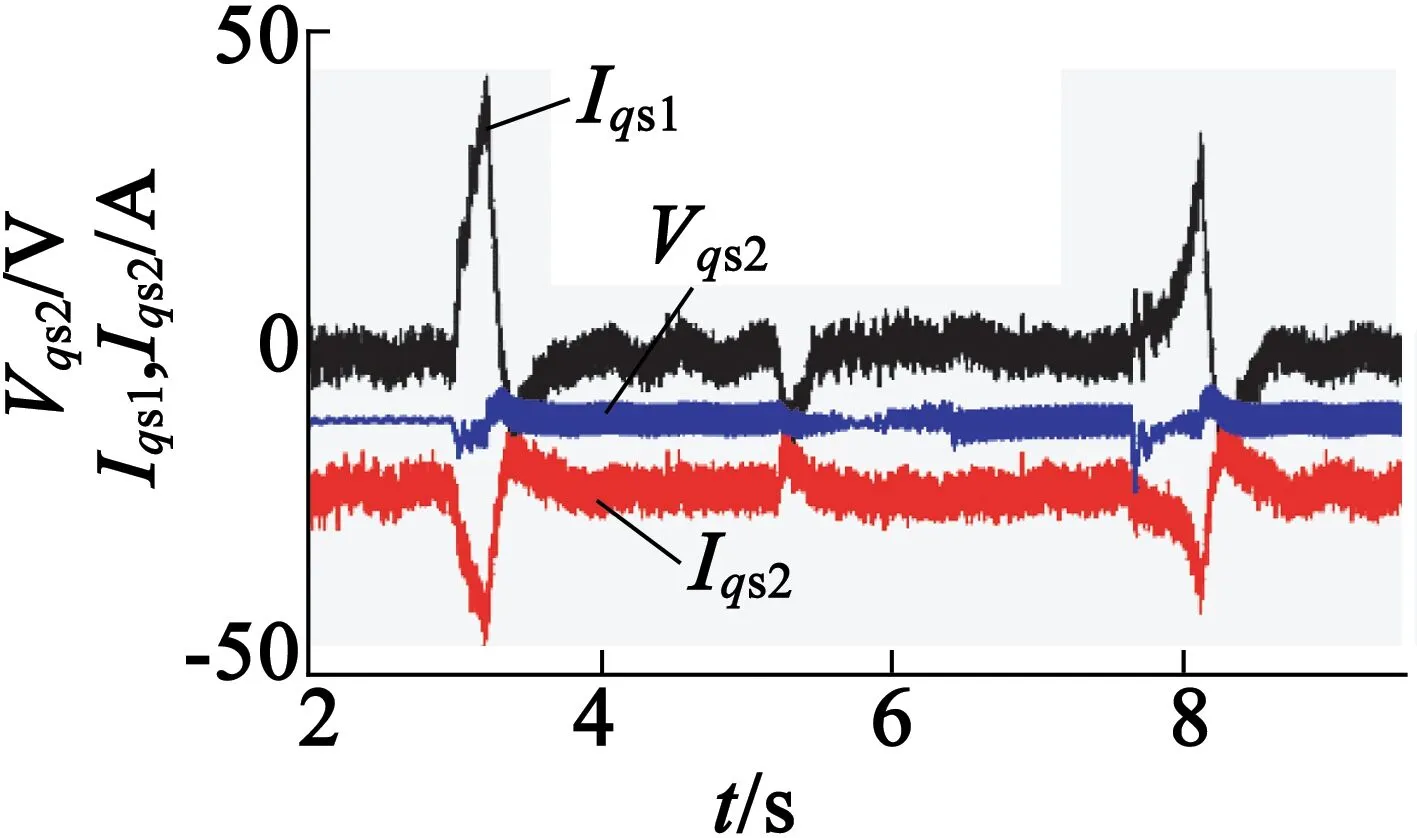
(e) Iqs1,Iqs2,Vqs2
3.2 無功功率變化試驗
圖4為電機轉速給定為675 r/min,無功功率變化時轉速,轉矩,Ids1,Ids2,Vds2,Iqs1,Iqs2,Vqs2的響應波形。無功功率參考值設定: 0~2 s為-2 000 Var,2~4 s為2 000 Var,4~6 s為-2 000 Var。
如圖4(a)所示,無功功率控制器可以控制無功功率快速跟隨給定值的變化,同時可以控制PW吸收或輸出無功功率。如圖4(c)所示,電機轉速約有5 r/min的變化。由圖4(b)和圖4(d)可以看出,Iqs1,Iqs2,Vqs2的值都有變化,以補償無功功率的擾動;Ids1,Ids2的值基本保持不變,而Vds2的值有擾動,原因是受到了Vqs2的耦合作用。
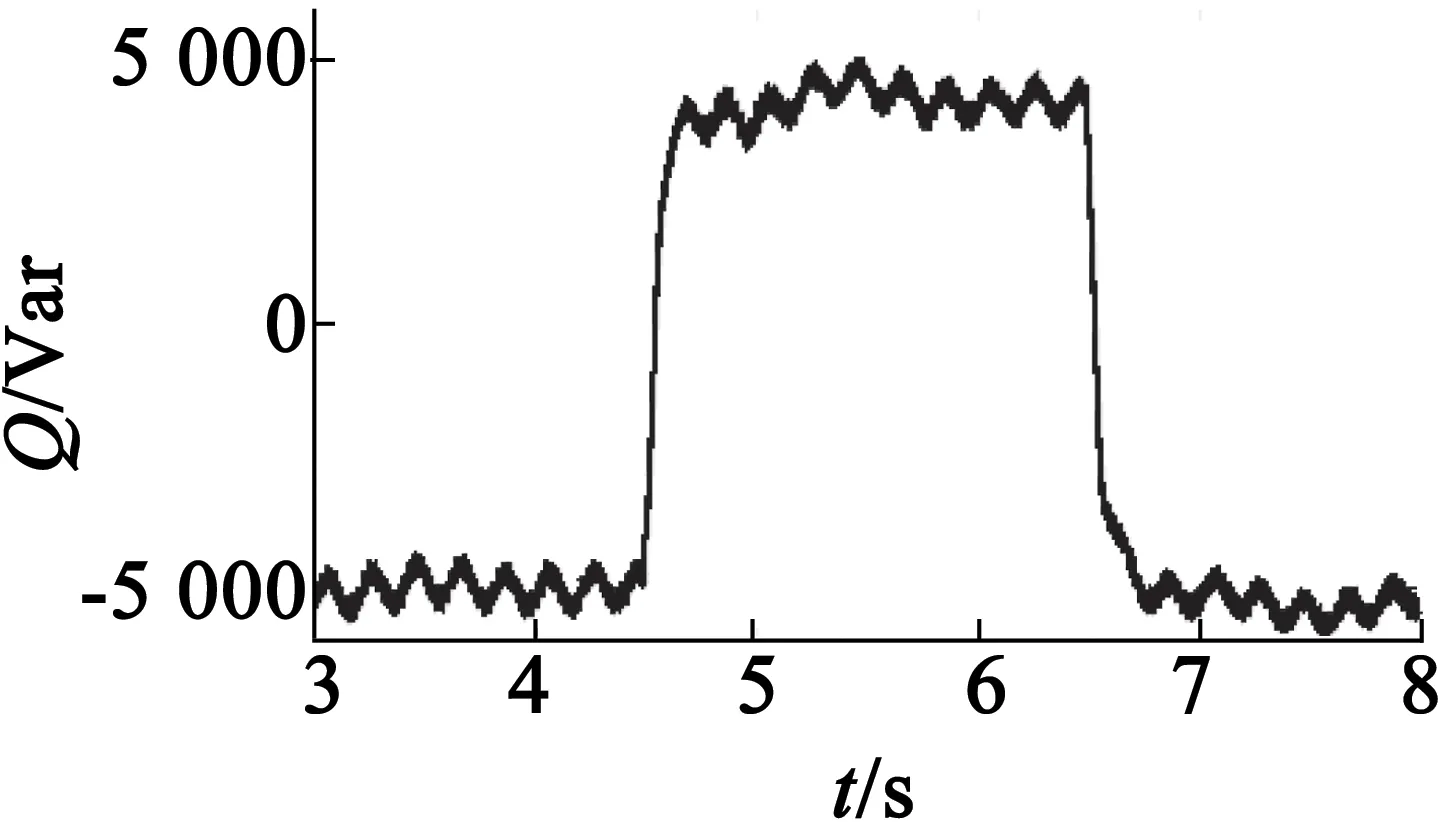
(a) 無功功率
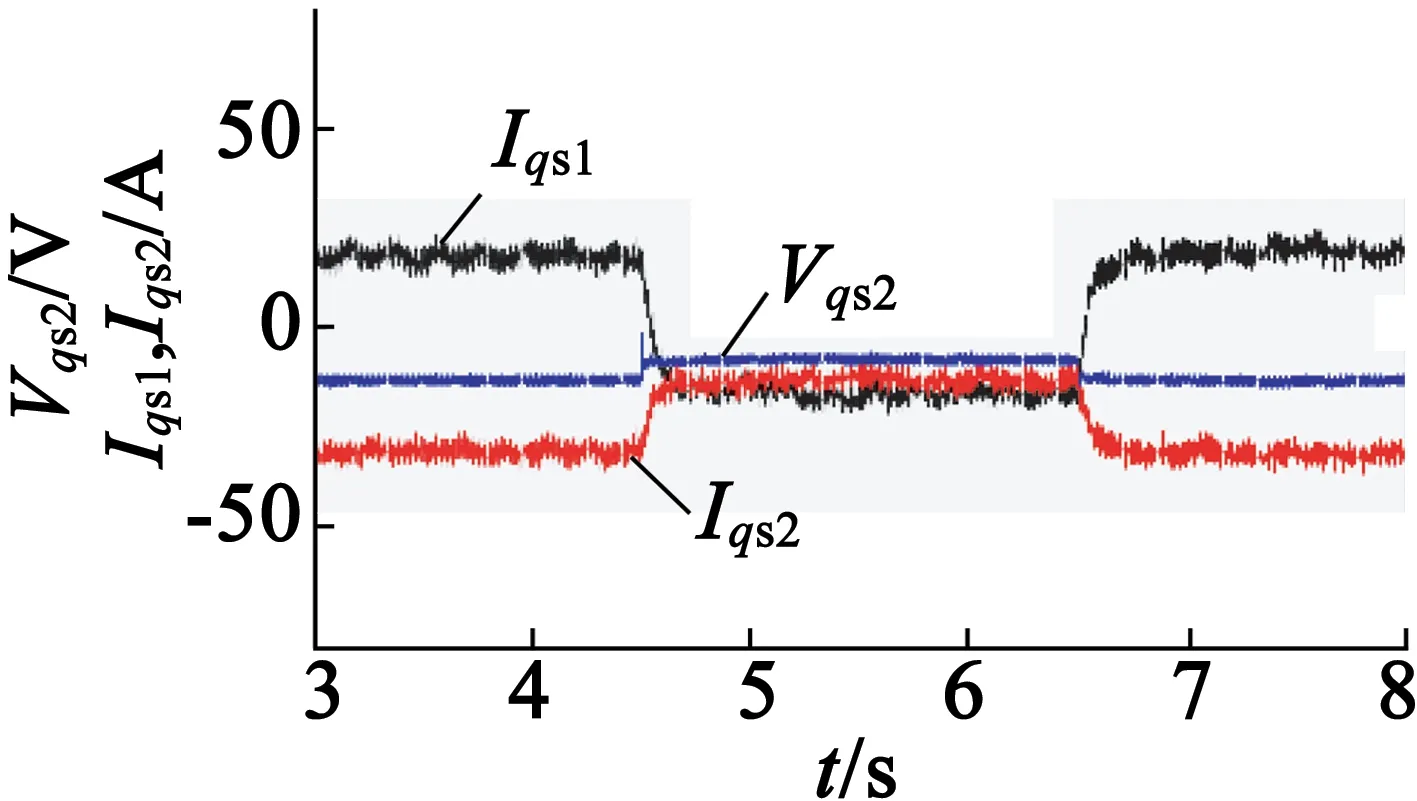
(b) Iqs1,Iqs2,Vqs2
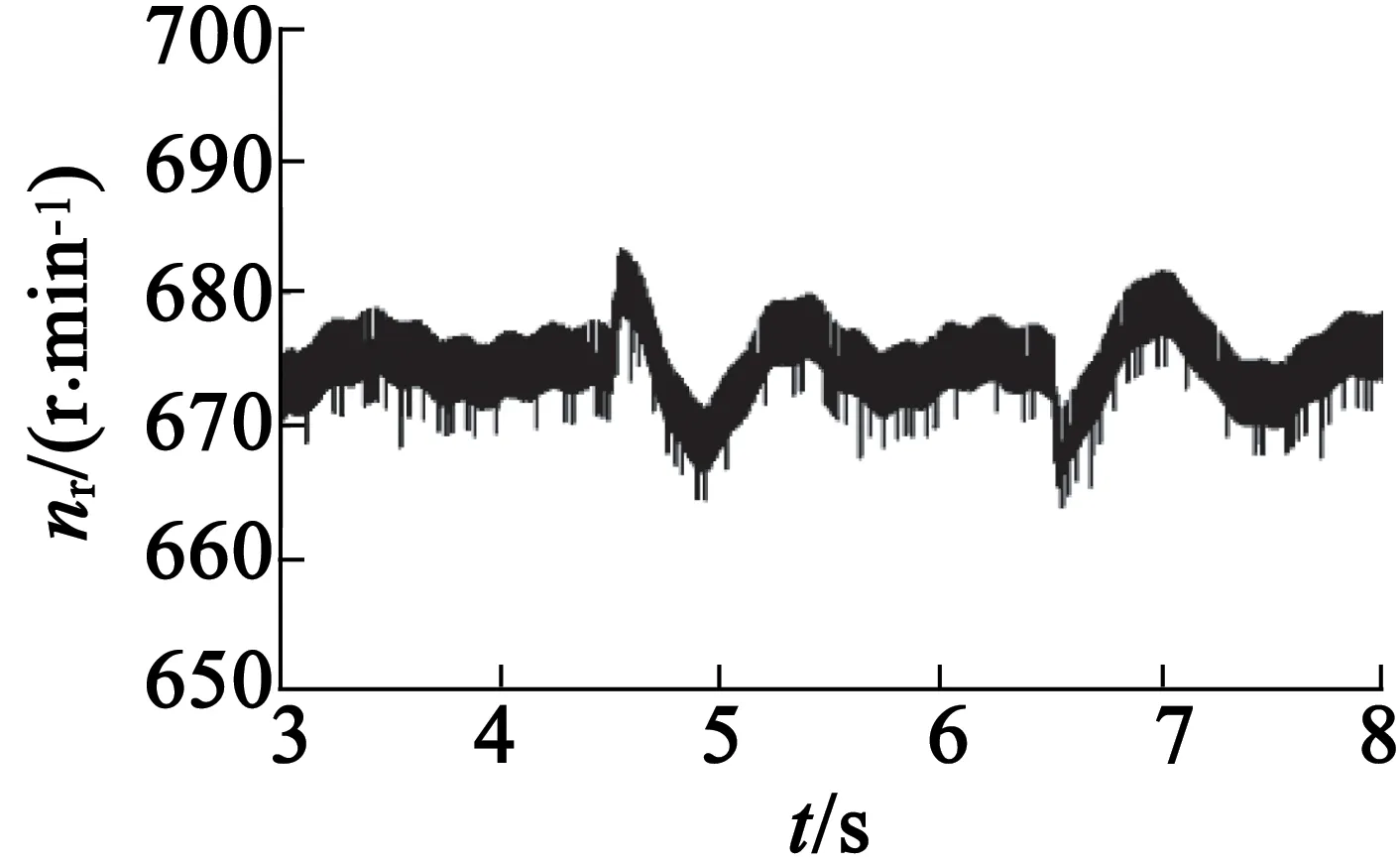
(c) 轉速
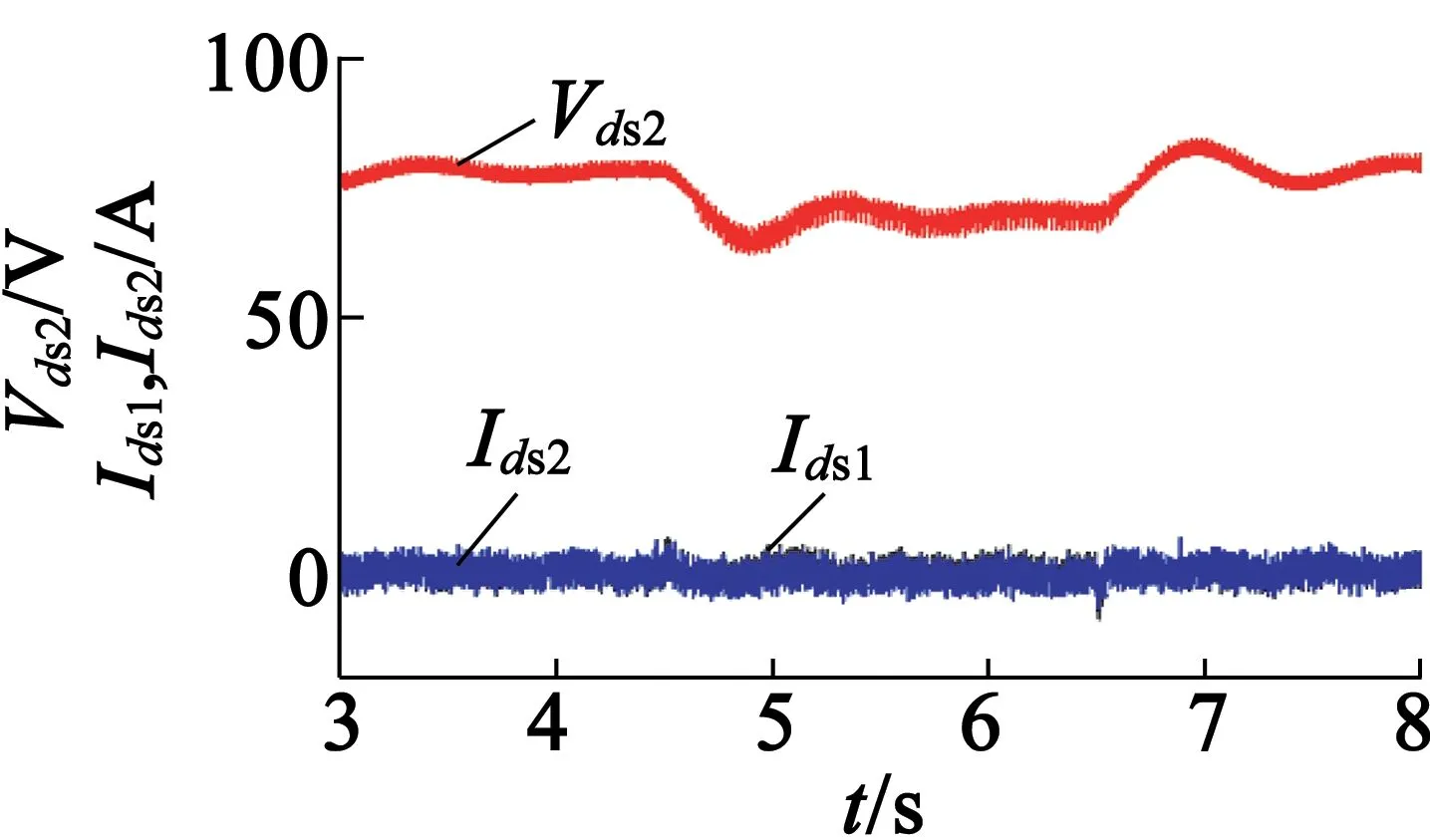
(d) Ids1,Ids2,Vds2
(e) 轉矩
3.3 負載轉矩階躍變化試驗
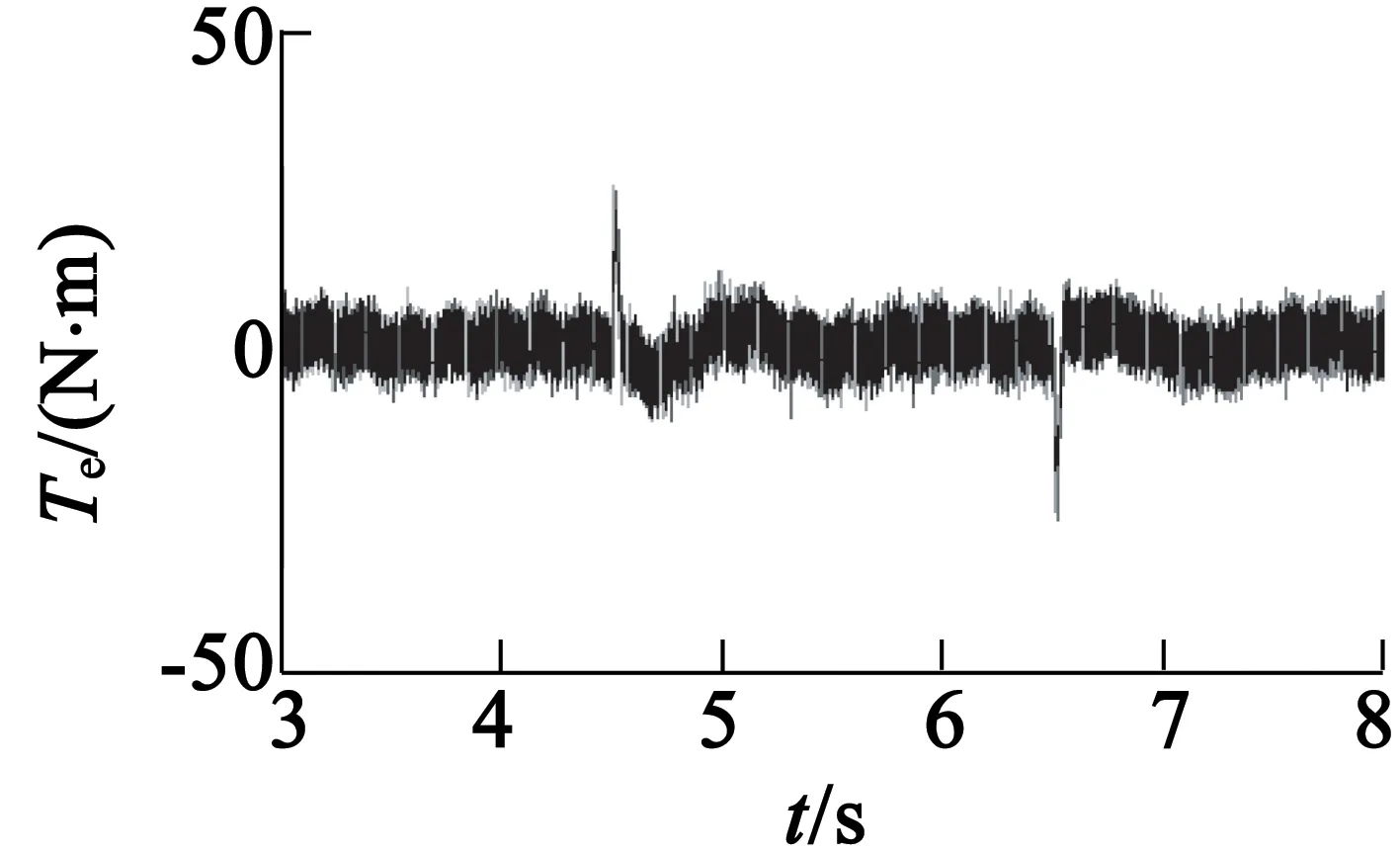
圖5為電機轉速給定為675 r/min,無功功率給定值為0,負載轉矩變化時的轉矩,轉速,無功功率,Ids1,Ids2,Vds2,Iqs1,Iqs2,Vqs2的響應波形。負載轉矩給定值: 0~2.5 s為空載,2.5~4.5 s為103 N·m,4.5~6.3 s為空載。
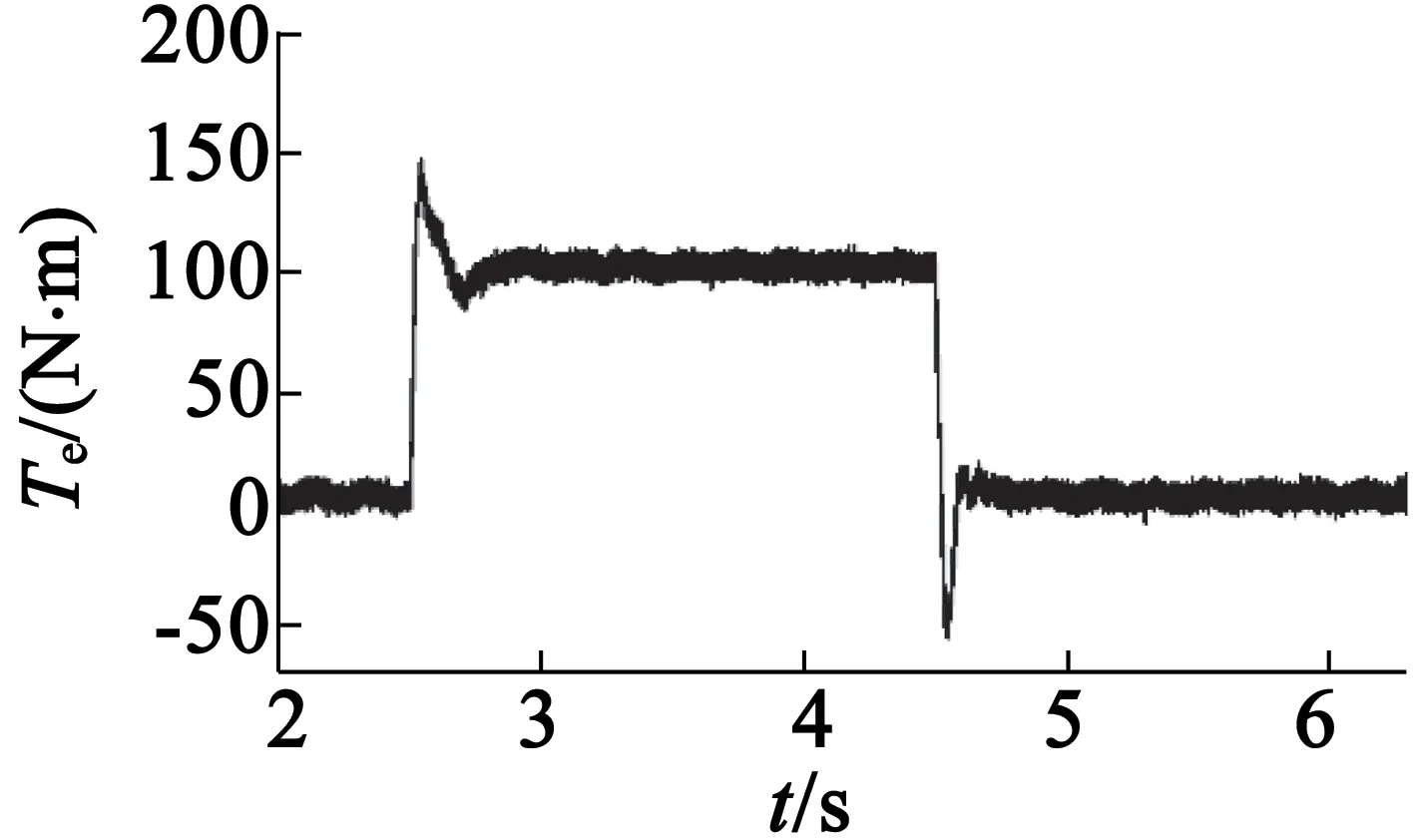
(a) 轉矩
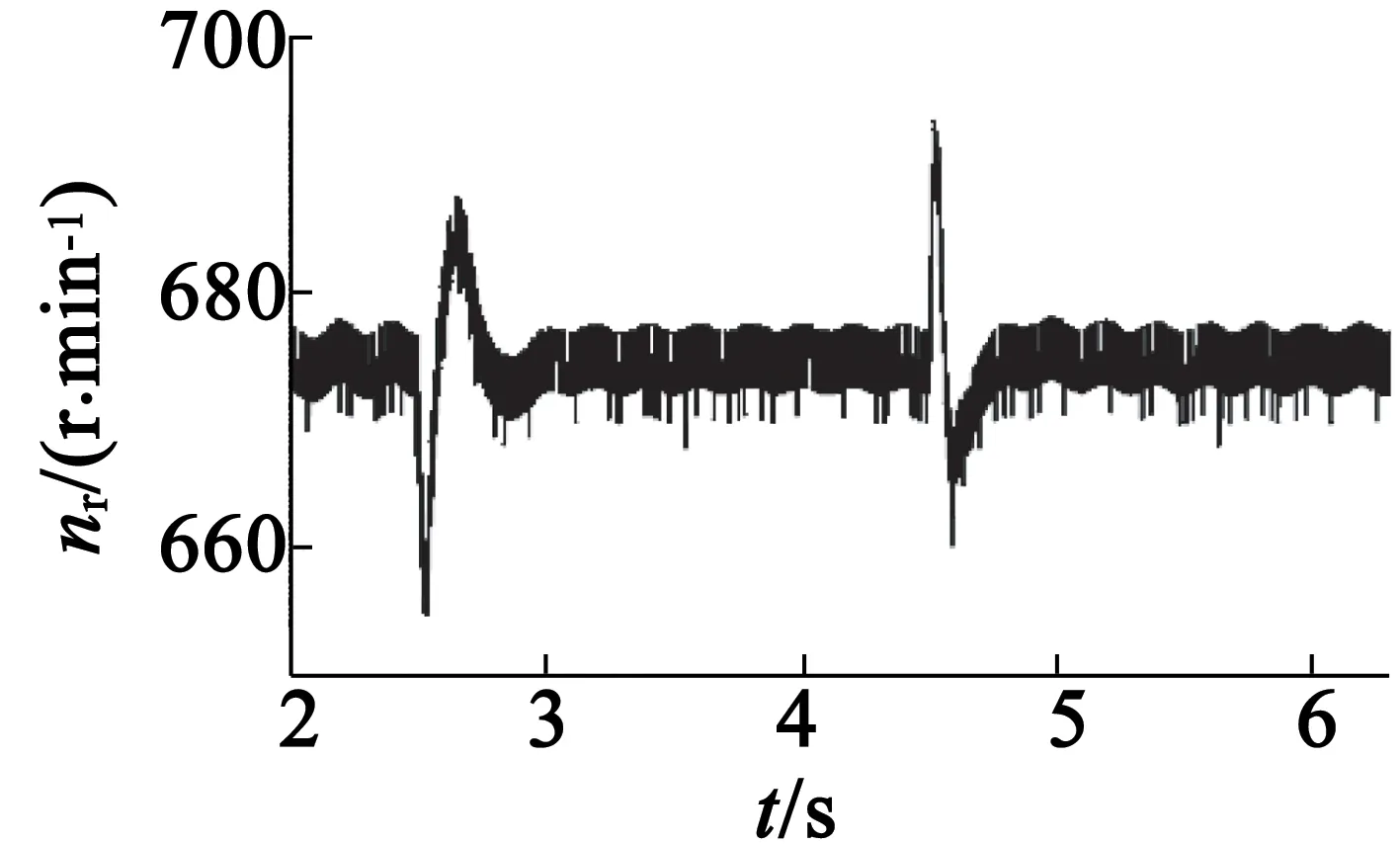
(b) 轉速
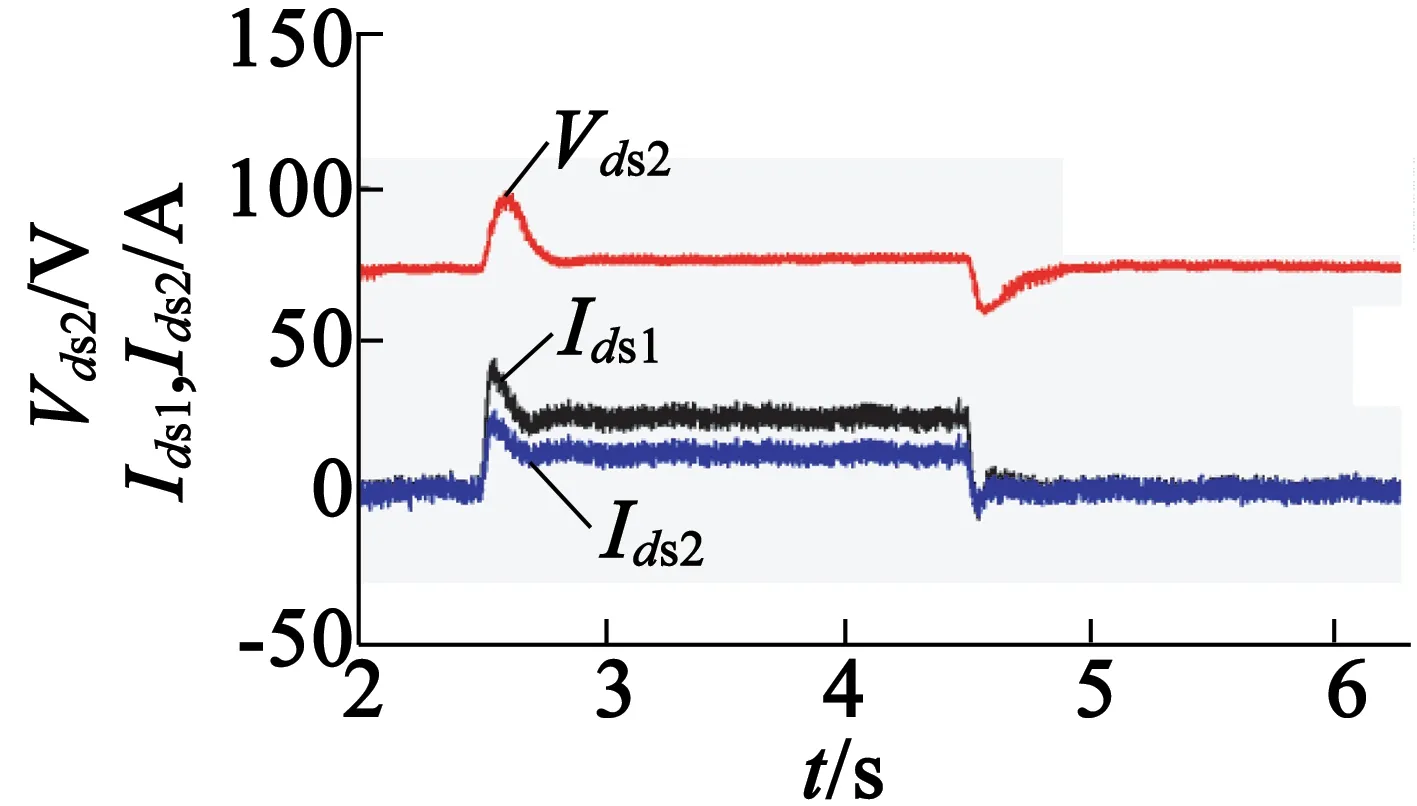
(c) Ids1,Ids2,Vds2
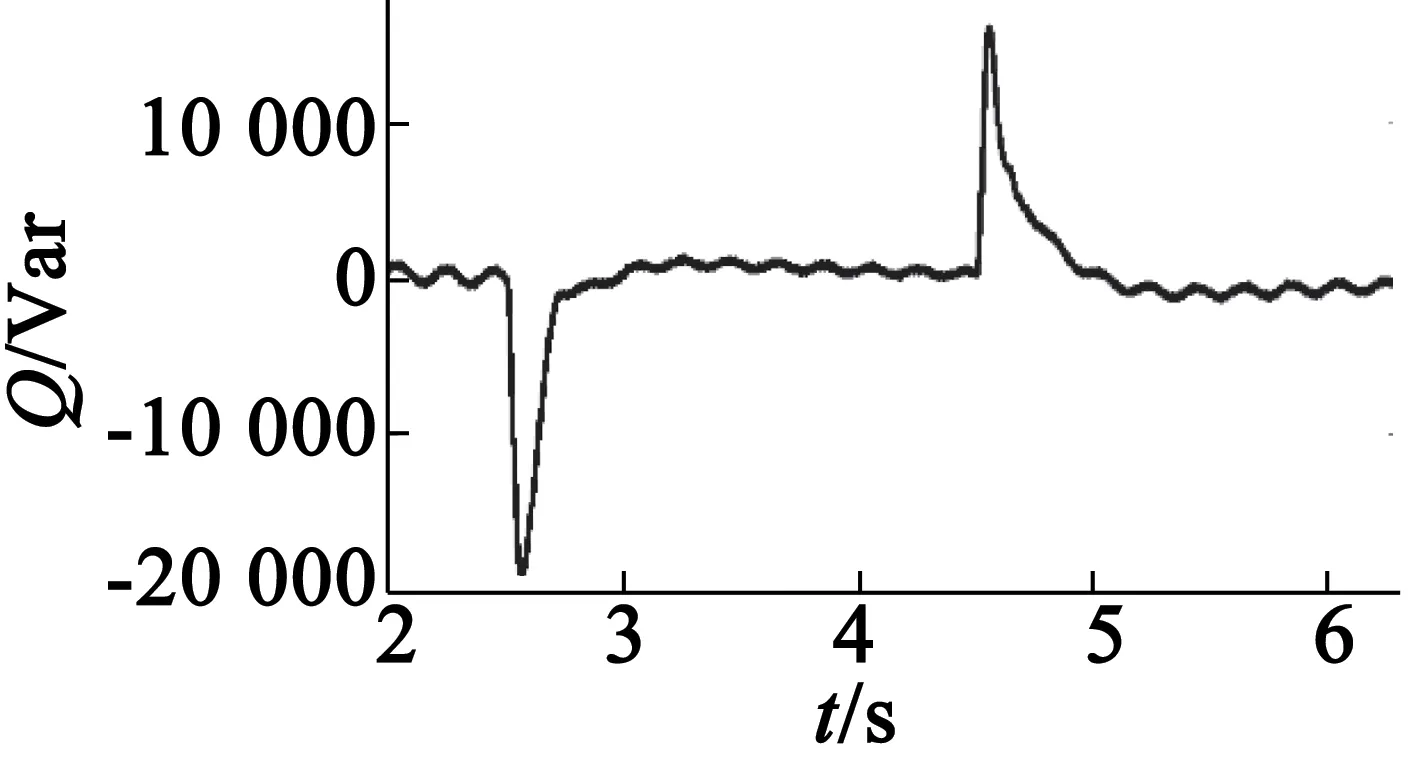
(d) 無功功率

(e) Iqs1,Iqs2,Vqs2
如圖5(a)和圖5(b)所示,負載轉矩變化時,轉速發生微小擾動然后可以快速回到給定值。無功功率出現了較大的擾動,說明了轉速/轉矩控制環對無功功率控制環的耦合較大。
4 結 語
本文在BDFM的統一矢量模型的基礎上提出了具有轉速控制環和無功功率控制環的矢量控制系統,并給出了詳細的理論推導。控制策略由在BDFM的變頻調速實驗平臺上進行了試驗研究。試驗結果表明了在該控制策略下BDFM在轉速、無功功率、轉矩信號給定值變化擾動時可以保持穩定運行。下一步將針對兩控制環之間的交叉耦合問題進行補償模塊的研究。
[1] SANTISTEBAN J A,STEPHAN R M.Vector control methods for induction machines:An Overview[J].IEEE Transactions on Education,1995,28(18):147-151.
[2] MCMAHON R A,ROBERTS P C,WANG X.Performance of BDFM as generator and motor[J].Electric Power Applications, IEE Proceedings -,2006,153(2):289-299.
[3] SHAO S,ABDI E,BARATI F.Stator-flux-oriented vector control for brushless doubly fed induction generator[J].IEEE Transactions on Industrial Electronics,2009,56(10):4220-4228.
[4] POZA J,OYARBIDE E,SARASOLA I.Vector control design and experimental evaluation for the brushless doubly fed machine[J].Iet Electric Power Applications,2009,3(4):247-256.
[5] SHAO S,ABDI E,MCMAHON R.Vector control of the brushless doubly-fed machine for wind power generation[C]//IEEE International Conference on Sustainable Energy Technology.IEEE,2009:322-327.
[6] SARASOLA I,POZA J,RODRIGUEZ M A.Direct torque control for brushless doubly fed induction machines[C]//IEEE International Electric Machines & Drives Conference, 2007:1496-1501.
[7] ZHAO R,ZHANG A,MA Y.The dynamic control of reactive power for the brushless doubly fed induction machine with indirect stator-quantities control scheme[J].IEEE Transactions on Power Electronics,2015,30(9):5046-5057.
[8] ZHANG A,WANG X,JIA W.Indirect stator-quantities control for the brushless doubly fed induction machine[J].IEEE Transactions on Power Electronics,2014,29(3):1392-1401.
[9] ZHANG X,SHU J,WU J.Decoupled power control based on the ADRC for brushless doubly-fed machine[J].Acta Energiae Solaris Sinica,2008(12):1477-1484
[10] ZHOU D,SPEE R,ALEXANDER G C.Experimental evaluation of a rotor flux oriented control algorithm for brushless doubly-fed machines[J].IEEE Transactions on Power Electronics,1997,12(1): 913-919.
[11] ZHOU D,SPEE R,ALEXANDER G C.A simplified method for dynamic control of brushless doubly-fed machines[C]//Conference of the IEEE Industrial Electronics Society, 1996:946-951.
[12] ZHOU D,SPEE R.Field oriented control development for brushless doubly-fed machines[C]//IAS Meeting, 1996:304-310.
[13] SPEE R,WALLACE A K,LAUW H K.Performance simulation of brushless doubly-fed adjustable speed drives[C]//Industry Applications Society Meeting,1989:738-743.
[14] ZHANG F,YU S,WANG X.Research of a novel brushless doubly-fed generator with hybrid rotor[J].IEEE Transactions on Applied Superconductivity, 2016,26(7):1-5.
[15] BARATI F,MCMAHON R,SHAO S.Generalized vector control for brushless doubly fed machines with nested-loop rotor[J].IEEE Transactions on Industrial Electronics,2013,60(6):2477-2485.
[16] BARATI F,ORAEE H,ABDI E.Derivation of a vector model for a brushless doubly-fed machine with multiple loops per nest[C]//IEEE International Symposium on Industrial Electronics, 2008: 606-611.
[17] BARATI F,ORAEE H,ABDI E.The brushless doubly-fed machine vector model in the rotor flux oriented reference frame[C]//Conference of the IEEE Industrial Electronics Society , 2008: 1415-1420.
[18] BARATI F,SHAO S,ABDI E.Generalized vector model for the brushless doubly-fed machine with a nested-loop rotor[J].IEEE Transactions on Industrial Electronics,2011,58(6):2313-2321.
[19] BROEKHOF A,MCMAHON R,MACIEJOWSKI J.Reference frame re-alignment for vector control of the brushless doubly-fed machine[C]//Control Conference:2013:4580-4585.
[20] 段琦瑋,劉石,龍騰.統一矢量模型的無刷雙饋電機的轉速控制[J].自動化儀表,2017,38(6):1-5.
[21] ADEMI S,JOVANOVIC M G.Vector control methods for brushless doubly fed reluctance machines[J].IEEE Transactions on Industrial Electronics,2015,62(1):96-104.
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36