模糊自適應(yīng)PID控制在電阻爐溫控中的應(yīng)用仿真
2018-04-29 07:54:37華磊張成濤陸文祺王佳奇
廣西科技大學學報 2018年1期
華磊 張成濤 陸文祺 王佳奇
摘 要:電阻爐是一個具有工作參數(shù)隨爐溫變化而變化的受控對象,具非線性和大滯后的特性,很難建立其精確的數(shù)學模型.本文設(shè)計了一種電阻爐溫模糊自適應(yīng)PID控制器硬件系統(tǒng)及控制邏輯,首先將電阻爐溫度模型等效為一階慣性滯后環(huán)節(jié),根據(jù)系統(tǒng)誤差e和誤差變化率 ec 作為系統(tǒng)的輸入量,然后采用一種模糊自適應(yīng)PID控制方法,對PID的參數(shù)進行在線自動調(diào)整.為了驗證設(shè)計系統(tǒng)的合理性,通過軟件MATLAB對整個控制系統(tǒng)進行建模和仿真.仿真結(jié)果表明:設(shè)定電阻爐控制爐溫為100 ℃時,采用傳統(tǒng)的PID控制算法超調(diào)量為18.5%,經(jīng)過 600 s達到穩(wěn)態(tài);而采用模糊自適應(yīng)PID控制算法的超調(diào)量基本為零,達到穩(wěn)態(tài)時間為300 s,由此說明模糊自適應(yīng)PID控制算法響應(yīng)快、達到穩(wěn)態(tài)時間短且穩(wěn)態(tài)效果好;在仿真時間第600 s的時候?qū)煞N不同電阻爐爐溫控制系統(tǒng)添加一個-5 ℃的干擾信號,模糊自適應(yīng)PID控制系統(tǒng)波動小、恢復(fù)穩(wěn)態(tài)時間短,說明其抗干擾能力強、魯棒性好;因此,通過本文研究表明:將模糊自適應(yīng)PID控制算法應(yīng)用在電阻爐溫度控制中,控制效果好、實用價值高.
關(guān)鍵詞:電阻爐;溫度控制;模糊自適應(yīng)控制;Matlab仿真
中圖分類號:TM924 DOI:10.16375/j.cnki.cn45-1395/t.2018.01.007
0 引言
目前,在工業(yè)生產(chǎn)控制系統(tǒng)中廣泛的運用比例、積分和微分故稱之為PID控制器[1],常規(guī)PID控制算法簡單,適用于能夠建立精確數(shù)學模型的線性控制系統(tǒng).目前國內(nèi)對電阻爐的控制大多數(shù)采用PID控制,因電阻爐具有非線性、大滯后的特性,數(shù)學精確模型建立困難,使得PID控制在電阻爐控制中的效果并不理想.
在電阻爐溫控方法的研究由來已久,李夢瑤[2]通過建立電阻爐的數(shù)學模型,并對常規(guī)PID控制和模糊神經(jīng)網(wǎng)絡(luò)PID控制在MATLAB2007中分別建模仿真得出模糊神經(jīng)網(wǎng)絡(luò)PID控制比傳統(tǒng)的PID控制上升速度快,超調(diào)量小,對外來干擾信號有較好的適應(yīng)性.吳勇[3]通過分析電阻爐的工作原理,設(shè)計溫度反饋信號經(jīng)過濾波、放大信號處理電路并發(fā)送給軟件,進行溫度反饋調(diào)節(jié)在,MATLAB中建模仿真,與傳統(tǒng)PID控制相比其控制效果較好,響應(yīng)速度快,出現(xiàn)較小的穩(wěn)態(tài)誤差.
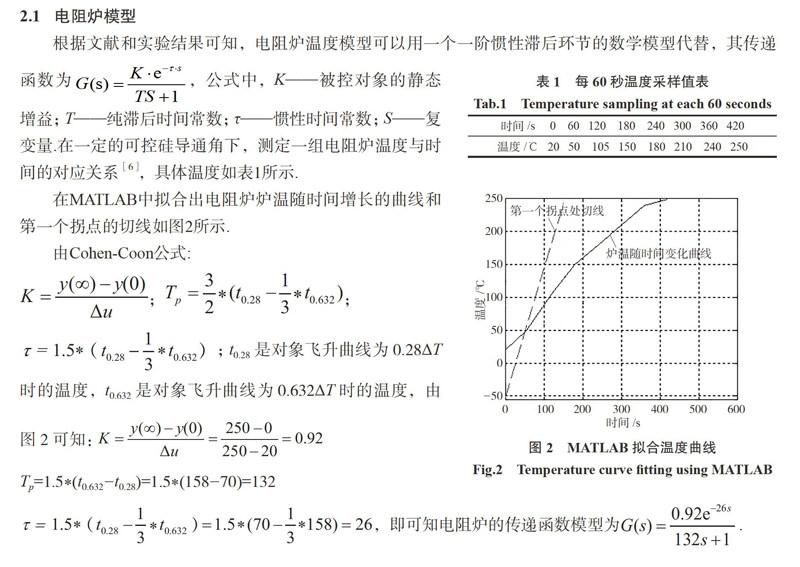
本文采用等時間間隔測取電阻爐爐溫,重復(fù)多次實驗取測量溫度的平均值,由Cohen-Coon公式在MATLAB中擬合得出電阻爐的爐溫傳遞函數(shù)模型,根據(jù)電阻爐爐溫的傳遞函數(shù)在MATLAB/Simulink中建立不同的溫控算法模型,實驗結(jié)果表明將傳統(tǒng)的PID控制算法與模糊控制規(guī)則相結(jié)合,不僅保持了傳統(tǒng)PID的優(yōu)點,而且Kp,Ki,Kd在線自動調(diào)整減少了計算量,抗干擾、穩(wěn)定性、適應(yīng)性等能力比傳統(tǒng)的PID控制能力更強,且無超調(diào)量.
1 系統(tǒng)硬件設(shè)計
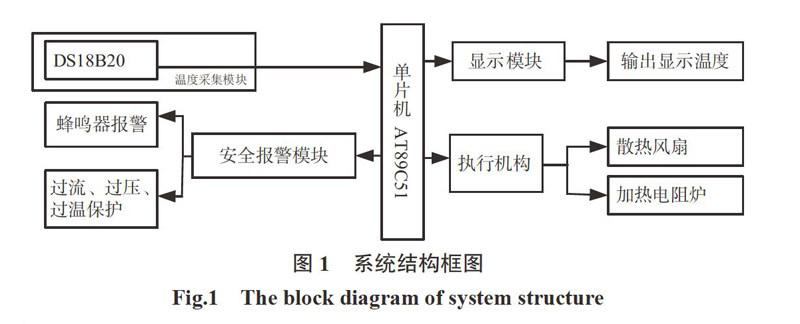
該系統(tǒng)主要以AT89C51單片機為核心,DS18B20溫度傳感器、保護電路、蜂鳴器、散熱風扇、加熱電阻絲和LED屏組成.DS18B20的溫度測試范圍為-55 ℃~125 ℃,分辨率可達0.062 5 ℃,在-10 ℃~80 ℃內(nèi)的精度為±0.5 ℃[4],可以達到實驗溫度控制要求精度,系統(tǒng)的結(jié)構(gòu)框圖如圖 1所示.
系統(tǒng)的工作原理:單片機根據(jù)檢測到實際溫度與設(shè)定溫度的誤差作為輸入量來控制執(zhí)行機構(gòu)加熱電阻爐的電壓大小,以此來控制爐溫,當溫度高于允許設(shè)定值的范圍,單片機通過模糊自適應(yīng)PID控制來調(diào)節(jié)爐溫使其正常工作.當電阻爐出現(xiàn)異常故障時蜂鳴器會發(fā)出刺耳的報警聲并斷電停止工作.
系統(tǒng)的功能特點:1)該實驗可以根據(jù)溫度誤差自動調(diào)節(jié)電阻爐的溫度,確保電阻爐在加熱過程中確保加熱溫度在安全范圍內(nèi);2)該系統(tǒng)具有溫度采集功能和通過LED模塊動態(tài)實時顯示爐溫;3)系統(tǒng)還根據(jù)實際生產(chǎn)安全,設(shè)計了保護電路,防止過流、過壓[5]、溫度過高等保護電路,冗余設(shè)計可以保證電阻爐安全工作;4)硬件采用AT89C51單片機為核心的控制器,軟件設(shè)計為模糊控制.
2 模糊自適應(yīng)PID控制設(shè)計
2.2 自適應(yīng)模糊PID控制器原理及流程
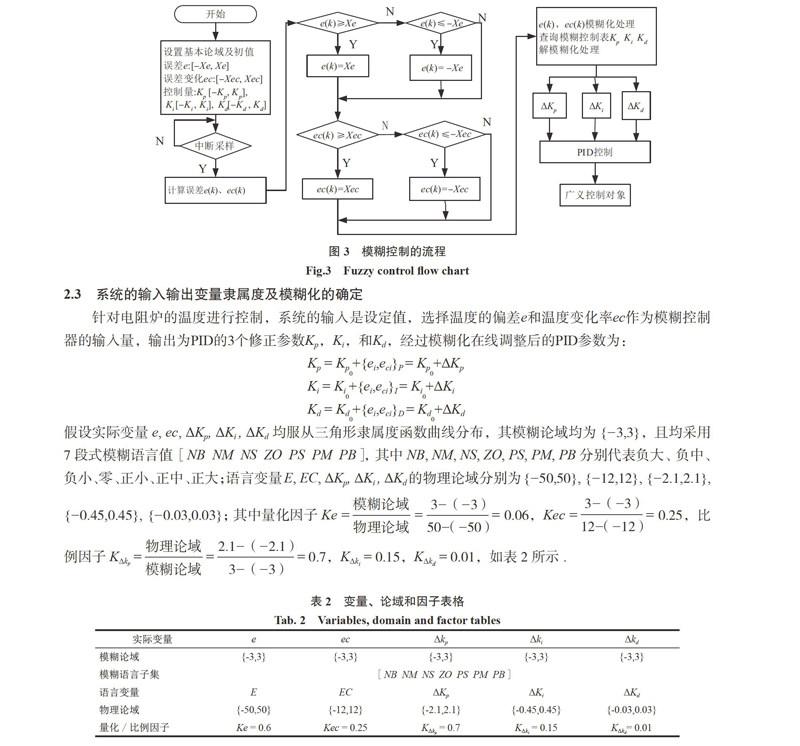
自適應(yīng)模糊控制器由模糊化接口、模糊推理、知識庫和解模糊化等組成[7-8],模糊自適應(yīng)PID控制器,以溫度誤差E和溫度變化率EC為輸入,經(jīng)過量化因子處理變?yōu)槟:浚诮?jīng)過解模糊化在線調(diào)整Kp,Ki,和Kd,因此被控對象具有較好的動態(tài)性和靜態(tài)性,具有計算量小,易于單片機控制的優(yōu)點[9].模糊控制的流程圖如圖3所示.
2.4 自適應(yīng)模糊PID參數(shù)整定基本原則
1) 當系統(tǒng)偏差(|e|)較大時,為使系統(tǒng)盡快消除偏差,不管ec的正負,都應(yīng)該取較大的Kp和Ki,以達到縮小偏差的目的.如果e*ec<0,則應(yīng)取較小的Kd或者為0;反之,e*ec>0,則應(yīng)取較大的Kd,阻止偏差繼續(xù)增大[10].
2) 當系統(tǒng)偏差(|e|)適中時,為防止系統(tǒng)超調(diào)量過大,取較小的Kp,Ki取中等程度的值.如果e*ec<0,則該取較大的Kd,防止系統(tǒng)的超調(diào);反之,e*ec>0,應(yīng)該取適中的Kd,防止偏差繼續(xù)增大[11].
3) 當系統(tǒng)偏差(|e|)較小或者偏差為0時,為縮短系統(tǒng)的調(diào)節(jié)時間,可取適中的Kd,較小的Ki.如果e*ec<0,則應(yīng)取較小的Kd;反之,e*ec>0,應(yīng)該取適中的Kd.此時的Kd不宜過大,否則系統(tǒng)對擾動敏感、震蕩加劇、調(diào)節(jié)時間過長.自適應(yīng)模糊PID控制系統(tǒng)根據(jù)采集爐溫的不同值,選擇輸入語言變量e和溫度變化率ec模糊語言子集[NB,NM,NS,ZO,PS,PM,PB]考慮ΔKp, ΔKi, ΔKd之間的關(guān)聯(lián)[12],響應(yīng)開始的時候以e(t)= y(t)-r(t),其中r(t)為給定輸入量,y(t)為反饋量,規(guī)則描述:以IF E=NB and EC=NB then ΔKp=PB and ΔKi=NB and ΔKd=PS為例描述,當偏差、偏差變化率為負大(NB)時,為使系統(tǒng)盡快消除偏差ΔKp取正大(PB),被控量遠遠小于設(shè)定值,而且以較大的速度在增加偏差,因此要保證積分增加則ΔKi取負大(NB),ΔKd要抑制這種趨勢所以取正小(PS) .由以上基本原則和專家經(jīng)驗可以得出模糊控制器的控制規(guī)則如表3所示.
3 基于MATLAB/simulink的系統(tǒng)仿真模型
基于MATLAB提供的仿真工具箱(Fuzzy Logic Toolbox)建立模糊邏輯推理規(guī)則, 在Command Windows下輸入“fuzzy”命令,并將模糊推理系統(tǒng)取名為mohu.fis保存到工作空間,可將模糊推理系統(tǒng)保存在磁盤上,如圖4所示.在MATLAB中新建一個mdl文件取名為mohu.mdl,電阻爐溫度控制系統(tǒng)的傳遞函數(shù)為,建立如圖5所示的仿真模型圖.兩種不同控制方法仿真的結(jié)果如圖6所示.
從圖5、圖6可知:設(shè)定電阻爐爐溫為100 ℃,仿真時間設(shè)定為1 000 s.模糊自適應(yīng)PID控制系統(tǒng)在300 s的時候達到穩(wěn)態(tài),且一直保持100 ℃,無超調(diào);傳統(tǒng)PID控制系統(tǒng)達到穩(wěn)態(tài)用時600 s,超調(diào)量為18.5%,表明模糊自適應(yīng)PID控制算法響應(yīng)快、達到穩(wěn)態(tài)時間短且穩(wěn)態(tài)效果好.在第600 s的時候分別加入一個-5 ℃的干擾信號[5],由圖6可知,模糊自適應(yīng)PID控制再一次恢復(fù)穩(wěn)態(tài)速度快且比傳統(tǒng)PID控制波動小,說明模糊自適應(yīng)PID控制抗干擾能力強、魯棒性能好. 從圖7可以看出模糊自適Kp,Ki,Kd變化趨勢大致符合實驗要求,因此實驗結(jié)果可靠,滿足實驗要求.
4 結(jié)論
為了驗證模糊自適應(yīng)PID控制比傳統(tǒng)的PID控制在電阻爐溫度控制中效果更好,基于MATLAB/simulink建立仿真模型,由仿真結(jié)果可知,在不知道精確的數(shù)學模型下,根據(jù)專家知識和操作人員的經(jīng)驗建立模糊控制規(guī)則表,就可以實現(xiàn)模糊自適應(yīng)控制,模糊自適應(yīng)PID控制算法響應(yīng)快、達到穩(wěn)態(tài)時間短且穩(wěn)態(tài)控制效果好,抗干擾能力和魯棒性比傳統(tǒng)PID控制強,并且可以達到工業(yè)生產(chǎn)過程中的控制需求,實用價值高,但是本文中模糊自適應(yīng)控制在響應(yīng)時間不夠快有待進一步改進.
參考文獻
[1] 劉中杰. 基于模糊PID的電阻爐溫度控制系統(tǒng)[J]. 電子設(shè)計工程, 2012, 20(13):151-154 .
[2] 李夢瑤. 基于模糊神經(jīng)網(wǎng)絡(luò)PID算法的電阻爐溫度控制系統(tǒng)的研究[D].鄭州:河南理工大學, 2014.
[3] 吳勇. 多臺電阻爐溫度智能群控系統(tǒng)的設(shè)計[D].武漢:武漢科技大學, 2013.
[4] 彭紀明. 電子數(shù)字式體溫計設(shè)計[J]. 科技風, 2014(4):89-89.
[5] 鄧玉斌. 帶多種保護電路的LED驅(qū)動電路的設(shè)計[D]. 湘潭:湘潭大學, 2016.
[6] 許玉忠. 基于自適應(yīng)模糊PID控制的電阻爐溫度控制系統(tǒng)[J]. 華北水利水電大學學報(自然科學版), 2011, 32(2):83-86.
[7] 董愛華, 李夢瑤. 基于模糊神經(jīng)網(wǎng)絡(luò)PID算法的電阻爐溫控系統(tǒng)[J]. 微型電腦應(yīng)用, 2013, 29(12):44-46.
[8] 蘇州經(jīng)貿(mào)職業(yè)技術(shù)學院. 一種動態(tài)模糊控制系統(tǒng) :CN203350635[P].2013-12-18.
[9] 李浩涌. 一種飼料烘干機的溫度控制研究及其流場分布數(shù)值模擬[D]. 杭州:浙江大學, 2014.
[10] 謝仕宏.MATLAB R2008 控制系統(tǒng)動態(tài)仿真實例教程[M]. 北京:化學工業(yè)出版社,2008.
[11] 陳贊, 譚光興, 林聰,等. 基于模糊算法的純電動汽車制動能量回收[J]. 廣西科技大學學報, 2014, 25(3):32-37.
[12] 孔峰,羅文廣. 一種基于模糊控制的單片機電機調(diào)速系統(tǒng)[J]. 廣西工學院學報,2001,12(1):44-47.
Abstract: The resistance furnace is a controlled object whose working parameters vary with the furnace temperature. It has the characteristics of nonlinearity and large hysteresis, and it is difficult to establish its precise mathematical model. According to the related literature, first, the temperature model of the resistance furnace is equivalent to the first order inertia hysteresis, we take the system error e and the error rate of change ec as inputs of the system, then adopt a fuzzy adaptive PID control method to adjust the parameters of PID online automatically. This paper designs a kind of resistance furnace temperature fuzzy adaptive PID controller hardware system and control logic. In order to verify the rationality of the designed system, the whole control system is modeled and simulated by the software MATLAB. The simulation results show that when the resistance furnace temperature control adopts the traditional PID control algorithm, the overshoot is 18.5%, the steady-state time is 600 s at the temperature of 100 ℃, while adopts the fuzzy adaptive PID control algorithm, the overshoot is basically zero, the steady-state time is 300 s. It is shown that the fuzzy adaptive PID control algorithm has a fast response time and a good effect. At the time of 600 s, when a -5 ℃ interference signal is added to the two different resistance furnace temperature control systems, the fuzzy adaptive PID control system fluctuation is small , the steady-state recovery time is short, which indicates that the robustness is good. Therefore, applying the fuzzy adaptive PID control algorithm to the temperature control of the resistance furnace has a high practical value.
Key words: resistance furnace; temperature control; fuzzy self-adaptive control; Matlab simulation
(學科編輯:張玉鳳)