用于在軌裝配鎖緊釋放機(jī)構(gòu)的設(shè)計(jì)*
2018-05-02 03:16:11阮偉靖薛百文高碧祥龐羽佳楊臻
現(xiàn)代防御技術(shù) 2018年2期
阮偉靖,薛百文,高碧祥,龐羽佳,楊臻
(1.中北大學(xué) 機(jī)電工程學(xué)院,山西 太原 030051;2.四川航天電子設(shè)備研究所,四川 成都 610102; 3.中國(guó)空間技術(shù)研究院,北京 100094)
0 引言
空間技術(shù)處于現(xiàn)代高技術(shù)信息化戰(zhàn)爭(zhēng)的制高點(diǎn),是世界各國(guó)爭(zhēng)相發(fā)展的軍事戰(zhàn)略核心之一[1-2]。針對(duì)傳統(tǒng)空間站的技術(shù)限制以及未來(lái)空間站的發(fā)展方向,亟需發(fā)展一種新型的航天技術(shù)來(lái)將受限制的天基平臺(tái)、大型武器裝備等大質(zhì)量、大體積的地面裝備拆卸后分批次發(fā)射到空間中,模塊化航天器設(shè)計(jì)概念應(yīng)運(yùn)而生[3]。模塊化航天器(modular spacecraft design, MSD)是使航天器系統(tǒng)能夠在軌組裝、在軌模塊更換、補(bǔ)加擴(kuò)展、升級(jí)等服務(wù)的首要條件[4]。
航天器在軌裝配技術(shù)是模塊化航天器的重要組成部分。本文基于空間結(jié)構(gòu)在軌組裝與構(gòu)建的典型應(yīng)用需求,設(shè)計(jì)用于在軌裝配的鎖緊釋放機(jī)構(gòu)[5-7]。該結(jié)構(gòu)由空間基礎(chǔ)平臺(tái)上的機(jī)械臂對(duì)地面發(fā)射的有效載荷進(jìn)行操作,從而實(shí)現(xiàn)航天器的在軌裝配。
1 鎖緊釋放機(jī)構(gòu)
在軌裝配模塊的地面原理樣機(jī)如圖1所示,共分為4個(gè)模塊:主動(dòng)模塊、被動(dòng)模塊、試驗(yàn)架模塊和連接檢測(cè)通信模塊。其中,主動(dòng)模塊包括:殼體機(jī)構(gòu)、導(dǎo)向阻尼機(jī)構(gòu)和定位件。被動(dòng)模塊包括:安裝平臺(tái)、鎖緊釋放機(jī)構(gòu)和定位接納件。在軌裝配模塊具體結(jié)構(gòu)如圖2所示。
鎖緊釋放機(jī)構(gòu)安裝于被動(dòng)模塊底部,當(dāng)與主動(dòng)模塊上的導(dǎo)向阻尼機(jī)構(gòu)配合時(shí),完成被動(dòng)模塊對(duì)主動(dòng)模塊的鎖緊動(dòng)作;當(dāng)鎖緊爪鎖緊到位時(shí),觸發(fā)到位檢測(cè)按鍵,在顯示系統(tǒng)上顯示鎖緊到位;當(dāng)主動(dòng)模塊需要被釋放時(shí),基本系統(tǒng)給出釋放信號(hào),鎖緊釋放機(jī)構(gòu)中的記憶合金壓縮彈簧受熱伸展,頂開(kāi)鎖緊爪,完成對(duì)主動(dòng)模塊的釋放動(dòng)作。鎖緊釋放機(jī)構(gòu)的爆炸圖和結(jié)構(gòu)圖如圖3所示。
2 鎖緊釋放機(jī)構(gòu)工作過(guò)程
在軌裝配模塊的鎖緊釋放機(jī)構(gòu)工作過(guò)程分為2個(gè)過(guò)程。鎖緊過(guò)程包括:導(dǎo)向頭到位;推桿推動(dòng)觸發(fā)套筒同時(shí)鎖緊爪回轉(zhuǎn);鎖緊爪到位完成對(duì)鎖緊蓋的鎖緊。釋放過(guò)程包括:電阻絲被加熱,記憶合金彈簧(以下簡(jiǎn)稱SMA彈簧)受熱伸長(zhǎng)并通過(guò)記憶合金套筒頂開(kāi)鎖緊爪;鎖緊爪釋放到位,主動(dòng)模塊在機(jī)械臂操作下與被動(dòng)模塊分離;對(duì)電阻絲停止加熱,SMA彈簧恢復(fù)初始狀態(tài),完成釋放過(guò)程。系統(tǒng)工作循環(huán)圖如表1所示。
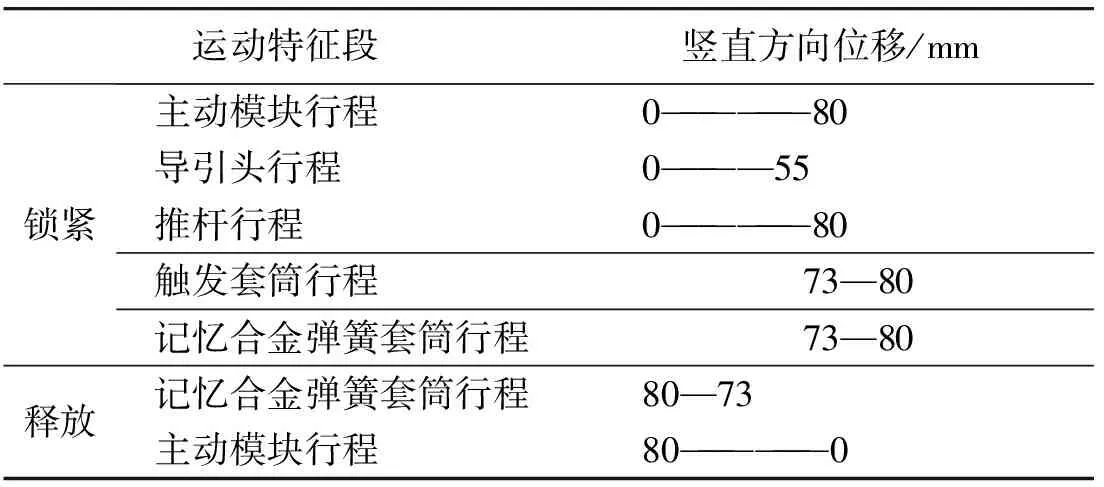
表1 系統(tǒng)工作循環(huán)表
2.1 “無(wú)源”鎖緊工作過(guò)程
在軌裝配模塊的“無(wú)源”鎖緊技術(shù)指主動(dòng)模塊在裝配時(shí),僅依靠機(jī)械臂作為動(dòng)力源對(duì)整個(gè)鎖緊動(dòng)作提供動(dòng)力,即在鎖緊釋放模塊中不存在動(dòng)力裝置——如電機(jī)等,這不僅大大縮減了鎖緊釋放模塊的體積和質(zhì)量,還降低了鎖緊釋放模塊的結(jié)構(gòu)復(fù)雜程度。
鎖緊過(guò)程中,當(dāng)導(dǎo)引頭到位后主動(dòng)模塊和推桿等在主動(dòng)力的作用下繼續(xù)運(yùn)動(dòng),推桿在空載一段行程后,推動(dòng)觸發(fā)套筒向下運(yùn)動(dòng),壓縮觸發(fā)簧,從而釋放鎖緊扭簧的預(yù)存能量,使鎖緊爪在鎖緊扭簧的作用下回轉(zhuǎn)并壓縮在常溫下幾乎不存在彈簧剛度的記憶合金彈簧,當(dāng)觸發(fā)套筒運(yùn)動(dòng)到位后,鎖緊爪也會(huì)完成對(duì)鎖緊蓋的鎖緊動(dòng)作,該段運(yùn)動(dòng)簡(jiǎn)圖如圖4所示。
在“無(wú)源”鎖緊中至關(guān)重要的功能是鎖緊爪鎖緊完成時(shí)所具備的自鎖功能。該自鎖功能主要運(yùn)用了連桿機(jī)構(gòu)中的“死點(diǎn)”位置[8]。當(dāng)主動(dòng)模塊受到分離力時(shí),鎖緊爪受到的力與鎖緊爪回轉(zhuǎn)中心處在同一直線位置,即不存在回轉(zhuǎn)力臂。所以在此位置上,該鎖緊方式具備了可靠的自鎖功能,鎖緊爪鎖緊時(shí)的受力分析如圖5所示。
2.2 SMA彈簧釋放過(guò)程
由于鎖緊釋放機(jī)構(gòu)整體體積小,安裝空間有限,因此選用具有結(jié)構(gòu)小型化、結(jié)構(gòu)簡(jiǎn)單特點(diǎn)的SMA彈簧作為驅(qū)動(dòng)器[9]。形狀記憶合金是擁有形狀記憶效應(yīng)的材料,合金處于低溫相時(shí)變形,加熱到臨界溫度(逆相變點(diǎn))通過(guò)逆相變恢復(fù)其原始形狀,稱之為形狀記憶效應(yīng)[10]。
在釋放工作過(guò)程中SMA彈簧釋放主動(dòng)模塊的工作過(guò)程如圖6所示。
3 SMA彈簧參數(shù)計(jì)算
從分離過(guò)程可知,SMA彈簧所提供的機(jī)械力是影響鎖緊爪完成釋放動(dòng)作的主要因素,故對(duì)鎖緊爪進(jìn)行受力分析,受力分析如圖7所示。
(1)
式中:f為摩擦系數(shù),航天裸露金屬存在接觸表面為防止冷焊現(xiàn)象[11],需鍍二硫化鉬,其摩擦系數(shù)值為0.05[12];N為鎖緊扭簧提供的鎖緊簧力,其值為69 N;M為鎖緊扭簧在鎖緊時(shí)提供的鎖緊力矩,其值為74 N·mm。
根據(jù)上述的計(jì)算公式和相關(guān)數(shù)值,計(jì)算得出SMA彈簧應(yīng)提供的機(jī)械力F≥10.5 N,考慮其余影響因素,在機(jī)械力F的基礎(chǔ)上乘以系數(shù)1.5,得到記憶合金彈簧應(yīng)提供機(jī)械力16 N。
在常用的記憶合金材料當(dāng)中,主要為T(mén)iNi合金和CuZnAl合金等。表2為常用記憶合金的材料屬性。
因模塊化航天器的工作要求,鎖緊釋放機(jī)構(gòu)要求性能可靠以及可重復(fù)使用,故選擇TiNi合金。

表2 常用記憶合金的材料屬性
現(xiàn)已知TiNi合金的最大剪切應(yīng)力τmax=120 MPa,τH=247.5 MPa,TiNi合金的γmax=0.018,剪切應(yīng)變母相的剪切模量GH=23 GPa,馬氏體的剪切模量GL=8 GPa,輸出力P=16 N,輸出位移δ=10 mm,彈簧指數(shù)C=5,根據(jù)記憶合金彈簧的計(jì)算公式[6],可以得到記憶合金彈簧參數(shù):
(2)
(3)
D=Cd=5.5 mm,
(4)
(5)
γδ=γmax-γH=0.007,
(6)
(7)
式中參數(shù)說(shuō)明詳見(jiàn)參考文獻(xiàn)[13],在此不作贅述。SMA彈簧和鎖緊扭簧等彈簧參數(shù)具體如表3所示。

表3 彈簧參數(shù)表
4 ADAMS仿真分析
建立樣機(jī)模型后,通過(guò)動(dòng)力學(xué)仿真分析軟件MSC-ADAMS,對(duì)虛擬樣機(jī)進(jìn)行仿真分析[14-15]。
4.1 建模假設(shè)
在軌裝配模塊模型零部件較多,系統(tǒng)較為復(fù)雜,對(duì)模型進(jìn)行合理地簡(jiǎn)化和假設(shè),可以把復(fù)雜問(wèn)題簡(jiǎn)單化,有利于動(dòng)力學(xué)模型的建立和仿真。現(xiàn)對(duì)在軌裝配模塊模型提出如下假設(shè):
(1) 模型的零部件均作剛體考慮;
(2) 不考慮零部件之間的尺寸公差和自然誤差;
(3) 動(dòng)力學(xué)仿真按照在空間環(huán)境下進(jìn)行,只考慮主動(dòng)模塊與被動(dòng)模塊,忽略地面試驗(yàn)裝置——試驗(yàn)架,同時(shí),不計(jì)重力加速度的影響;
(4) 機(jī)械臂抓持主動(dòng)模塊進(jìn)行裝配的動(dòng)作簡(jiǎn)化為主動(dòng)模塊在模塊接口方向上的力作用下進(jìn)行裝配。
4.2 模型設(shè)置
通過(guò)三維建模軟件Pro/E建立整個(gè)在軌裝配模塊的三維模型并裝配后,將其導(dǎo)入ADAMS仿真軟件,將所有零部件材料屬性均制定為鋁,根據(jù)裝配關(guān)系定義約束,并按表3設(shè)置彈簧參數(shù)。
4.3 仿真結(jié)果
仿真過(guò)程中,主要針對(duì)鎖緊與釋放2個(gè)功能進(jìn)行仿真分析。一是在鎖緊到位后,主動(dòng)模塊受150 N外力下死點(diǎn)結(jié)構(gòu)是否可靠,能否完成自鎖。二是釋放工作時(shí),SMA彈簧能否完成解鎖動(dòng)作。條件設(shè)置以及鎖緊爪的旋轉(zhuǎn)角度如圖8~10所示。
從圖10中可以看出,3個(gè)鎖緊爪的展開(kāi)性能雖有細(xì)微不同,但基本保持一致。在3.0 s時(shí),鎖緊爪進(jìn)行鎖緊并在0.1 s內(nèi)完成鎖緊。3.5 s時(shí),裝配所用的外力撤銷(xiāo)時(shí),受導(dǎo)引頭上的阻尼簧作用,鎖緊爪有回彈動(dòng)作,隨后保持穩(wěn)定鎖緊狀態(tài)。在4.0 s時(shí),對(duì)主動(dòng)模塊施加150 N的拉力,鎖緊爪有輕微振動(dòng),但很快穩(wěn)定,并保持自鎖狀態(tài)。6.0 s時(shí),施加SMA彈簧力,鎖緊爪在0.3 s時(shí)間內(nèi)完成釋放動(dòng)作。
綜上,該鎖緊與釋放機(jī)構(gòu)的“死點(diǎn)”結(jié)構(gòu)可靠,能夠完成自鎖。SMA彈簧參數(shù)準(zhǔn)確,能夠?qū)崿F(xiàn)快速釋放的動(dòng)作。
5 結(jié)束語(yǔ)
根據(jù)模塊化航天器中在軌裝配技術(shù)的要求,本文以航天器結(jié)構(gòu)機(jī)構(gòu)設(shè)計(jì)為理論基礎(chǔ),參考國(guó)外在軌裝配模塊的典型結(jié)構(gòu),設(shè)計(jì)了一種鎖緊釋放機(jī)構(gòu),對(duì)所需的SMA彈簧進(jìn)行了分析計(jì)算,得出SMA彈簧參數(shù)。再將虛擬樣機(jī)進(jìn)行了仿真分析,將所得的數(shù)據(jù)曲線與理論設(shè)計(jì)上的數(shù)據(jù)進(jìn)行對(duì)比,結(jié)果高度一致,表明該模型的可靠性高,為原理樣機(jī)的加工提供了可靠的理論依據(jù),同時(shí)也為在軌裝配技術(shù)提供了進(jìn)一步的研究依據(jù)。
參考文獻(xiàn):
[1] 常顯奇.軍事航天學(xué)[M].北京:國(guó)防工業(yè)出版社,2002.
CHANG Xian-qi.Military Astronautics[M].Beijing: National Defense Industry Press,2002.
[2] 李傳臚.新概念武器[M].北京:國(guó)防工業(yè)出版社,1999.
LI Chuan-lu.New Concept Weapon[M].Beijing: National Defense Industry Press,1999.
[3] 蘆瑤.空間在軌裝配技術(shù)發(fā)展歷程研究[D].哈爾濱:哈爾濱工業(yè)大學(xué),2011.
LU Yao.The Study of Space on-Orbit Assembly Technology[D].Harbin: Harbin Institute of Technology,2011.
[4] REYNERSON C M.Spacecraft Modular Architecture Design for on-Orbit Servicing[C]∥Proceedings of the Aerospace Conference Proceedings,IEEE,2000: 227-238.
[5] 陳小前,袁建平,姚雯,等.航天器在軌服務(wù)技術(shù)[M].北京:中國(guó)宇航出版社,2009.
CHEN Xiao-qian,YUAN Jian-ping,YAO Wen,et al.Spacecraft on-Orbit Service Technology[M].Beijing:China Astronautic Publishing House,2009.
[6] 郭繼峰,王平,崔乃剛.大型空間結(jié)構(gòu)在軌裝配技術(shù)的發(fā)展[J].導(dǎo)彈與航天運(yùn)載技術(shù),2006(3):28-35.
GUO Ji-feng,WANG Ping,CUI Nai-gang.Development of on-Orbit Assembly of Large Space Structures[J].Missiles and Space Vehicles,2006(3):28-35.
[7] 龐羽佳,李志,陳新民,等.模塊化可重構(gòu)空間系統(tǒng)研究[J].航天器工程,2016(3):101-108.
PANG Yu-jia,LI Zhi,CHEN Xin-min,et al.Research on Modular Reconfigurable Space System[J].Spacecraft Engineering,2016(3):101-108.
[8] 鄒惠君,傅祥志,張春林,等.機(jī)械原理[M].北京:高等教育出版社,1999:44-45.
ZOU Hui-jun,FU Xiang-zhi,ZHANG Chun-lin,et al.Mechanical Principle[M].Beijing:Higher Education Press,1999:44-45.
[9] 楊杰,吳月華.形狀記憶合金及其應(yīng)用[M].合肥:中國(guó)科學(xué)技術(shù)大學(xué)出版社,1993:209-222.
YANG Jie,WU Yue-hua.Shape Memory Alloys and Their Applications[M].Hefei:Press of University of Science and Technology of China,1993:209-222.
[10] 趙連城,蔡偉,鄭玉峰.合金的形狀記憶效應(yīng)與超彈性[M].北京:國(guó)防工業(yè)出版社,2002:244.
ZHAO Lian-cheng,CAI Wei,ZHENG Yu-feng.Shape Memory Effect and Super Elasticity in Alloys[M].Beijing:National Defense Industry Press,2002:244.
[11] 童靖宇.空間冷焊效應(yīng)及其防護(hù)技術(shù)研究[J].航天器環(huán)境工程,2000(1):39-45.
TONG Jing-yu.Space Cold Welding Effect and Its Avoidance[J].Spacecraft Environmental Engineering,2000(1):39-45.
[12] 張文鉦,姚殳.二硫化鉬制備與應(yīng)用研究進(jìn)展[J].潤(rùn)滑油,2006(4):19-24.
ZHANG Wen-zheng,YAO Shu.An Advance in the Research of Preparation and Application of Molybdenum Disulfide Lubricant[J].Lubricating Oil,2006(4):19-24.
[13] 舟久保,熙康.形狀記憶合金[M].千東范,譯.北京:機(jī)械工業(yè)出版社,1984.
ZHOU Jiu-bao,XI Kang.Shape Memory Alloy[M].QIAN Dong-fan,translated.Beijing:China Machine Press,1984.
[14] 范成建,熊光明,周明飛.虛擬樣機(jī)軟件MSC.ADAMS應(yīng)用與提高[M].北京:機(jī)械工業(yè)出版社,2006.
FAN Cheng-jian,XIONG Guang-ming,ZHOU Ming-fei.Virtual Prototyping Software MSC.ADAMS Application and Improvement[M].Beijing:China Machine Press,2006.
[15] 王國(guó)強(qiáng),張進(jìn)平,馬若丁.虛擬樣機(jī)技術(shù)及其在ADAMS中的實(shí)踐[M].西安:西北工業(yè)大學(xué)出版社,2002.
WANG Guo-qiang,ZHANG Jin-ping,MA Ruo-ding.Virtual Prototyping Technology and Its Practice in ADAMS[M].Xi′an:Northwestern Polytechnical University Press,2002.
猜你喜歡
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
科學(xué)技術(shù)創(chuàng)新(2020年21期)2020-01-06 20:58:51
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年12期)2019-05-21 07:26:42
小學(xué)生作文(低年級(jí)適用)(2018年3期)2018-04-17 00:58:35
小溪流(畫(huà)刊)(2017年12期)2018-01-10 16:07:29
少年博覽·小學(xué)低年級(jí)(2017年4期)2017-06-09 16:22:28
作文評(píng)點(diǎn)報(bào)·低幼版(2017年7期)2017-03-11 20:49:41
科技知識(shí)動(dòng)漫(2016年8期)2016-07-29 20:40:09
兒童故事畫(huà)報(bào)·發(fā)現(xiàn)號(hào)趣味百科(2015年12期)2016-01-25 00:41:49
少兒科學(xué)周刊·少年版(2015年4期)2015-07-07 20:56:37