緊縮場測試掃描架平面度控制系統研制
2018-05-10 08:41:15孫祥溪
宇航計測技術 2018年1期
關鍵詞:系統
寇 鵬 孫祥溪 任 濤 孫 雨
(北京無線電計量測試研究所,北京 100039)
1 引 言
掃描架是用于測量緊縮場微波或毫米波平面度的專用設備。隨著技術的發展,緊縮場形成的靜區范圍更大,頻率更高,這對測試掃描架的平面度指標提出相應更高的要求。而大型掃描架由于結構尺寸大,易受溫度變化、環境振動、重力形變影響產生形變,單純靠機械加工及裝配工藝已經無法實現對高平面度控制的要求。因此,需要采取相應的補償措施來滿足緊縮場測試的需求[1]。
已有的掃描架平面度補償方法多采用半實時的方式。北京航空航天大學張厚江等[2]研制的極坐標型掃描架先將各測試點補償值預存于系統中,測試過程中利用小車微調機構進行補償。該方法的缺點在于所有補償點均為前期實驗階段標定的預存值,而實際應用過程中受設備異地搬運、長期使用機械結構變形等因素的影響,預存的設置數據則不能一直保證補償數據的正確性;北京長城計量測試技術研究所曹鐵澤等[3]研制的圓柱形極坐標掃描架通過分別測試掃描架各測試點的位置偏差和微波信號數據得到補償量,待測試完成后通過軟件方法進行補償,該方法的缺點在于補償結果為二次處理,非實時進行,測量效率低,且由于將激光發射器安裝于設備本體上,由于設備底座不穩定、測試過程中設備重心變化等因素影響,不能保證激光發射器掃描平面與緊縮場靜區的相對位置不變。
上述半實時補償方法在每次測試之前,均需先通過測試建立誤差修正表,再進行補償。效率相對較低且不能避免掃描架在測試過程中因環境等因素影響帶來的誤差。為保證測試效率以及測試結果的準確性,本文針對自研的掃描區域為Φ6m的大型極化掃描架,設計了一種掃描架平面度實時補償系統。
2 掃描架平面度實時補償系統設計
2.1 補償系統組成
掃描架平面度實時補償系統主要由激光平面發射器、位置敏感探測器PSD、控制器和伺服補償器等組成,系統示意如圖1所示。激光平面發射器固定于水平地面。伺服補償器固定于平面掃描架的旋臂上,安裝有位置敏感探測器PSD和天線組件。測試過程中伺服補償器跟隨掃描架一起運動[4,5]。
當緊縮場平面掃描架工作時,激光平面發射器發射激光束,通過自身極化旋轉形成垂直于緊縮平面場微波傳播方向的基準參考平面。位置敏感探測器PSD接收激光信號,計算其感應區零位與基準參考平面的位置偏差并實時反饋給控制器。控制器通過運動控制卡中的伺服算法生成速度控制指令給驅動器,由驅動器驅動伺服補償器進給補償,使位置敏感探測器PSD感應區零位與激光基準參考面重合,從而實現掃描面平面度誤差動態補償[6]。
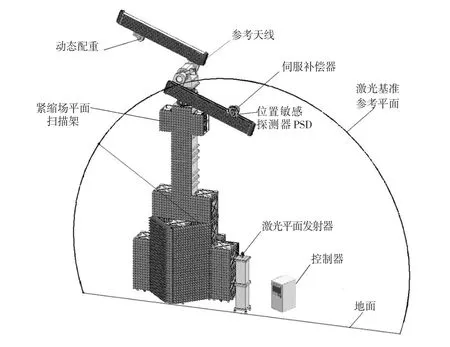
圖1 掃描架平面度補償系統示意圖Fig.1 Diagram of compensation system for planeness of compact range
2.2 伺服補償器設計
伺服補償器是平面度補償的執行單元,主要包括天線進給補償模塊、天線極化模塊、靶標環形極化模塊等,如圖2所示。
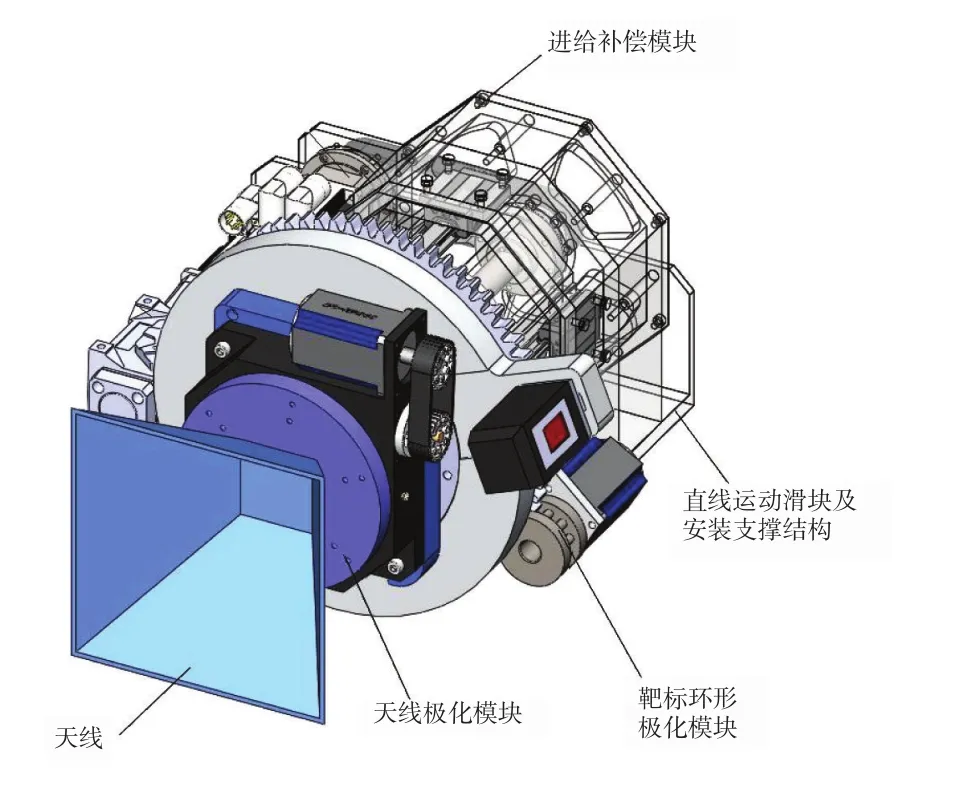
圖2 伺服補償器結構示意圖Fig.2 Diagram of servo compensator
天線進給補償模塊采用八邊形筒型支撐結構,配合高精度滾珠絲杠副傳動,帶動平面度測量設備及控制設備一同完成天線平面的平面度補償動作。天線極化模塊采用同步帶輪帶動雙導程消隙蝸桿的傳動方式,并選用單精密交叉滾子軸承作為支撐組件,其上裝有天線組件,根據測試需要帶動天線組件旋轉。靶標環形極化模塊采用一體化結構設計,位置敏感探測器PSD安裝在環形法蘭面上,在主旋轉運動的過程中,靶標環形極化模塊同步反向旋轉,保證靶標的感應接收面正對于激光發生器,以避免激光平面的感應盲區。
2.3 平面度補償原理
掃描架平面度實時補償系統采用精確位置的控制方式,平面誤差補償控制框圖如圖3所示。補償系統利用電機編碼器反饋構成速度閉環,利用光柵反饋構成位置閉環,以期望目標位置指令與位置敏感探測器反饋的位置偏差之差作為補償指令輸入。補償系統期望目標位置始終為“0”,即使位置敏感探測器PSD感應區零位與激光基準參考面重合。
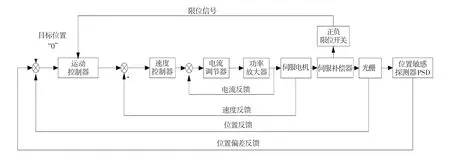
圖3 平面誤差補償控制框圖Fig.3 Diagram of compensation control block for planeness error
天線組件在掃描架旋臂上運動時,所產生的位置偏差信號是隨機的小位移變化。位置敏感探測器PSD每20ms傳回一次位置偏差。掃描架平面度實時補償系統需能夠實時、準確、快速的響應輸入信號,對掃描平面度進行補償。
掃描架平面度實時補償系統以運動控制卡為核心控制器,實現PID+速度/加速度前饋+NOTCH濾波的控制環算法[7],如圖4所示。
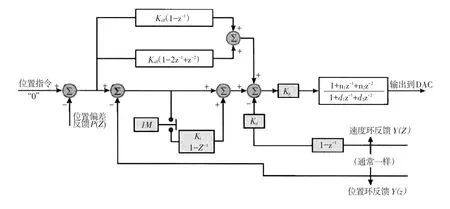
圖4 運動控制卡控制環算法示意圖Fig.4 Diagram of control loop algorithm of control card
圖4中,KP為比例增益;KD為微分增益;Kvff為速度前饋增益;KI為積分增益;IM為積分模式;Kaff為加速度前饋增益;n1,n2,d1,d2為NOTCH濾波相關參數。
本實時補償系統僅采用PID+速度/加速度前饋算法,暫不考慮NOTCH濾波,則可推導出實時補償系統傳遞函數為:

式中:P(z)——位置偏差反饋;Y(z)——光柵位置反饋。
實時補償系統通過引入速度前饋增益,可以有效減小系統的跟隨誤差;引入加速度前饋增益,可以有效消除系統在加減速時的跟隨誤差。從而提高補償系統的響應速度和位置控制精度,保證掃描面平面度精度[8]。
3 實時補償測試
掃描架具有半徑式掃描和直徑式掃描兩種形式,在直線掃描臂上配置雙法蘭以適應不同使用方式。半徑式安裝時,可滿足行程3100mm的要求,直徑式安裝時可滿足行程2200mm(最大可至3100mm)的要求。如圖5所示,掃描架采用半徑安裝方式,進行實時補償性能測試。
掃描架結構安裝完成后,開啟激光平面發射器,形成基準參考平面。運行掃描架控制系統人機界面,切換至掃描架補償測試界面,如圖6所示。與位置敏感探測器PSD建立通訊,實時讀取位置敏感探測器PSD感應區零位與基準參考平面的位置偏差,對掃描架平面度進行補償。

圖5 掃描架半徑式安裝實物圖Fig.5 Radial installation of scanner
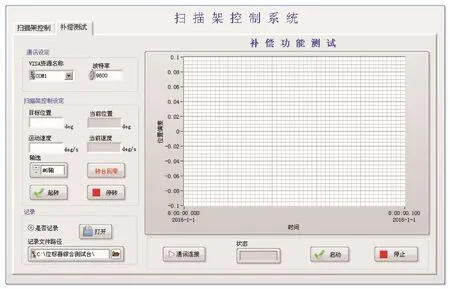
圖6 補償系統控制界面Fig.6 The interface of compensation system
本文利用激光跟蹤儀分別對掃描架掃描平面的不同點進行測試,計算各點距基準平面的位置偏差和沿來波方向掃描臂的直線度。補償前后各測試點距基準平面位置偏差及沿來波方向掃描臂的直線度對比情況如圖7和圖8所示。
經專業計量機構現場檢測后,掃描架沿來波方向掃描臂直線度優于0.058mm。掃描面平面度RMS值為0.048mm。檢測數據見表1。
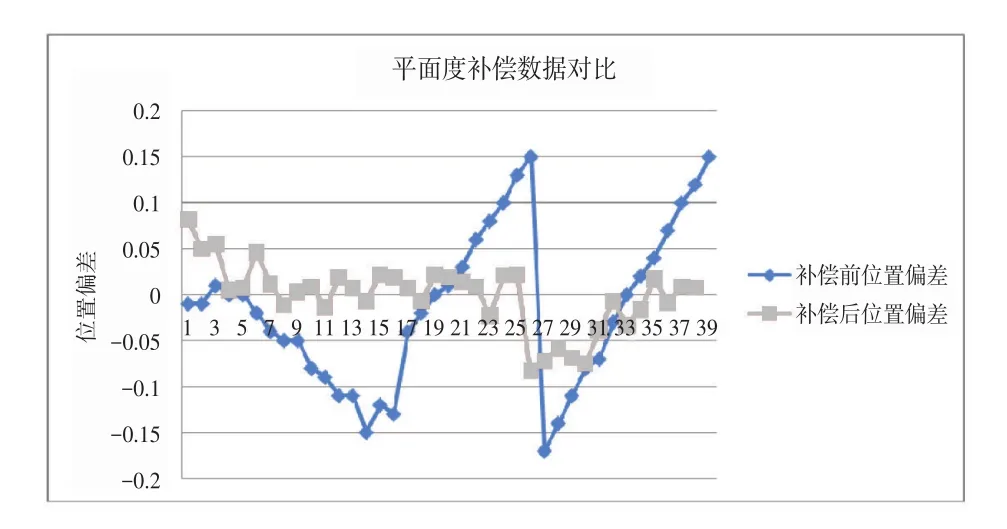
圖7 平面度補償數據對比圖Fig.7 Comparison chat of planeness compensation data
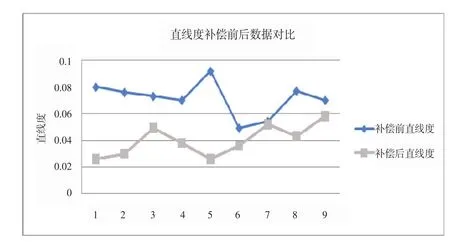
圖8 直線度補償前后數據對比圖Fig.8 Comparison chat of straightness compensation data
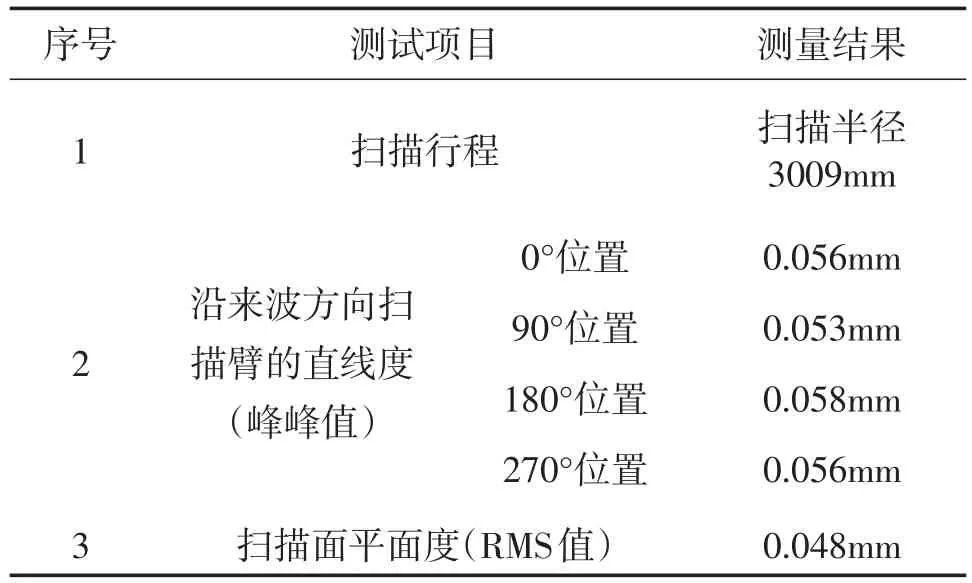
表1 掃描架平面度指標檢測結果Tab.1 Test indicators of scanner planeness
4 結束語
掃描架掃描形成的測試平面的平面度是緊縮場平面掃描架的關鍵指標。本文以自研的掃描區域φ6m大型極化掃描架為試驗對象,設計了一套掃描架平面度實時補償系統,用位置敏感探測器實時檢測掃描架平面度誤差,并通過伺服補償器完成掃描架平面度補償。測試結果表明,該平面度實時補償系統可以快速、準確完成掃描平面度的補償,并將掃描架平面度誤差控制在0.048mm以內。該實時補償系統已多次成功應用于緊縮場現場校準測試。
[1]胡春華,樊銳,陳五一.緊縮平面場掃描架系統研制[J].北京航空航天大學學報,2002,28(1):122-124.
[2]張厚江,樊銳,陳五一.高精度緊縮場掃描架的研制[J].機械設計與制造,2005,9:111-113.
[3]曹鐵澤,孫安斌,王繼虎.基于圓柱筒支撐緊縮場極坐標測試掃描系統的研制[J].新技術新儀器,2014,34(4):11-13.
[4]吳翔,何鑫,寇鵬,等.一種大型緊縮場極坐標測試掃描架系統的設計與實現[J].宇航計測技術,2017,37(5):1-9.
[5]馬永光,楊金濤,何鑫,等.緊縮場靜區平面波相位特征高精度測量[C].2015年全國天線年會論文集(下冊):1067-1070.
[6]焦洪杰,陳五一,王春潔.大型緊縮場測試掃描架誤差分析探討.北京工商大學學報(自然科學版),2006.11(24):18-21.
[7]田崇興,李錫文,胡照.基于PMAC的模糊自整定PID算法的研究[J].機械與電子,2010(10):60-63.
[8]趙保亞.基于PMAC的數控系統PID參數調節研究[J].機械設計與制造,2007.10(10):146-148.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32