一種姿軌控軟件仿真測試平臺的遙測解析軟件設計與實現
2018-05-17 06:02:40魏冬冬胡逸琳葉竹劉葉盛李芳芳
電子測試 2018年8期
關鍵詞:數據處理
魏冬冬,胡逸琳,葉竹,劉葉盛,李芳芳
(上海航天電子技術研究所,上海,201109)
0 引言
姿軌控系統[1]是衛星的重要組成部分,全面實現衛星的姿態軌道控制,確保衛星滿足指向精度、穩定度及衛星軌道等性能指標。姿軌控軟件仿真測試平臺用于構建姿軌控軟件的測試環境,通過純軟件模擬的方式完成姿軌控軟件的閉環仿真運行。姿軌控軟件仿真測試平臺對于完成姿軌控軟件的第三方配置項測試[2]具有重要意義。
遙測解析軟件是姿軌控軟件仿真測試平臺的重要組成部分,它用于建立閉環仿真測試的下行數據通道,實現下行數據的顯示、記錄以及回放,完成正常和異常測試用例的執行和結果觀測功能。
1 遙測解析軟件設計
為了適應第三方測試需求,遙測解析軟件需要實時解析顯示各個通道的遙測數據,在姿姿軌控軟件仿真測試平臺中,共有數千個不同的數據通道,遙測解析軟件接收到的數據幀有數百種不同的類型,對數據處理的實時性和正確性要求較高。此外,遙測解析軟件還需要有記錄波道歷史數據曲線的功能,可以用于在配置項測試中分析當前姿態數據等變化曲線是否正確合理。
針對課題遙測數據接口種類豐富、數據交互性強、對時序要求高的特點,遙測解析軟件采用分層設計結構,如圖1所示。遙測解析軟件分為三個處理層:
◎ 數據驅動層實現接收底層的網絡報文數據、加載配置文件等功能,并將數據交給數據處理層;
◎ 數據處理層完成數據校驗和計算、遙測數據查詢和解析,并將結果交給數據顯示層;
◎ 數據顯示層主要用于和用戶交互,完成遙測數據對測試人員的呈現。

圖1 遙測解析軟件結構圖
結合姿軌控軟件仿真測試平臺的數據流程,本課題設計的遙測解析軟件數據處理流程如下。
(1)程序初始時加載初始信息,主要有:
◎ 波道表配置信息,包括各個波道號、波道顯示內容、波道數據類型長度、數據單位、數據量綱等信息;
◎ 數據單機配置信息;
◎ 不同數據字節的處理信息;
◎ 所有數據幀類型及數據格式信息等;
(2)遙測解析軟件通過獨立的TCP線程接收遙測數據,按照不同的數據幀類型得到不同的波道原始數據;
(3)將波道原始數據按照字節類型得到轉換后數據,再按照量綱計算要顯示的最終結果;

圖2 遙測解析軟件流程示意圖
(4)將波道數據最終結果顯示到界面。
遙測解析軟件處理流程示意圖如圖2所示。
遙測解析軟件數據處理的關鍵在于接收到遙測數據后,在波道表配置信息中快速檢索并計算數據,每次接收的遙測數據格式為[幀頭,<數據1,標志1>, <數據2,標志2>, ...,<數據n,標志n> ]。假設需要處理的不同數據幀是M幀,包含的數據通道信息共有N個,若不進行數據結構優化,按照順序遍歷的方式判斷比較數據,則每次收到數據幀時數據檢索的時間復雜度[3]為O(M+N*n)。
為了提高計算效率,遙測解析軟件引入字典樹[4]的數據結構,增加了幀頭數據標識和對應處理幀的字典樹映射,幀頭檢索的時間復雜度優化為O(log M);增加了遙測接收通道數據和配置信息波道數據之間的字典樹映射,數據檢索的時間復雜度優化為O(n*log N)。于是,遙測解析軟件收到每幀數據的計算處理時間復雜度優化為O(logM+n*logN), 計算效率得到明顯改善。
遙測解析軟件在設計時增加了用戶可配置的數據顯示界面,用戶既可以配置頁面實時顯示多路通道數據;也可以配置界面顯示多個通道數據的數據變化趨勢。
為了利于在觀測到異常測試用例時進行測試過程回放,遙測解析軟件在數據處理過程中將收到的數據寫入文件,用戶可以選擇保存數據文件,在下次運行軟件時加載數據文件,完成異常測試用例的精確復現。
2 遙測解析軟件實現
本課題在Windows 7操作系統上,使用Visual Studio 2010作為開發工具,使用C#語言進行程序設計與實現,遙測解析軟件主界面如圖3所示。
在圖3中顯示了遙測解析軟件數據加載頁面,用戶可以瀏覽加載自定義的波道數據初·始配置文件。
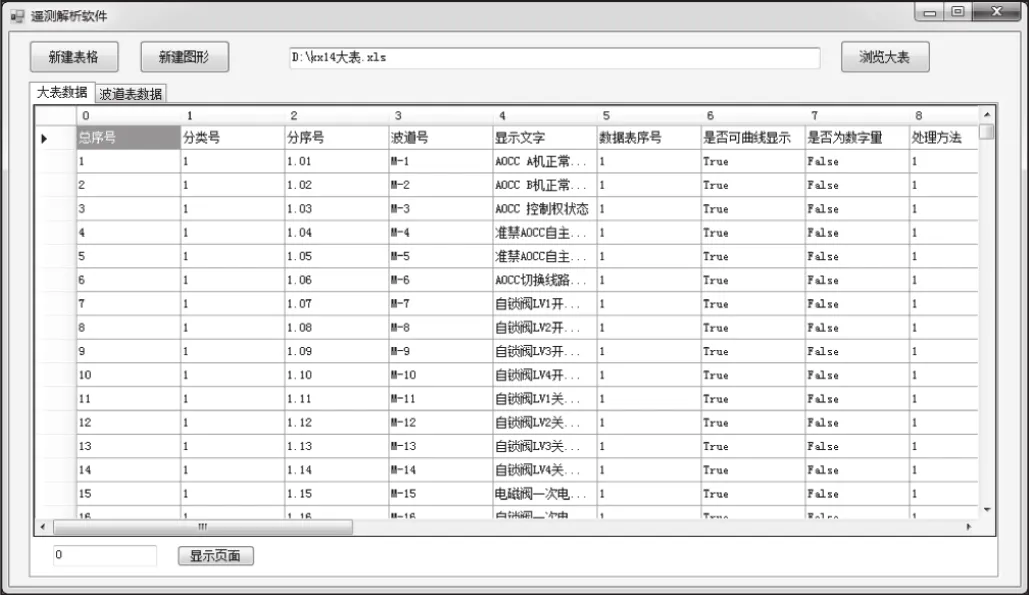
圖3 遙測解析軟件主界面
用戶可以根據不同的菜單選擇不同的數據解析方式。數據列表顯示方式與圖4中將特定通道數據被選中以后的歷史數據繪制成曲線,并以不同的顏色加以區分,方便測試人員觀測遙測數據變化情況。測試人員也可以根據界面提供的按鈕定制曲線的橫縱坐標范圍。
遙測解析軟件在接收遙測數據時,會自動將遙測原始數據保存成文件。測試人員可以選擇已有的遙測數據文件,按照預定的速度進行回放顯示。

圖4 遙測解析軟件圖形數據顯示界面
3 遙測解析軟件應用
經過大量測試,遙測解析軟件處理遙測數據并完成顯示更新的平均解算時間為10ms。某型號姿軌控軟件要求的遙測數據發送周期為200ms,滿足軟件測試人員的測試需求。經過多個型號姿軌控軟件的配置項測試,遙測解析軟件共完成累計460個測試用例執行,所有測試用例均正確完成了遙測數據的解析顯示,未出現遙測數據軟件的解析異常。
4 總結
姿軌控軟件仿真測試平臺構建的測試環境,對于航天型號姿軌控軟件的第三方配置項測試具有重要意義。遙測解析軟件作為姿軌控軟件仿真測試平臺的重要組成部分,通過運用字典樹的數據結構和相關算法優化,高效地實現了遙測數據的解析和顯示,為測試人員監控姿軌控軟件的內部狀態信息提供了良好的觀測途徑。遙測解析軟件經過多個型號姿軌控軟件的配置項測試使用,運行實時性和功能正確性得到了驗證,它也將會在今后更多型號的姿軌控軟件配置項測試中繼續發揮作用,為航天型號軟件產品質量保駕護航。
參考文獻
[1]李恒年.衛星機動軌道確定[M].北京:國防工業出版社,2013.
[2]楊海成,喬永強,許勝,石柱.航天型號軟件工程[M].北京:中國宇航出版社,2009.
[3]Thomas H. Cormen,Charles E. Leiserson,Ronald L.Rivest,Clifford Stein著.潘金貴,顧鐵成,李成法等譯.算法導論[M].北京:機械工業出版社,2011.
[4]吳永輝,王建德.數據結構編程實驗[M].北京:機械工業出版社,2012.
猜你喜歡
中學生數理化·自主招生(2022年9期)2022-05-30 10:48:04
心理學報(2022年4期)2022-04-12 07:38:02
水泵技術(2021年3期)2021-08-14 02:09:20
電子測試(2018年4期)2018-05-09 07:28:12
當代化工研究(2016年9期)2016-03-20 16:22:13
中國慣性技術學報(2015年1期)2015-12-19 13:12:17
計算機工程(2015年4期)2015-07-05 08:28:04
西華師范大學學報(自然科學版)(2015年3期)2015-02-27 15:31:22
聯合國青年技術培訓(2014年7期)2014-04-12 00:00:00
中國質量與標準導報(2014年7期)2014-02-28 22:24:35
