軍用手持式無線通信終端的設計與實現?
2018-05-29 11:50:27錢燦軍曹毓華
艦船電子工程 2018年5期
錢燦軍 曹毓華
(揚州萬方電子技術有限責任公司 揚州 225006)
1 引言
隨著現代戰爭的信息化和電子化,功能多樣而又實用的手持式無線通信終端日益受到軍方的重視。由于該終端能夠將衛星定位、地圖導航、數據采集、無線傳輸等功能集成于一體,對于高科技戰爭中各作戰個體至關重要,國外一些國家早已從事相關技術的研究和開發,并將此類產品裝備到特定的作戰場合[1]。
本文所研究的手持式無線通信終端可以配套應急指揮通信車使用,當應急指揮通信車駐車執行任務時,多個用戶分別攜帶手持式無線通信終端分散作業,能夠進行本地定位導航、實時數據采集,并將現場實時態勢信息無線傳輸到應急指揮通信車指控平臺,供指揮員決策使用。該終端采用高性能嵌入式工業級處理器Freescale i.MX53構建主控平臺,選用嵌入式操作系統Android 7.0,集成了顯控模塊、GPS/北斗模塊、數據采集模塊、無信通信模塊等,通過軟硬件合理設計,滿足了作戰實際使用需求。
2 終端系統設計
本文研究了一種性能和功能要求都很高的手持式無線通信終端,該終端不僅具備通用手持終端的功能要求,而且還具備定位導航、數據采集和無線通信等功能,能夠滿足特種應用場合多種通信需要。
終端設計有主控模塊、顯控模塊、GPS/北斗模塊、數據采集模塊和無信通信模塊。主控模塊構建系統主控平臺,顯控模塊提供系統顯示和按鍵輸入功能。通過地圖導航定位軟件實現定位導航、態勢共享等功能;使用數據采集軟件實現現場環境參數、圖片圖像等實時采集、態勢感知功能,與紅外熱成像結合使用,可在夜間采集現場紅外圖像,通過圖像融合能夠實現多源信息采集融合處理功能;采用通用SLIP串口通信協議實現穩定可靠的無線數據通信傳輸。系統原理框圖如圖1所示。

圖1 系統原理框圖
2.1 主控模塊設計
主控模塊是基于i.MX53系列處理器的嵌入式系統模塊,為嵌入式應用提供可靠的心臟。該模塊采用小型化、低功耗的設計風格,同時模塊化的設計減輕了開發工作[2]。i.MX平臺支持多種系統啟動模式,為設計帶來更多的靈活性,板載64GB eMMC存儲芯片,完美地支持高性能操作系統的同時滿足了多媒體系統對存儲空間的需求。
該模塊可廣泛應用于工業控制、多媒體終端、手持設備等領域,是目前業內高端工業級ARM平臺。i.MX53系列處理器是Freescale開發的基于ARM Cortex?-A8核的工業級CPU,其理想的性能和超低功耗可滿足高端、高級應用的嚴苛要求。
2.2 顯控模塊設計
顯控模塊主要提供屏幕顯示和鍵盤控制功能。
屏幕顯示由OLED顯示屏實現,同TFT-LCD相比,OLED是主動發光而不需背光源的顯示器,具有高對比度、寬視角、高發光效率、快速響應、低工作電壓、超輕薄等優勢。更重要的是OLED環境適應性要遠遠優越于液晶顯示,可耐受的溫度區間達到-40℃~85℃溫度范圍[3]。因此OLED顯示屏用在軍用手持式無線通信終端領域具有極大的優勢。
2.3 GPS/北斗模塊設計
GPS/北斗模塊采用CC50-BG衛星導航模塊,同時支持BD2 B1和GPS L1兩個頻點,并行雙32通道。模塊體積小,系統集成簡單方便。主要為手持式無線通信終端提供本地雙模定位、實時地圖導航功能。CC50-BG衛星導航模塊是基于導航SOC芯片ProGee II的一款小體積,多系統、高靈敏度,低功耗,易集成的模塊產品,可以實現機動載體的實時高精度三維定位、三維測速、精確授時,廣泛應用于航運、公路交通、車載導航、手持及物品跟蹤等領域[4]。
2.4 數據采集模塊設計
數據采集模塊實現對現場環境參數和圖片音視頻采集功能。現場環境參數包括現場溫度、氣壓、濕度等參數。溫度傳感器采用智能溫度傳感器DSI8B20,采集的數據可直接送入微處理器而無需AD轉換,能直接讀出被測溫度[5]。濕度傳感器采用HIH3610,是帶溫度補償的濕度傳感器。氣壓傳感器采用MAX4115AP,是帶有片上信號調理及溫度補償功能的絕對壓強傳感器[6]。音視頻采集包括音頻采集和圖片圖像采集,音頻采集通過麥克風實現音頻輸入,圖片圖像采集通過終端集成攝像頭將攝取的圖片圖像數據經視頻壓縮處理后傳輸到應急指揮通信車[7]。
2.5 無線通信模塊設計
無線通信模塊設計了一個450MHz~460MHz的數字通信收發信道模塊,射頻收發芯片選用CC1100,主要通過無線信道傳輸控制命令和數據信息。無線通信模塊由功放單元、信道單元及天線單元組成,其原理框圖如圖2所示。
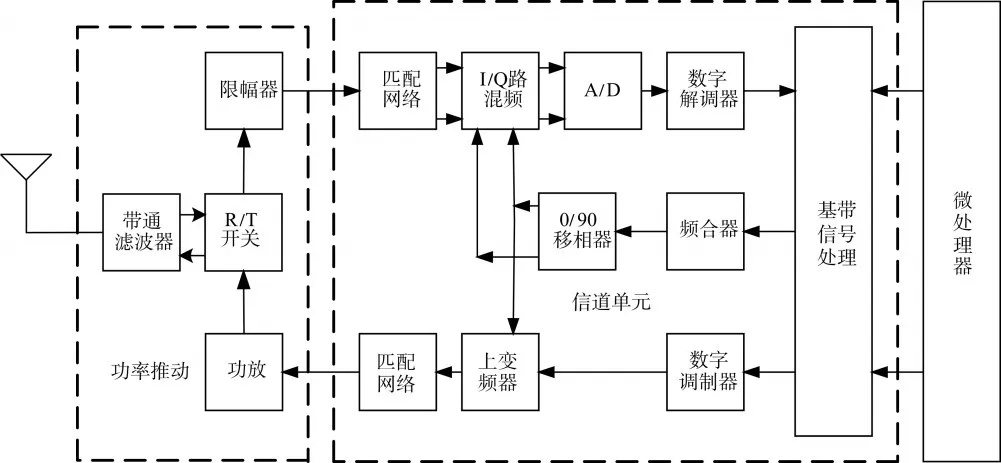
圖2 無線通信模塊原理框圖
無線通信模塊工作在接收時,天線接收空間的信號,經預選濾波器選頻后經收發開關切換至收通道,通過balun網絡轉變為平衡信號后送至I/Q路混頻,得到203KHz的I/Q路中頻信號,中頻信號經A/D轉換器送數字解調器進行解調,再經基帶信號處理[8],解擾、解交織、FEC解碼,還原發端的數據信息,送往檢測終端的無線通信模塊微處理器進行顯示處理。
無線通信模塊工作在發射時,由微處理器發來的數據信息,經信道單元的基帶信號處理器進行FEC編碼、交織、加擾,送往數字調制器后直接進行上變頻。射頻信號經balun網絡后轉變成單端信號,將其送至功率推動單元放大后通過收發開關送給天線發射出去。
3 無線組網通信設計
3.1 組網方式
采用有中心星型網,由主站和從站組成通信系統。本文采用一個主站,帶九個從站,主站和各從站通信,從站之間不能相互直接通信,采用分時輪詢方式進行通信組網[9]。主站初始化后,設定網絡成員數目(1~9),然后分時逐一向各個從站發送詢問信息,各從站根據需要,進行相應的命令請求;待主站完成命令的執行,主站回發相應的結果。
3.2 通信狀態機
CC1100通過標準的 4線 SPI總線(SI、SO、SCLK、CSn)接口和控制器相連,收發的數據信息、控制命令以及芯片的工作模式的設置、讀/寫緩存數據、讀/寫狀態寄存器、芯片測試等都通過該接口進行交互[10]。對CC1100狀態機的控制就是通過對這些命令寄存器和配置/狀態寄存器的讀寫來實現。片內部分配置/狀態寄存器和硬件上測試接口相結合,可完成芯片的測試功能[11]。
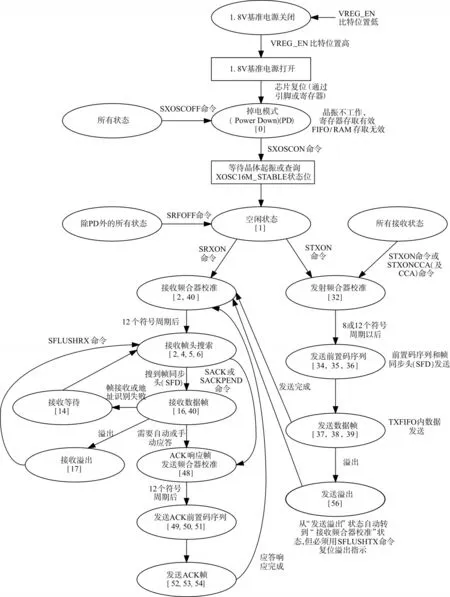
圖3 無線通信狀態機狀態轉換圖
CC1100內置一個可以在不同操作狀態(模式)之間轉換的狀態機[12]。應用該狀態機,通過控制器發送控制命令或內部事件的發生來切換至相應的工作狀態。其射頻控制的狀態轉換圖如圖3所示。這里借用系統狀態寄存器FSMSTATE中讀出的狀態字(方括號內的數字)作為各個狀態的標識。
3.3 數據幀格式設計
送入無線通信模塊數字調制器的數據幀格式如圖4所示。原始數據域數據經用戶可選擇添加的字節長度和地址字節,經無線通信模塊的包處理硬件首先進行CRC-16校驗并將2字節的校驗碼添加在數據域后面,其后自動插入前置碼序列和同步頭,送入數字調制器。

圖4 數據幀格式
手持式無線通信終端主站、從站和無線通信模塊間傳輸數據域(用戶有效載荷)信息,最長60字節一幀。用戶有效載荷幀格式采用SLIP協議,SLIP是一個簡單的面向字符的協議,在每個用戶信息幀的首尾各加一個特殊的標志字節END,封裝成為SLIP幀[13]。標識字節END的編碼為(C0H)。
4 終端軟件設計
4.1 終端應用軟件
終端系統軟件可分為地圖定位導航、數據采集處理和信息傳輸交換軟件。地圖定位導航軟件主要提供現場地圖、實時導航以及態勢處理;數據采集處理軟件主要實現現場數據采集,包括通過攝像頭采集現場圖像數據,并對數據進行信息融合、封包處理;信息傳輸交換主要實現串口、網口傳輸及態勢信息共享功能,可將現場實時信息無線傳輸到應急指揮通信車,供指揮員決策使用。
1)地圖定位導航軟件設計
用戶通過GPS/北斗獲得當前位置的經緯度、速度、方向、當前所在地區的時間等信息。終端自動計算出目的地與當前用戶位置的距離,并計算出到達目的地的最短或最優路徑,并在終端態勢地圖上標出,作為用戶的參考前進路線[14]。電子地圖上疊加態勢表示層實時顯示現場態勢,態勢圖元包括位置、報文、音頻、視頻等信息,并可實現現場態勢由應急指揮通信車指控平臺轉發共享。
2)數據采集處理軟件設計
終端具備現場環境數據實時采集功能,可通過USB和串口實時采集現場數據,連接攝像頭對態勢目標進行圖片圖像采集,分別在白天和夜晚(通過紅外實現)兩種場景進行攝取,通過融合處理實現圖像融合。通過對態勢目標位置和不同場景圖片圖像進行現場態勢采集,從而滿足態勢感知、多源信息融合處理需求。圖片按JPEG編碼壓縮,圖像以H.264格式碼流存儲和傳輸。
3)信息傳輸交換軟件設計
信息傳輸交換包括通信報文、短消息、現場態勢等方面信息交互和態勢共享,通過終端串口、網口實現數據傳輸,將現場實時采集信息無線傳輸到應急指揮通信車指控平臺,供指揮員決策使用。終端具備通信報文、短消息編輯、存儲、收發等功能,由終端唯一地址識別碼進行通信。現場采集態勢信息可以通過指控平臺實時轉發終端位置、圖元信息等,實施區域內態勢實時信息共享。
4.2 無線通信控制軟件
無線通信控制軟件為嵌入式軟件設計,主要完成原始數據接收和發送、對CC1100初始化及工作參數、波道頻率等設置功能。
無線發送:控制程序接收原始數據信息,進行組幀,通過SPI總線發往CC1100的發送FIFO緩沖區,同時控制CC1100的發射狀態,進行數據發送。
無線接收:控制程序控制從CC1100的接收FIFO緩沖區中讀出數據信息,拆包,還原出發端的數據信息,完成數據傳輸的接收。
波道設置:控制程序接收手持式無線通信終端的波道設置命令和波道號,控制CC1100內部頻率合成器,切換到相應的波道頻率上來進行射頻信號的收發。無線通信模塊可以預置100個波道頻率。
控制軟件采用C語言和匯編語言混合編程,嵌入到手持式無線通信終端主控芯片軟件中,與之一起完成數據信息和控制信息的交互。無線通信控制軟件實現如圖5所示。
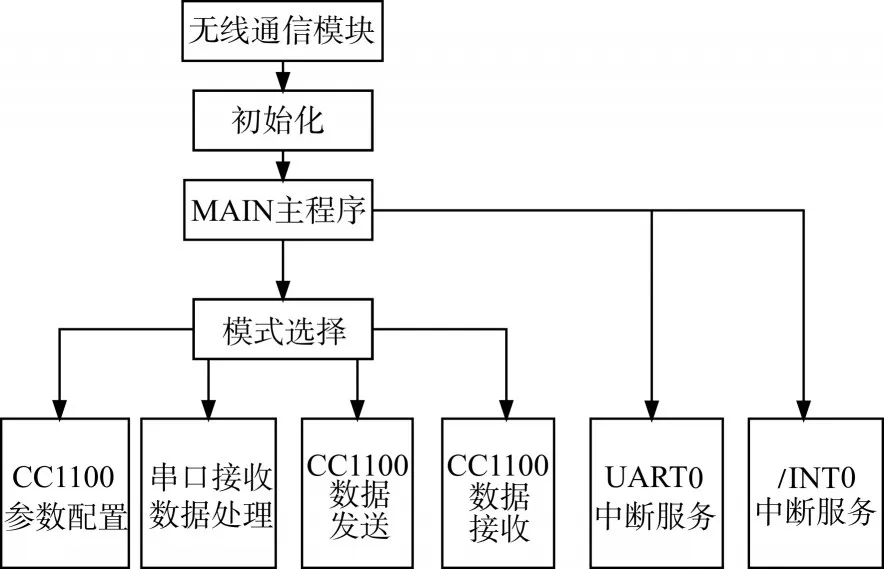
圖5 無線通信控制軟件實現框圖
模塊接電初始化后,CC1100參數配置單元完成對CC1100工作寄存器的參數進行配置,串口接收數據處理單元完成對串口接收中斷所得的命令、數據進行解析處理,CC1100數據發送單元完成對串口接收的需無線發送的信息進行射頻發射處理,CC1100數據接收單元完成對空間無線接收到的信息進行處理[15],UART0中斷服務單元完成對核心模塊單元收、發信息傳輸處理,/INT0中斷服務單元完成對CC1100接收到或發送出一幀信息的指示進行處理。
5 終端實現與測試
5.1 終端功能模塊實現
通過方案設計、樣機設計和樣機試制過程,分階段完成了各功能模塊的軟硬件設計開發任務,實現了手持式無線通信終端定位導航、數據采集和無線通信等功能,滿足了作戰場合多種通信需要。圖6所示為終端主控模塊實物圖,圖7所示為終端無線通信模塊實物圖。
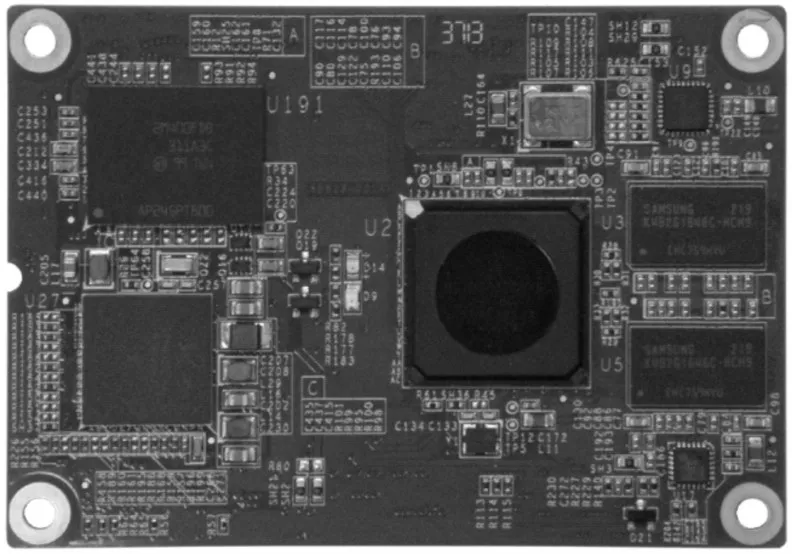
圖6 終端主控模塊實物圖

圖7 終端無線通信模塊實物圖
5.2 終端通信距離測試
終端通過波道設置命令“C0H,05H,(CBH,00H,01H,波道號(0~64H)),XOR校驗字,C0H”、功率設置命令“C0H,05H,(CAH,00H,01H,功率代碼(0~9)),XOR校驗字,C0H”、數據發送命令“C0H,字節長度(n),(數據 1,數據 2,…,數據n-1),XOR校驗字,C0H”進行無線通信距離測試。
陪試設備采用標通用計算機RS232標準串口外接無線通信模塊,38400bps,200ms間隔,采用1.8m折疊天線;手持式無線通信終端采用內置無線通信模塊,38400bps,200ms間隔,采用標配短波天線。拉距測試數據記錄表如表1所示。

表1 拉距測試數據記錄表
通過上述測試,通信距離在1km時通信不丟包,通信距離在2km時設置為中功率、大功率通信不丟所,通信距離在3km時設置為大功率時通信不丟包,滿足預定設計要求,整機無線通信設計滿足技術指標要求。
5.3 無線通信模塊性能指標測試
輸出功率測試:終端從天線口通過衰減器連接頻譜儀,將無線通信模塊設置為大功率發射測試常發狀態,測試結果表明,輸出功率不低于500mW。
接收靈敏度測試:采用兩臺終端進行測試,一臺作為發射測試終端,另一臺作為待測終端。先從發射測試終端天線口連接頻譜儀,測試出輸出電平值;再將發射測試終端通過可調衰減器連接待測終端,通過調節衰減器衰減量[16],使得待測終端接收測試數據誤包率為1%,通過衰減器的衰減量推算出待測終端天線接收電平,能夠滿足不高于-80dBm指標要求。
6 結語
本文完成了惡劣環境下終端系統主控模塊、顯控模塊、GPS/北斗模塊、數據采集模塊和無線通信模塊設計,實現了地圖導航定位、數據采集處理和信息傳輸交換軟件設計,重點設計了無線通信控制程序,開展了無線組網方式、數據幀格式設計和軟件模塊化設計。由于時間進度限制,本文所研究的手持式無線通信終端,沒有采用GPRS、GSM、4G等移動通信方式,不能與民用領域移動互聯,不具備通用性。這主要從軍用安全保密需要考慮,將無線通信模塊設計為專用無線通信模塊,組建專用無線網絡,組網通信保密性強。
參考文獻
[1]陳小擁.嵌入式軍用多功能手持終端系統的研制[D].南京:南京航空航天大學,2008.
[2]孫秀超.多通道地震動信號采集與處理系統的研究與實現[D].南京:南京理工大學,2007.
[3]蔡得貴.微透鏡陣列在有機發光器件中的應用研究[D].武漢:華中科技大學,2013.
[4]郝瀟敏.基于北斗衛星船載導航系統研究[D].大連:大連海事大學,2012.
[5]黃健,張杰,吳延海.機場導航站綜合監控系統的前端采集裝置設計[J]. 電子技術應用,2010(8):110-113.
[6]何晶.集成一體化干濕球溫濕度傳感器的研究[J].中國新技術新產品,2011(19):146-147.
[7]劉潔,肖政宏,張曉虎.基于WLAN的智能監控系統設計[J].微計算機信息,2007(2):16-16.
[8]姜愛鵬.QAM解調芯片中初始解調電路的設計及實現[D].南京:東南大學,2007.
[9]劉兵.基于儀表網絡模式的發油系統[J].儀表技術與傳感器,2000(3):14-16.
[10]柳海龍.WSN技術在多Agent系統中的應用[D].濟南:山東建筑大學,2011.
[11]吳聰,謝虎.基于ARM Cortex-M3的高速誤碼測試系統設計[J].電視技術,2013(5):202-205.
[12]商士棟.基于CC1100的無線傳感器網絡系統研究[D].武漢:武漢科技大學,2008.
[13]孫志偉.電臺前面板單元自動測試系統的設計與實現[D].天津:天津大學,2011.
[14]任亮.嵌入式戰場信息處理終端系統的研制[D].南京:南京航空航天大學,2009.
[15]文樺,張亞軍.金屬氧化鋅避雷器在線監測系統的設計[J].信陽師范學院學報(自然科學版),2014(1):117-120.
[16]張宸.超短波無線電發射機常規電性能指標測試方法淺析[J]. 信息通信,2014(3):197-199.
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
中華手工(2017年2期)2017-06-06 23:00:31
Coco薇(2017年5期)2017-06-05 08:53:16
中外會展(2014年4期)2014-11-27 07:46:46
舒適廣告(2008年9期)2008-09-22 10:02:48
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
