反艦導(dǎo)彈的超前動(dòng)態(tài)抗飽和控制器設(shè)計(jì)與仿真?
2018-05-29 11:50:28潘長鵬趙紅超
艦船電子工程 2018年5期
關(guān)鍵詞:系統(tǒng)設(shè)計(jì)
潘長鵬 趙紅超 王 亭
(海軍航空大學(xué) 煙臺(tái) 264001)
1 引言
控制系統(tǒng)的Windup現(xiàn)象,是由于被控對(duì)象的輸入受限,使得被控對(duì)象的實(shí)際輸入與控制器的輸出不相等,引起閉環(huán)系統(tǒng)響應(yīng)變差(如超調(diào)變大、調(diào)節(jié)時(shí)間變長、甚至系統(tǒng)失去穩(wěn)定性)的現(xiàn)象。為了克服Windup現(xiàn)象,保證控制系統(tǒng)的良好品質(zhì),需要在控制器設(shè)計(jì)中加入抗飽和(Anti-Windup)設(shè)計(jì)算法[1]。國內(nèi)外研究者針對(duì)工業(yè)控制系統(tǒng)的輸入受限問題已進(jìn)行了大量研究,提出了許多不同形式的抗飽和控制器設(shè)計(jì)算法[2~7]。
反艦導(dǎo)彈的過載控制系統(tǒng)中同樣存在Windup現(xiàn)象,由于能量有限或者機(jī)械強(qiáng)度限制,執(zhí)行機(jī)構(gòu)的工作存在飽和約束[8~9]。當(dāng)執(zhí)行機(jī)構(gòu)工作達(dá)到飽和值時(shí)將會(huì)導(dǎo)致有效控制力矩顯著不足,進(jìn)而引起導(dǎo)彈控制系統(tǒng)品質(zhì)下降甚至不穩(wěn)定。前期我們對(duì)導(dǎo)彈控制系統(tǒng)抗飽和設(shè)計(jì)方案進(jìn)行了初步研究,通過仿真分析發(fā)現(xiàn),當(dāng)采用靜態(tài)抗飽和算法時(shí),雖然能夠減小系統(tǒng)輸入量的大小,但是減小以后的值仍然超過飽和值,執(zhí)行機(jī)構(gòu)并沒有脫離飽和工作狀態(tài)。當(dāng)采用動(dòng)態(tài)抗飽和算法時(shí)能夠在一定程度上將系統(tǒng)輸入量減小到飽和值以下,使執(zhí)行機(jī)構(gòu)飽和工作狀態(tài)時(shí)間減小52%以上。那么,有沒有更好的抗飽和算法能夠使執(zhí)行機(jī)構(gòu)完全脫離飽和工作狀態(tài)呢?
文獻(xiàn)[10~11]對(duì)抗飽和機(jī)構(gòu)的三種激活方式進(jìn)行了詳細(xì)研究,即立即激活方式、超前激活方式和滯后激活方式。通過仿真結(jié)果比較,證明了超前激活方式的抗飽和性能優(yōu)于立即激活方式和滯后激活方式,而且,超前激活方式還能夠擴(kuò)大系統(tǒng)原點(diǎn)的吸引域。借鑒上述研究成果,本文將前期設(shè)計(jì)的動(dòng)態(tài)抗飽和算法改進(jìn)為超前激活方式(簡稱為超前動(dòng)態(tài)抗飽和算法),進(jìn)一步研究反艦導(dǎo)彈過載控制系統(tǒng)中的超前動(dòng)態(tài)抗飽和控制器設(shè)計(jì)方案,以實(shí)現(xiàn)導(dǎo)彈執(zhí)行機(jī)構(gòu)完全脫離飽和工作狀態(tài)的目標(biāo)。
2 反艦導(dǎo)彈運(yùn)動(dòng)模型
超聲速反艦導(dǎo)彈具有軸對(duì)稱氣動(dòng)外形,其俯仰通道和偏航通道的結(jié)構(gòu)是基本一致的;滾動(dòng)通道僅起穩(wěn)定作用,維持滾動(dòng)角為零。俯仰通道和偏航通道采用過載控制系統(tǒng),下面以俯仰通道為例進(jìn)行研究。反艦導(dǎo)彈采用了沖壓發(fā)動(dòng)機(jī),其正常工作要求反艦導(dǎo)彈的攻角和側(cè)滑角都為小角度,在小角度條件下可以進(jìn)行線性化處理,從而建立反艦導(dǎo)彈俯仰通道的運(yùn)動(dòng)模型如下:

式中:為建模誤差,都是有界量;彈體過載ny為系統(tǒng)輸出量;其它各個(gè)變量的物理意義參見《導(dǎo)彈飛行力學(xué)》[12]。
將作為執(zhí)行機(jī)構(gòu)的舵機(jī)系統(tǒng)視為一階慣性環(huán)節(jié),即
式中:τ為舵機(jī)系統(tǒng)的時(shí)間常數(shù);kδ為放大系數(shù);u為系統(tǒng)輸入量,即送入舵機(jī)的電壓信號(hào)。實(shí)際上,u是受到飽和限制的。

式中:uc是控制器的輸出,即控制算法解算得出的值;umax為送入舵機(jī)的電壓最大值。uc經(jīng)過飽和環(huán)節(jié)后成為實(shí)際的系統(tǒng)輸入u。為了便于分析,在運(yùn)動(dòng)模型建立時(shí)先不考慮飽和環(huán)節(jié)。
將式(1)的第3個(gè)方程代入第1個(gè)方程,整理可得
對(duì)ny求導(dǎo),并將式(2)、式(4)代入,整理可得
利用容易測量的導(dǎo)彈狀態(tài)量過載ny和角速度ωz來設(shè)計(jì)控制系統(tǒng),以ny和ωz的線性組合構(gòu)造組合狀態(tài)量ξm,并將其作為系統(tǒng)的新輸出量[8~9]

對(duì)ξm求導(dǎo),并將式(5)和式(1)的第2個(gè)方程代入,整理可得

式中:
f(x)和g(x)為已知量;ΔΣ稱為“匯總不確定項(xiàng)”,由于α是不可測的未知量,因此含有α的項(xiàng)也是不確定項(xiàng)。
3 擴(kuò)展?fàn)顟B(tài)觀測器設(shè)計(jì)
針對(duì)匯總不確定項(xiàng),采用擴(kuò)張狀態(tài)觀測器來設(shè)計(jì)估計(jì)器。將匯總不確定項(xiàng)ΔΣ看作是未知的被擴(kuò)張的狀態(tài)變量:ξm2=ΔΣ,并設(shè)其中:ζ(t)是未知函數(shù),由此式(7)變換為
擴(kuò)張狀態(tài)觀測器設(shè)計(jì)為[13]
式中:β01>0,β02>0,0<λ<1,0<h<1;fal函數(shù)的表達(dá)式為
設(shè)e2=z2-ξm2,由文獻(xiàn)[13]的研究可知,當(dāng)系統(tǒng)進(jìn)入穩(wěn)態(tài)時(shí),估計(jì)誤差滿足:

因此,只要選取β02足夠大于ζ(t)和β01,這些估計(jì)誤差都會(huì)很小;從而擴(kuò)張狀態(tài)觀測器中的狀態(tài)z2能夠很好地估計(jì)匯總不確定項(xiàng)ΔΣ。因此,在下面的控制器設(shè)計(jì)中將以z2代替式(7)中的ΔΣ。
4 控制器設(shè)計(jì)
控制器設(shè)計(jì)采用國內(nèi)外研究者們常用的二步法設(shè)計(jì)方法,即首先不考慮執(zhí)行機(jī)構(gòu)的飽和限制,設(shè)計(jì)出滿足系統(tǒng)性能指標(biāo)的標(biāo)準(zhǔn)控制器;然后加入超前動(dòng)態(tài)抗飽和補(bǔ)償算法,克服非線性飽和因素引起的不良影響,起到抗飽和的作用。
4.1 標(biāo)準(zhǔn)控制器設(shè)計(jì)
首先不考慮執(zhí)行機(jī)構(gòu)的飽和限制,認(rèn)為u=uc。考慮到滑模控制方法對(duì)參數(shù)攝動(dòng)和外界干擾等具有強(qiáng)魯棒性,下面采用滑模控制方法來設(shè)計(jì)標(biāo)準(zhǔn)控制器。設(shè)ny,ωz,ξm的指令信號(hào)分別為nyc,ωzc,ξmc;則

ξm的跟蹤誤差定義為

考慮到系統(tǒng)(7)的相對(duì)度為1,選取滑模面為

顯然,當(dāng)系統(tǒng)狀態(tài)軌跡到達(dá)滑模面時(shí)跟蹤誤差也就收斂到零了。對(duì)式(17)求導(dǎo),并將式(7)代入可得

為了使系統(tǒng)狀態(tài)軌跡在有限時(shí)間內(nèi)到達(dá)滑模面,并且在到達(dá)過程中具有良好的動(dòng)態(tài)品質(zhì),采用如下的指數(shù)趨近律:

式中:k1>0,k2>0,sgn(s)為符號(hào)函數(shù)。
聯(lián)立式(18)和式(19)可以解得

在實(shí)際應(yīng)用中,為了削弱滑模控制的抖振現(xiàn)象,通常對(duì)符號(hào)函數(shù)sgn(s)進(jìn)行連續(xù)化處理,以連續(xù)函數(shù)替代sgn(s),其中:ε為一小正數(shù)。
4.2 超前動(dòng)態(tài)抗飽和控制器設(shè)計(jì)
前面設(shè)計(jì)標(biāo)準(zhǔn)控制器時(shí)沒有考慮飽和環(huán)節(jié),實(shí)際的控制輸入量送入舵機(jī)時(shí)是受到飽和限制的,由式(3)表示。采用超前動(dòng)態(tài)抗飽和算法來抑制飽和環(huán)節(jié)的影響,超前激活方式是在原來的飽和環(huán)節(jié)前面引入一個(gè)人為設(shè)置的飽和環(huán)節(jié),其飽和度低于執(zhí)行機(jī)構(gòu)的飽和度,以此飽和環(huán)節(jié)為基礎(chǔ)設(shè)計(jì)抗飽和補(bǔ)償器。因此,在系統(tǒng)控制輸入達(dá)到飽和值之前該抗飽和補(bǔ)償器已經(jīng)被激活,從而產(chǎn)生抗飽和作用。將超前動(dòng)態(tài)抗飽和補(bǔ)償器加入到標(biāo)準(zhǔn)控制器中,從而構(gòu)建了超前動(dòng)態(tài)抗飽和控制器。
人為設(shè)置的飽和環(huán)節(jié)的輸出ua為
式中:μ>1;即,人為設(shè)置的飽和環(huán)節(jié)的飽和度小于umax。
超前動(dòng)態(tài)抗飽和補(bǔ)償器設(shè)計(jì)為
式中:Aaw、Baw、Caw和Daw為抗飽和參數(shù),它們都是常數(shù);uaw為輸入量;yaw為輸出量。

將yaw加入到原來的滑模控制器中,從而構(gòu)建超前動(dòng)態(tài)抗飽和控制器如下:

5 仿真分析
超聲速反艦導(dǎo)彈在高空飛行時(shí)氣動(dòng)控制效率很低,當(dāng)過載指令信號(hào)突變或者導(dǎo)彈做大機(jī)動(dòng)轉(zhuǎn)彎時(shí),需要執(zhí)行機(jī)構(gòu)提供很大的驅(qū)動(dòng)力矩才能完成控制任務(wù)。由于存在飽和限制,反艦導(dǎo)彈的實(shí)際控制輸入不夠大,與控制器的輸出不一致,進(jìn)而引起Windup現(xiàn)象。
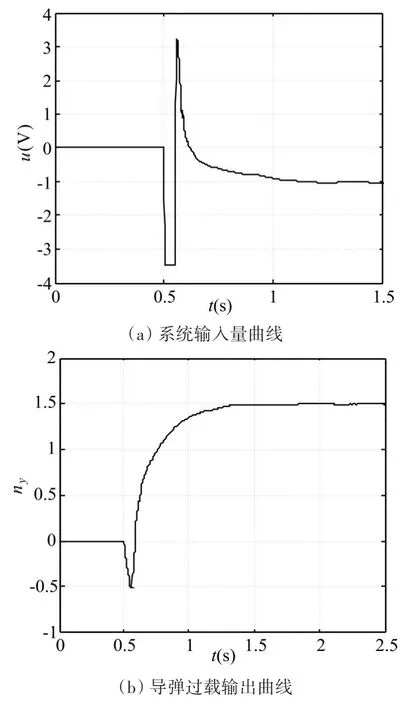
圖1 在特征點(diǎn)1處不加入抗飽和補(bǔ)償器的仿真結(jié)果
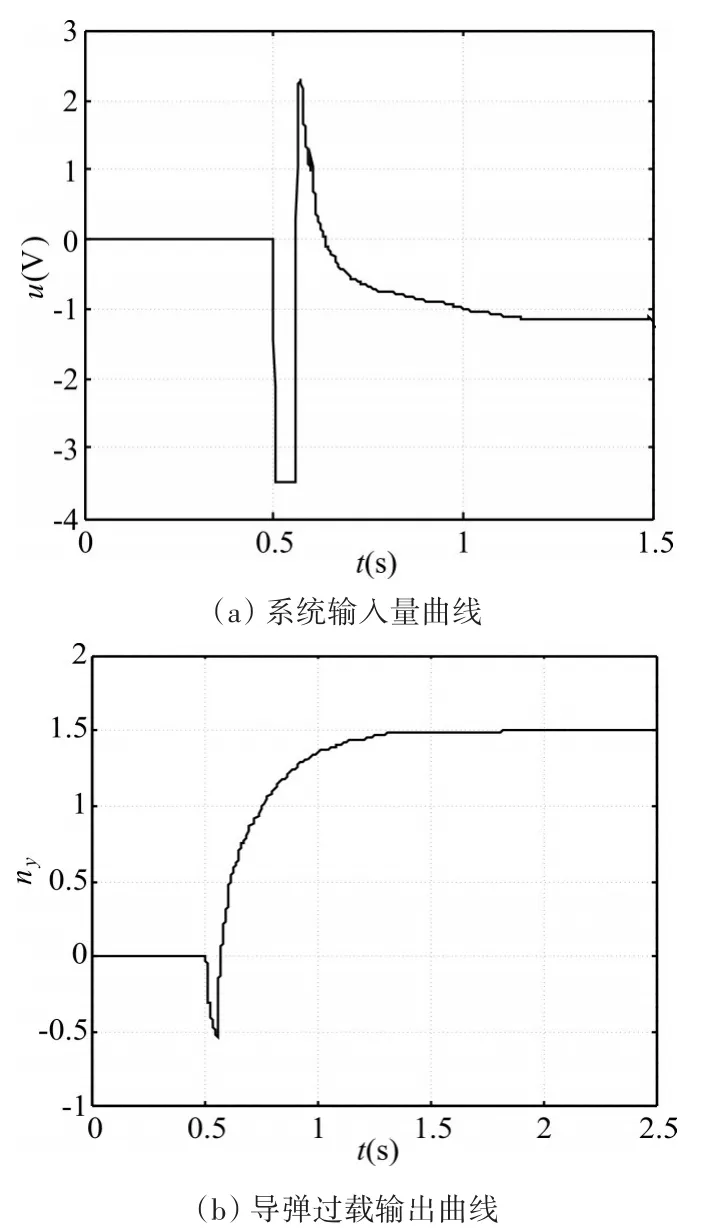
圖2 在特征點(diǎn)2處不加入抗飽和補(bǔ)償器的仿真結(jié)果
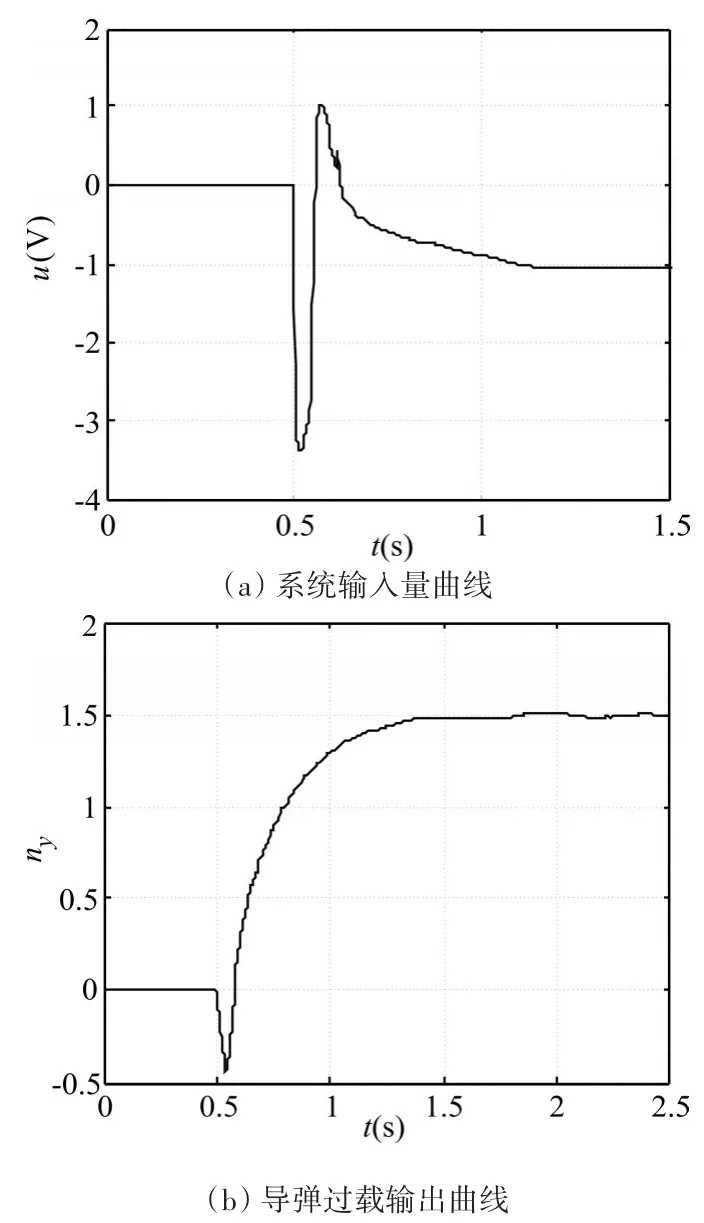
圖3 在特征點(diǎn)1處加入抗飽和補(bǔ)償器的仿真結(jié)果
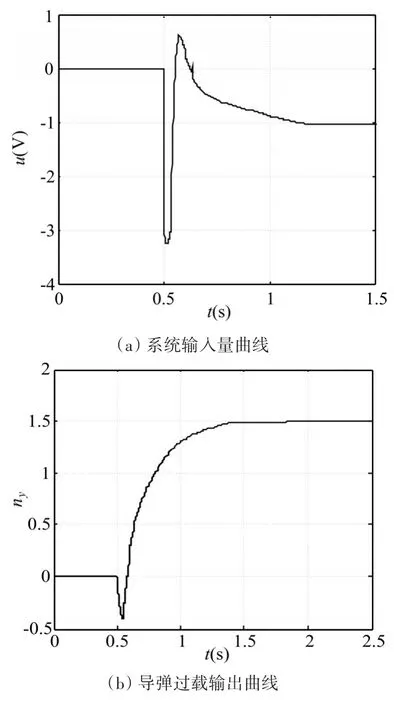
圖4 在特征點(diǎn)2處加入抗飽和補(bǔ)償器的仿真結(jié)果
從反艦導(dǎo)彈飛行高度大于14500m的高空彈道上選取2個(gè)特征點(diǎn)(編號(hào)為1、2)進(jìn)行仿真分析,并且對(duì)不加入和加入超前動(dòng)態(tài)抗飽和補(bǔ)償器兩種情況進(jìn)行仿真對(duì)比。不加入抗飽和補(bǔ)償器時(shí)控制器為式(20),加入抗飽和補(bǔ)償器時(shí)控制器為式(24)。仿真中,反艦導(dǎo)彈俯仰通道運(yùn)動(dòng)模型(1)中的建模誤差假設(shè)為周期為0.6s的正弦函數(shù),其幅值(以A(???) 表 示 ) 分 別 為 :舵機(jī)系統(tǒng)的參數(shù)為:τ=0.05s,kδ=0.12,送入舵機(jī)的電壓最大值為:uδmax=3.5V。選取0.5s啟動(dòng)的幅值為1.5的階躍信號(hào)表示過載指令信號(hào)發(fā)生了突變。通過仿真調(diào)試,確定擴(kuò)張狀態(tài)觀測器的參數(shù)為:β01=170,β02=1800,λ=0.5,h=0.04;超前動(dòng)態(tài)抗飽和控制器的參數(shù)為:μ=1.2,Aaw=-10,Baw=50,Caw=75,Daw=2.0,k1=30,k2=2.15,c=-78,ε=0.05。不加入抗飽和補(bǔ)償器時(shí),2個(gè)特征點(diǎn)處的仿真結(jié)果分別如圖1、2所示。加入超前動(dòng)態(tài)抗飽和補(bǔ)償器時(shí),2個(gè)特征點(diǎn)處的仿真結(jié)果分別如圖3、4所示。
由圖1~圖4的仿真結(jié)果對(duì)比可知,對(duì)于2個(gè)特征點(diǎn)而言,在不加入抗飽和補(bǔ)償器時(shí),導(dǎo)彈系統(tǒng)的執(zhí)行機(jī)構(gòu)都有一段時(shí)間處于飽和工作狀態(tài);而加入超前動(dòng)態(tài)抗飽和補(bǔ)償器后,執(zhí)行機(jī)構(gòu)完全脫離了飽和工作狀態(tài),導(dǎo)彈的過載輸出曲線也基本沒有變化。因此,超前動(dòng)態(tài)抗飽和控制器顯著地減輕了執(zhí)行機(jī)構(gòu)的工作強(qiáng)度,提高了反艦導(dǎo)彈過載控制系統(tǒng)的控制性能。
6 結(jié)語
本文對(duì)超聲速反艦導(dǎo)彈的過載控制系統(tǒng)進(jìn)行了研究。以導(dǎo)彈過載和角速度的線性組合構(gòu)造組合狀態(tài)量,建立了導(dǎo)彈俯仰通道的運(yùn)動(dòng)模型。為了對(duì)系統(tǒng)中的匯總不確定項(xiàng)進(jìn)行有效估計(jì),采用擴(kuò)張狀態(tài)觀測器設(shè)計(jì)了估計(jì)器。針對(duì)執(zhí)行機(jī)構(gòu)飽和問題,提出了將超前動(dòng)態(tài)抗飽和算法加入到控制器設(shè)計(jì)中,即在標(biāo)準(zhǔn)控制器設(shè)計(jì)的基礎(chǔ)上,加入超前動(dòng)態(tài)抗飽和補(bǔ)償器,綜合起來構(gòu)成了超前動(dòng)態(tài)抗飽和控制器。從反艦導(dǎo)彈高空彈道上選取2個(gè)特征點(diǎn)進(jìn)行了仿真分析,仿真結(jié)果表明,不加入抗飽和補(bǔ)償器時(shí)執(zhí)行機(jī)構(gòu)存在飽和工作狀態(tài);而加入抗飽和補(bǔ)償器時(shí)執(zhí)行機(jī)構(gòu)完全脫離了飽和工作狀態(tài),提高了反艦導(dǎo)彈過載控制系統(tǒng)的控制性能。
參考文獻(xiàn)
[1]Tarbouriech S,Turner M.Anti-windup design:an over?view of some recent advances and open problems[J].IET Control Theory and Application,2009,3(1):1-19.
[2]Yang Ming,Niu Li,Xu Dian-Guo.A novel piecewise an?ti-windup design for speed loop PI controller of PMSM ser?vo system[C]//The 14th International Power Electronics and Motion Control Conference,2012:1-4.
[3]李鐘慎,牛彬.一種采用條件技術(shù)的抗飽和補(bǔ)償控制器[J]. 華僑大學(xué)學(xué)報(bào)(自然科學(xué)版),2011,32(1):10-12.
[4]Galeani S,Onori S,Teel A R,et al.A magnitude and rate saturation model and its use in the solution of static an?ti-windup problem[J].Systems&Control Letters,2008,47:1-9.
[5]Song Xiaona,F(xiàn)u Zhumu,and Liu Leipo.Robust stabiliza?tion of state delayed discrete-time Takagi-Sugeno fuzzy systems with input saturation via an anti-windup fuzzy de?sign[J].Chinese Physics-B,2012,21(11):118701:1-118701:8.
[6]Zhao Junjie,Wang Jing,Shen Hao.Dynamic anti-wind?up control design for Markovian jump delayed systems with input saturation[J].Circuits System Signal Process,2013,32:2213-2229.
[7] Li Yuanlong,Lin Zongli.Design of saturation-based switching anti-windup gains for the enlargement of the do?main of attraction[J].IEEE Transactions on Automatic Control,2013,48(7):1810-1816.
[8]趙紅超,高曉冬,范紹里.基于抗飽和補(bǔ)償?shù)膶?dǎo)彈過載控制系統(tǒng)設(shè)計(jì)[J]. 南京理工大學(xué)學(xué)報(bào),2012,36(增刊):154-159
[9]Xianjun Shi,Hongchao Zhao,KewenXu.Dynamic An?ti-windup Design for Missile Overload Control System[J].Applied Mechanics and Materials, 2012: 236-237,273-277.
[10]Wu Xiongjun,Lin Zongli.Design of multiple anti-wind?up loops for multiple activations[J].Science China-In?formation Sciences,2012,44(9):1924-1934.
[11]Wu Xiongjun,Lin Zongli.Dynamic anti-windup design for anticipatory activation:enlargement of the domain of attraction[J]. Science China-Information Sciences,2014,47,012201:1-012201:14.
[12]錢杏芳,林瑞雄,趙亞男.導(dǎo)彈飛行力學(xué)[M].北京:北京理工大學(xué)出版社,2012:5-18.
[13]Han Jingqing.From PID to active disturbance rejection control[J].IEEE Transactions on Industrial Electron?ics,2009,56(3):900-906.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
