高速鐵路無砟軌道長軌精調新方法
2018-05-30 09:03:31胡海波
鐵道勘察 2018年2期
關鍵詞:測量
胡海波
(中國鐵路沈陽局集團有限公司,遼寧沈陽 100013)
1 概述
無砟軌道長軌精調工作在線路鋪設完成,長軌應力放散、鎖定后進行[1],可分為靜態精調和動態調整兩個階段。靜態精調是采用軌道幾何狀態測量儀,根據CPⅢ[2-3]控制點坐標測量軌道的幾何狀態,并模擬分析調整方案,交由外業進行軌道平順性調整,直至滿足規范要求;動態調整指在靜態精調后,根據動檢車獲取的數據,對局部不滿足規范的區域用靜態精調的方法對軌道進行后續的調整[4]。傳統的長軌精調需采用絕對靜態測量方法來采集軌道的靜態數據,以下所提出的新方法僅第一遍精調采用絕對靜態測量模式采集軌道數據(宏觀上掌握軌道的長波情況),第二、三遍精調時,則采用相對動態測量模式獲取軌距、水平、高低、軌向等幾何狀態數據,從而減少外業測量工作量,在保證精調質量的同時提高精調作業的效率。軌道靜態精調是高速鐵路長軌精調的重要環節,主要包括軌道數據采集與分析以及后續的軌道精調等環節。
2 靜態數據采集
軌道的靜態數據采集[5]是長軌精調工作的第一步,采用軌道幾何狀態測量儀對軌道進行精確測量,掌握其幾何狀態,為后續精調工作順利開展提供根本保證。其中包括內外業的準備工作、現場確認和軌道靜態測量等過程。
2.1 內業工作
數據采集作業前,首先需要獲取測量區段的CPⅢ復測評估報告,將控制點的點位信息提取整理后存入全站儀。獲取設計單位的線路參數,利用其平曲線、豎曲線和超高文件資料,建立軌檢小車使用的設計文件(注意檢核投影換帶和長短鏈位置),并導入小車筆記本電腦軟件。
2.2 外業工作
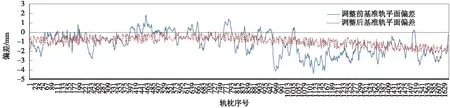
圖2 平面模擬方案調整
對測量區段內的鋼軌表面情況和扣件安裝情況進行全面檢查,確保鋼軌及焊縫處的平順和清潔,線路上擋塊、墊片、彈條的安放符合設計施工要求后方可開始工作。測量前,需劃分各個測量段落,對每個段落內的軌枕進行順序編號,確保軌道精測和精調承軌臺的準確一致。對軌道幾何狀態測量儀進行軌距標定、幾何參數校正、超高傳感器校準等準備工作。所使用的全站儀必須具有自動目標照準功能,每個測站采用8個CPⅢ控制點進行后方交會測量,以測定測站點的三維坐標[6];在軌檢小車的移動過程中,利用全站儀自動跟蹤功能照準軌道幾何測量儀上的棱鏡,以獲得棱鏡的三維坐標;再結合軌道的設計參數以及傾角傳感器和軌距傳感器的實時測量數據,利用線路中心坐標計算模型、軌道點對應線路中線點里程計算模型、平順性參數計算模型與軌檢小車坐標轉換模型,計算并存儲當前軌道實測與設計的各項平順性參數(如圖1)。
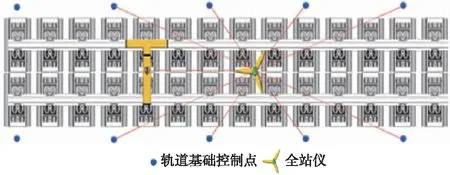
圖1 外業測量模式示意
3 第一遍軌道精調
3.1 軌道扣件系統
采用福斯羅300-1型扣件系統[7],通過不同型號的軌距擋塊和調高墊板,實現±8 mm范圍內的單軌橫向調整和-4~56 mm的高低調整,每級調整量分別為1 mm和0.5 mm。
3.2 靜態數據內業分析
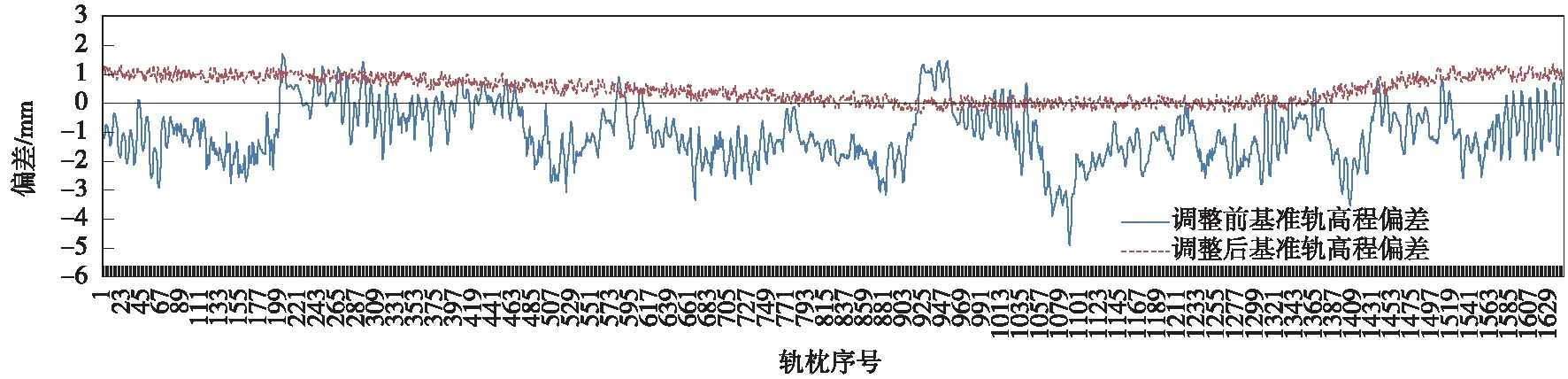
圖3 高程模擬方案調整
在無砟軌道精調作業中,軌道的長、短波平順性是軌道靜態精調的核心部分,也是長軌精調作業中較困難的部分。內業的數據分析主要是對外業測量采集的軌道平面和高程數據中加入模擬調整量來保證軌道的各項平順性指標滿足要求[8],使得調整后軌向和高低的10 m弦長正矢偏差控制在2 mm內,48a(m)基線偏差控制在2 mm/8a(m)以內,480a(m)基線偏差控制在10 mm/240a(m)以內(a為軌枕間距)。調整后軌距偏差介于±1 mm之間,變化率小于1/1 500,水平偏差介于±1 mm之間,扭曲介于±1 mm(基線長3 m)內[9]。在數據分析過程中,采用“先整體、后局部”,“先軌向、后軌距,先高低、后水平,優先保證基準軌平順性”的原則,對平面數據和高程數據分別進行調整[10]。首先應從整體上分析精調前數據,確定總體調整方案,以此來控制長波平順度:①平面調整中,盡可能使調整后的線形位于原始線形走勢的中間位置,有效減少精調工作量以及材料的使用消耗(如圖2所示)。②高程調整時,在控制長波平順性的前提下,根據扣件最大負向調整值控制相對凸起區域的調整量,從而保證后續精調和維護工作的順利進行;對于高程相對較低的區域,應盡量減少調高墊板的使用數量(如圖3所示)。在基準軌的平面高程調整量確定后,再對基準軌進行調整,將軌距和水平調整至限差內;在緩直、直緩點處不得出現反超高,相鄰精調作業單元之間重疊區的模擬調整方案應保持一致。最后,根據模擬調整方案,確定調整部位和扣件規格,匯總成調整量表。
3.3 外業精調作業流程
外業精調作業中,上線作業的人員需要佩帶安全防護用品和調軌設備(見表1),作業過程中需每2 h核實軌溫并根據鎖軌溫度嚴格控制連續松開扣件的個數。作業完成后需進行線路復檢,對扣件漏換、換錯、換反、安置不規范等現象進行排查[11]。
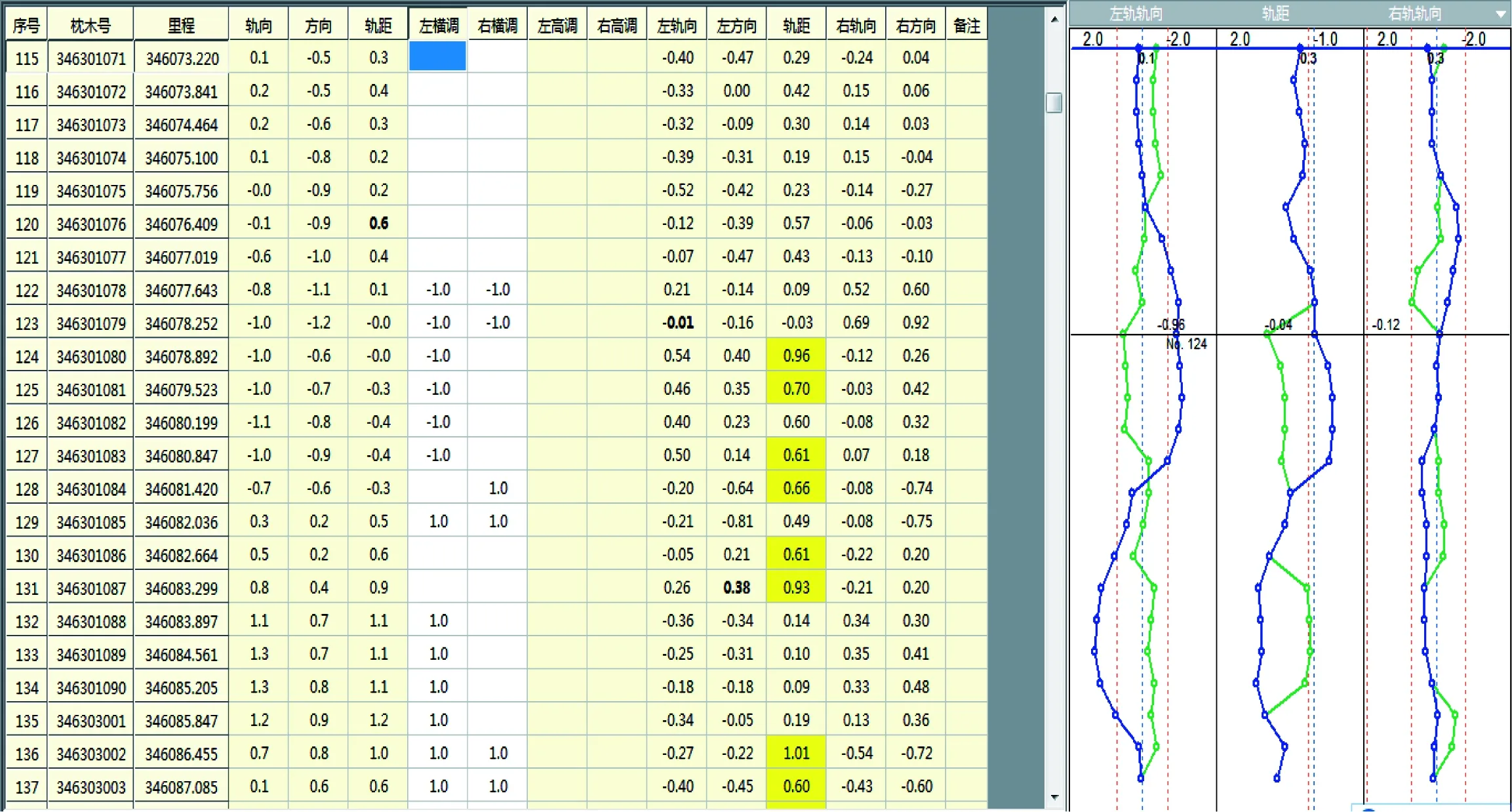
圖4 相對軌檢小車數據分析
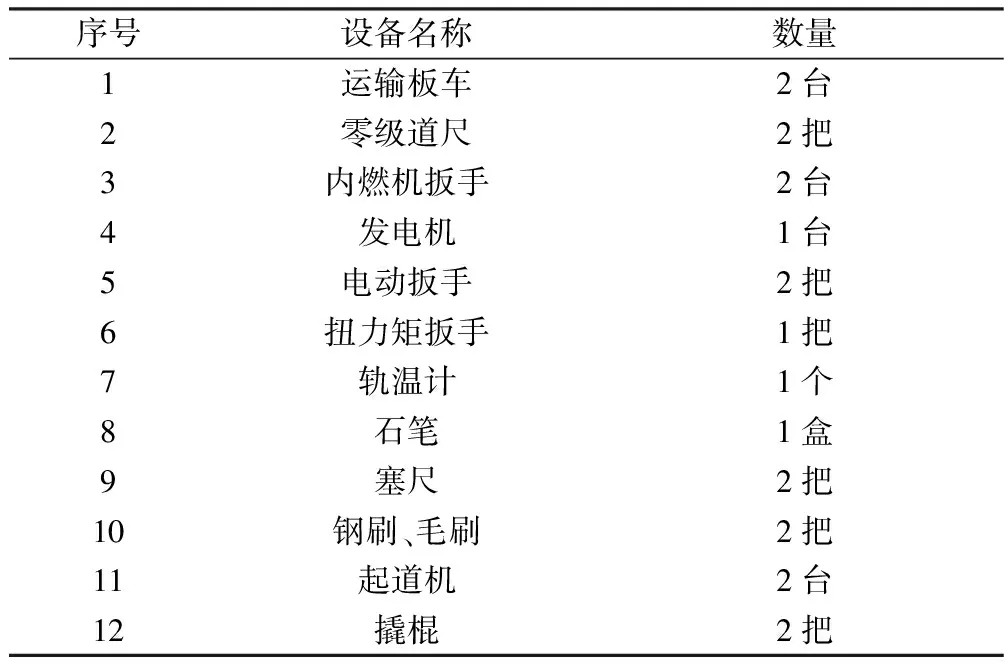
序號設備名稱數量1運輸板車2臺2零級道尺2把3內燃機扳手2臺4發電機1臺5電動扳手2把6扭力矩扳手1把7軌溫計1個8石筆1盒9塞尺2把10鋼刷、毛刷2把11起道機2臺12撬棍2把
4 相對數據采集與第二遍精調
經過第一遍精調后,可將經過應力放散、鎖定后軌道的長波平順性調整至規范要求范圍內,并大幅度提高短波平順性,但仍可能存在扣件更換錯誤或者更換不到位的情況。為了進一步將軌距、水平等幾何尺寸以及軌道的短波平順性調整至規范要求范圍內,需對軌道進行第二、第三遍精調。首先采用標定好的相對軌檢小車對線路進行測量,獲取軌距、水平、10 m軌向、10 m高低、三角坑等軌道狀態數據。數據采集完成后,可生成如圖4所示的軌道波形,然后進行模擬調整并生成調整方案,用于外業的二次精調。二次調整中,用經校準的零級電子道尺記錄調整前后的軌距和水平,檢驗外業調整是否與內業方案一致,從而消除軌距、水平、短波平順性超限等問題。
5 精調質量評價
軌道不平順性質量指數TQI(Track Quality Index)是采用數學統計方法描述區段軌道整體狀態的綜合指標,計算方法為左高低、右高低、左軌向、右軌向、軌距、水平和三角坑七項指標的不平順值在200 m范圍內的標準差之和,如式(1)所示[12]。即TQI數值越小,表示軌道的波動性越小,軌道的平順性越好。表2為國內某客運專線施工里程DK647+000~DK657+000段精調前和經過第一、二、三遍軌道精調的靜態軌道TQI指標數值。經過軌道的第一遍精調,靜態TQI平均值可從5.21降低至2.33,可以看出,第一遍精調使得軌道的各項平順性指標有大幅度提高,但仍存在部分扣件換錯或者更換不到位的情況;第二遍精調后靜態TQI平均值約為1.81;局部地區需經過第三遍精調,方可將軌距,水平、軌向、高低等各項軌道狀態指標進一步優化(平均TQI約為1.51),滿足之后的動態檢測和聯調聯試要求。
(1)
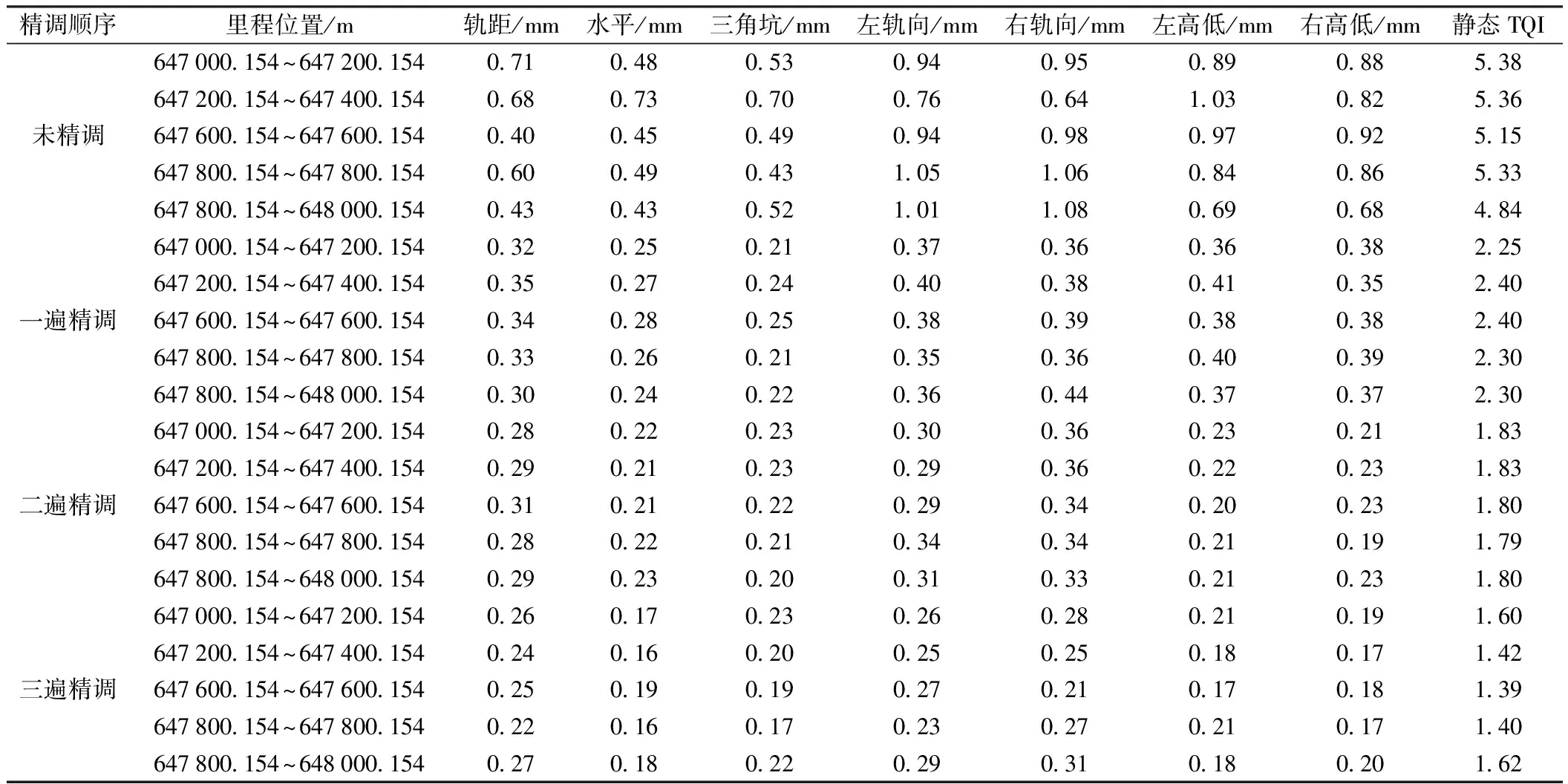
表2 軌道不平順性質量統計
6 結束語
軌道的平順性、穩定性是保證列車高速運行的基礎,長軌精調作業則是保證軌道高平順性的關鍵環節。基于某客運專線的長軌精調作業,提出僅第一遍精調采用絕對靜態測量模式采集軌道數據,從宏觀上保證了軌道的長波平順性,使線路順直;第二、三遍精調時,則采用相對動態測量模式獲取軌道的軌距、水平、短波平順性等內部幾何狀態數據,然后進一步將軌道的相應指標調整至滿足規范要求。相較于每一遍精調均需要采集軌道的絕對靜態數據的傳統長軌精調方法,新方法極大地減少了外業測量工作量,提高了精調作業的效率,很好地控制了軌道精調質量(三遍精調后的軌道靜態TQI值能夠控制在1.6之內),可供相關工作者借鑒。
[1] 周光民.無砟軌道長鋼軌精調技術研究[J].鐵道建筑技術,2011(4):53-58
[2] 劉成龍,楊雪峰,盧建康,等.高速鐵路CPⅢ三角高程網構網與平差計算方法[J].西南交通大學學報,2011,46(3):434-439,450
[3] 徐小左,劉成龍,楊友濤.無砟軌道精調中CPⅢ網點穩定性檢測方法的研究[J].鐵道工程學報,2008(9):21-25
[4] 蔡世昱.高速鐵路無砟軌道軌面不平順整治方法研究[D].成都:西南交通大學, 2013
[5] 張勇,田林亞,王建,等.軌檢小車用于高速鐵路軌道幾何狀態檢測的關鍵問題研究[J].鐵道標準設計,2013(5):5-9
[6] 張忠良,楊友濤,劉成龍.軌道精調中后方交會點三維嚴密平差方法研究[J].鐵道工程學報,2008,25(5):33-36
[7] 錢程.高速鐵路福斯羅W300-1型扣件系統RAMS分析研究[D].成都:西南交通大學,2017
[8] 武峰.高速鐵路無砟軌道精調技術[J].國防交通工程與技術,2011,9(6):63-66
[9] 中鐵二院工程集團有限責任公司.高速鐵路工程測量規范[S].北京:中國鐵道出版社,2010
[10] 都秋麗.高速鐵路長軌精調技術[J].建筑,2014(8)
[11] 陳麟.哈大鐵路客運專線TJ-1標軌道精調綜述[J].鐵道標準設計,2014,58(11):62-68
[12] 張建軍.TQI在鐵路線路養護維修中的指導作用[J].建材發展導向,2013(4)
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
