一種適用于微型無人機(jī)的移動(dòng)MUAV-MTP協(xié)議
2018-05-30 01:39:55鄧嘉輝薄煥仕
計(jì)算機(jī)工程 2018年5期
關(guān)鍵詞:信息
鄧嘉輝,薄煥仕,姚 悅,霍 星
(合肥工業(yè)大學(xué) a.軟件學(xué)院; b.數(shù)學(xué)學(xué)院,合肥 230009)
0 概述
無人機(jī)的移動(dòng)通信控制在近些年發(fā)展迅速,目前,無人機(jī)技術(shù)已經(jīng)跨入到4G時(shí)代。文獻(xiàn)[1]給出了基于4G的無人機(jī)遠(yuǎn)程巡邏系統(tǒng),分別實(shí)現(xiàn)了無人機(jī)端、服務(wù)端和地面控制端的軟件開發(fā)設(shè)計(jì),該系統(tǒng)能夠清晰地顯示視頻信息和飛行狀態(tài)信息。文獻(xiàn)[2]提出了一種考慮3G/4G網(wǎng)絡(luò)特性的多無人機(jī)環(huán)保監(jiān)測任務(wù)調(diào)度,將多無人機(jī)任務(wù)調(diào)度問題建模為團(tuán)隊(duì)定向問題,并使用局部迭代搜索算法對該問題進(jìn)行優(yōu)化求解。文獻(xiàn)[3]對基于多旋翼無人機(jī)和4G的指控系統(tǒng)中繼通信進(jìn)行了研究,分析了如何進(jìn)行地空寬帶無線網(wǎng)絡(luò)與掛載單載波頻域均衡體制4G轉(zhuǎn)信平臺(tái)之間的網(wǎng)絡(luò)互聯(lián)。文獻(xiàn)[4]使用4G網(wǎng)絡(luò)的Android手機(jī)作為地面通信和控制平臺(tái),設(shè)計(jì)一種基于4G網(wǎng)絡(luò)控制的四旋翼飛行器系統(tǒng),該系統(tǒng)具有遠(yuǎn)距離控制、視頻實(shí)時(shí)傳輸、實(shí)時(shí)查看設(shè)備信息等功能。文獻(xiàn)[5]設(shè)計(jì)并開發(fā)了小型無人機(jī)和地面控制站(GCS),使用GSM雙向通信技術(shù)對無人機(jī)進(jìn)行非視距(NLOS)遠(yuǎn)程控制。文獻(xiàn)[6]設(shè)計(jì)和實(shí)現(xiàn)一個(gè)小型低功耗、低成本的半自主飛行固定翼無人機(jī),完成實(shí)時(shí)路徑規(guī)劃、軌跡生成和軌跡跟蹤功能。文獻(xiàn)[7]針對EFIGENIA無人機(jī)設(shè)計(jì)嵌入式多處理器模糊邏輯飛行引導(dǎo)和控制系統(tǒng)方案,實(shí)現(xiàn)無人機(jī)自動(dòng)駕駛、智能飛行。
微型無人機(jī)憑借其體型小、價(jià)格低、控制精準(zhǔn)的優(yōu)勢在快遞物流[8]、線路巡檢[9]、農(nóng)田信息采集[10]等商業(yè)領(lǐng)域取得了廣泛的應(yīng)用。支持微型無人機(jī)的主流協(xié)議為MavLink協(xié)議,該協(xié)議主要用于地面站與微型無人機(jī)之間的通信以及微型無人機(jī)內(nèi)部子系統(tǒng)之間的通信,協(xié)議以消息庫的形式定義了參數(shù)傳輸?shù)囊?guī)則[11]。與其他通信方式不同,移動(dòng)通信具有信道特性差、環(huán)境干擾因素多、頻譜資源少、管理級別高的特點(diǎn)[12]。由于現(xiàn)有MavLink協(xié)議的設(shè)計(jì)主要面向低速率、大數(shù)據(jù)量的消息傳輸,無法滿足移動(dòng)通信的特點(diǎn),另外,此協(xié)議還存在擴(kuò)展性不強(qiáng)、不易于與外部傳感器進(jìn)行通信等問題。
本文從通信協(xié)議的角度對基于移動(dòng)通信的微型無人機(jī)技術(shù)進(jìn)行研究,并提出一種用于微型無人機(jī)自主巡航的新型移動(dòng)通信協(xié)議。
1 MUAV-MTP協(xié)議設(shè)計(jì)
由于不同地區(qū)移動(dòng)網(wǎng)絡(luò)信號強(qiáng)度與可靠性差別較大,因此要求系統(tǒng)能夠適用于不同的傳輸層協(xié)議[13]。為了滿足實(shí)際開發(fā)需求,將MUAV-MTP協(xié)議設(shè)計(jì)為支持TCP和UDP 2種傳輸層協(xié)議,方便用戶的不同選擇。
消息幀結(jié)構(gòu)如表1所示,共分為6個(gè)字段。其中開始標(biāo)志、消息幀序號、消息ID和消息長度字段都是int8_t類型,占用1 Byte。消息幀序號字段的表示范圍是[0,255],在發(fā)送消息幀時(shí)循環(huán)增加。保證消息幀在順序接收執(zhí)行的同時(shí)計(jì)算丟包率,并在應(yīng)答時(shí)指明消息幀的編號。消息ID字段用來指明數(shù)據(jù)字段的解碼方式。針對不同消息所需傳輸參數(shù)相差大的問題,采取消息幀不定長形式,并加入消息長度字段來確保消息幀的完整接收。每個(gè)消息幀的長度范圍介于6 Byte~261 Byte。最后在消息幀末尾加入2 Byte校驗(yàn)位,保證消息幀的正確。

表1 MUAV-MTP消息幀結(jié)構(gòu) Byte
MUAV-MTP消息幀字段及數(shù)據(jù)類型如表2、表3所示。

表2 MUAV-MTP消息幀字段

表3 數(shù)據(jù)類型 Byte
MUAV-MTP協(xié)議中使用的數(shù)據(jù)類型包括字符、整數(shù)、無符號整數(shù)、單精度浮點(diǎn)數(shù)與二進(jìn)制流。考慮到不同硬件平臺(tái)對浮點(diǎn)數(shù)的存儲(chǔ)格式存在差異,并且經(jīng)度、緯度、高度、速度等使用浮點(diǎn)數(shù)進(jìn)行記錄的數(shù)據(jù)的取值范圍較為固定[14]。所以,將浮點(diǎn)數(shù)擴(kuò)大2倍~20倍后,轉(zhuǎn)為32位無符號整數(shù)再進(jìn)行傳輸。通過計(jì)算可知,上述方式傳輸?shù)慕?jīng)緯度及高度的精確度可以達(dá)到0.01 m,飛行速度、角速度等數(shù)據(jù)的精確度也完全可以滿足實(shí)際要求。
基于以上的幀結(jié)構(gòu),本文設(shè)計(jì)出基于TCP/UDP協(xié)議的移動(dòng)無人機(jī)自主飛行通信協(xié)議。滿足通過4G網(wǎng)絡(luò)傳輸數(shù)據(jù)、無人機(jī)遠(yuǎn)程控制、低空巡航等功能需求。同時(shí)保證協(xié)議的輕便性、可擴(kuò)充性與安全性。根據(jù)MUAV-MTP協(xié)議消息幀的設(shè)計(jì),實(shí)現(xiàn)消息幀的封裝流程如圖1所示。

圖1 消息幀的封裝流程
2 消息設(shè)計(jì)
2.1 消息類型
根據(jù)傳送消息內(nèi)容,將消息分為6個(gè)主要類型,如表4所示。其中,身份驗(yàn)證、狀態(tài)信息、命令應(yīng)答的消息幀長度固定,控制命令、路線設(shè)置、傳感信息的消息幀長度不固定。消息類型字段使用uint8_t類型來保存,占用1 Byte,最多可以使用256個(gè)消息類型,留有充足的擴(kuò)展空間。

表4 MUAV-MTP協(xié)議消息類型
2.2 路線設(shè)置消息
路線設(shè)置消息主要是傳輸無人機(jī)巡航路線信息。把巡航路線分割成由若干條線段相連的三維折線,將各個(gè)端點(diǎn)作為巡航點(diǎn)。通過一組巡航點(diǎn)信息來表示整條巡航路線的信息。
如表5所示,路線設(shè)置消息的第1個(gè)字段為巡航點(diǎn)數(shù)量字段,采用uint16_t類型,占2 Byte,最多可以保存2個(gè)~16個(gè)巡航點(diǎn)。第2個(gè)字段為模式字段,用來控制2個(gè)巡航點(diǎn)之間的飛行模式。接下來是一組巡航點(diǎn)信息,其中每個(gè)巡航點(diǎn)信息分為經(jīng)度字段、緯度字段、高度字段、到下一個(gè)巡航點(diǎn)的速度字段和當(dāng)前巡航點(diǎn)的編號字段。其中經(jīng)度、緯度、高度和速度字段采用float類型保存,分別占用4 Byte。巡航點(diǎn)編號字段采用uint16_t類型,占用2 Byte。由此,可以計(jì)算出每個(gè)巡航點(diǎn)占18 Byte,一個(gè)消息幀最多可以保存14個(gè)巡航點(diǎn)。如果路線巡航點(diǎn)的數(shù)量超過單消息幀上限,將分幀傳輸。無人機(jī)接收到路線設(shè)置消息幀后,根據(jù)編號字段依次記錄巡航點(diǎn)信息。

表5 路線設(shè)置消息數(shù)據(jù)格式 Byte
路線設(shè)置消息的另一個(gè)功能是從服務(wù)器向客戶端發(fā)送無人機(jī)附近禁飛區(qū)信息。與巡航路線類似,用一組由原點(diǎn)與半徑組成的圓形區(qū)域來表示禁飛區(qū)。數(shù)量、編號、經(jīng)度和緯度字段意義不變,模式字段取固定值0xFE作為標(biāo)志。使用高度字段保存禁飛半徑、速度字段來保存警告半徑,從而實(shí)現(xiàn)通過路線設(shè)置消息更新客戶端禁飛區(qū)信息。
2.3 狀態(tài)信息與傳感信息
狀態(tài)信息與傳感信息保存的是無人機(jī)的飛行數(shù)據(jù)。將實(shí)時(shí)性要求較高的數(shù)據(jù)使用狀態(tài)信息數(shù)據(jù)格式保存,作為心跳包實(shí)時(shí)發(fā)送。而其他飛行數(shù)據(jù)作為傳感器信息,根據(jù)實(shí)際需求狀況間歇性進(jìn)行發(fā)送。這樣一方面減少數(shù)據(jù)傳輸量,另一方面又保證了必要數(shù)據(jù)的實(shí)時(shí)更新。
如表6所示,狀態(tài)信息數(shù)據(jù)包括飛行狀態(tài)、飛行模式、經(jīng)度、緯度、高度和速度6個(gè)字段。作為心跳包定時(shí)傳輸,更新無人機(jī)狀態(tài)的同時(shí)檢測網(wǎng)絡(luò)連接情況。當(dāng)心跳包時(shí)間間隔為0.2 s時(shí),狀態(tài)信息消息幀大小為24 Byte,計(jì)算心跳包數(shù)據(jù)傳輸率為120 Byte/s。

表6 狀態(tài)信息數(shù)據(jù)格式 Byte
如表7所示,傳感信息消息幀用于傳輸除狀態(tài)信息數(shù)據(jù)外的各種無人機(jī)所搭載的傳感器和硬件設(shè)備的數(shù)據(jù),如攝像頭的視頻數(shù)據(jù)、電池的狀態(tài)數(shù)據(jù)等。對于數(shù)據(jù)量較大的可以采取分幀傳輸,首幀的幀編號為0,每發(fā)送一幀,幀編號加1,增加到65 535幀后返回0。用戶可以根據(jù)需要自行定義傳感器數(shù)據(jù)格式,理論上有效傳輸率可以達(dá)到96%。
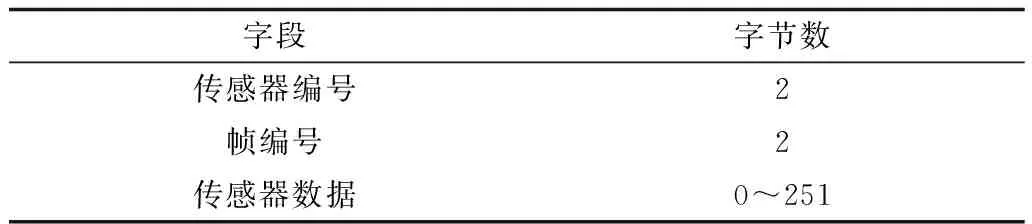
表7 傳感信息數(shù)據(jù)格式 Byte
3 協(xié)議性能評估
3.1 發(fā)送數(shù)據(jù)量的統(tǒng)計(jì)分析
在一般狀態(tài)下,MUAV-MTP協(xié)議傳輸?shù)臄?shù)據(jù)主要是#1狀態(tài)信息消息幀及少量#6傳感信息消息幀(如電池狀態(tài)等)。而MAVLink協(xié)議除了傳輸#0 HEARTBEAT外,也會(huì)大量傳輸#1 SYS_STATUS、#30 ATTITUDE、#32 LOCAL_POSITION_NED、#36 SERVO_OUTPUT_RAW、#74 VFR_HUD和#105 HIGHRES_IMU消息包,表8介紹了各消息包的內(nèi)容。如圖2所示,設(shè)置心跳包發(fā)送頻率為1 Hz,對比MUAV-MTP與MavLink 2種協(xié)議的數(shù)據(jù)傳輸量,可以看出MUAV-MTP協(xié)議的數(shù)據(jù)傳輸量遠(yuǎn)小于MavLink協(xié)議。
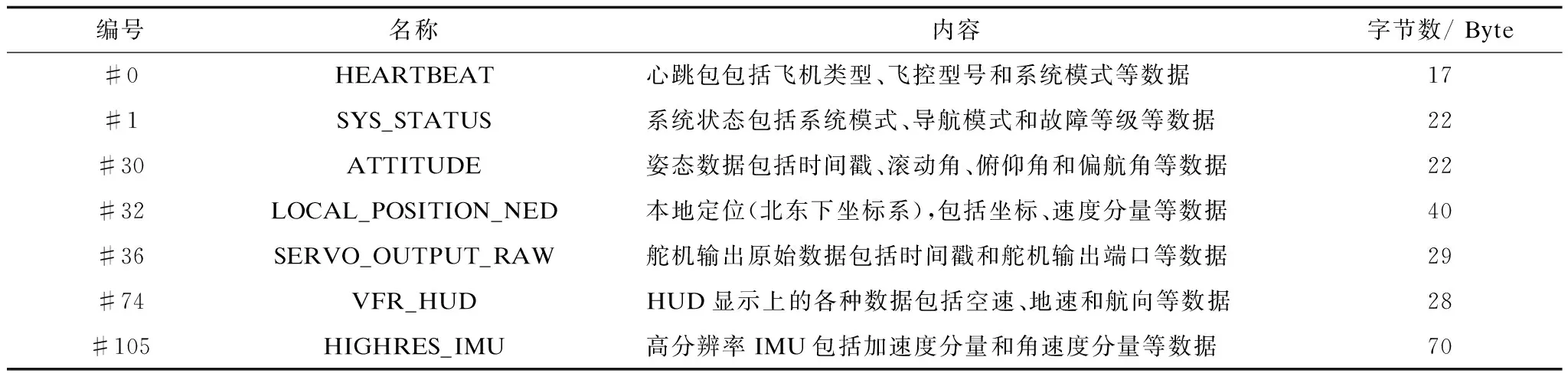
表8 部分MavLink協(xié)議消息格式

圖2 2種協(xié)議的數(shù)據(jù)傳輸量
3.2 路線信息消息幀的驗(yàn)證
分別使用TCP和UDP協(xié)議驗(yàn)證MUAV-MTP路線信息的準(zhǔn)確性和傳輸效率。在實(shí)驗(yàn)中,兩者都可以完整地接收巡航點(diǎn)信息并還原路線信息。隨著巡航點(diǎn)的增多,傳輸巡航點(diǎn)信息所需時(shí)間的變化如圖3所示。TCP與UDP傳輸時(shí)間都成階梯型增長。原因是由于單個(gè)路線信息消息幀最多保存14個(gè)巡航點(diǎn),每發(fā)送超過14個(gè)巡航點(diǎn)就需要分幀發(fā)送,因此TCP傳輸時(shí)間呈現(xiàn)明顯的階梯增長,而UDP傳輸時(shí)間增長趨勢要小于TCP。需要注意的是,在發(fā)送路線信息消息幀時(shí),TCP連接已經(jīng)建立,同時(shí)UDP的丟包率小于5%。相比于主流的MavLink協(xié)議,MUAV-MTP協(xié)議面向于無人機(jī)-服務(wù)器-客戶端的遠(yuǎn)程移動(dòng)網(wǎng)絡(luò)控制模型,如圖4所示。無人機(jī)無需搭載微波接收器,從根本上避免了無人機(jī)通過微波被劫持的情況[15]。同時(shí),通過移動(dòng)網(wǎng)絡(luò)通信,無人機(jī)的IP地址是動(dòng)態(tài)分配的,具有一定的不可預(yù)測性[16],有效地避免了針對無人機(jī)的網(wǎng)絡(luò)攻擊,通信安全性大大提高。

圖3 路線信息消息幀傳輸效率

圖4 無人機(jī)-服務(wù)器-客戶端通信模型
MUAV-MTP協(xié)議針對自主飛行的需求加入了路線設(shè)置和部分控制命令,刪除了MavLink協(xié)議中姿態(tài)調(diào)整等較為底層的內(nèi)容,屏蔽了部分原始數(shù)據(jù),使協(xié)議更為簡潔并具有良好的封裝性。MUAV-MTP協(xié)議傳輸?shù)臄?shù)據(jù)量主要取決于心跳包的發(fā)送頻率及傳感器傳輸?shù)臄?shù)據(jù)量,可以根據(jù)實(shí)際需求進(jìn)行彈性調(diào)整。除此之外,服務(wù)器也可以參與通信,實(shí)現(xiàn)無人機(jī)飛行的實(shí)時(shí)監(jiān)控與記錄保存,幫助完善無人機(jī)飛行的合法化、規(guī)范化。
本文的主要貢獻(xiàn)和創(chuàng)新在于:
1)提出了MUAV-MTP協(xié)議,該協(xié)議基于對MavLink協(xié)議的重新解析,簡化了指令集,更加適用于移動(dòng)通信環(huán)境。
2)在原有協(xié)議基礎(chǔ)上,MUAV-MTP協(xié)議新定義了巡航指令,可以傳輸自主飛行需要的信息和高級命令。
3) MUAV-MTP協(xié)議具有良好的兼容性和魯棒性,能夠更為方便地傳輸無人機(jī)搭載的傳感器的數(shù)據(jù)。
4 結(jié)束語
由于現(xiàn)有MavLink協(xié)議的設(shè)計(jì)主要面向低速率、大數(shù)據(jù)量的消息傳輸,存在移動(dòng)通信信道特性差、環(huán)境干擾因素多、頻譜資源少等特點(diǎn),本文通過對基于移動(dòng)通信的微型無人機(jī)技術(shù)進(jìn)行研究,提出一種可以用于微型無人機(jī)自主巡航的新型移動(dòng)通信協(xié)議。相比于主流的MavLink協(xié)議,MUAV-MTP協(xié)議面向于無人機(jī)-服務(wù)器-客戶端的遠(yuǎn)程移動(dòng)網(wǎng)絡(luò)控制模型,無人機(jī)無需搭載微波接收器,從根本上避免了無人機(jī)通過微波被劫持的情況[15]。同時(shí),通過移動(dòng)網(wǎng)絡(luò)通信,無人機(jī)的IP地址是動(dòng)態(tài)分配的,具有一定的不可預(yù)測性[16],有效地避免了針對無人機(jī)的網(wǎng)絡(luò)攻擊,提高了通信安全性。
[1] 謝相博,徐光輝,范凱鑫,等.基于4G的無人機(jī)遠(yuǎn)程巡邏系統(tǒng)[J].通信技術(shù),2015(11):1305-1309.
[2] 歐陽秋萍,李 杰,沈林成.考慮3G/4G網(wǎng)絡(luò)特性的多無人機(jī)環(huán)保監(jiān)測任務(wù)調(diào)度[J].計(jì)算機(jī)應(yīng)用,2016,36(3):871-877,882.
[3] 何 一,姜 飛,張亞妮.基于多旋翼無人機(jī)和4G的指控系統(tǒng)中繼通信研究[C]//中國指揮控制大會(huì)論文集.出版地不詳:中國指揮與控制學(xué)會(huì),2015:4.
[4] 程宏寬,柳正揚(yáng),鄭仁杰,等.基于4G網(wǎng)絡(luò)平臺(tái)控制四旋翼飛行器的系統(tǒng)設(shè)計(jì)[J].信息化建設(shè),2015(8):120-121.
[5] ABDELHAMID A,PENG Z,ABDELHAMID B.Advanced software ground station and UAV development for NLoS control using mobile communications[J].Discrete Dynamics in Nature and Society,2015,2015:1-20.
[6] BEARD R W,KINGSTON D,QUIGLEY M,et al.Autonomous vehicle technologies for small fixed-wing UAVs[J].Journal of Aerospace Computing Information & Communication,2005,2(1):92-108.
[7] CORDOBA G M A.Autonomous intelligent fuzzy logic guidance,and flight control system for the EFIGENIA EJ-1B MOZART unmanned aerial vehicle UAV [J].IFAC Proceedings Volumes,2007,40(7):31-36.
[8] 林 鷹.無人機(jī)進(jìn)軍空中快遞業(yè)[J].交通與運(yùn)輸,2014(1):41-42.
[9] 王振華,黃宵寧,梁 焜,等.基于四旋翼無人機(jī)的輸電線路巡檢系統(tǒng)研究[J].中國電力,2012,45(10):59-62.
[10] 姬江濤,扈菲菲,賀智濤,等.四旋翼無人機(jī)在農(nóng)田信息獲取中的應(yīng)用[J].農(nóng)機(jī)化研究,2013,35(2):1-4.
[11] 呂 強(qiáng),倪佩佩,王國勝,等.DSP的MAVLink微型無人機(jī)通信協(xié)議移植與應(yīng)用[J].單片機(jī)與嵌入式系統(tǒng)應(yīng)用,2014(11):3-5,8.
[12] 張 華.移動(dòng)通信技術(shù)未來的發(fā)展趨勢[J].中國新通信,2014(15):42-43.
[13] 趙 飛,葉 震.UDP協(xié)議與TCP協(xié)議的對比分析與可靠性改進(jìn)[J].計(jì)算機(jī)技術(shù)與發(fā)展,2006,16(9):219-221.
[14] 龍昱程.基于TCP協(xié)議的應(yīng)用層協(xié)議設(shè)計(jì)[J].信息通信,2015(5):69-70.
[15] 佚 名.2017年哪些網(wǎng)絡(luò)安全威脅不容忽視[J].網(wǎng)絡(luò)安全技術(shù)與應(yīng)用,2016(12):172.
[16] 畢倩倩,王斌君,王靖亞.動(dòng)態(tài)分配的可信IP地址研究[J].中國人民公安大學(xué)學(xué)報(bào)(自然科學(xué)版),2010(4):40-43.
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會(huì)展(2014年4期)2014-11-27 07:46:46
大眾創(chuàng)業(yè)(2009年10期)2009-10-08 04:52:00
數(shù)字社區(qū)&智能家居(2009年7期)2009-09-29 08:16:48
數(shù)字社區(qū)&智能家居(2009年11期)2009-06-25 04:30:34
數(shù)字社區(qū)&智能家居(2009年3期)2009-04-21 03:09:04
數(shù)字社區(qū)&智能家居(2009年2期)2009-03-27 04:33:44
數(shù)字社區(qū)&智能家居(2009年12期)2009-02-03 07:50:48
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32