智能型光學玻璃切割機機械機構設計與實驗研究*
2018-06-03 23:46:52魏加爭
機電工程技術 2018年5期
魏加爭
(中山職業技術學院,廣東中山 528400)
0 引言
光學玻璃在數碼相機、數碼攝像機、智能手機等新興光電信息產品中有著廣泛的應用。成品光學元件由企業根據市場技術要求,將分割成條狀的毛坯光學玻璃再切割成0.1~40 g的塊狀玻璃,通過壓鑄模工藝將塊狀玻璃壓鑄成所需的形狀。由于這些器件尺寸較小,加之光學玻璃本身價格昂貴,對其切割技術要求很高。目前國內大多數廠家對光學玻璃的分塊切割主要是依靠人工操作,造成廢品率高、安全性低、效率低等問題,這些問題直接制約企業的快速發展。因此,光學玻璃塊狀自動切割裝備研制顯得尤為重要。
本研究提出了一種智能型光學玻璃切割機的機構設計方案,結構簡單,制造費用低,生產率高。
1 總體方案設計
1.1 機械結構設計原則
根據光學玻璃脆斷條件和切割技術要求,確保設備各功能機構與光學玻璃加工工藝,協調、高效、穩定工作。設計設備應遵循以下設計原則:
①高度自動化,操作簡單,工作效率高;
②設備制造、安裝及維護成本低;
③機構運動無干涉,故障率低;
④產品加工精度高,加工工藝性好。
1.2 機械機構總體設計
本項目設計目標:將人工堆放在物料板上的條狀光學玻璃,自動完成取料、切割工作。由此將整個機械結構系統分為取料機構、送料機構和切割機構三大部分,為順利實現以上功能,又將取料機構細分為舉升機構、抓取機構、姿態調整機構和側壓機構。設備的整體機械機構結構如圖1所示。
1.3 機械機構工作原理
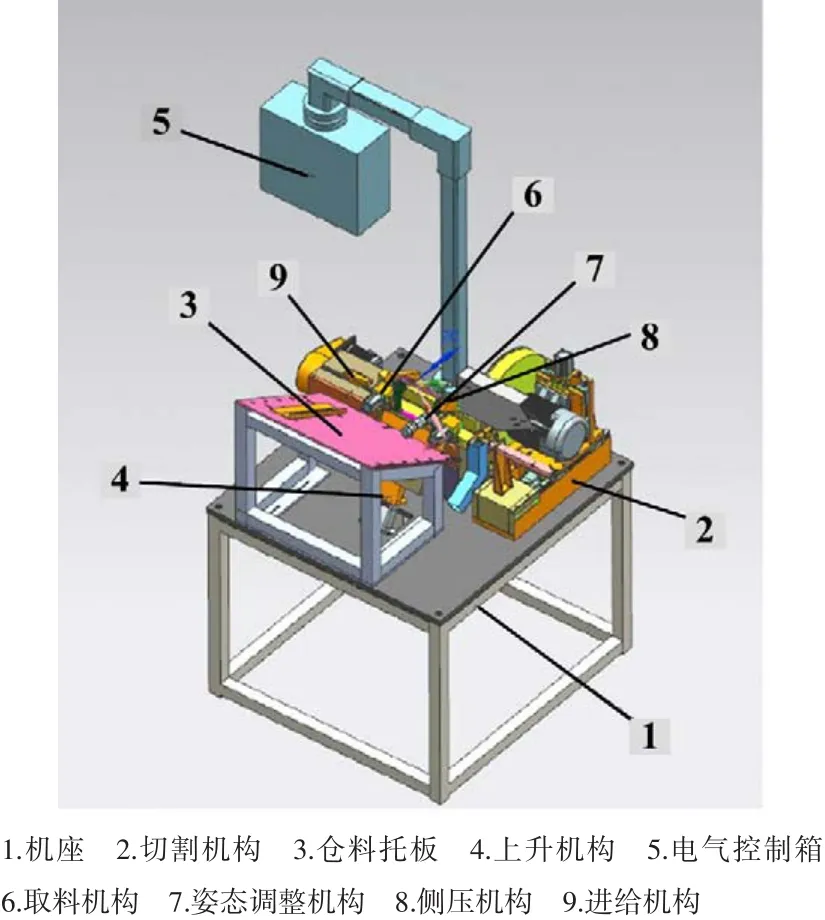
圖1 光學玻璃切割機結構示意圖
上升機構將倉料托板上的條狀光學玻璃抬起,取料機構對條狀光學玻璃進行夾取,姿態調整機構進行條狀玻璃翻轉,調整成水平狀態,然后側壓機構將條狀玻璃放置到送料導向基座上,在控制系統精確控制下由送料機構完成精準進料,最后由切割機構完成條狀玻璃切割。
2 設備主要機械機構設計
2.1 上升機械機構設計
將擺放在倉料托板上的條狀玻璃順序抓取進行切割,首先將碼放在傾斜物料托板上整齊的玻璃條分離。上升機構執行元件為氣缸,氣缸桿外伸上升塊將條狀玻璃抬起,取料機構夾住,氣缸回退,傾斜倉料托板上的光學玻璃條在重力的作用下依次下滑到上升塊的上方位置,等待下一次循環上料。上升機構示意圖如圖2所示。
2.2 取料機械機構設計
取料機構的作用是把上升機構抬起的玻璃條抓住,當被舉升的玻璃條位于抓取基座與抓取爪之間,抓取氣缸在控制系統的控制下伸出運動,帶動抓取座向固定的抓取爪方向移動,抓取座與抓取爪距離變小,進而將玻璃條抓取;抓取座與基座之間用燕尾槽結構配合聯接,氣缸桿與燕尾滑塊螺紋聯結,保證了運動順暢平穩,燕尾槽結構保證了抓取座與抓取爪之間的角度保持90°,抓取座與抓取爪表面黏敷一層橡膠,確保玻璃條棱邊不會被氣缸沖擊損壞。取料機構示意圖如圖3所示。

圖2 上升機構示意圖
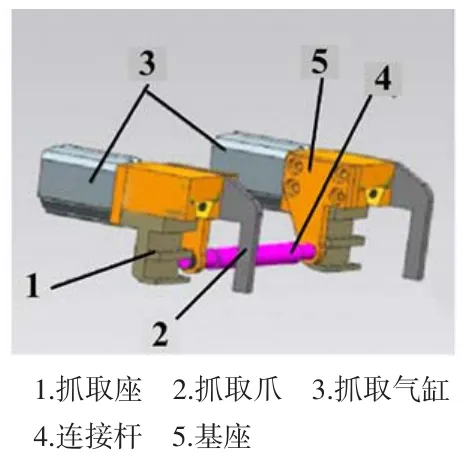
圖3 取料機構示意圖
2.3 姿態調整機構設計
在上升機構中為了實現玻璃條在自重力作用下移動到上升塊上方位置進行自動上料功能,設計倉料托板與玻璃條放置導軌呈40°夾角,因此玻璃條被取料機構抓取后不再是水平姿態而是傾斜的;所以需將條狀玻璃進行角度翻轉成水平姿態,再將玻璃條放到玻璃條送料軌道上。姿態調整機構示意圖如圖4所示。
姿態調整機構的動力元件是翻轉氣缸,翻轉氣缸通過氣缸基座與鉸鏈連接板固定,兩個鉸鏈連接板與連接板基座固定,翻轉臂與連接桿通過頂緊螺釘鎖止相對轉動,連接桿兩端通過鍵聯接與抓取機構相連,保證姿態調整機構隨著連接桿轉動。取料機構將玻璃條夾取,翻轉氣缸在控制系統的作用下,翻轉氣缸外伸,實現翻轉臂繞著連接桿轉動,連接桿帶動抓取機構轉動,調整玻璃條成水平姿態。
2.4 側壓機構設計
側壓機構組成:成平行狀態的兩個側壓導軌座與送料導向基座固定,側壓導軌安裝在側壓導軌座上,姿態調整機構鉸鏈連接板通過滑塊與側壓導軌滑動連接,側壓氣缸與側壓導軌座固定,側壓氣缸桿與姿態調整機構鉸鏈連接板固定連接。側壓機構的功能是:將姿態調整機構調整至水平的玻璃條,從一側壓向送料導向座方向,將條狀玻璃穩定在送料導向座上,為玻璃條精準送料做好準備。側壓機構的結構如圖5所示。

圖4 姿態調整機構示意圖
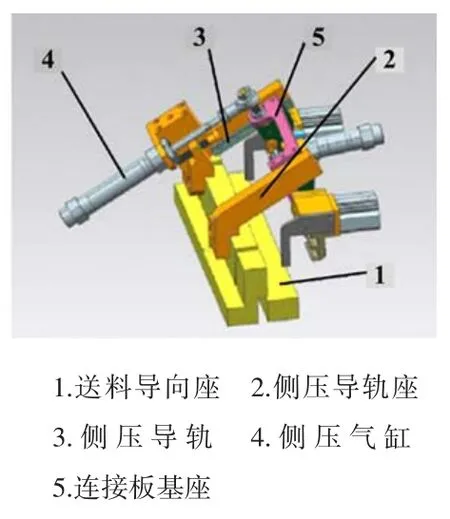
圖5 側壓機構示意圖
2.5 進給機械機構設計
進給機構是光學玻璃切割機的核心機構。進給機構的設計精度高低直接影響著光學玻璃切割體積的精度大小,所以進給機構的進給距離要精準,實現精準控制。因此,送料機構的驅動選用伺服電機,通過同步帶與減速器連接,減速器與絲杠連接,在控制系統的控制下進行精準傳動。
送料機構的主要組成包括:絲杠基座、送料導向座、送料塊、絲杠、滑動線軌、伺服電機、減速器等。進給機構的示意圖如圖6所示。
2.6 切割機構設計
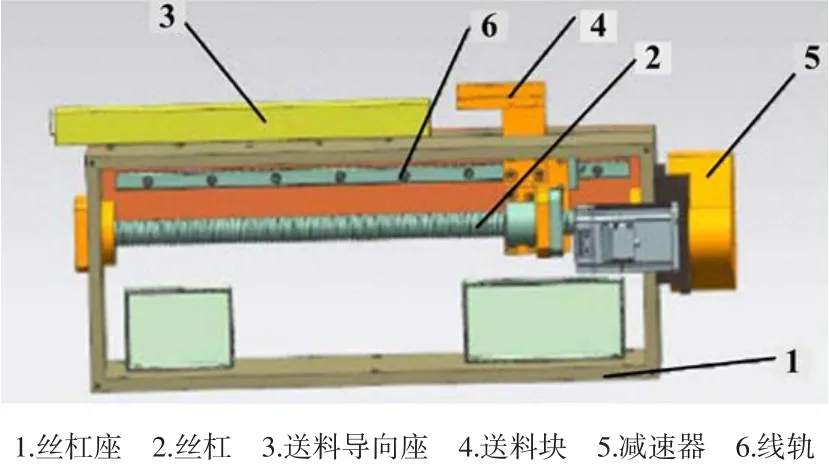
圖6 進給機構示意圖
切割機構是光學玻璃切割機的核心機構。光學玻璃條由送料機構送到送料導向座上,由視覺機器人控制系統自動計重進行切割,切割機構在伺服電機的控制下進行切割進給,切割過程中,傳感器和刀具同時接觸到光學玻璃,當光學玻璃切斷時,傳感器在壓縮彈簧力的作用下復位,同時向控制系統發送停止、及反轉信號,伺服電機停止進給并反轉帶動滑動基板回退至初始位置,準備進行下一次光學玻璃送料。為了保證光學玻璃斷面的平整度,在設備結構裝配時應精準控制刀具的徑向方向與進刀方向的平行度,及進刀方向與玻璃條的垂直度。
切割機構是由切割電機、刀盤、十字滑臺及進給電機組成。切割的進給運動進刀和退刀是通過一個立式滑動基板連接到立式底座上,立式滑動基板的動力元件是一個伺服電機,通過滾珠絲杠驅動實現刀盤電機上下運動。立式底座與水平滑動基板固定連接,水平滑動基板通過線軌與底座連接,伺服電機通過減速器與滾珠絲杠連接驅動平滑動基板左右運動。最終帶動切割刀盤能夠實現上下、水平方向上往復移動切割。切割機構的示意圖如圖7所示。
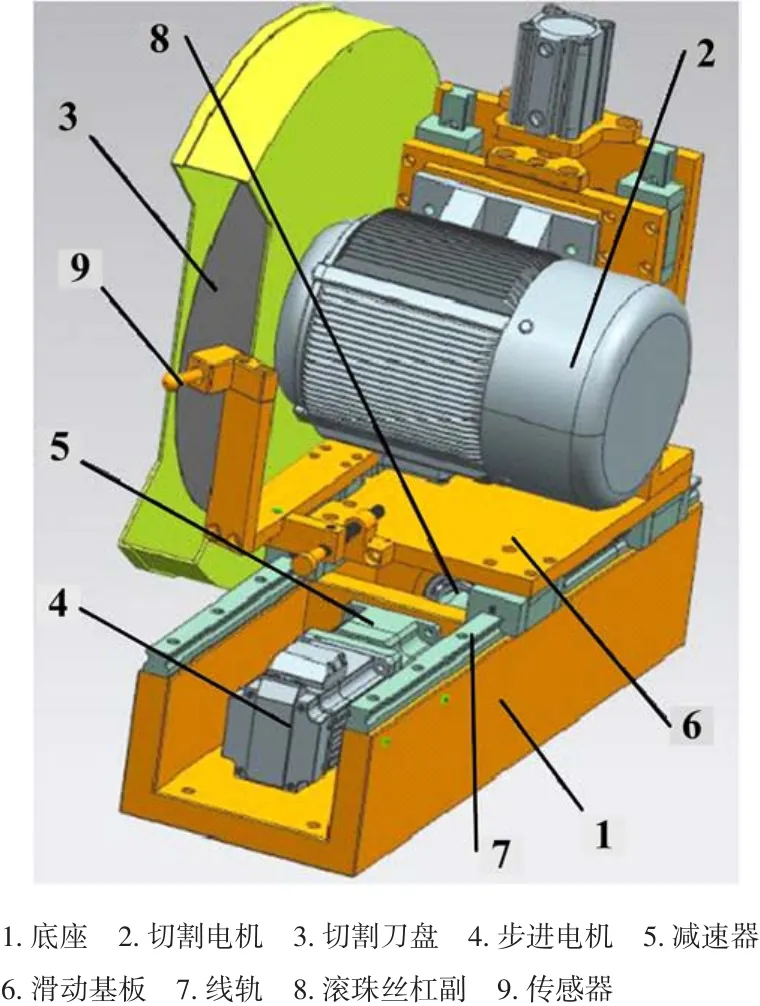
圖7 切割機構示意圖
3 樣機效果試驗驗證
運用UG軟件對機械結構建模設計完成后,進行數字裝配及運動仿真,并繪制零件圖、裝配圖。制定設備制造生產流程及各個零件加工工藝,完成零件制造、裝配工作。經過對設備的調試,驗證了整個機構的舉升、抓取、姿態調整、側壓、送料、切割等一系列運動動作,實現了機構運動順暢、無干涉,符合設計要求。樣機如圖8所示。
圖8 樣機
4 結論
本文在條形光學玻璃實際切割加工的過程分析基礎上,針對當前切割方式,即人工憑經驗對光學玻璃計重并切割存在的誤差較大、效率較低且安全性較差等一系列問題,提出了一種新型光學玻璃切割機的機構設計,并對其進行了實驗驗證及應用。實驗結果及工廠實際使用表明,該設備具有高精度、高效率以及高安全性等特性,該光學玻璃切割機設備能夠實現條狀光學玻璃的自動切割。
[1]王耀祥.光學玻璃的發展及其應用[J].應用光學,2005(05):61-66.
[2]呂沫,張飛特,王建花.TP玻璃切割工藝研究[J].電子工藝技術,2014(04):242-245.
[3]錢海,沈劍云,徐西鵬.不同結合劑金剛石鋸片精密鋸切石英玻璃研究[J].現代制造工程,2015(8):15-18.
[4]張磊.玻璃切割軌跡最優規劃方法及其控制實時性研究[D].武漢:武漢理工大學,2014.
[5]孫建.玻璃切割控制系統設計與控制方法研究[D].武漢:武漢理工大學,2008.
[6]殷蘇民,張雷洪.激光熱應力切割玻璃實驗與分析[J].中國工程科學,2007(9):67-70.
[7]陳科.五維調整平臺控制系統設計[D].重慶:重慶大學,2015.
[8]舒兵.光學玻璃板狀坯料熱加工連軋機結構設計與研究[D].重慶:重慶大學,2012.
猜你喜歡
《學習方法報》歷史中考版(2023年21期)2023-11-09 07:40:38
數學小靈通(1-2年級)(2020年9期)2020-10-27 03:24:18
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
當代貴州(2019年41期)2019-12-13 09:28:56
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中國共青團(2015年7期)2015-12-17 01:24:38
中學生數理化·八年級物理人教版(2014年2期)2014-04-02 08:50:44