一種伺服驅動定位末端抖振問題的抑制分析及解決辦法
2018-06-03 23:46:56韋鳳
機電工程技術 2018年5期
韋 鳳
(廣州市機電技師學院,廣東廣州 510435)
1 問題提出
在永磁交流伺服傳動系統中,在定位時存在振動問題(比如在機器手臂運動停止時容易發生晃動),稱之為位置末端抖振,通常這種振動在機械結構確定后,表現為振動頻率點固有。在抑制該固有頻率振動時,又要盡量減小對其他運動頻率成分的影響。因此,工程上會選用陷波濾波器進行抖振抑制。本文就采用一種對位置末端抖動抑制的濾波器進行選型分析,在實驗中與低通濾波器進行對比。
2 濾波器的選型
工程上容易實現且效果明顯的陷波濾波器,通常選用二階的。最為典型的是雙T型陷波濾波器,傳遞函數如公式(1)所示。

在實際應用中,為了達到更好的調試效果,需要對公式(1)進行改進,在雙T型陷波濾波器中增加濾波器的陷波深度的可調參數c,這樣可以同時調整陷波濾波器的工作頻率、陷波寬度和陷波深度,如公式(2)所示:

在改進型濾波器傳遞函數中,定義三個重要的參數:
陷波作用頻率ω0:產生陷波作用的固有頻率值;
陷波帶寬系數k1:在陷波作用下,影響系統幅值增益低于-3 dB的頻率帶寬;
陷波深度系數k2:影響濾波器的陷波深度。
為形象改進型雙T型陷波濾波器幅頻特性曲線,可見圖1。濾波器的陷波作用在頻率ω0點處最為明顯,使得幅值增益降至最低。再將濾波器的陷波帶寬記為Bw,陷波深度記為Dp。陷波帶寬Bw、陷波深度Dp與系數k1、k2的關系如公式(3)所示:

參考濾波器設置相關文獻可知,增大系數k1以加寬陷波帶寬,或者降低系數k2以加深陷波深度,均會導致陷波作用頻率ω0附近的相角滯后。因此,在設計濾波器時,只能考慮陷波帶寬、陷波深度和相頻特性之間的相對平衡。在保證濾波帶寬、深度能夠抑制末端低頻抖振的情況下,盡可能減小濾波帶寬、深度取值,從而減少相角滯后。

圖1 改進型雙T網絡陷波濾波器幅頻特性
3 陷波濾波器離散化
上述濾波器選型給出了連續系統中的陷波濾波器傳遞函數,并且分析了濾波器的參數影響。而要將其進行數字化應用,需通過離散化的方法將連續系統中的濾波器轉化為離散系統中的數字濾波器。考慮到后向差分法等效離散化的結構簡單、容易實現,構成系統穩定性強,最終選用該法對公式(2)進行等效離散化處理。
將s=代入式(2),可得:
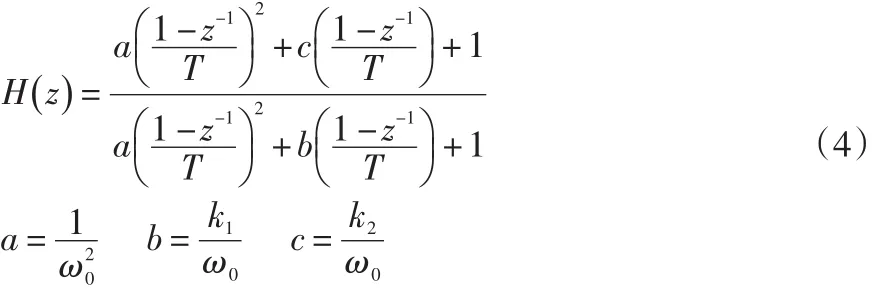
化簡,得到陷波濾波器的離散傳遞函數H(z):

將公式(5)所示離散傳遞函數,換算成關于X(z),Y(z)的差分方程,進而可得到數字濾波器,如公式(6)所示。

4 定位末端抖振抑制分析
伺服系統中位置環控制采用比例+前饋控制方法,若控制參數選用不合適,當運行條件發生變化時(例如負載轉動慣量發生變化、運行指令有高速啟停要求等),加上位置環調節存在滯后因素,會導致系統控制性能變差,伺服系統在定位時會發生超調甚至抖振現象。對伺服系統而言,要抑制定位時末端的抖動,應將減震濾波器加在位置指令之后,濾除位置指令中的抖振頻率成分,進而達到消減振動的目的。定位末端抖動抑制框架如圖2所示。
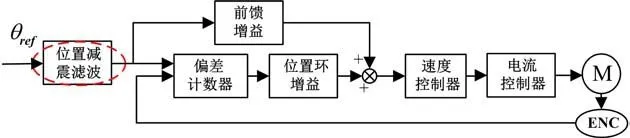
圖2 定位末端抖動被動濾波抑制框圖
位置減震濾波分為低通濾波和陷波濾波,其傳遞函數分別為公式(7)和式(8)。
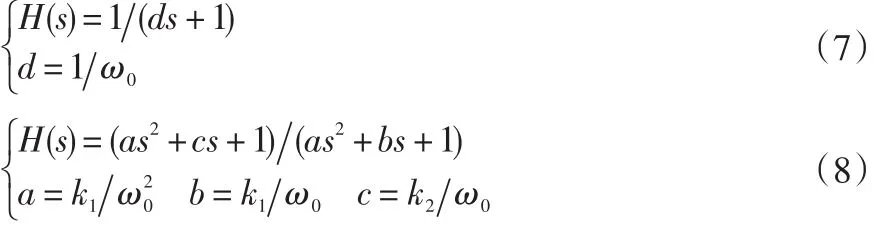
低通濾波器用新極點引入的過阻尼效果校正系統的極點引起的欠阻尼震蕩,綜合之后得到較好的系統性能。低通濾波將濾波頻率前的幅頻特性拉低,消除了抖振點,但對之前的頻段均有影響,且相對于未加濾波的情況相頻特性存在較大的滯后。
陷波濾波器通過引入兩個共軛零點和共軛極點來改善系統的幅頻特性。陷波濾波器的共軛零點的取值要求與濾波前系統中引起抖振的共軛極點盡可能一致,從而達到零極點相消的目的。同時由陷波濾波器的共軛極點則成為了新系統的主導極點,經根軌跡分析,其阻尼比接近1,可認為濾波后系統接近無阻尼狀態。由此可見陷波濾波器僅對濾波頻率點出的幅頻特性產生抑制作用,這一點性能優于低通濾波器。
5 實驗驗證末端抖振
本實驗目的為驗證定位末端抖振抑制在不同工況下的適用性,并將采用陷波濾波器和改進低通濾波器兩種處理方式對比,尋找最適合實際應用的方案。
采用不同慣量盤進行定位末端抖振抑制測試,采用的儀器是GS驅動器與電機,LabVIEW采集卡,實驗平臺如圖3所示。

圖3 測試平臺
通過實驗,觀察轉速為450 r/min左右的抖振抑制情況,測試改變慣量對系統的影響,小慣量采用2個慣量盤,大慣量采用4個慣量盤,通過改變Kp值,得到轉速和位置隨時間的變化曲線,測試條件及結果如表1所示。
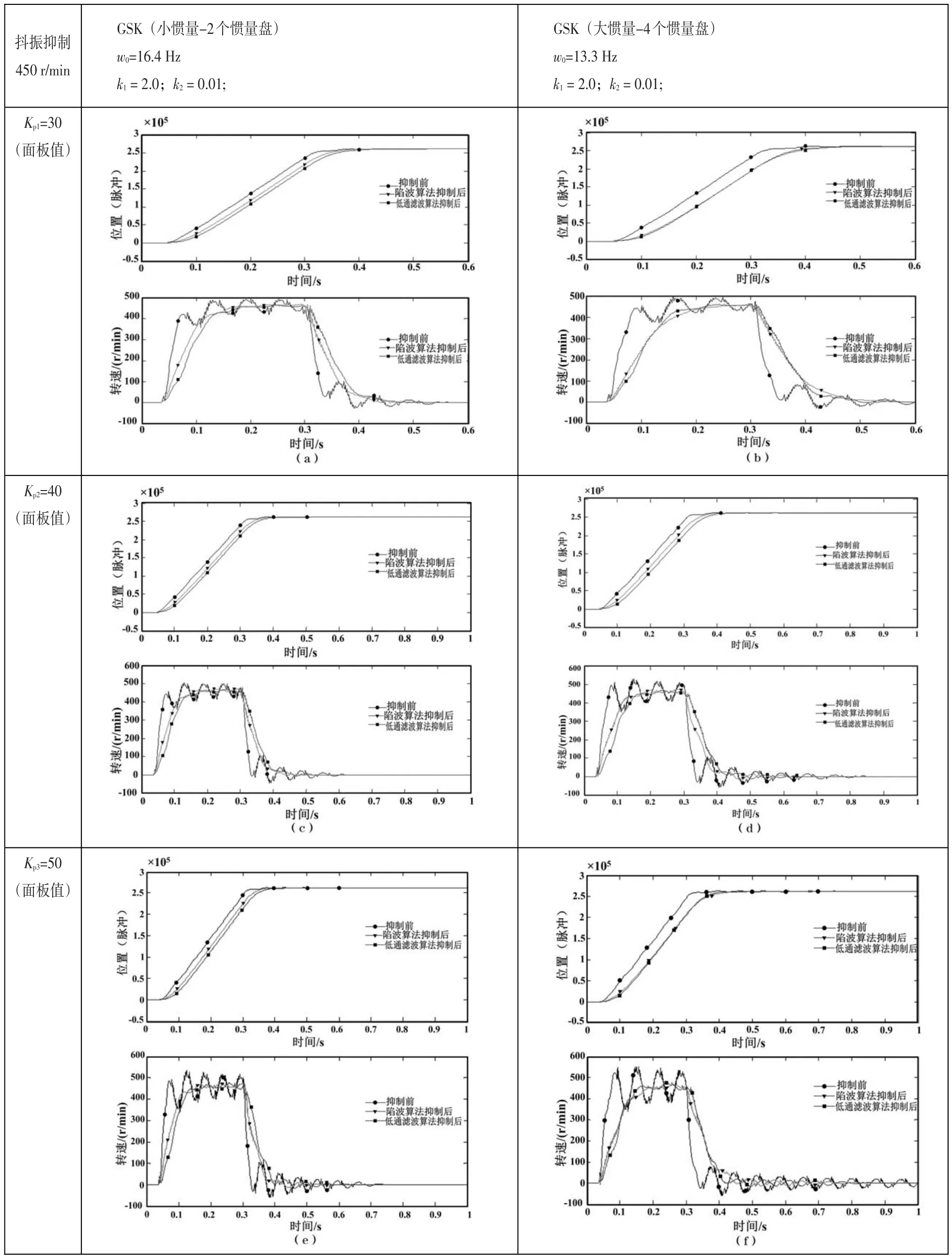
表1 末端抖振抑制測試條件及結果
6 結論
(1)由上表可知,為了測試改變慣量對系統的影響,分別測試了2個慣量盤和4個慣量盤下的各組實驗。通過測試可知,慣量的改變影響系統的抖振頻率,陷波濾波器所用算法能較好地抑制定位末端抖振情況。
(2)保證了負載定位時穩定性。但由于濾波器滯后的相角特性,會為系統引入滯后的相角誤差,降低了伺服系統的快速跟隨性能。對比說明,陷波濾波器的位置響應滯后情況優于低通濾波器,但是仍然有較大的相角誤差,需要進一步的消除。
7 位置相角滯后的補償方法
為了補償相角滯后的問題,采用一種對位置指令系統重構的方法,其結構圖如圖4所示,引入補償系數。
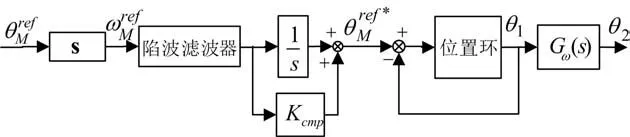
圖4 加濾波的位置環系統模型框圖
采用GS驅動器與電機(130SJT-100DA41)完成本次補償對比試驗。實際振動頻率ω0約為7 Hz,此時可以得到此時補償系數為Kcmp實際調試為0.02。圖5為補償方案的抑制效果,其中圖(a)為位置響應,圖(b)為速度響應。可以看出加入補償環節后,不僅抑制了伺服系統定位末端抖動,而且相位滯后比單純用陷波濾波器引起的相位滯后小。
實驗中兩種陷波濾波方案的響應滯后時間對比,其中陷波濾波器的響應滯后為275 ms,基于陷波濾波器的補償方案的響應滯后時間為175 ms。實際測試與理論分析和仿真結果吻合。
8 總結
在基于辨識得到的伺服系統定位末端抖振頻率,嘗試采用各種被動濾波方式進行定位末端抖動抑制。并詳盡地實驗測試了采用低通濾波器和陷波濾波器的抑制效果,通過對比發現陷波濾波器效果更好,并在陷波濾波的基礎上提出了相角補償方案。
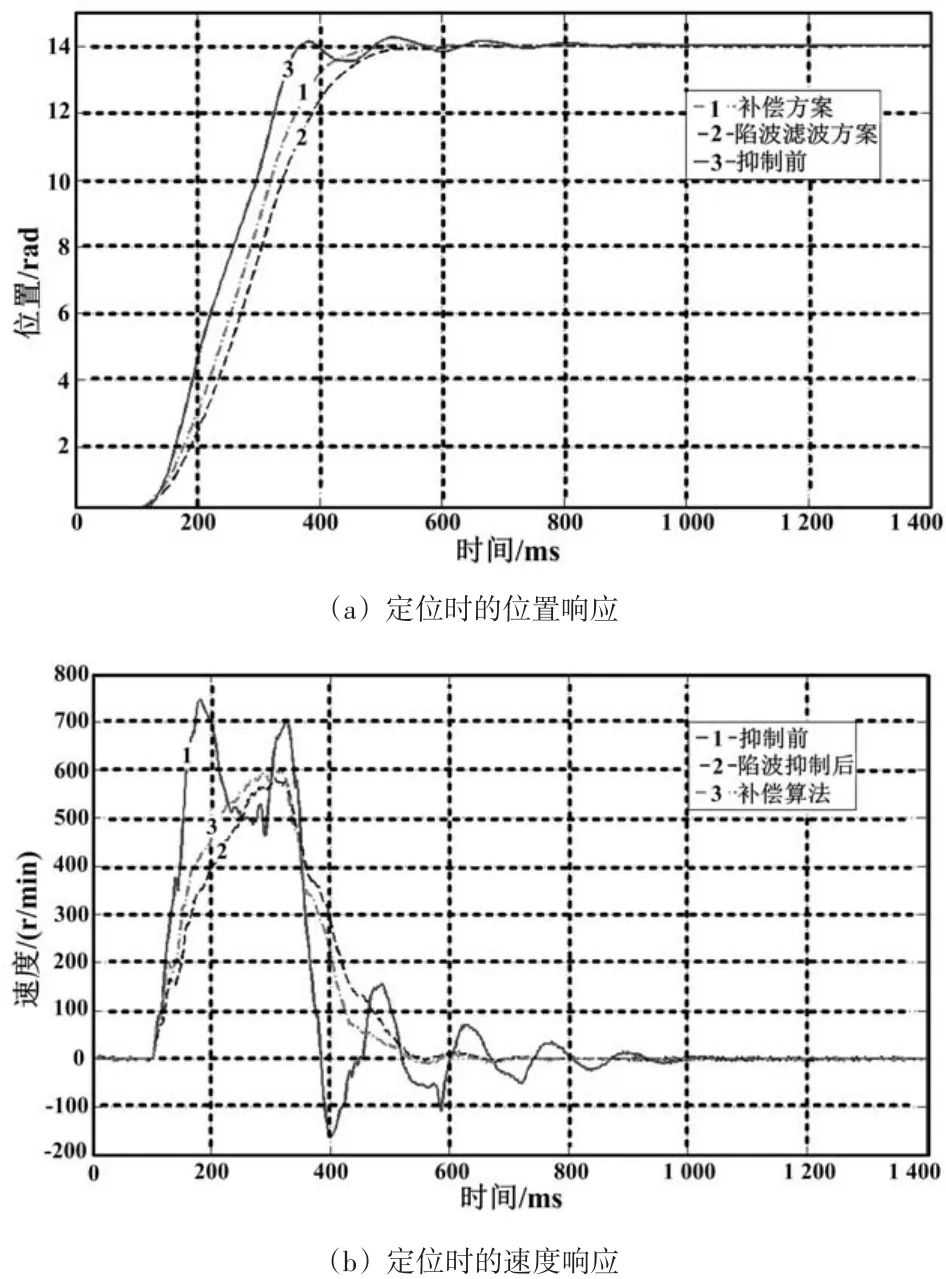
圖5 補償方案的抑制效果
實驗表明:通過位置環參數整定后,基于陷波濾波器的相位補償方案能較好地抑制彈性負載條件下伺服系統定位末端抖動,同時引入的相位滯后比單純用陷波濾波器時要小。該方案適用于對機器手臂、自動化流水線傳輸的末端抖動抑制。
[1]楊輝,范永坤,舒懷亮.抑制機械諧振的一種改進的數字濾波器 [J].光電工程,2004,31(S1):30-39.