基于慣性釋放的某型無人直升機有限元分析
2018-06-03 09:15:24路林華姜年朝王克選張遜
計算機輔助工程 2018年2期
路林華 姜年朝 王克選 張遜

摘要:
基于慣性釋放理論,對某型無人直升機的整機強度和剛度進行仿真。與傳統計算方法相比,慣性釋放法能有效避免邊界條件對結構傳力路徑的影響,更加精確地反映結構的真實應力情況。根據直升機的結構和載荷特點,總結虛約束的施加方法,使結構的變形狀況更加直觀、真實。該方法可以為相似結構直升機的剛度分析提供參考。
關鍵詞:
無人直升機; 慣性釋放; 虛約束; 強度; 剛度
中圖分類號: V2111.47
文獻標志碼: B
Finite element analysis on unmanned helicopter
based on inertia relief
LU Linhua, JIANG Nianzhao, WANG Kexuan, ZHANG Xun
(Nanjing Research Institute of Simulation Technology, Nanjing 210016, China)
Abstract:
The strength and stiffness of a unmanned helicopter is simulated based on inertia relief theory. Compared with the traditional calculation method, the influence of boundary conditions on transmission path of structure can be avoided by inertia relief method. The real stress situation of structure can be reflected more accurately. According to the structure and load characteristics of the helicopter, a method of applying virtual constraint is summarized, which makes the structure deformation more visually and exactly. The method can provide reference for the stiffness analysis of the helicopters with similar structure.
Key words:
unmanned helicopter; inertia relief; virtual constraint; strength; stiffness
收稿日期: 2017-12-25
修回日期: 2018-01-22
作者簡介:
路林華(1989—),男,山東濟寧人,工程師,碩士,研究方向為無人直升機的振動與強度分析,(E-mail)llh1714@126.com
0 引 言
強度和剛度是直升機設計的基本要素,整機強度和剛度是否滿足要求,直接影響直升機的飛行安全。因此,對直升機的強度和剛度進行準確分析是直升機設計過程中十分重要的環節。
在通常情況下,對穩定狀態中的結構進行靜力分析需要足夠的約束,使結構處于靜定或超靜定狀態,即結構不存在剛性位移,否則計算求解會因為矩陣奇異而失敗。在實際情況中,很多在工作狀態下的結構存在剛性位移,甚至處于自由狀態的物體,比如軌道中的衛星、航行中的艦船、飛行中的飛機等。對于這些結構的靜力分析主要有近似約束和慣性釋放2種方法。前者是人為假定一種約束條件,使結構滿足靜力分析的條件,可通過簡單的試驗驗證,應用較廣泛。然而,假定約束并沒有實際的物理意義,約束帶來的反作用力會改變結構真實的傳力路徑,引起應力集中、變形失真等問題,并且假定約束的施加往往依賴工作經驗,不滿足結果唯一性的要求。慣性釋放法將結構恒定加速的狀態視為一致穩定狀態,將結構慣性力視為結構的外部載荷,與原有載荷達到一種“平衡”,施加虛約束使結構達到靜力分析的要求。由于外部載荷處于平衡狀態,虛約束不產生結構作用反力,因此不會對結構的傳力路徑造成影響,計算結果可以真實地反映結構的應力和變形。
慣性釋放是有限元分析軟件中的高級應用,在航空航天、船舶、車輛等領域[1]有諸多應用。簡幫強[2]應用慣性釋放法,消除剛性約束形成的剛化效應,實現泵車關鍵部件的拓撲優化設計。陳召濤等[3]在氣動彈性計算中應用慣性釋放法解決飛行器難以約束的問題,提升計算結果的精度。張少雄等[4-5]將慣性釋放法應用于郵輪、潛艇的強度校核,避免近似約束帶來的應力集中問題。相對而言,慣性釋放法在直升機方面的應用還較少。
本文介紹慣性釋放法的原理,詳細推導慣性釋放原理在有限元分析中的實現過程;以某型無人直升機為研究對象,對比分析慣性釋放法和假定約束方法的計算結果;根據直升機的結構和特點,總結使結構的變形狀況更加直觀、真實的虛約束施加方法。
1 慣性釋放法在有限元中的實現
如果將慣性載荷視為一種外部載荷,那么結構在恒定加速度狀態下,其外部載荷不變,慣性載荷也不會發生變化,該狀態可稱為“靜力平衡”狀態。[6-7]
對于n個節點的有限元模型,結構在各方向的合載荷可表示為
FH=Fx
Fy
Fz
Mx
My
Fz=ni=1fx,i
ni=1
fy,i
ni=1fz,i
ni=1mx,i
ni=1my,i
ni=1mz,i
(1)
式中:f和m分別為載荷集中力和力矩;i表示第i個節點;x、y和z均為載荷方向。
以結構重心為目標,外部載荷在重心位置的等效載荷可表示為
FHC=Ft
Mr (2)
式中:Ft為集中力載荷,Mr為集中力矩。Ft與原載荷中的集中力一致。
Ft=Ft,x
F
t,y
Ft,z=ni=1fx,i
ni=1fy,i
ni=1fz,i (3)
集中力矩Mr分為2部分:一部分是原載荷中的力矩;另一部分是原載荷中的集中力相對結構重心產生的力矩。
Mr=Mx
My
Mz=ni=1mx,i+ni=1(-fy,iΔzi+fz,iΔyi)
ni=1my,i+ni=1(-fz,iΔxi+fx,iΔzi)
ni=1mz,i+ni=1(-fx,iΔyi+fy,iΔxi) (4)
式中:Δxi、Δyi、Δzi分別為第i個節點距離結構重心的坐標差值。
若結構整體質量為m、相對重心的結構慣性矩矩陣為I,則結構整體的平動加速度at和轉動加速度ar可表示為
at=at,x
at,y
at,z=Ft,x/m
Ft,y/m
Ft,z/m (5)
ar=ar,x
ar,y
ar,z=I-1Mx
My
Mz (6)
第i個節點上的加速度向量為
ai=at,i
ar,i=at+ri×ar
ar=at,x,i
at,y,i
at,z,i
ar,x
ar,y
ar,z (7)
式中:ri為第i個節點到重心的坐標矢量。第i個節點上的慣性載荷為
fi,f=-Miai (8)
式中:Mi為第i個節點相連單元質量矩陣在該節點上的分配累加。第i個節點上的合載荷為
fi=[fx,i fy,i fz,i mx,i my,i mz,i]T
(9)
則第i個節點新的載荷為
pi=fi+fi,f (10)
根據各節點的新載荷,生成結構新的載荷向量Pnew,在原結構的基礎上施加“虛約束”即可進行靜力分析計算。
2 某型無人直升機強度和剛度分析
以某型無人直升機為研究對象,分別采用近似約束法和慣性釋放法對俯沖-拉起工況下的強度和剛度進行仿真計算,選取整機和主安裝平臺(該型直升機的主承力結構,用來支撐主旋翼系統等)的計算結果進行對比分析。
在俯沖-拉起過程中,直升機受到的外部載荷主要來自于旋翼系統。旋翼系統對旋翼主軸產生1個垂直向上的集中力,1個向后的水平集中力,1個俯仰力矩,使直升機在前進方向上減速并且俯仰上升。
2.1 近似約束法
為保證結構傳力路徑的完整性,近似約束法一般選取遠離外部載荷作用的區域施加假定約束。分別對起落架滑橇4個連接點、起落架滑橇后2個連接點、尾管末端施加假定約束,依次稱為約束方式1、2、3,整機和主安裝平臺的位移計算結果見圖1。
a) 約束方式1
b) 約束方式2
c) 約束方式3
圖 1 近似約束法對應的位移云圖
整機和主安裝平臺的最大von Mises應力和應變計算結果見表1。
表 1 近似約束法計算結果
2.2 慣性釋放法
分別選取主軸頂端1個梁單元節點、滑橇1個梁單元節點、尾管末端1個殼單元節點施加虛約束[8],依次稱為虛約束方式1、2、3,整機和主安裝平臺的位移計算結果見圖2。
a) 虛約束方式1
b) 虛約束方式2
c) 虛約束方式3
圖 2 慣性釋放法對應的位移云圖
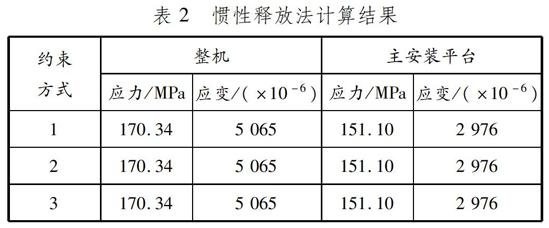
整機和主安裝平臺的最大von Mises應力和應變計算結果見表2。
2.3 對比分析
由前文可以看出:近似約束法的計算結果隨著約束方式的不同而變化較大,并且出現應力集中等問題,說明人為假定的約束改變結構真實的傳力路徑,僅僅是靠近載荷并且遠離
假定約束施加位置區
域內的應力和應變相對穩定,如主安裝平臺;采用慣性釋放法的結構應力和應變不會因虛約束位置不同而發生變化,可真實地反映結構的應力和應變狀態[9-10]。
表 2 慣性釋放法計算結果
3 直升機結構中的虛約束
慣性釋放法中的虛約束要求結構“恰好”滿足靜定條件,過少的約束會使結構矩陣奇異導致無法計算,過多的約束會產生作用反力,影響結構真實的傳力路徑。一般而言,二維模型需要添加2個平動方向、1個轉動方向的虛約束,三維模型需要添加3個平動方向、3個轉動方向的虛約束,且施加虛約束的節點不能存在外部載荷,否則該節點對應的外部載荷失效。虛約束的施加不改變結構的應力和應變結果,任何節點之間的相對位置變化關系不變,但是顯示的位移結果是相對于虛約束施加位置的。
不同的虛約束施加位置對應的位移云圖不同,剛度分析時需要對各點的位移進行二次處理,獲得各節點之間位移的相對關系。為更加直觀地反映結構的變形情況,避免數據的二次處理,根據無人直升機的不同工況可以選擇不同的位置施加虛約束。經過對比驗證,總結出直升機幾種常用工況下的虛約束施加位置。
(1)俯沖-拉起工況。該工況載荷主要由旋翼系統產生,重點分析尾管、機身區域相對旋翼系統的變形,可在旋翼主軸頂端施加虛約束。
(2)回停旋轉和垂直起飛工況。該工況下重點分析機體相對重心位置的變形,可在整機重心位置施加虛約束。
(3)滾轉改出、帶功率偏航、側風載荷工況。該工況重點分析尾管相對機頭區域的側向變形,可在機頭或者尾管末端位置施加虛約束。若考慮側向載荷對機體橫滾方向的影響,則可在滑橇位置施加虛約束。
4 結束語
將慣性釋放法應用于某型無人直升機整機的強度、剛度仿真分析,通過與傳統近似約束法對比,證明該方法可以真實地反映結構的應力和變形狀態,為直升機的結構設計提供重要的數據支撐。根據直升機的結構和工況特點總結3種典型工況下的虛約束施加方法,更加直觀地展示結構的真實變形,避免數據的二次處理,對相似結構直升機的剛度分析有一定的指導作用。
參考文獻:
[1] 沈光烈, 謝義杰. 慣性釋放法在車輛有限元分析中的應用及缺陷[J]. 客車技術與研究, 2016, 38(5): 1-3.
[2] 簡幫強. 基于拓撲優化的泵車關鍵部件輕量化研究[D]. 湘潭: 湘潭大學, 2015.
[3] 陳召濤, 孫秦. 慣性釋放在飛行器靜氣動彈性仿真中的應用[J]. 飛行力學, 2008, 26(5): 71-74.
[4] 張少雄, 楊永謙. 慣性釋放在油船結構強度直接計算中的應用[J]. 船海工程, 2004, 161(4): 4-6.
[5] 張少雄, 曾競龍, 楊永謙. 某潛艇耐壓殼結構強度和屈曲有限元分析[J]. 船海工程, 2004, 161(5): 13-15.
[6] 路林華. 基于SiPESC.OPT的模型修正問題研究[D]. 大連: 大連理工大學, 2013.
[7] 張錦. 葉輪機振動模態分析理論及數值方法[M]. 北京: 國防工業出版社, 2001: 142-337.
[8] 彭禹, 郝志勇. 基于動力學仿真的零件拓撲優化方法研究[J]. 中國機械工程, 2007, 18(8): 975-978.
[9] 康民. 直升機硬式操縱系統剛度設計方法[J]. 直升機技術, 2004(1): 1-5.
[10] 倪德, 朱如鵬, 靳廣虎, 等. 機動飛行時直升機尾傳動軸的橫向振動建模與特性[J]. 振動與沖擊, 2014, 33(7): 215-220.
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中華詩詞(2019年7期)2019-11-25 01:43:04
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現代企業(2015年9期)2015-02-28 18:56:50
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18
