獼猴桃果實(shí)相向運(yùn)動(dòng)采摘模式的研究
2018-06-06 08:01:28谷新運(yùn)崔永杰
農(nóng)機(jī)化研究 2018年5期
關(guān)鍵詞:設(shè)計(jì)
谷新運(yùn),崔永杰
(西北農(nóng)林科技大學(xué) 機(jī)械與電子工程學(xué)院,陜西 楊凌 712100)
0 引言
獼猴桃的采摘模式?jīng)Q定了采摘機(jī)器人末端執(zhí)行器的結(jié)構(gòu)形式和工作原理,同時(shí)也決定了作業(yè)效率,是獼猴桃采摘機(jī)器人的研究內(nèi)容之一。為實(shí)現(xiàn)目標(biāo)果實(shí)快速采摘不能一味地模仿人工采摘模式,更重要的是采用簡單可行的機(jī)構(gòu)高效地實(shí)現(xiàn)采摘作業(yè)。
R. Lewis等在2008年發(fā)現(xiàn)在采摘蘋果時(shí)只要抓持力不超過可承受閾值上限就不會(huì)誘發(fā)擦傷[1]。Jun Li等在2016年發(fā)現(xiàn)影響采摘蘋果效率的主要因素是采摘模式,并研究了4種采摘模式,最后指出兩只手指在上、一只手指在下抓持蘋果,然后彎曲后拉斷為最佳采摘模式[2]。Johan Baeten等在2008年設(shè)計(jì)了一種內(nèi)部裝有相機(jī)的漏斗式柔軟抓持器來采摘蘋果[3]。Kanae Tanigaki等在2008年設(shè)計(jì)了一種采用兩個(gè)手指夾持果柄然后向上拉的采摘模式來采摘櫻桃[4]。張凱良等設(shè)計(jì)了一款采用瓜鉗夾持、切刀剪切果柄和電熱切割器剪切果柄的草莓采摘末端執(zhí)行器[5]。采摘機(jī)器人能否準(zhǔn)確、高效地進(jìn)行采摘作業(yè)和末端執(zhí)行器的工作有直接關(guān)系,末端執(zhí)行器的采摘速度與其結(jié)構(gòu)、工作流程密切相關(guān)[6]。劉繼展等設(shè)計(jì)了一款采用真空吸盤分離、手指夾持、激光器切斷果梗的番茄采摘末端執(zhí)行器[7]。Guohua Wang等在2016年設(shè)計(jì)了一種采用3個(gè)氣囊夾持果實(shí),夾鉗夾持果柄,然后套筒收縮分離番茄的采摘末端執(zhí)行器[8]。Yuanshen Zhao等在2016年設(shè)計(jì)了一種雙臂番茄收貨機(jī)器人,并設(shè)計(jì)了鋸切斷式和氣吸夾持式兩種末端執(zhí)行器[9]。錢少明等設(shè)計(jì)了一款2 個(gè)彎曲關(guān)節(jié)抓持、切割刀片切割的黃瓜采摘末端執(zhí)行器[10]。傅隆生等設(shè)計(jì)了一款從底部接近、旋轉(zhuǎn)包絡(luò)分離毗鄰果實(shí)并手指抓取、旋轉(zhuǎn)分離果實(shí)的獼猴桃采摘末端執(zhí)行器[11]。陳軍等設(shè)計(jì)了一款手指夾持、旋擰分離果實(shí)的獼猴桃采摘末端執(zhí)行器[12]。鮑官軍等設(shè)計(jì)了一款采用FPA 的氣動(dòng)柔性彎曲關(guān)節(jié)夾持果實(shí)的蘋果采摘末端執(zhí)行器[13]。由此可見:目前國內(nèi)外以蘋果、櫻桃、草莓、番茄、黃瓜和獼猴桃果實(shí)為采摘對(duì)象研究開發(fā)了多種末端執(zhí)行器,多數(shù)是夾持果實(shí),切斷或折斷果柄分離果實(shí),然后釋放果實(shí)這樣的采摘模式。夾持到釋放其實(shí)可以簡化為一步采摘,對(duì)于獼猴桃的采摘作業(yè)可以拋棄用手指去夾持獼猴桃的動(dòng)作,直接上行機(jī)構(gòu)下行機(jī)構(gòu)作用于獼猴桃果實(shí),使其繞其形心旋轉(zhuǎn)實(shí)現(xiàn)果實(shí)采摘。
本文對(duì)于獼猴桃的采摘作業(yè)是否可以拋棄手指抓持動(dòng)作,提出了一種相向運(yùn)動(dòng)的采摘模式,并設(shè)計(jì)了采摘模型、運(yùn)行機(jī)構(gòu)及控制系統(tǒng);同時(shí),采用正交試驗(yàn)以采摘力為評(píng)價(jià)指標(biāo)研究了該采摘模式,為獼猴桃果實(shí)采摘機(jī)器人的末端執(zhí)行器設(shè)計(jì)提供了理論依據(jù)。
1 運(yùn)行機(jī)構(gòu)導(dǎo)程測(cè)定與預(yù)試驗(yàn)
1.1 試驗(yàn)裝置
相向運(yùn)動(dòng)果實(shí)果柄分離試驗(yàn)裝置如圖1所示。試驗(yàn)設(shè)備為上海衡翼精密儀器有限公司生產(chǎn)的HY-0230型微控電子萬能試驗(yàn)機(jī)(精度等級(jí)0.5級(jí),分辨力1/250 000,精度±0.5%,速度可在0.001~500mm /min 內(nèi)任意調(diào)節(jié),力傳感器量程為0~100N),試驗(yàn)中根據(jù)需要自制果柄夾具和運(yùn)行機(jī)構(gòu)夾具,運(yùn)行機(jī)構(gòu)包括上行機(jī)構(gòu)和下行機(jī)構(gòu),由步進(jìn)電機(jī)和絲杠螺母滑塊組成,控制系統(tǒng)采用51單片機(jī)。試驗(yàn)裝置工作原理如圖2所示。上行機(jī)構(gòu)和下行機(jī)構(gòu)相向運(yùn)動(dòng)將果實(shí)分離,同時(shí)力傳感器記錄下分離過程的受力情況。
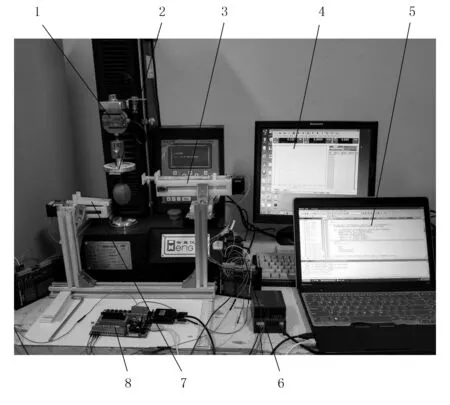
1.力傳感器 2.果柄夾具 3.上行機(jī)構(gòu) 4.上位機(jī) 5.下位機(jī) 6.運(yùn)行機(jī)構(gòu)夾具 7.下行機(jī)構(gòu) 8.單片機(jī)控制系統(tǒng)圖1 相向運(yùn)動(dòng)果實(shí)果柄分離試驗(yàn)裝置圖Fig.1 Device of relative movement separation test between fruit and stem
1.2 試驗(yàn)方法
1.2.1 導(dǎo)程的測(cè)定
導(dǎo)程是指同一螺旋線上相鄰兩牙對(duì)應(yīng)點(diǎn)的軸向距離,用代號(hào)S表示。它與螺距不同,螺距指的是螺紋上相鄰兩牙對(duì)應(yīng)點(diǎn)的軸向距離,代號(hào)是P。因本次試驗(yàn)所采用的絲杠均是單線螺紋,故導(dǎo)程S等于螺距P。導(dǎo)程的測(cè)定流程圖如圖3所示。
1.2.2 獼猴桃主要物理尺寸測(cè)定
利用數(shù)顯電子游標(biāo)卡尺(精度0.01mm)測(cè)量獼猴桃果實(shí)的果柄長度、果實(shí)長度、果實(shí)寬度厚度的最大值。
1.2.3 預(yù)試驗(yàn)及因素水平確定
對(duì)于相向運(yùn)動(dòng)的采摘模式,擬通過正交試驗(yàn)尋找最佳采摘條件。首先通過預(yù)試驗(yàn)確定因素及因素水平,試驗(yàn)指標(biāo)為采摘力,試驗(yàn)因素選擇上行機(jī)構(gòu)作用位置、下行機(jī)構(gòu)作用位置、上行機(jī)構(gòu)行進(jìn)速度和下行機(jī)構(gòu)行進(jìn)速度。上行機(jī)構(gòu)作用位置選取距離果蒂15mm,下行機(jī)構(gòu)作用位置選取距離果鄂15mm,上行機(jī)構(gòu)行進(jìn)速度選取4mm/s,下行機(jī)構(gòu)行進(jìn)速度選取4mm/s進(jìn)行預(yù)試驗(yàn)。

圖2 果實(shí)果柄分離試驗(yàn)裝置工作原理圖Fig.2 Schematic diagram of separation test between fruit and stem

圖3 運(yùn)行機(jī)構(gòu)導(dǎo)程測(cè)定流程圖Fig.3 Determination flow chart of operating mechanism lead
2 果實(shí)果柄分離試驗(yàn)
2.1 材料與設(shè)備
試驗(yàn)材料為帶果柄“海沃德”獼猴桃,質(zhì)量范圍為80~130g,2016年11月30日采摘于西北農(nóng)林科技大學(xué)眉縣獼猴桃試驗(yàn)站,共計(jì)63個(gè)存放于冷藏室中,在2017年1月2日從中隨機(jī)選取27個(gè)果實(shí)進(jìn)行果實(shí)果柄分離試驗(yàn)。
試驗(yàn)設(shè)備為上海衡翼精密儀器有限公司生產(chǎn)的HY-0230型微孔電子萬能試驗(yàn)機(jī)。該儀器支持拉伸試驗(yàn)、剪切試驗(yàn)、彎曲試驗(yàn)、撕裂試驗(yàn)及壓縮試驗(yàn)等,考慮到果實(shí)果柄分離時(shí),目標(biāo)果實(shí)繞其形心旋轉(zhuǎn),果柄離層處受剪切力,果柄通過果蒂與果實(shí)連接,而在成熟期果蒂處會(huì)形成離層,離層的主要組織結(jié)構(gòu)是維管束。維管束是一種特殊的纖維組織細(xì)胞,可以承受較大的拉應(yīng)力,但是承受剪切力容易斷裂。因此,決定用萬能試驗(yàn)機(jī)進(jìn)行剪切試驗(yàn)。
2.2 試驗(yàn)方法
試驗(yàn)采用正交試驗(yàn)法,從采摘的帶果柄獼猴桃果實(shí)中隨機(jī)選取27個(gè)果實(shí)分為3組,選用L9(34)正交表。根據(jù)預(yù)試驗(yàn)選取試驗(yàn)因素及水平如表2所示:A為3個(gè)上行機(jī)構(gòu)作用位置;B為3個(gè)下行機(jī)構(gòu)作用位置;C為3個(gè)上行機(jī)構(gòu)行進(jìn)速度;D為3個(gè)下行機(jī)構(gòu)行進(jìn)速度。相向運(yùn)動(dòng)采摘模式如圖4所示。
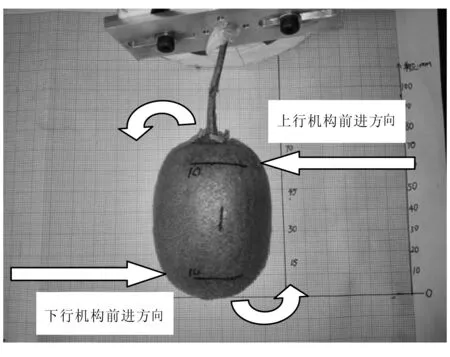
圖4 相向運(yùn)動(dòng)采摘模式圖Fig.4 Picking pattern diagram of relative movement
上行機(jī)構(gòu)和下行機(jī)構(gòu)同時(shí)接觸目標(biāo)果實(shí),然后相向運(yùn)動(dòng),使得獼猴桃繞其形心旋轉(zhuǎn),果蒂處離層受剪切力,很輕易實(shí)現(xiàn)分離。獼猴桃果實(shí)分離原理圖如圖5所示。果柄與枝干和果實(shí)連接處均簡化為鉸鏈,果柄AB長度為L1,果實(shí)長度為L2,L3為上行機(jī)構(gòu)作用位置與果蒂之間距離,L4為下行機(jī)構(gòu)作用位置與果鄂之間距離,虛線為獼猴桃果實(shí)分離時(shí)位置圖,α為果實(shí)旋轉(zhuǎn)角度,β果柄旋轉(zhuǎn)角度,1為上行機(jī)構(gòu)作用位置標(biāo)定線,2為下行機(jī)構(gòu)作用位置標(biāo)定線。
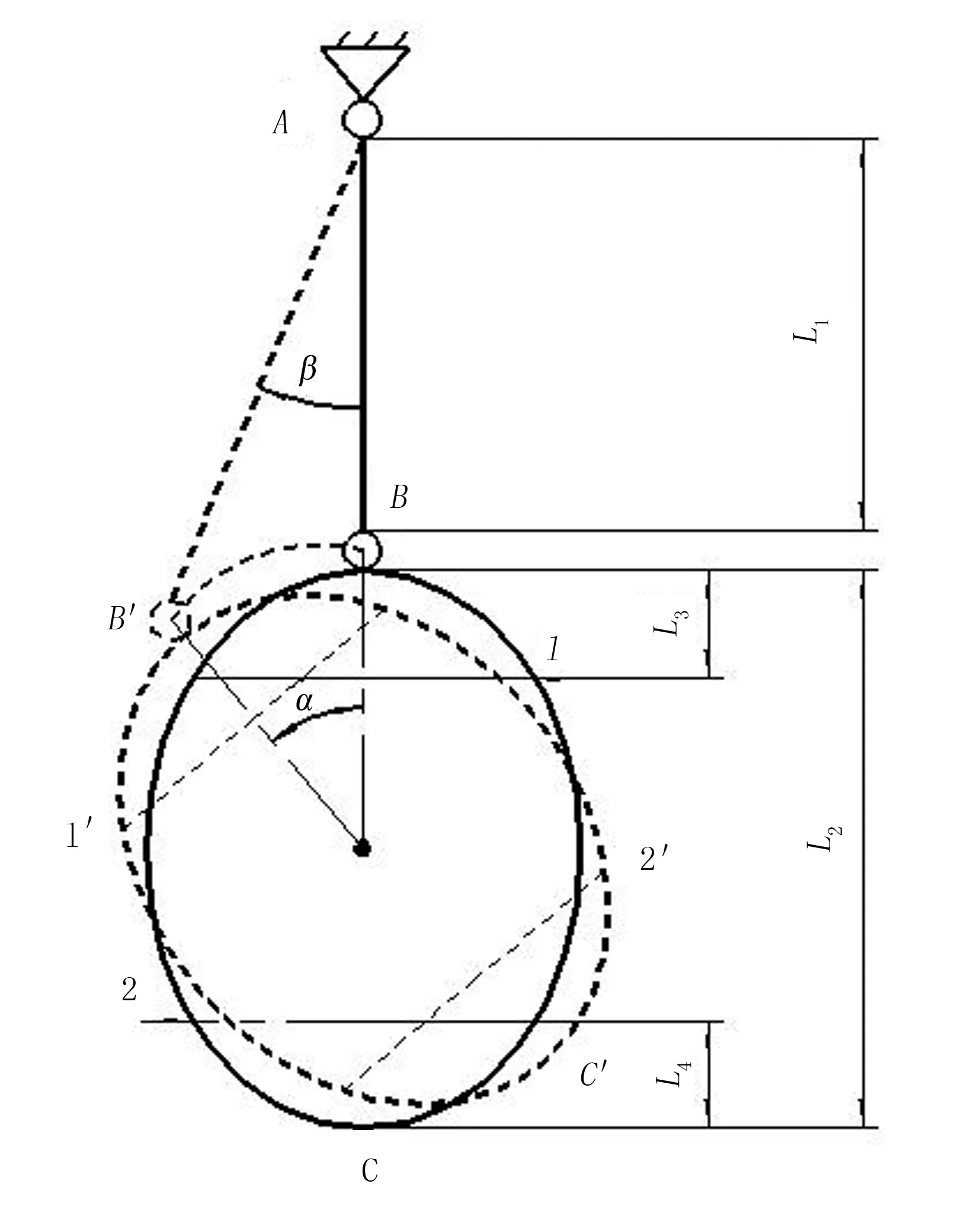
圖5 獼猴桃果實(shí)分離原理圖Fig.5 Schematic diagram of fruit separation
萬能試驗(yàn)機(jī)自動(dòng)記錄相向運(yùn)動(dòng)采摘過程中果蒂處所受剪切力大小,一組試驗(yàn)用9個(gè)獼猴桃,試驗(yàn)重復(fù)3次,取平均值作為試驗(yàn)結(jié)果填入表格中。最后,采用 SPSS19.0 軟件對(duì)試驗(yàn)結(jié)果進(jìn)行方差分析,獲得對(duì)采摘力影響因素的顯著性順序。
3 結(jié)果與分析
3.1 運(yùn)行機(jī)構(gòu)導(dǎo)程測(cè)定與預(yù)試驗(yàn)
3.1.1 導(dǎo)程的測(cè)定
經(jīng)測(cè)量:上行機(jī)構(gòu)轉(zhuǎn)5圈前進(jìn)6mm,由此可以得出上行步進(jìn)電機(jī)絲杠導(dǎo)程為1.2mm;下行機(jī)構(gòu)轉(zhuǎn)5圈前進(jìn)3mm,由此可以得出下行步進(jìn)電機(jī)絲杠導(dǎo)程為0.6mm。
根據(jù)預(yù)試驗(yàn)選取的試驗(yàn)因素水平4mm/s以及導(dǎo)程(1.2mm/s和 0.6mm/s)可以確定上行機(jī)構(gòu)和下行機(jī)構(gòu)各自的脈沖頻率(驅(qū)動(dòng)器細(xì)分均設(shè)置成800pulse/rev),上行機(jī)構(gòu)為2 666pulse/s,下行機(jī)構(gòu)為5 332pulse/s。考慮到上行機(jī)構(gòu)導(dǎo)程是下行機(jī)構(gòu)的兩倍,可以將下行機(jī)構(gòu)驅(qū)動(dòng)器細(xì)分調(diào)成400pulse/rev,如此一來導(dǎo)程雖不一樣,可以通過調(diào)細(xì)分來實(shí)現(xiàn)同步運(yùn)動(dòng),上行機(jī)構(gòu)和下行機(jī)構(gòu)均為2 666pulse/s。
3.1.2 獼猴桃主要物理尺寸測(cè)定
獼猴桃測(cè)定的主要物理尺寸如表1所示。
3.1.3 預(yù)試驗(yàn)及因素水平確定
隨機(jī)選取一獼猴桃,用數(shù)顯游標(biāo)卡尺測(cè)量:果柄長度38.62mm,果實(shí)長度69.46mm,果實(shí)寬度52.54mm,果實(shí)厚度44.43mm。
上行機(jī)構(gòu)和下行機(jī)構(gòu)相向運(yùn)動(dòng),用時(shí)5.8 s成功將果實(shí)與果柄分離。試驗(yàn)發(fā)現(xiàn)機(jī)構(gòu)運(yùn)行平穩(wěn),速度可以加快,故選取2、4、6mm/s3個(gè)水平,上行機(jī)構(gòu)和下行機(jī)構(gòu)的驅(qū)動(dòng)器對(duì)應(yīng)的脈沖頻率依次為1 333、2 666、3 999pulse/s。試驗(yàn)因素及水平如表2所示。

表2 正交試驗(yàn)試驗(yàn)因素及水平
上行機(jī)構(gòu)作用位置A為標(biāo)定線與果蒂之間距離,下行機(jī)構(gòu)作用位置B為標(biāo)定線與果鄂之間距離。
3.2 果實(shí)果柄分離試驗(yàn)
3.2.1 相向運(yùn)動(dòng)采摘過程分析
果實(shí)果柄分離試驗(yàn)過程如圖6所示。圖6 (a)為給獼猴桃做標(biāo)定線;圖6 (b)安裝獼猴桃果實(shí),啟動(dòng)試驗(yàn)裝置;圖6 (c)果實(shí)在上行機(jī)構(gòu)和下行機(jī)構(gòu)作用下,空中繞其形心旋轉(zhuǎn),果實(shí)果柄實(shí)現(xiàn)分離;圖6 (d)用角尺測(cè)量果實(shí)旋轉(zhuǎn)角度。由表3計(jì)算得果實(shí)旋轉(zhuǎn)角度平均值為35.78°,試驗(yàn)結(jié)果與傅隆生在2015年通過果實(shí)采摘簡化幾何模型得出果柄與果實(shí)慣性軸的最大夾角β介于47°~60°,果實(shí)旋轉(zhuǎn)角度約為33°~46°一致[11];圖6 (e)是采摘效果圖;圖6 (f)是一組的采摘效果圖。
3.2.2 試驗(yàn)因素對(duì)采摘力的影響
對(duì)果實(shí)果柄分離試驗(yàn)數(shù)據(jù)進(jìn)行極差分析,果實(shí)果柄分離試驗(yàn)數(shù)據(jù)如表3所示,試驗(yàn)因素與指標(biāo)趨勢(shì)圖如圖7所示。

(a)做標(biāo)定線 (b)開始相向運(yùn)動(dòng)

(c)果實(shí)果柄分離 (d)旋轉(zhuǎn)角度測(cè)量
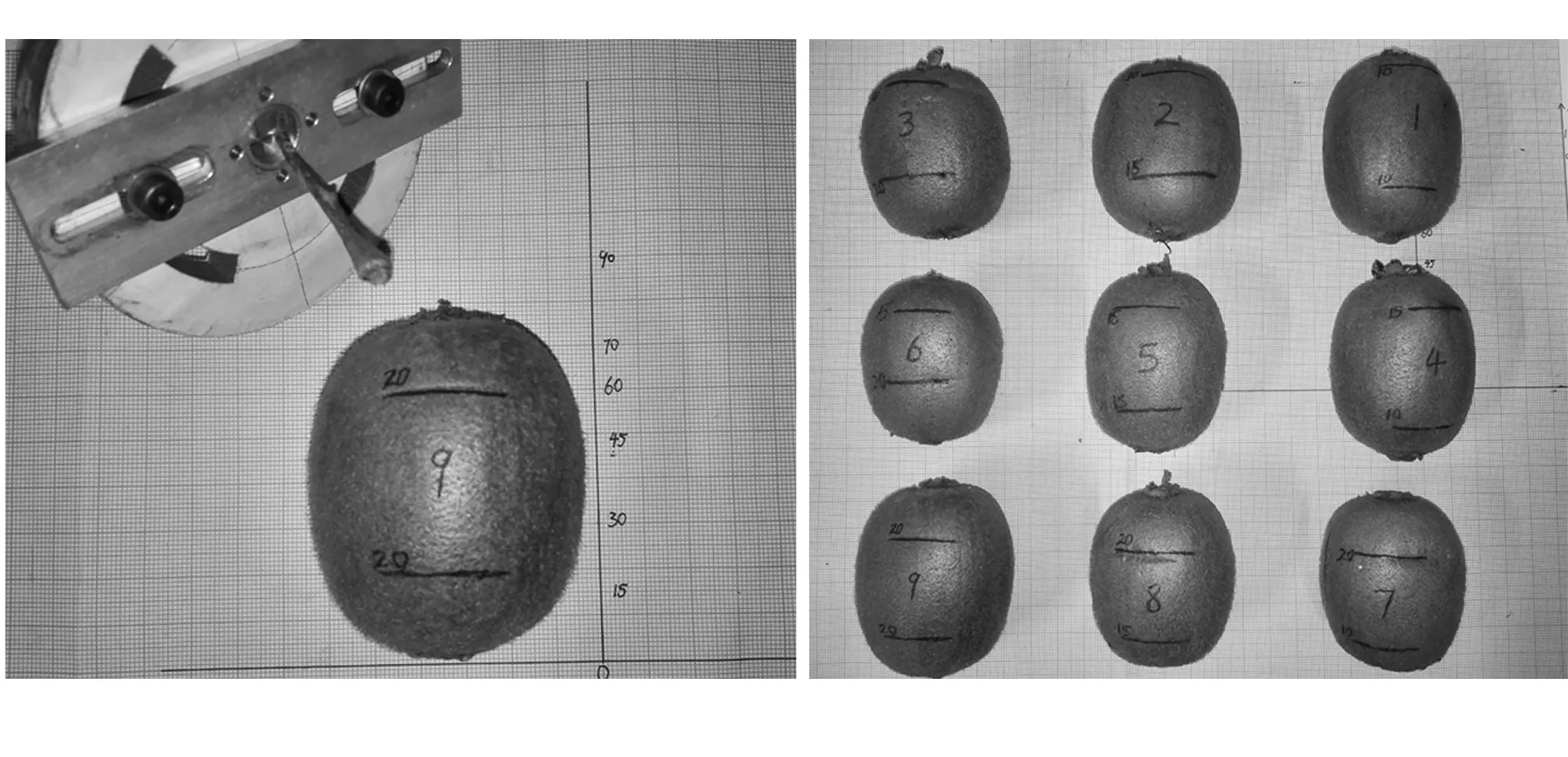
(e)采摘效果圖 (e)一組采摘效果圖6 果實(shí)果柄分離試驗(yàn)過程圖Fig.6 Process diagram of separation test between fruit and stem表3 果實(shí)果柄分離試驗(yàn)數(shù)據(jù)Table 3 Date of separation test between fruit and stem
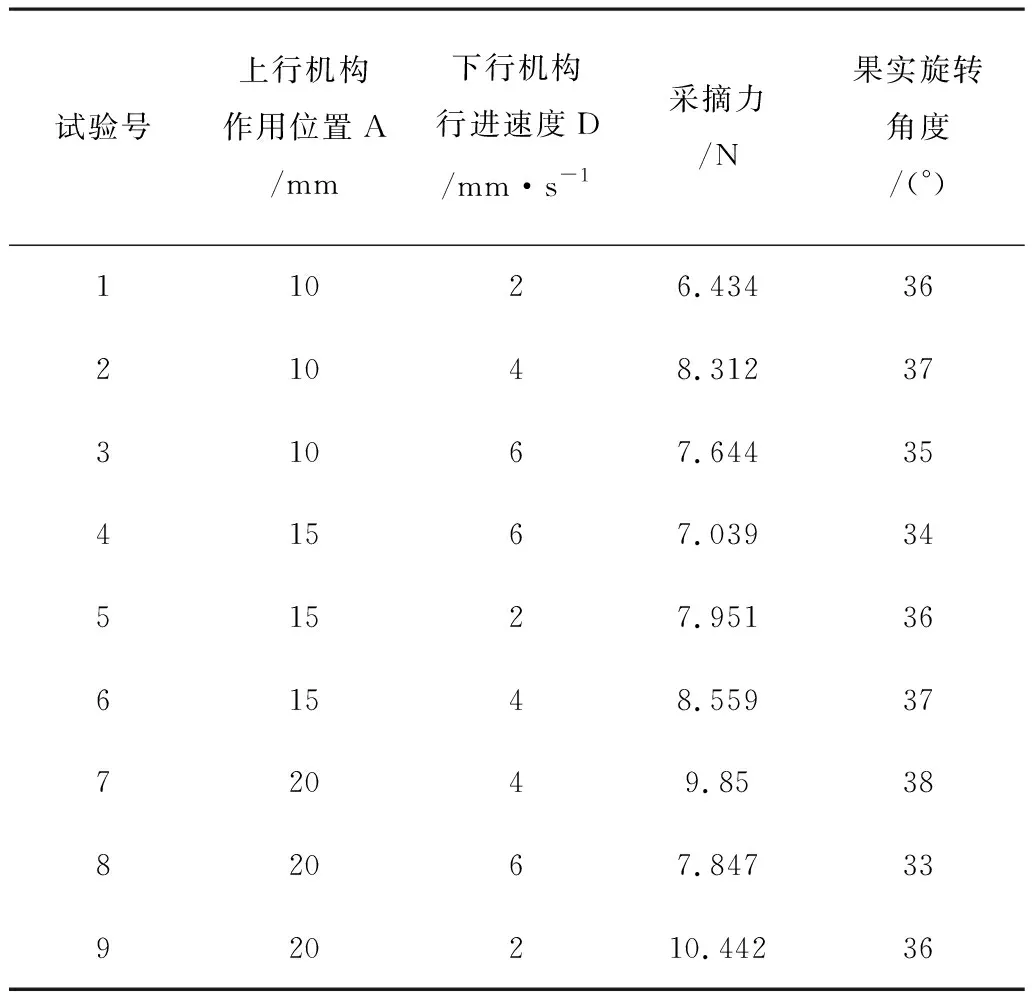
試驗(yàn)號(hào)上行機(jī)構(gòu)作用位置A/mm下行機(jī)構(gòu)行進(jìn)速度D/mm·s-1采摘力/N果實(shí)旋轉(zhuǎn)角度/(°)11026.4343621048.3123731067.6443541567.0393451527.9513661548.5593772049.853882067.84733920210.44236
上行機(jī)構(gòu)作用位置A為標(biāo)定線與果蒂之間距離。
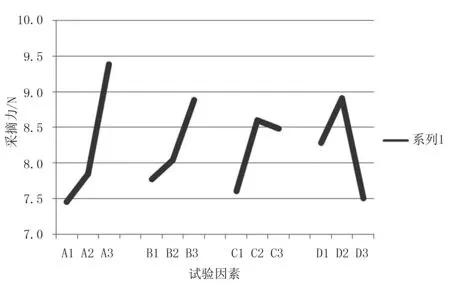
圖7 試驗(yàn)因素與指標(biāo)趨勢(shì)圖Fig.7 Test factor and Indicator trend graph
因素A極差最大,因素對(duì)試驗(yàn)指標(biāo)影響的主次順序是A、D、B、C,即上行機(jī)構(gòu)作用位置影響最大。最優(yōu)組合是A1 D3 B1 C1,也就是上行機(jī)構(gòu)作用位置距離果蒂10mm,下行機(jī)構(gòu)前進(jìn)速度6mm/s,下行機(jī)構(gòu)作用位置距離果鄂10mm,上行機(jī)構(gòu)前進(jìn)速度2mm/s。本次試驗(yàn)采摘力平均值在8.23N,采摘時(shí)間平均值5.3s,采摘時(shí)間要遠(yuǎn)遠(yuǎn)小于傅隆生在2015年采摘試驗(yàn)中單果平均耗時(shí) 22s[11]。經(jīng)過分析可得出:相向運(yùn)動(dòng)采摘模型的上行機(jī)構(gòu)主要起到支點(diǎn)的作用,而下行機(jī)構(gòu)前進(jìn)速度決定了采摘的效率。另外,本研究相向運(yùn)動(dòng)采摘模型的運(yùn)行機(jī)構(gòu)可以延長,后期實(shí)現(xiàn)多果一次性采摘。
4 結(jié)論
1)提出了一種面向獼猴桃果實(shí)的相向運(yùn)動(dòng)采摘模式,經(jīng)試驗(yàn)驗(yàn)證該采摘模式具有可行性,研究為采摘末端執(zhí)行器的設(shè)計(jì)提供了基礎(chǔ)和依據(jù)。
2)相向運(yùn)動(dòng)采摘模式將手指夾持果實(shí)動(dòng)作和旋轉(zhuǎn)采摘?jiǎng)幼鲀?yōu)化為上行機(jī)構(gòu)和下行機(jī)構(gòu)相向運(yùn)動(dòng),省去了夾持果實(shí)和后期釋放果實(shí)的時(shí)間,明顯提高采摘效率,采摘成功率為96.3%,單果采摘時(shí)間均值為5.3s,果實(shí)旋轉(zhuǎn)角度平均值為35.78°。
3)上行機(jī)構(gòu)作用位置、下行機(jī)構(gòu)作用位置、上行機(jī)構(gòu)行進(jìn)速度和下行機(jī)構(gòu)行進(jìn)速度是本次試驗(yàn)的試驗(yàn)因素,主次因素排在前兩位的是上行機(jī)構(gòu)作用位置和下行機(jī)構(gòu)行進(jìn)速度。因此,末端執(zhí)行器設(shè)計(jì)首先考慮這兩個(gè)因素,保證上行機(jī)構(gòu)作用點(diǎn)穩(wěn)定,下行機(jī)構(gòu)采摘?jiǎng)幼骺焖伲瑢?shí)現(xiàn)快速采摘。
4)該采摘模式改變了傳統(tǒng)農(nóng)業(yè)機(jī)器人的采摘方法,上行和下行機(jī)構(gòu)可以延伸為橫板,如此可以實(shí)現(xiàn)多個(gè)果實(shí)一次性采摘, 為今后實(shí)現(xiàn)獼猴桃批量化采摘
作業(yè)、 促進(jìn)獼猴桃采摘機(jī)器人產(chǎn)業(yè)化提供基礎(chǔ)和依據(jù)。
上行機(jī)構(gòu)和下行機(jī)構(gòu)對(duì)于不同獼猴桃的前進(jìn)補(bǔ)給量,實(shí)現(xiàn)多果一次性采摘,需要進(jìn)一步研究;另外,上行機(jī)構(gòu)和下行機(jī)構(gòu)的前進(jìn)作用位置和果實(shí)旋轉(zhuǎn)角度的關(guān)系也需要進(jìn)一步研究。
參考文獻(xiàn):
[1] R Lewis, A Yoxall, M B Marshall, et al.Characterising pressure and bruising in apple fruit [J].Wear ,2008, 264:37-46.
[2] Jun Li , Manoj Karkee, Qin Zhang, et al.Characterizing apple picking patterns for robotic harvesting [J].Computers and Electronics in Agriculture,2016, 127:633-640.
[3] Johan Baeten,Kevin Donn e,Sven Boedrij,et al.Autonomous Fruit Picking Machine:A Robotic Apple Harvester [J].Field and Service Robotics,2008,42:531-539.
[4] Kanae Tanigaki,Tateshi Fujiura, Akira Akase,et al.Cherry-harvesting robot [J].Computers and Electronics in Agriculture, 2008,63:65-72.
[5] 張凱良,楊麗,張鐵中.草莓收獲機(jī)器人采摘執(zhí)行機(jī)構(gòu)設(shè)計(jì)與試驗(yàn)[J].農(nóng)業(yè)機(jī)械學(xué)報(bào),2011,42(9):155-161.
[6] 李國利,姬長英,翟力欣.果蔬采摘機(jī)器人末端執(zhí)行器研究進(jìn)展與分析[J].中國農(nóng)機(jī)化學(xué)報(bào),2014,35(5):231-240.
[7] 劉繼展,李萍萍,李智國.番茄采摘機(jī)器人末端執(zhí)行器的硬件設(shè)計(jì)[J].農(nóng)業(yè)機(jī)械學(xué)報(bào),2008,39(3):109-112.
[8] Guohua Wang,Yabo Yu,Qingchun Feng.Design of End-effector for Tomato Robotic Harvesting [J].International Federation of Automatic Control, 2016,49(16):190-193.
[9] Yuanshen Zhao,Liang Gong,Chengliang Liu,et al.Dual-arm Robot Design and Testing for Harvesting Tomato in Greenhouse [J].International Federation of Automatic Control,2016,49(16):161-165.
[10] 錢少明,楊慶華,王志恒,等.黃瓜抓持特性與末端采摘執(zhí)行器研究[J].農(nóng)業(yè)工程學(xué)報(bào),2010,26(7):107-112.
[11] 傅隆生,張發(fā)年,槐島芳德,等.獼猴桃采摘機(jī)器人末端執(zhí)行器設(shè)計(jì)與試驗(yàn)[J].農(nóng)業(yè)機(jī)械學(xué)報(bào),2015,43(3):1-8.
[12] 陳軍,王虎,蔣浩然,等.獼猴桃采摘機(jī)器人末端執(zhí)行器設(shè)計(jì)[J].農(nóng)業(yè)機(jī)械學(xué)報(bào),2012,43(10):151-154.
[13] 鮑官軍,張水波,陳亮,等.基于氣動(dòng)柔性驅(qū)動(dòng)器的球果采摘末端抓持器[J].農(nóng)業(yè)機(jī)械學(xué)報(bào),2013,44(5):242-246.
AbstractID:1003-188X(2018)05-0215-EA
猜你喜歡
河北畫報(bào)(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
