蔬菜穴盤投放式擺盤裝置的設計與仿真
2018-06-06 03:55:51謝曉東張秀花
農機化研究 2018年6期
關鍵詞:設計
謝曉東,張秀花
(河北農業大學 機電工程學院, 河北 保定 071001)
0 引言
PVC軟穴盤是我國農民用于鋪放在苗床或平坦的地面上進行播種育秧的一種標準化缽體苗育秧盤,穴盤育苗是在多孔穴盤中以草炭、蛙石、珍珠巖等混合輕型物料為育苗基質進行精量播種,是一項快速培育優質壯苗的新型蔬菜育苗技術[1-3]。我國自20世紀80年代引入了穴盤育苗技術,目前該技術已經成為了我國培育蔬菜的主要方式之一[4]。據統計,2015年國內的蔬菜產量達到了7.8萬t,約有60%的蔬菜是采用穴盤育苗方式種植的[5]。穴盤在經過播種、覆土等環節后會被轉運到大棚內進行育秧,其搬運擺放環節多以人工參與為主,擺放所需成本較高,勞動強度大[6-7]。由于成本關系,我國所用穴盤以軟盤為主[8],且秧盤擺放是大棚育秧生產環節中重要的一項,擺盤工作的好壞甚至影響幼苗后期的生長[9]。
在苗床自動化搬運方面,荷蘭VISSER集團公司利用輸送軌道、驅動機構和檢測系統可對苗床堆疊后進行輸送,盤垛下線后配合使用電動車和人力液壓搬運車對穴盤進行搬運,實現了穴盤育苗育秧自動一體化生產[10];但是,其整套裝置成本較高,不符合我國國情,在國內也未見引進。東北農業大學的馬靜龍等研制了一種育秧大棚自動擺盤裝置,其以多關節機械手為主要擺放機構,整個裝置動作靈活,擺放范圍較大[11],但未見樣機的研制及實際應用。綜上所述,國內的穴盤搬運擺放工作仍然以人工為主,對于機械化擺盤的研究還較為欠缺。鑒于此,需要研制一種高效的、針對于軟盤的擺盤機械,以提高穴盤育苗流水線的機械化程度。本文設計了一種在大棚內工作的擺盤機,提出了投放式擺盤的方案,并利用ADAMS和ANSYS進行動力學和靜力學仿真分析,為擺盤裝置的研制提供了合理的依據。
1 擺盤機的結構及設計原理
整套裝置主要由投盤器、連桿、機架、車體及支撐桿組成,如圖1所示。
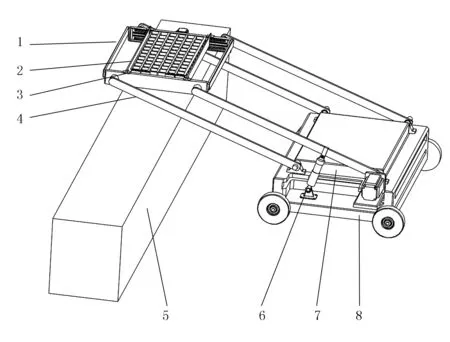
1.投盤器 2.穴盤 3.U形托盤 4.連桿 5.擺放平臺 6.支撐桿 7.機架 8.車體
機架安裝在可移動的車體上,投盤器安裝在連桿上,U型托盤安裝在投盤器內,U型托盤可在投盤器內相互分開或閉合。擺盤前,將已經完成播種覆土后的穴盤放置在投盤器內的U形托盤上,如圖2(a)所示。當投放器接近擺放平臺時,托有穴盤的U形托盤自穴盤底部分開,穴盤底部的間隙逐漸變大,當間隙足夠大時,穴盤在自身重力作用下利用自身形變的特性從分開的間隙彎曲著地,完成擺放過程,如圖2(b)所示。隨后,投盤器升離擺放平臺(如圖1所示),重新將待擺放的穴盤放置在投盤器內,并開始下一次擺盤工序。
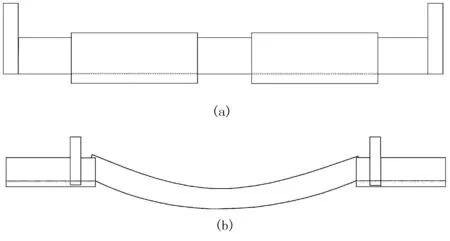
圖2 穴盤投放過程
由于在人工擺放穴盤時人的兩只手也是在緩慢抽離穴盤底部的過程中完成擺盤動作的,因此在此投放過程中U形托盤慢慢抽離穴盤底部的過程類似于人手擺放穴盤的過程。
平行四邊形機構維護簡單,使用壽命較長,各個桿件間可通過相互配合來實現某一桿件的始終水平[12]。本設計中,連桿、機架和投盤器共同組成了平行四邊形機構。工作時,通過連桿的轉動,整個平行四邊形機構可以實現整體形狀的變化。例如,對于連桿間的張開或者并攏的動作,當連桿張開時,投盤器遠離地面進行取盤等操作;當連桿并攏時,投盤器接近地面進行擺盤操作。另外,在此過程中,由于平行四邊形機構的特性,投盤器始終處于水平狀態。
2 關鍵部件的設計
投盤器相當于工業機器人中的末端執行機構。目前,在需要擺放機械的各個領域中,常見的末端執行機構主要包括夾持式執行機構、真空吸附式執行機構及磁吸式執行機構[13-14]。由于要擺放的穴盤為塑料軟盤,在夾持時容易變形,故夾持式機構并不適用;軟質穴盤在擺放時其中充滿了基質土,故真空式和磁吸式執行機構也不適用。為了在不損壞穴盤的前提下將其精確地置于地面,提出了投放式的擺盤方案。投盤器尺寸的設計應該以穴盤尺寸為依據,并由此合理選擇擺放方式及驅動方案等。
投盤器主要包括擺盤殼體、U形托盤、齒輪及齒條,如圖3所示。擺盤殼體對稱布置在U形托盤兩端,并通過殼體連接件相連,擋板固定在殼體上;在殼體內有3段滑槽,中間的托盤滑槽與U形托盤相連接,上下的滑槽上安裝有滑軌,滑軌可在滑槽內滑動。電機主軸穿過殼體與齒輪相連,齒輪和上下齒條相嚙合,齒條安裝在滑軌上,齒條的無齒端和U形托盤連接在一起。由于齒條布置在齒輪上下兩側,在齒輪轉動時,上下齒條將沿著相反的方向滑動,利用上下齒條的不同向滑動,可實現U型托盤的分開或者合并。當U形托盤上放有穴盤并進行擺放時,U形托盤和穴盤底部會產生相對滑動,這種滑動在穴盤底部產生的摩擦力會對穴盤的姿態產生影響,故在托盤兩側設計了擋板裝置,通過該擋板和U形托盤共同作用,可令穴盤在水平方向保持姿態的統一,在保證穴盤平穩著地的同時保證了被擺放穴盤的整齊,對大棚內有限空間進行了充分利用。
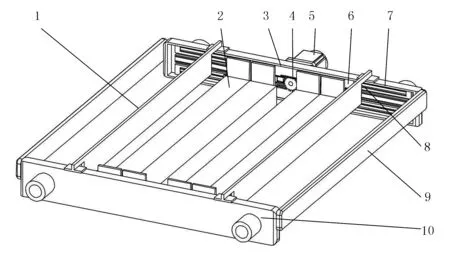
1.擋板 2.U形托盤 3.齒條 4.齒輪 5.電動機 6.滑軌 7.滑槽 8.托盤滑槽 9.殼體連接件 10.擺盤殼體
3 運動仿真與結果
3.1 ADAMS運動學仿真
根據實際情況及穴盤育苗的農藝要求,穴盤擺放機械應滿足以下設計要求:
1)穴盤在靠近擺放平臺的過程中,為了保證穴盤內基質土不受擺盤動作的影響,其運動過程應當盡量平穩。
2)穴盤在被投放過程中的運動狀態應盡量平穩,以避免其從被投放到落地過程中所受振動和擠壓對基質土造成沖擊和松動,令種子暴露在空氣中或產生移位,影響育苗質量。
為了驗證整機在工作時通過平行四邊形機構進行擺盤動作的平穩性,現對整機的運動過程進行仿真。將本機的三維模型導入ADAMS中(見圖4),并按照實際情況設定各個構件的相關參數,如材料類型、摩擦力等;為了便于觀察機構的運動,將部分構件隱藏,得到擺盤機虛擬樣機模型。通過ADAMS運動仿真,可在ADAMS/PostProcessor中生成裝置在擺盤動作中的某一點或者某個部件的速度、加速度、位移等曲線圖,通過觀察圖像可知是否有速度或者加速度的突變,以及整個裝置是否有部件干涉等情況。
圖4 擺盤裝置虛擬樣機
在擺盤執行機構在實際中執行擺盤動作時,設計其運動過程為:平行四邊形連桿的角速度應從0增加到某值后保持不變,隨后從該值緩慢降低到0。為了保證擺盤的平穩,避免運行動作對穴盤出現過大的沖擊,在仿真時引入了ADAMS中的Step函數。為了便于觀察穴盤的運動過程,通過合理設置Step函數,最終確定穴盤的運動形式為:四連桿機構帶動穴盤完成“加速-勻速-減速”運動過程。同時,應用此函數對連桿的角速度進行定義,由此得到的仿真數據可為實際中的機械擺放動作作為參考。
ADAMS有著豐富的運動函數庫,其中的Step函數有設計過程函數和運行過程函數兩種格式及用法。設計過程(design-time)Step函數格式為:Y=Step (A,x0,h0,x1,h1),由數組A的x值生成點(x0,h0)與(x1,h1)之間的階躍曲線,并返回一個Y值數組。運行過程(run-time ) Step函數格式為:Y=Step (x,x0,h0,x1,h1),它通過三次多項式逼近海賽(Heaviside)階躍函數,其定義為

其中,x為自變量;y為函數值;x0為階躍函數起點自變量值;h0為階躍起點處函數值;x1為階躍終點自變量值;h1為階躍終點函數值[15]。
在ADAMS中,將各個構架設置為相應的運動副,在電機所在處設置回轉副后添加驅動。參照實際中的擺放用時,穴盤的移動時間應該設置為1min左右。在此基礎上,為了使速度曲線較為平滑,使之便于觀察,基于step函數在ADAMS函數構建器中創建電機處旋轉副的等效速度函數。
V(t)的表達式為
V(t)=step(time,1,0,20,-3d)+
step(time,21,0,36,0)+step(time,37,0,62,3d)
此Step函數所表達的意義為:
1~20s,連桿由靜止開始,緩慢加速轉動至V(t)=30(°)/s;21~36s,連桿保持勻速轉動;37~62s,連桿緩慢減速直至速度為0。
進行仿真分析后,在產生的結果集中提取關于穴盤的速度、加速度和位移曲線,如圖5所示。
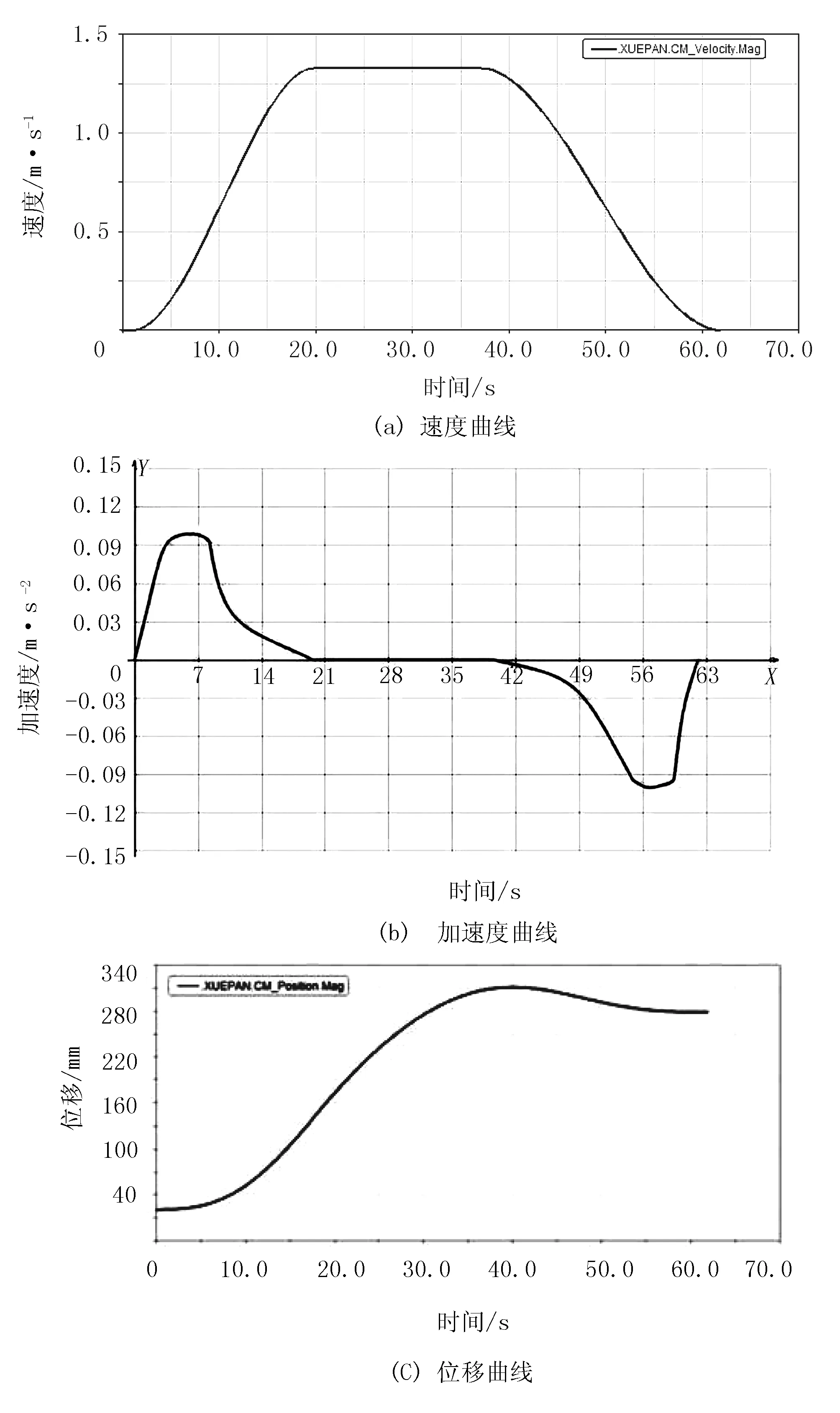
圖5 穴盤運動曲線
其中,位移曲線位移量是以ADAMS內置坐標系為參照。可見,穴盤的運動速度沒有突變現象,且速度曲線和加速度曲線呈對應關系,穴盤的加速度曲線較為平滑,最大加速度為0.1m/s2,且沒有明顯的突變現象,穴盤在運動時所受的沖擊較小;同時,穴盤位移曲線過渡自然,沒有突變產生。由此可知,穴盤的整個運動過程比較平穩,仿真結果符合設計要求。
3.2 穴盤投放狀態的有限元分析
現通過ANSYS軟件對穴盤的投放變形量進行分析。圖6為一種常見的72孔PVC軟穴盤,其尺寸參數540mm(長)×280mm(寬)×40mm(高)。結合穴盤投放方式的設計要求,可知需要注意的參數如下:
1)投盤器底部離地或平臺高度H;
2)穴盤在被投放時的最大形變量L。
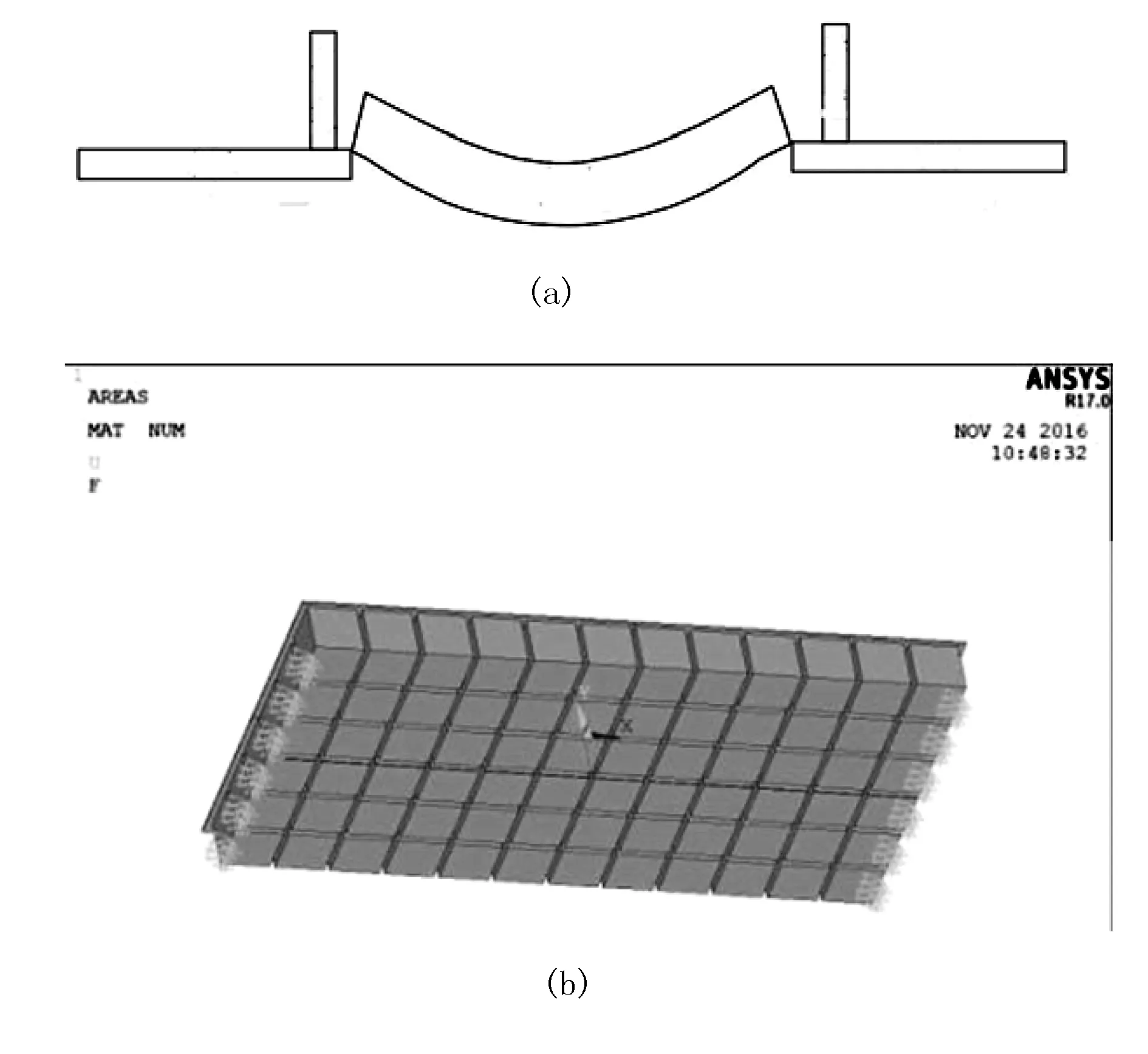
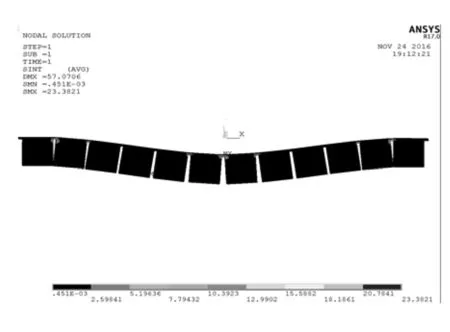
為了避免投盤器在進行投盤作業時觸碰到已經擺放完畢的穴盤,造成穴盤的移動或者損壞,投盤器在投放穴盤時與擺放平臺或地面的高度應該大于或等于穴盤的自身高度,即H≥40mm。為了便于說明,設H=40mm。為了實現穴盤的變形著地,減小穴盤在著地時所受的沖擊,穴盤在被投放時應滿足條件L>H;若L 圖6 穴盤實物圖 穴盤臨近落地時,穴盤部分與U形托盤部分最后接觸的是穴盤最兩側底部的兩條邊,此時穴盤整體的變形量最大。設此時為穴盤落地的臨界狀態,如圖7(a)所示。為了便于仿真,將穴盤模型上的圓角適當簡化;PVC材料的彈性模量通常為2.4~4GPa,泊松比為0.38~0.47。由于穴盤較薄,且為軟質PVC,故設置彈性模量為2.4GPa,設置其泊松比為0.4。隨后,對穴盤進行網格化分,并對穴盤的兩側進行固定約束,如圖7(b)所示,以此模擬穴盤在落地臨界狀態下的狀態。 圖7 穴盤投放臨界狀態示意圖 經查閱有關資料,可知我國常用的基質土密度為900kg/cm3 [16]。經計算,穴盤在裝滿基質土時,質量為m=2.87kg。為了便于仿真,設其總的重力為G=mg≈29.4N,將重力添加到穴盤的中心位置,隨后對穴盤進行仿真分析,得到穴盤受力變形量的分布結果如圖8所示。可見,穴盤最大變形量為L=57mm>H=40mm。 圖8 穴盤形變量分布圖 由此關系式可知:穴盤底部在達到落地臨界條件之前就已經著地。由于穴盤的泊松比介于0.38~0.47之間,而在仿真時預先設定穴盤泊松比為0.4,因此需明確泊松比的改變是否會對仿真結果造成影響。為了驗證仿真結果基于泊松比設置的合理性,增強仿真結果的說服力,依次在ANSYS/Preprocessor中對穴盤的相關參數進行改變。由此發現:當穴盤泊松比在0.38~0.47間變化時,得到的所有仿真結果中穴盤的形變分布云圖幾乎相同,且各仿真結果形變云圖中最大形變量之間的差距在2mm左右。這說明,泊松比的改變并不會對仿真結果造成影響,仿真結果合理。 在此過程中,U形托盤的張開速度決定了穴盤的投放速度,過快的張開速度會令穴盤在被投放到落地過程中受到較大的沖擊,令穴盤內的基質土受到影響;張開速度過慢則會降低擺盤環節的工作效率。參考實際中人工的擺盤速度[17],結合投放器的設計尺寸參數,應將穴盤的投放用時設置在5s左右,即設置U形托盤的張開速度為28mm/s左右。 穴盤的應力分布圖如圖9所示。其最大拉力出現在穴盤中心位置,大約為23N。查閱相關資料[18],參考穴盤的橫截面積,可知PVC材料的穴盤所能承受的最大拉力遠大于23N,故“投放式”擺盤方式不會損傷穴盤,擺盤方案符合設計要求。 圖9 穴盤應力分布圖 1)本文基于平行四邊形機構設計了穴盤的擺放裝置,整個裝置安裝在可移動的車體上,簡化了穴盤的搬運過程,符合大棚育苗的農藝要求。 2)應用ADAMS軟件對裝置進行了動力學仿真分析,得到了穴盤的速度和位移曲線,運動曲線平穩且無突變現象,仿真結果驗證了相關機構的合理性。 3)通過ANSYS軟件對穴盤進行了有限元分析,得到了穴盤的形變分布圖。由仿真結果可知:穴盤最大變形量L=57mm>H=40mm,投放式擺盤方案滿足設計要求,得到的相關數據為今后擺盤機的研制提供了合理依據。 參考文獻: [1] 張兆園,姚爾群,葉偉宗.推進蔬菜工廠化育苗,提升蔬菜產業發展[J].寧波農業技,2014(4):21-23. [2] 韓長杰,楊宛章,張學軍,等.穴盤苗移栽機自動取喂系統的設計與試驗[J].農業工程學報, 2013, 29(8):51-61. [3] 王敏芳,段煉.蔬菜穴盤育苗及管理技術[J].中國園藝文摘,2011, 27(11):138-140. [4] 周穎.育苗新技術與工廠化育苗[J].農業與技術, 2012,32(6):46-46. [5] 國家統計局.中國統計年鑒—2015[M].北京:中國統計出版社,2016. [6] 馬靜龍.育秧大棚自動擺盤裝置的研究[D].哈爾濱:東北農業大學,2014. [7] 郝金魁,張西群,齊新,等.工廠化育苗技術現狀與發展對策[J].江蘇農業科學, 2012,40(1):349-351. [8] 鄭丁科,李志偉.水稻育秧軟塑穴盤播種設備研究[J].農機化研究,2002(4):42-45. [9] 謝連雙.水稻植質缽育秧盤擺放機的試驗與研究[D].大慶:黑龍江八一農墾大學, 2015. [10] Visser International Trade&Engineering B.V.[EB/OL] http://www.visserite.com/index.php?id=5·[2013-03-05] [11] 馬靜龍,馮江,張敏,等.一種關節型擺盤機械手的運動學分析[J].農機化研究, 2014,36(8):14-18. [12] 劉鳳臣,劉黎明,姚赟峰,等.平行四邊形機構在后道包裝機械中的應用[J].包裝與食品機械, 2010,28(5):51-55. [13] 張麒麟.蘋果采摘機器人末端執行器的設計與研究[D].南京:南京農業大學, 2011. [14] 李成偉,朱秀麗,贠超.碼垛機器人機構設計與控制系統研究[J].機電工程,2008,25(12):81-84. [15] 李增剛.ADAMS入門詳解與實例[M].北京:國際工業出版社,2014:88-95. [16] 沈春林,王玉峰.種植屋面及其施工技術[J]. 新型建筑材料,2010,37(1):60-62. [17] 雋杰.幼苗盤自動搬運裝置的移動平臺設計[D]. 楊凌:西北農林科技大學, 2016. [18] 聞邦椿, 張義民, 鄂中凱,等. 機械設計手冊[K].北京:機械工業出版社, 2015:235-241.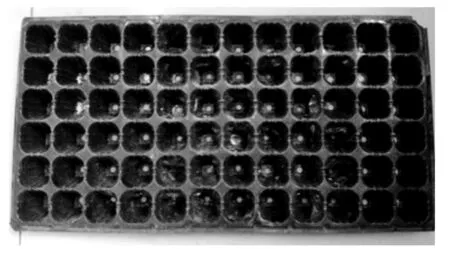

4 結論
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04