基于紅外技術的自動摸高測試儀的設計*
2018-06-14 05:47:12李松郭松
數字技術與應用 2018年3期
李松 郭松
(1.沈陽體育學院運動訓練學院,遼寧沈陽 110102;2.沈陽體育學院計算機教研室,遼寧沈陽 110102)
1 引言
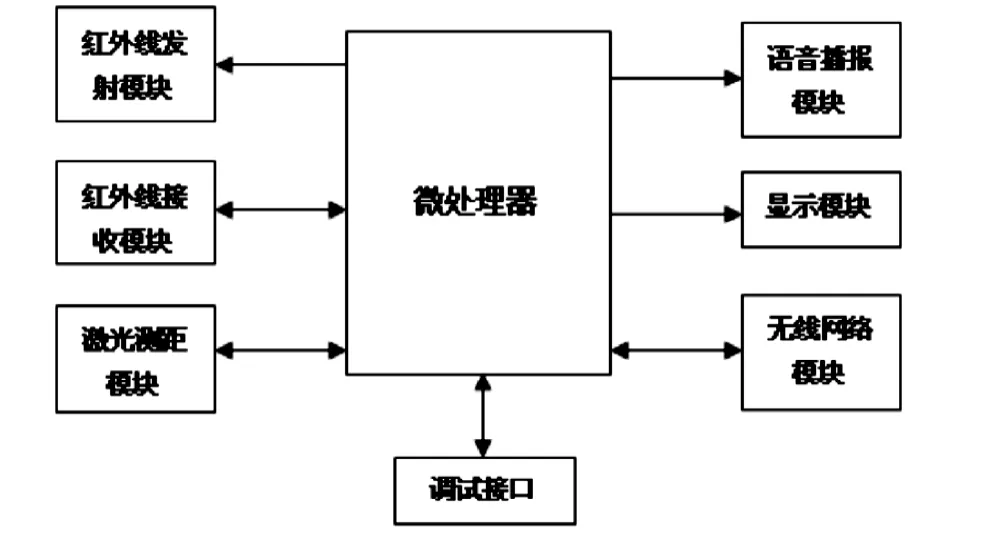
圖1 系統模塊結構示意圖
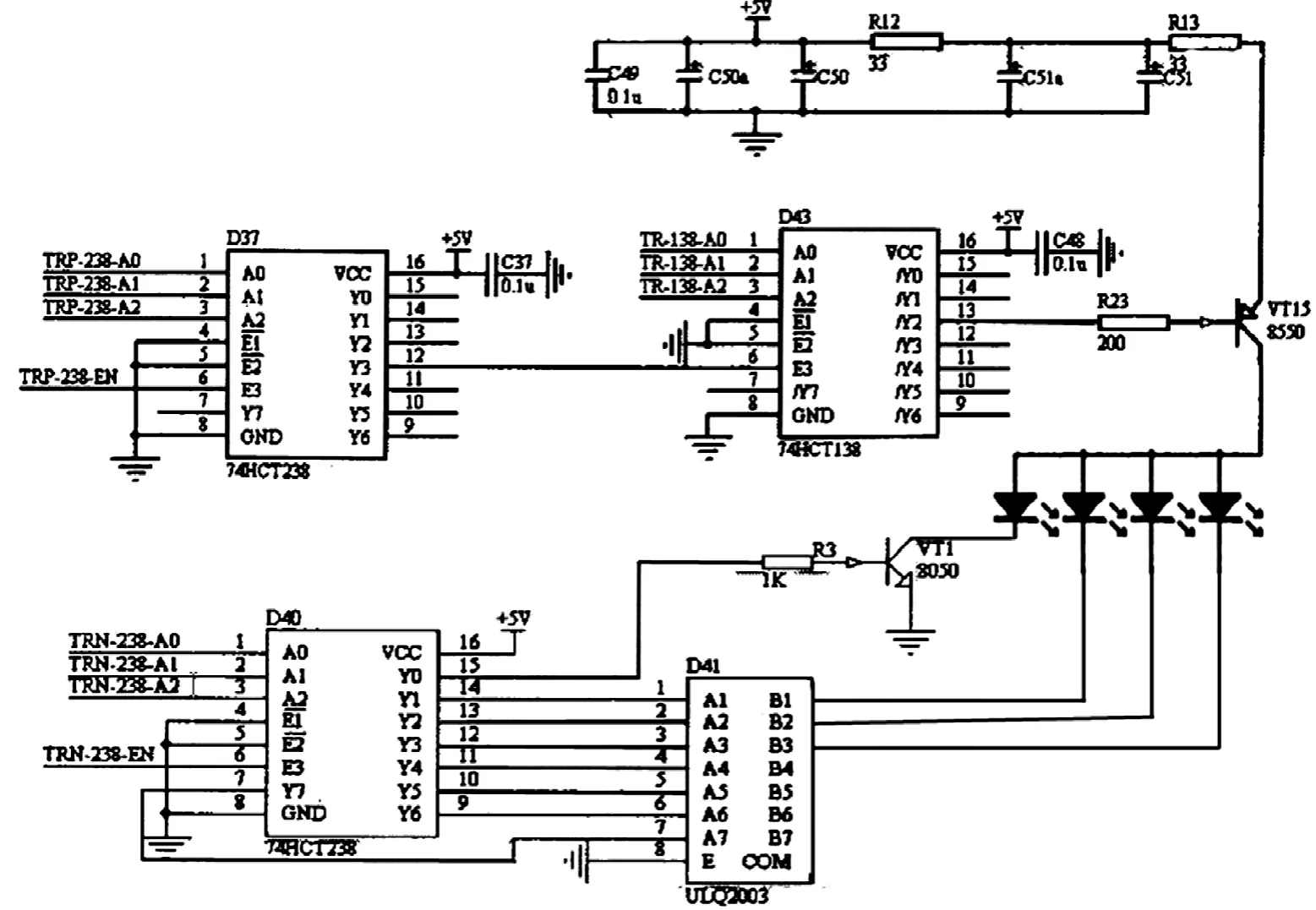
圖2 發射電路示意圖
隨著電子技術不斷的發展,電子技術在體育器材研發中應用成為一種必然,各種電子體育器材出現在體育相關領域。在體育訓練、國民體質監測、體能測試和體育考試等項目中常常需要測試彈跳力,彈跳力的測量主要通過助跑摸高和縱跳摸高進行測試。現有的測試方法主要有人工測試和電子測試兩種。人工測試包含兩種測試方式:一種是被測試者手上沾上白灰去觸摸測試觸摸板,然后用測量尺進行測量。這種測量誤差較大,需要人工讀數,工作量較大,工作效率低;另外一種是在籃筐上涂上上顏色,然后測量顏色到手指長度,再加上籃筐高度,即為測試結果,這種方法測量簡單,但是也存在誤差和人工讀數,另外存在摸不到籃筐的情況。電子測量設備主要采用壓感、電容、電阻和光纖維傳感器,這類摸高器對被測試者的摸高技巧要求較高,否則會影響成績。另外,這四種觸摸屏都是測試在觸屏上進行拍打,對設備壽命有嚴重的影響。
本文提出一種基于紅外線技術的自動摸高測試儀的設計與實現方法,可以對被測試者摸高數據進行自動測量并進行顯示和語音播報,同時將測試數據通過無線網傳給計算機,便于對測試數據進行統計分析。該摸高測試儀可以精確自動測試摸高數據,對被測試者摸高技術要求低,不需要進行參數的設置,使測試更加直觀,便捷,減少工作人員工作量。
2 系統結構及工作原理
系統主要包括紅外發射模塊、紅外接收模塊、激光測距模塊、語音播報模塊、顯示模塊和無線網絡模塊。激光測距模塊采用現在市場上已經封裝好的固定模塊,測量精度要求為1mm,測量距離在3m以上,具有模擬量輸出,顯示模塊、語音播報模塊和網絡模塊采用通用的封裝模塊即可,其他部分自行設計。系統模塊結構如圖1所示。
3 硬件模塊設計
3.1 邏輯控制電路設計
微處理器是測試儀的核心部件,對于系統的穩定性和效率起著決定性的作用[1]。微處理器負責對紅外線發射和接收電路的驅動、對是否摸高動作的完成判斷、測試數據的處理、轉發測試數據到其他模塊和程序調試功能。微處理器采用Silicon Labs公司的C8051F340,該處理器是一個帶有64KB高速Flash存儲器,并支持USB口調試的32/16位處理器。處理速度高達48MIPS,可以大幅度提供系統的處理速度。使用3個I/O引腳來控制驅動紅外線發射部分,使用DS,SH_CP,ST_CP作為紅外線發射管狀態的控制端。由于每個發射管的耐壓峰值為5V,驅動發射管數據較多,防止電流過大,在每個引腳上接入PNP三級管。使用3個I/O引腳作為地址總線信號線, SCL和SDA作為作為總線信號,利用5個引腳來共同驅動紅外接收電路。LPC2132只有兩個片間總線接口,不能實現多片AD轉換器的尋址,故采用74HC4051對地址接口進行擴展。實現對每個紅外線接收管的尋址。2個I/O引腳與激光測距模塊相聯,用來向測距模塊發射觸發信號和接收測距模塊傳回的數據。2個I/O引腳與語音播報模塊和顯示模塊相連,用于測試數據的輸出。
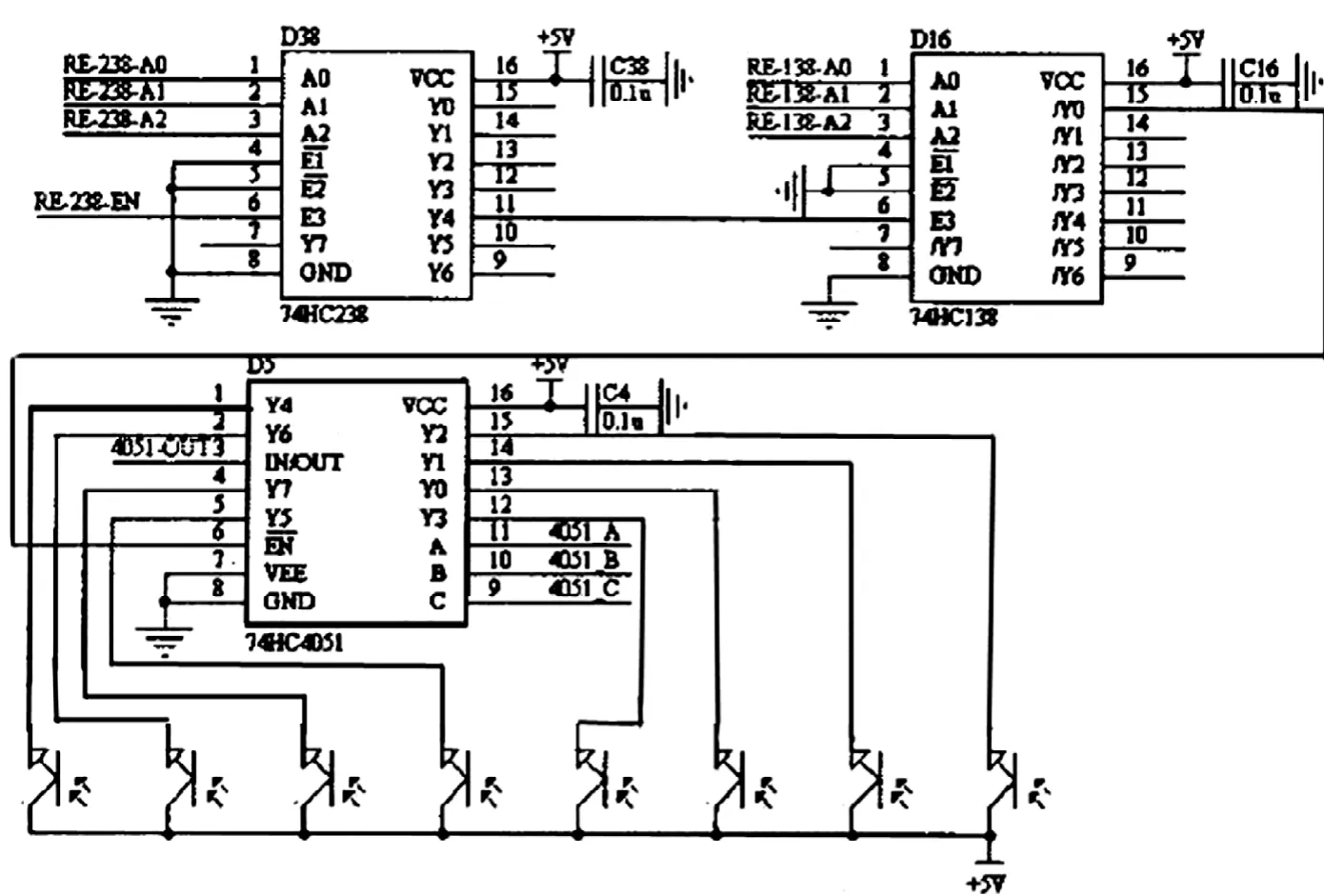
圖3 接收電路示意圖
3.2 紅外線發射電路設計
系統中采用128顆紅外發射管依次縱向排,使測量量程達到68CM。發射電路采用級聯矩陣的逐個掃描的方式,這樣可以減少控制芯片的使用[2]。發射驅動部分采用74HCT138譯碼器、ULQ2003芯片和三級管組成,正極采用74HCT138譯碼器控制,負極由ULQ2003控制。在正極需要有多個74HCT138譯碼器級聯在一起,級聯控制采用74HCT238進行級聯控制。在驅動紅外發射管時要求保持恒定的電流,來保證發射出穩定的強度的紅外光線,防止抖動和跳變的產生,因此采用三級管進行驅動。三級管通過限流電阻連接電源,發射管的正極連接集電極。具體電路如圖2所示。
3.3 紅外線接收模塊設計
在接收端直接接收接收管的電壓值輸送控制單元,也采用逐個掃描的方式,每個時刻只有一只接收管可以接收紅外線。接收部分電路主要使用74HCT4051和74HCT138混合來實現現對接收管的控制。電源與紅外接收的正極相連,負極與控制電路相連。在接收端需要使用多個74HCT138,所以采用74HCT238進行級聯實現每個芯片的選通。每個74HCT138芯片可以控制8顆接收管。具體電路如圖3所示。
3.4 接收管和發射管的排列方式設計
由于接收管和發射管時一對一的,顆粒之間排列的決定了測量精度。因此在設計考慮能夠選擇較小的發射管和接收管,為了能夠更好的實現,接收管和發射管采用交替雙排的設計方式。由于采用較多的紅外管在掃描時就會有時間的延時,為了提高反應速度采用電壓上升速度快的紅外可以大大減低延時,提高系統的反應速度。
4 控制算法設計
系統在運行過程中,當有信號傳遞給控制單元,需要控制單元做出響應,把相應的數據進行處理后,把數據發送給不同的處理模塊。當系統上電或者復位后,發射管中逐次上電點亮,相應的接收管也按照相同的次序、相同時間依次進行接收。在系統中有遮擋信號觸發,則接收管收不到相應的紅外光,此時把相應的元件地址,傳輸給控制單元,控制單元采用寄存器進行存儲,同時記錄時間,啟動計時器。系統繼續進行信號的接收,當有有新的編號大于寄存器存儲的編號時則進行替換,記錄時間,在計時器等待2秒后沒有數據變化則,控制單元根據元件的地址編號進行計算相對摸高距離,同時發送測量信號給激光測距模塊,接收到測距模塊返回的數據后,計算出實際的摸高距離。控制單元把摸高成績發送給語音播報模塊、顯示模塊和無線網絡模塊,完成一次成績測量。當控制單元接收到各個模塊的成功返回值后復位系統。
5 結語
本文介紹了一種基于紅外技術的電子摸高系統的設計方法,通過實驗室條件下制作了實驗板,通過模擬測試取得預期的效果。但是精度還有待于進一步的提高,在以后的研究中通過軟件算法的升級來進一步提高系統的測量精度。
[1]湯世洪.基于FPGA的高分辨率紅外觸摸屏的設計[J].電子設計工程.2011,19(22):161-165.
[2]許剛,王成,蘇力.智能紅外測速系統的設計[J].可編程控制器與工廠自動化,2008,(05):96-98.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
藝術啟蒙(2018年7期)2018-08-23 09:14:18
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
