提取運(yùn)動(dòng)目標(biāo)穩(wěn)健角點(diǎn)算法
2018-06-15 02:08:42宋俊芳
智能城市 2018年10期
宋俊芳
西藏民族大學(xué)信息工程學(xué)院,陜西咸陽(yáng) 712082
角點(diǎn)作為目標(biāo)局部信息最小的一種描述,它對(duì)天氣、光照等環(huán)境變化有較強(qiáng)的適應(yīng)性和旋轉(zhuǎn)不變性,在不丟失圖像數(shù)據(jù)信息的前提下,用它進(jìn)行目標(biāo)的匹配和跟蹤,可以大大減少算法的運(yùn)算量,提高匹配跟蹤的即時(shí)性。尤其是最近幾年,角點(diǎn)被用在目標(biāo)跟蹤、行為分析與理解、交通事件和參數(shù)檢測(cè)等眾多領(lǐng)域,取得了較好的效果。綜述其起源,出現(xiàn)最早的角點(diǎn)檢測(cè)算法是1977年的Moravec算法,借鑒其思路,后來(lái)又陸續(xù)出現(xiàn)了經(jīng)典的Harris算法和SUSAN算法。
但這幾個(gè)經(jīng)典算法都是基于圖像灰度特征的,各有優(yōu)缺點(diǎn)。如Harris算法,它實(shí)際上是對(duì)Moravec算法的一種改進(jìn),由于實(shí)現(xiàn)公式中加了高斯平滑部分, 有效增強(qiáng)了其魯棒性和抑噪能力,但高斯平滑也使該算法的計(jì)算量迅速增加,結(jié)果導(dǎo)致提取角點(diǎn)的速度變得較為緩慢。而SUNSAN 算法在計(jì)算模板面積時(shí)需要將像素點(diǎn)的灰度值離散化, 這就帶來(lái)了較大的量化誤差, 容易導(dǎo)致邊緣點(diǎn)和角點(diǎn)的判斷混亂,因此,它不適合于序列圖像的角點(diǎn)跟蹤,尤其是對(duì)于交通圖像序列這種紋理結(jié)構(gòu)相對(duì)復(fù)雜的場(chǎng)景,檢測(cè)效果更是不理想。雖然后面也有很多學(xué)者針對(duì)這些方法的弊端,提出了很多改進(jìn)算法,但都沒(méi)有考慮到速度這一指標(biāo),當(dāng)遇到大數(shù)據(jù)的處理(交通視頻) 時(shí),執(zhí)行速率明顯較慢。在同一時(shí)期,也有很多研究者不再局限于用圖像的灰度特征來(lái)檢測(cè)角點(diǎn),他們嘗試用邊緣特征來(lái)檢測(cè)角點(diǎn),如基于邊緣鏈碼的角點(diǎn)檢測(cè)、基于小波變換的角點(diǎn)檢測(cè)和基于曲率尺度空間的角點(diǎn)檢測(cè)。這類(lèi)方法的弊端是角點(diǎn)的檢測(cè)精度取決于邊緣輪廓是否被準(zhǔn)確提取,一旦輪廓提取不準(zhǔn)確,那么后面的角點(diǎn)定位將出現(xiàn)大的偏差。所以,這類(lèi)方法的獨(dú)立性較差。
面臨這些問(wèn)題,本文提出先通過(guò)運(yùn)動(dòng)目標(biāo)檢測(cè)將角點(diǎn)的搜索范圍限定到目標(biāo)體上,然后再針對(duì)目標(biāo)窗用角點(diǎn)檢測(cè)算法進(jìn)行掃描,這樣不僅可以提高角點(diǎn)的搜索速度,還可以抑制噪聲的干擾。在這之后,還需要對(duì)角點(diǎn)檢測(cè)的結(jié)果作進(jìn)一步優(yōu)化,本文嘗試了基于區(qū)域檢測(cè)屬性的角點(diǎn)優(yōu)化算法,其最終目的是希望留下的角點(diǎn)不僅穩(wěn)健性好,且分布均勻。
1 基于改進(jìn)幀差法的角點(diǎn)區(qū)域分割
如果在整幅圖像內(nèi)提取運(yùn)動(dòng)目標(biāo)體上的穩(wěn)健角點(diǎn),不僅算法耗時(shí)大,無(wú)法保證系統(tǒng)的實(shí)時(shí)性,而且提取的結(jié)果受背景區(qū)域內(nèi)噪聲的干擾準(zhǔn)確度明顯不高。為解決這一問(wèn)題,在角點(diǎn)檢測(cè)之前,先通過(guò)運(yùn)動(dòng)目標(biāo)分割將穩(wěn)健角點(diǎn)的搜索范圍初步縮小到運(yùn)動(dòng)區(qū)域內(nèi),除掉環(huán)境的干擾。
運(yùn)動(dòng)目標(biāo)分割本文采用改進(jìn)的幀差法實(shí)現(xiàn),將當(dāng)前幀?與第?幀和第?幀分別做差分,并用兩次差分的結(jié)果D1 和 D2做“與”運(yùn)算,得到運(yùn)動(dòng)目標(biāo)的特征信息。這不僅解決了傳統(tǒng)幀差法中可能出現(xiàn)的無(wú)法完整地檢測(cè)出運(yùn)動(dòng)目標(biāo)和漏檢的問(wèn)題,還有效地避免了單次幀差結(jié)果包含非運(yùn)動(dòng)目標(biāo)區(qū)域的現(xiàn)象。
2 基于區(qū)域檢測(cè)屬性的角點(diǎn)優(yōu)化算法
在運(yùn)動(dòng)區(qū)域窗內(nèi)可以用幾種傳統(tǒng)算法來(lái)檢測(cè)角點(diǎn),重要是要對(duì)角點(diǎn)進(jìn)一步做優(yōu)化。本才采用基于區(qū)域檢測(cè)屬性的算法對(duì)角點(diǎn)進(jìn)行優(yōu)化篩選。
該算法先嘗試由用戶(hù)在上位機(jī)調(diào)試出一個(gè)最佳的區(qū)域劃分方式,將場(chǎng)景按照某一大小的模板分區(qū),分區(qū)后通過(guò)上位機(jī)人工設(shè)置各區(qū)域的檢測(cè)屬性,用算法對(duì)屬性為T(mén)的區(qū)域進(jìn)行處理,對(duì)屬性為F的區(qū)域直接舍棄。
對(duì)圖像的區(qū)域劃分初步考慮平均分區(qū),由于每個(gè)攝像機(jī)安裝的路段、位置、角度都不一樣,所以在設(shè)備安裝之后需要調(diào)試出一個(gè)最佳的劃分方式,比如圖1所示的場(chǎng)景,將場(chǎng)景等分為8×7個(gè)塊最佳,圖像區(qū)域劃分如圖1中(a) 圖所示。
分區(qū)后的圖像,通過(guò)上位機(jī)人工設(shè)置各區(qū)域的檢測(cè)屬性,如圖1中(b) 所示,如果是不需要檢測(cè)的區(qū)域,屬性設(shè)置為F,需要檢測(cè)的區(qū)域,屬性設(shè)置為T(mén)。
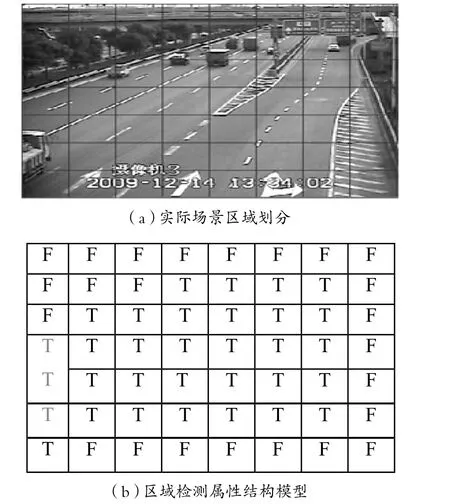
圖1 實(shí)際場(chǎng)景區(qū)域劃分與檢測(cè)區(qū)域?qū)傩詷?biāo)識(shí)
劃分區(qū)域后,在一個(gè)區(qū)域內(nèi)(T區(qū)域) 最多只保留一個(gè)角點(diǎn),且角點(diǎn)需是該區(qū)域內(nèi)可跟蹤度最大的特征點(diǎn),也就是區(qū)域中角點(diǎn)度量值最大的特征點(diǎn),它們的影響度也最高。如果:
那么在這個(gè)區(qū)域內(nèi)就只保留角點(diǎn),其余角點(diǎn)除掉。公式中表示T區(qū)域內(nèi)對(duì)應(yīng)角點(diǎn)位置(x,y) 處的度量值,區(qū)域的寬度范圍是[ ,left right],高度范圍是[ ,bottom top]。
下面對(duì)圖1場(chǎng)景中第一輛卡車(chē)的車(chē)尾部分(箭頭指示的區(qū)域)用此算法選擇最優(yōu)角點(diǎn)。這部分位于檢測(cè)屬性結(jié)構(gòu)圖中第一列的4,5,6行,檢測(cè)屬性都是T,角點(diǎn)的度量值如表1所示,具體選擇過(guò)程如圖2所示。
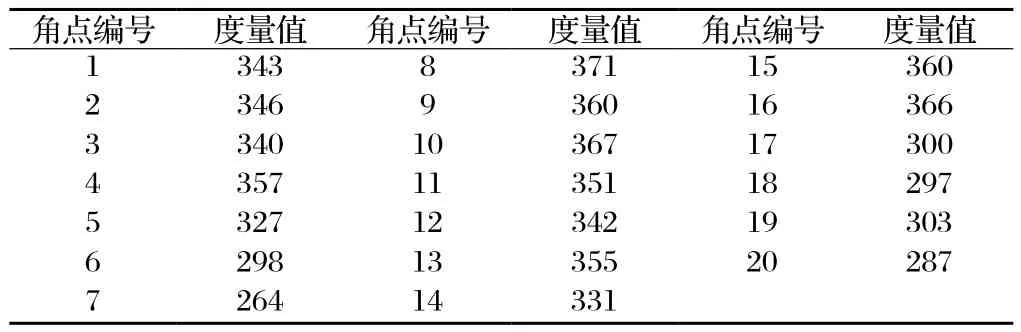
表1 車(chē)尾部分的角點(diǎn)度量值
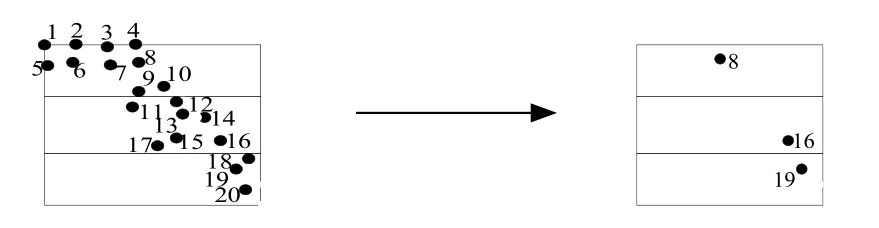
圖2 基于區(qū)域檢測(cè)屬性的角點(diǎn)優(yōu)化過(guò)程示意圖
落入第一列第4行區(qū)域內(nèi)的角點(diǎn)有1,2,3,4,5,6,7,8,9,10這10個(gè)角點(diǎn),角點(diǎn)度量值最大的8號(hào)角點(diǎn)被留下,落入第一列第5行區(qū)域內(nèi)的角點(diǎn)有11,12,13,14,15,16,17這7個(gè)角點(diǎn),角點(diǎn)度量值最大的16號(hào)角點(diǎn)被留下,落入第一列第6行區(qū)域內(nèi)的角點(diǎn)有18,19,20這三個(gè)角點(diǎn),角點(diǎn)度量值最大的19號(hào)角點(diǎn)被留下,其余角點(diǎn)都被刪除,最終在車(chē)尾部分只留下8,16,19這三個(gè)優(yōu)質(zhì)特征角點(diǎn),認(rèn)為是最穩(wěn)健的角點(diǎn)。
3 結(jié)語(yǔ)
基于改進(jìn)幀差法和區(qū)域檢測(cè)屬性的角點(diǎn)選擇算法確實(shí)實(shí)現(xiàn)了去除冗余角點(diǎn)的目的,留下的角點(diǎn)也多選擇在車(chē)輛尾部、后視鏡等特征明顯的區(qū)域,可以很好地用于交通場(chǎng)景中的車(chē)輛角點(diǎn)獲取。
[1] Dey N, Nandi P, Barman N, et al.A Comparative Study between Moravec and Harris Corner Detection of Noisy Images Using Adaptive Wavelet Thresholding Technique[J], 2012.
[2] 楊莉,張弘,李玉山.一種快速自適應(yīng)RSUSAN角點(diǎn)檢測(cè)算法[J].計(jì)算機(jī)科學(xué),2004(5) :198-200.
[3] Zeng Z Y, Jiang Z Q, Chen Q, et al.An Improved Corner Detection Algorithm Based on Harris [J]. 2012: 717-721.
[4] 黃 華 川, 張 涅 萍.基于協(xié)方差矩陣和小波變換的角點(diǎn)檢測(cè)算法[J].制造業(yè)自動(dòng)化, 2010,32(11) : 21-22.
[5] 張 小 洪, 雷 明, 楊 丹.基于多尺度曲率乘積的魯棒圖像角點(diǎn)檢測(cè)[J].中國(guó)圖象圖形學(xué)報(bào), 2007,12(7) : 1270-1275.
[6] 夏 輝,穆希輝,馬振書(shū),等.基 于 支 持向 量機(jī)的角點(diǎn)檢測(cè)方法研究[J].計(jì)算機(jī)應(yīng)用與軟件,2009, 26(1) :230-231.
[7] 陳磊,鄒北驥.基于動(dòng)態(tài)閾值對(duì)稱(chēng)差分和背景差法的運(yùn)動(dòng)對(duì)象檢測(cè)算法[J].計(jì)算機(jī)應(yīng)用研究, 2008,25(2) :488-494.
猜你喜歡
今日農(nóng)業(yè)(2021年9期)2021-11-26 07:41:24
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
發(fā)明與創(chuàng)新·小學(xué)生(2021年3期)2021-03-25 11:48:49
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
中國(guó)科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44