第三方引導下的極區超視距目標指示方法*
2018-06-22 06:41:48孫永侃張萍萍
現代防御技術 2018年3期
關鍵詞:模型
孫永侃,張萍萍
(海軍大連艦艇學院,遼寧 大連 116018)
0 引言
超視距目標指示是戰場態勢感知的重要依據,是實施超視距導彈攻擊的基本前提,是作戰資源管理的重要依據,對提高作戰效能和生存能力具有極為重要的現實意義[1-2]。超視距目標信息的指示流程為:第三方探測兵力對指定海空域進行目標搜索與探測,檢測到目標后,超視距探測兵力將批號、方位、距離和速度、航向等目標數據及探測兵力自身位置信息實時傳送給本艦。本艦接收到對接收到的信息進行濾波融合等數據處理,轉換成可直接使用的目標數據,提供給雷達、武器系統以及指揮員進行目標指示[3-5]。特殊的地理環境使極區超視距目標跟蹤的重要性提升,但超視距目標跟蹤中的目標參數表示方法不能適應極區超視距目標指示的高精度需求,相關文獻對提高超視距目標指示精度提出各自的看法與解決方法[6-10],但這些研究沒有考慮極區特殊的地理環境對超視距目標指示的影響,沒有考慮傳統超視距目標指示方法在極區的使用缺陷,因此要滿足極區艦艇作戰指揮需求,必須尋求合適的解決方法來提高極區超視距目標指示精度。
1 構建橫向地球坐標系與橫向地理坐標系
傳統地理位置的表示采用經緯度方式[11],由于極區經線收斂導致地理北迅速收斂于北極點,進而導致目標方位角的誤差增大,本文提出改變傳統經緯網格的定義,提出將地球球面以另外一種方式進行劃分,將地球極區轉變為虛擬赤道地區,從而將極區運動狀態參數解算問題轉化為虛擬赤道地區的運動狀態參數解算問題。
依據這一假設,本文提出在虛擬的經緯網格中,將虛擬極點定義為地理赤道上某點,將虛擬赤道定義為穿過地理極點的大圓,然后依據虛擬赤道和虛擬極點設置虛擬緯線和虛擬經線,虛擬經線為收斂于虛擬極點的大圓,虛擬緯線平行于虛擬赤道面,本文將虛擬的經緯網格稱為橫向經緯網格,橫向經緯網格中的經度稱為橫向經度,橫向經緯網格中的緯度稱為橫向緯度,采用橫向經緯度對地理位置進行表示。
依據上述思路,在以橫向經緯網格對地球球面上的某點進行位置表示時,為了使傳統經緯網格與橫向經緯網格之間的轉換關系盡量簡便,在橫向經緯網格中,定義橫向北極點位于東經90°,緯度為0°的赤道處,橫向南極點位于西經90°,緯度為0°的赤道處,定義橫向赤道位于0°經線和180°經線上,定義橫向本初子午線為經過北極點的90°E/90°W子午線。如圖1所示。
為了將地理位置用橫向經緯度表示,為了將橫向地理北作為方位參考,本文提出在建立橫向經緯網格的基礎上建立橫向地球坐標系與橫向地理坐標系。
1.1 橫向地球坐標系的建立
在橫向地球坐標系中,原點仍定義為地球坐標系中的原點地球質心Oe,橫向赤道面為OexTeyTe,橫向本初子午面OexTezTe。橫向地球坐標系如圖2所示,在橫向地球坐標系中,球面任意一點M點的位置用橫向經緯度坐標來描述,即橫向經度λT和橫向緯度φT,其中:橫向經度λT為橫向本初子午面與通過M點的橫向子午面之間的夾角,橫向緯度φT為M點和地球質心連線與橫向赤道面之間的夾角。
1.2 橫向地理坐標系的建立
下面依據橫向地球坐標系Oexeyeze建立相應的橫向地理坐標系OtxTtyTtzTt,首先對坐標系作如下定義:設地球坐標系為e系;橫向地球坐標系為Te系;地理坐標系為t系;橫向地理坐標系為Tt系;緯度為φ;經度為λ;橫向緯度為φT;橫向經度為λT;地球半徑為R(假設地球為球體)。橫向地理坐標系的原點與地理坐標系中的原點為同一點,yTt軸指向沿當地橫向經線指向橫向北極點的橫向北,zTt軸沿地理垂線指向上,xTt軸的方向在當地水平面內沿當地橫向緯線的切線方向指向橫向東,這樣就建立了橫向東-北-天坐標系,如圖2所示。
2 構建基于橫向地球坐標系的大地主題解算模型
超視距目標指示不是通常意義的視距內或平面上的距離方位,而是需要特殊轉換的、地球表面的大圓弧長和方位角,通常采用大地主題解算模型進行轉換。因此為了實現大地極坐標轉換到橫向地球坐標系的變換,本文基于橫向地球坐標系建立大地主題解算公式,對橫向地球大地主題解算的正解與反解公式進行求解,從而將傳感器測量的目標的大地弧長距離以及方位角轉化為目標的橫向經緯度。同時由于在極區(特別是近極點地區)地理北不易作為方位基準,本文提出將位置坐標用橫向地球坐標表示,將橫向地理北作為方位基準,將目標方位用橫向方位角 (即目標方位線與橫向地理北的夾角)來表示,對應的大地主題解算為橫向地球大地主題解算。
對于將地球近似成圓球體,橫向地球大地主題解算問題就變成了求解球體上橫極球面三角形(即地球橫向北極點與2個大地點組成的三角形) 的問題。如圖3所示。

(1)
(2)
sinφT1cosφT2cos ΔλT,
(3)
cosφT1sinφT2cos ΔλT,
(4)
cosS12= sinφT1sinφT2+
cosφT1cosφT2cos ΔλT,
(5)
cosφT2cos ΔλT= cosφT1cosS12-
(6)
(7)
(8)
(9)
Δλ=λT2-λT1.
(10)
2.1 構建橫向地球大地主題解算正解模型

首先按式(9)求出sinφT2,再用下式求取φT2:
(11)
在求取λT2時,可先求出橫向經差,ΔλT取式(1)除以式(6)就可以得到
(12)
(13)
2.2 構建橫向地球大地主題解算反解模型
(14)
(15)

(16)
式中:p=sin ΔλTcosφT2;q=cosφT1sinφT2-sinφT1·cosφT2cos ΔλT。
3 構建基于橫向地球坐標系的目標運動模型與目標觀測模型
3.1 構建基于橫向地球坐標系的極區超視距目標運動模型
對于艦艇類大質量動目標的機動跟蹤的基礎是對勻速直線運動方式和勻速慢轉彎運動機動方式的跟蹤[12],因此本文使用CT模型來描述目標運動。
假設采樣時間間隔為T, 令k時刻橫向地球坐標系下的目標狀態向量為
Xk=(λT,φT,v,ψT,ω)T
,
式中:λT,φT為k時刻目標的橫向經度和橫向緯度;ν為k時刻目標運動速度;ψT為k時刻目標運動的橫向航向角;ω為k時刻目標運動角速度。
則橫向地球坐標系下的目標運動方程如下
X(k+1)=f(X(k),k)+W(k),
(17)
式中:W(k)為均值為0、協方差為Q(k)的高斯噪聲序列;f(X(k),k)為
(18)
式中:r為地球半徑。
3.2 第三方引導信息進行目標觀測情況下的目標觀測模型建立
通過數據鏈進行第三方引導信息的遠程目標指示與跟蹤。數據鏈目標指示的內容有2種情況:
(1) 第三方僅提供包括經度和緯度的目標位置信息,但不提供目標運動參數。
(2) 第三方既提供包括經度和緯度的目標位置信息,也提供包括航向和航速的目標運動信息。
下面對這2種情況分別進行研究。
3.2.1 第三方僅提供目標位置參數情況下的目標觀測模型構建
由于第三方僅能提供目標位置參數經度緯度,因此觀測向量為
Z[k]=(λ,φ)T.
(19)
觀測方程為
Z[k]=h(k,X(k))+V[k],
(20)
式中:h(k)為均值為0、協方差為R(k)的高斯噪聲序列。
則觀測向量Z[k]與狀態向量X[k]的函數關系h(X(k),k)可以通過橫向經緯度與經緯度之間的變換得到如下:
(21)
3.2.2 第三方提供目標位置及運動參數情況下的目標觀測模型構建
由于第三方可提供目標的經緯度、速度以及航向信息,則觀測向量可設置為
Z[k]=(λ,φv,ψ)T.
(22)
則觀測量Z[k]與狀態向量X[k]的函數關系h(X(k),k)可以通過橫向經緯度與經緯度之間的變換得出如下
(23)
4 構建基于橫向坐標系的無跡卡爾曼濾波模型
與傳統直角坐標系下的濾波不同,橫向地球坐標系下,第三方引導信息進行目標觀測時的觀測方程是復雜的非線性方程,傳統的用于非線性系統的擴展卡爾曼濾波不再適用,無跡卡爾曼濾波(unscented Kalman filter)避免了對非線性模型的線性化處理,不需要對雅可比矩陣求導,比擴展卡爾曼濾波有更高的估值精度[13-15],因此本文提出將UKF算法運用到橫向地球坐標系下的超視距目標跟蹤中。

(24)
(25)
(26)
(27)
(28)
(29)

yi=f(χi),i=1,2,…,2n+1.
(30)
(31)
(32)
構建UT變換模型后,可以進行UKF濾波,為了對本文建立的高緯度地區第三方引導下的超視距目標指示模型進行驗證,下面進行仿真與分析。
5 仿真與分析
仿真條件設置如下:
假設目標初始經緯度為(100°,78°) ,即初始橫向經緯度為(-2.113 8°,11.815°),初始橫向航向為。如表1所示,目標首先作勻速直線運動,然后直線加速又直線減速,緊接著,目標以恒定速率作蛇行機動,然后,目標再作直線加速,最后以一恒定速率勻速直線運動。
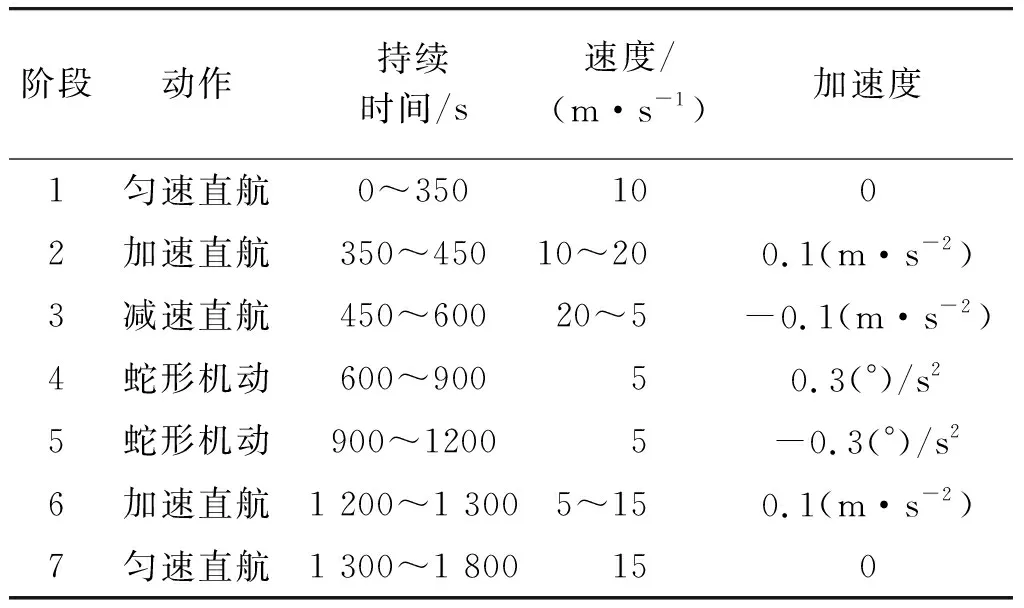
表1 目標運動軌跡Table 1 Target trajectory
假設仿真實驗目標運動的初始狀態值為X(0)=(-2.113 8°,11.815°,10,36.87°,0)T、P(0)=diag(10-6,10-6,100,100,1),系統噪聲陣為Q(k)=diag(10-8,10-8,1,1,0.01)。目標運動軌跡如圖4所示。目標速度變化曲線如圖5所示。
根據前文構建的基于橫向地球坐標的極區超視距目標運動模型和觀測模型,采用UKF算法進行濾波,UKF參數設置:(α=0.01,β=2,k=0)濾波采樣間隔T=10 s,對采用第三方引導信息進行目標觀測的2種情況進行了仿真實驗。
(1) 對第三方僅提供目標位置(經緯度)的情況進行仿真。
假設位置誤差為1 n mile,觀測噪聲為R(k)=diag((1 852/(r·cosφ))2,(1 852/r2),采用UKF算法進行濾波,將得到的位置估計與目標的真實運動軌跡的比較結果如圖6所示;并進行50次蒙特卡羅(Monte Carlo)仿真得到各測量時刻的位置均方根誤差,如圖7所示。
(2) 對第三方可提供目標位置(經緯度)、速度、航向的情況進行仿真。
假設位置誤差為1 n mile,速度誤差0.1 kn,航向誤差0.1°。則觀測噪聲為,R(k)=diag((1 852/(r·cosφ))2,(1 852/r)2,0.01,(0.5π/1802))采用UKF算法進行濾波,將得到的位置估計與目標的真實運動軌跡的比較結果如圖8所示;并進行50次蒙特卡羅(Monte Carlo)仿真得到各測量時刻的位置均方根誤差,如圖9所示。
由圖6~9可以看出, UKF算法對目標位置跟蹤的效果是非常好的,初始狀態下, 濾波曲線能很快收斂到真實航跡附近,跟蹤曲線也比較平穩。當第三方引導時,增加目標速度和航向觀測信息時,比僅提供位置進行觀測的跟蹤效果好。仿真分析的結果表明:基于橫向地球坐標系的極區超視距引導中的目標跟蹤模型,避免了坐標系間的多次轉換,提高了目指信息的精度。
6 結束語
針對傳統超視距目標指示中將目標的位置信息轉換到以融合中心為原點的平面直角坐標系中進行目標指示所引入的目指信息偏差問題,提出將橫向地球坐標系引入極區超視距目標指示系統中,將目標位置用唯一的一組橫向地球坐標來描述。通過構建基于橫向地球坐標系的大地主題解算模型,將目標的位置信息轉換到橫向地球坐標系中,進一步建立基于橫向地球坐標系的目標運動模型和目標觀測模型,并針對由此產生的目標狀態方程和觀測方程的非線性特性,提出基于UKF算法的濾波模型,仿真分析的結果表明,該模型有效提高了超視距目標跟蹤精度,能夠有效滿足極區艦艇作戰指揮需求。
參考文獻:
[1] 譚飛勇,曹之新,鄭曉暉.引導兵力確定目標位置方法及精度研究[J].艦艇電子工程,2010,30(5):94-97.
TAN Fei-yong,CAO Zhi-xin,ZHENG Xiao-hui.Research of Method and Precision on the Lead Troops Decision Object Position[J].Ship Electronic Engineering,2010,30(5):94-97.
[2] 王德強,黃雙華,劉峰,等.岸基雷達超視距引導誤差分析[J].艦艇電子工程,2008,28(12):89-91.
WANG De-qiang,HUANG Shuang-hua,LIU Feng,et al.Analysis of OTH Leading Error by Radar Eased on Shore[J].Ship Electronic Engineering,2008,28(12):89-91.
[3] 王鋼,賈世樓,張琦.超視距目標指示的方法與性能研究[J].哈爾濱理工大學學報,2006,11(6):110-113.
WANG Gang,JIA Shi-lou,ZHANG Qi.Study on the Methods and Performance of OTHT[J].Journal Harbin Univ.Sci & Tech,2006,11(6):110-113.
[4] 朱漢雨,榮海洋.偵察兵力通過數據鏈傳遞目標指示的方法探討[J].指揮控制與仿真,2007,29(1):61-62.
ZHU Han-yu,RONG Hai-yang.Methods of Scouting Plane Transmitting Object Information to Submarine Through Data Link[J].Command Control & Simulation,2007,29(1):61-62.
[5] 朱士龍,張佳忠,顧浩.超視距目標信息仿真測試技術研究[J].系統仿真學報,2004,16(8):1701-1704.
ZHU Shi-long,ZHANG Jia-zhong,GU Hao.Research on Beyond Visual Range Target’s Information Simulation Test Technology[J].Journal of System Simulation,2004,16(8):1701-1704.
[6] 吳云橋,段立,耿伯英.基于大地坐標的多艦協同超視距目標指示研究[J].艦艇電子工程,2008,28(10):60-63.
WU Yun-qiao,DUAN Li,GENG Bo-ying.Research on Multi-Warship Collaboration over Horizon Target Indication Based on Geodetic Coordinates[J].Ship Electronic Engineering,2008,28(10):60-63.
[7] 盧江濤,楊露菁,段立.一種應用于超視距目標指示的誤差分析方法[J].指揮控制與仿真,2007,29(2):88-91.
LU Jiang-tao,YANG Lu-jing,DUAN Li.An Error Analysis for Over-Horizon Target Designation[J].Command Control & Simulation,2007,29(2):88-91.
[8] 徐清華,徐海剛,李中良.直升機超視距主動引導定位誤差分析[J].指揮控制與仿真,2006,28(10):60-63.
XU Qing-hua,XU Hai-gang,LI Zhong-liang.Analysis on OTH Active-Guiding Positioning Error for Helicopters[J].Command Control & Simulation,2006,28(10):60-63.
[9] 趙凱,楊維,石德乾,等.自行裝備間目標指示與導引精度分析[J].火炮發射與控制學報,2010(1):71-75.
ZHAO Kai,YANG Wei,SHI De-qian,et al.Analysis on Target Indication and Guidance Accuracy Among Self-Propelled Equipments[J].Journal of Gun Launch & Control,2010(1):71-75.
[10] 張鑫博,楊曉萍.數據鏈遠程目標指示位置誤差計算方法研究[J].現代電子技術,2014,37(2):13-15.
ZHANG Xin-bo,YANG Xiao-ping.Calculation Method for Position Error of Data Link Remote Target Designation[J].Modern Electronics Technique,2014,37(2):13-15.
[11] 邱云峰,倪津,楊映泉,等.基于CGCS2000下地方大地坐標基準的建立與應用[J].測繪工程,2013,22(4):42-44.
QIU Yun-feng,NI Jin,YANG Ying-quan,et al.On the Establishment and Application of Local Geodetic Coordinate Datum Based on CGCS2000[J].Engineering of Surveying and Mapping,2013,22(4):42-44.
[12] 孫晏濤.水面艦艇運動仿真模型研究[J].艦船電子工程,2011,31(6):118-121.
SUN Yan-tao.Research on Surface Ships Motion Simulation Model[J].Ship Electronic Engineering,2011,31(6):118-121.
[13] 陳云峰.目標跟蹤中非線性濾波[D].南京:南京理工大學,2007.
CHEN Yun-feng.Nonlinear Filter of Target Tracking[D].Nanjing:Nanjing Science and Engineering University,2007.
[14] 于翔川.基于非線性濾波的目標跟蹤算法研究[D].西安:西安電子科技大學,2009.
YU Xiang-chuan.Target Tracking Algorithms Based on Nonlinear Filtering[D].Xi′an:Xidian University,2009.
[15] 侯磊.機動目標跟蹤算法的研究[D].大連:大連海事大學,2015.
HOU Lei.The Research on Maneuvering Target Tracking Algorithm[D].Dalian:Dalian Maritime University,2015.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19